基于滑模控制的轨道式无线电能传输系统设计
2024-03-29赵荣强
赵荣强, 胥 飞
(上海电机学院 电气学院, 上海 201306)
无线电能传输(Wireless Power Transmission, WPT)具有安全、便捷、用户体验好等优点,得到广泛关注[1-3]。由于WPT可以实现无接触式电能传输[4],被广泛应用于固定式充电和动态式充电,如电动汽车[5-6]、物流传送等方面。由于WPT 系统的发射线圈与接收线圈之间并不完全耦合,从而导致WPT效率不高,因此需要加入补偿模块,以提高电能的传输效率[7-8]。为优化输出特性,文献[9-12]分别提出了LCL、LLC、CLC以及LCC等高阶谐振补偿拓扑。传统轨道式WPT 系统大多采用串联串联的低阶补偿拓扑,文献[13]的接发线圈采用E型铁氧体结构,需要铁氧体物料成本更高,较大的等效内阻造成效率低于75%。
本文提出一种基于新型接发线圈结构的LCC-S型补偿拓扑的WPT系统,采用利兹线缠绕C型铁氧体作为接收线圈,并套在轨道式双匝线圈组成的发射线圈上。相比传统串联串联型补偿拓扑的轨道式WPT结构,该结构等效电阻较小,传输效率较高,电压增益可调,且输出特性更好,可用于物流传送、流水线供电等方面。本文为便于接收端电压控制,选择接收端为恒压输出特性的LCC-S型高阶补偿结构进行设计,并加入基于滑模控制的稳压控制器进行双端控制,以达到接发线圈相对位置变化时电压保持不变的目的。最后,通过搭建实验平台验证所设计的新接发线圈结构和滑模控制器的可行性。
1 基于LCC-S的WPT系统建模
基于LCC-S的WPT 等效电路如图1所示。图中,R0为发射端的补偿内阻;Rp、Rs分别为发射线圈、接收线圈的内阻;Lp、Ls分别为发射线圈、接收线圈的自感;M为接发线圈之间的互感;Cfp、Cp分别为发射端并联、串联补偿电容;L0为发射端补偿电感;Cs为接收端补偿电容;Us为直流电源逆变后的交流电;I0、I1、I2分别为补偿线圈、发射线圈、接收线圈的电流;Rload为负载电阻。
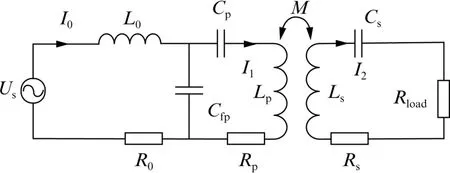
图1 基于LCC-S的WPT系统等效电路
由图1可知,接收端阻抗为
式中:ω为系统谐振角频率。
接收端侧反射至发射侧的等效阻抗为
式中:M=K LpLs,K为线圈耦合系数。
系统总输入阻抗为
为实现系统谐振,发射端并联电容Cfp需与发射端补偿电感L0谐振,串联补偿电容Cp、并联补偿电容Cfp和发射线圈电感Lp也要形成谐振,使得发射线圈电流近似等于逆变电路输出电流,此时各参数因满足:
由式(4)和式(5)可知,Lp>L0,令L0=aLp,a为常数且0<a<1。由式(4)~式(6)可计算出补偿电容值为
代入电容值后,发射端补偿拓扑谐振频率、接收端补偿拓扑谐振频率和耦合线圈的谐振频率与系统谐振频率相同,系统完成磁耦合谐振,此时系统反射阻抗和输入阻抗可简化为
忽略线圈寄生电阻,各支路电流为
此时系统传输效率为
忽略线圈寄生电阻,简化式(12)~式(14)并计算出负载两端电压和输出电流为
从式(16)、式(17)可以看出,在忽略内阻的情况下输出电压与发射端补偿电感L0、互感M、输入电压Us有关,与负载电阻值无关,因此可以大致实现变负载恒压,但是互感变化时不能恒压,需加入控制电路保证系统稳定供电。
2 接收端对系统效率的影响
电磁耦合线圈是WPT系统的关键部件,本文将从磁芯结构、导线特性、负载特性等三方面论述接收端对系统效率的影响[14]。
2.1 接收端磁芯结构的影响
轨道式WPT系统与松耦合变压器相比,具有接发线圈气隙大、轨道线圈长等特点,因此轨道线圈与接收线圈之间的漏感大、耦合系数低,从而使发射端的能量向接收端转移十分困难。因此,合理设计铁氧体磁芯结构,可减少漏磁通,提高系统效率。通过式(15)可知,影响效率的因素主要有接收线圈内阻、耦合系数及负载电阻大小,因此,在设计磁芯结构时,应使得在互感合适的情况下,线圈内阻尽量小。传统轨道式WPT 系统采用E型铁氧体磁芯如图2(a)所示,本文提出一种C型铁氧体磁芯结构,如图2(b)所示。
通过在Maxwell电磁仿真软件中搭建接发线圈模型可以求解出线圈自感、等效电阻和它们之间的互感[13]。该软件可以利用静磁场、涡流场或瞬态场等对两侧谐振线圈完成三维的有限元仿真。利用Maxwell电磁仿真软件对传统E型磁芯结构和本文提出的C 型铁氧体结构进行电磁耦合仿真。
发射端线圈设为3000股线径0.1mm 利兹线绕双匝形成8m 供电轨道。根据E型和C型铁氧体尺寸数据设置相关参数,建立发射端和接收端线圈耦合模型,分别将E型和C型铁氧体磁芯组成的接收端线圈套在发射线圈轨道上,设置接收线圈导线直径为8mm,导线截面积为1mm2,谐振频率为85kHz,在E型和C型铁氧体磁芯上分别绕15及31 匝,使得互感相同,发射端通入高频交流电。
在参数选项卡中选择矩阵,添加两线圈,并勾选测量接发线圈之间的互感、自感和耦合系数,便可在结果选项卡中得出相关参数,导出C型与E型接收装置参数并对比,如表1所示。
由表1可知,大致相同的互感下,接收端为E型铁氧体磁芯的接收线圈与发射线圈的互感较高,但是等效电阻较大,以下分析这两个参数对系统效率的影响。
2.2 接收线圈导线特性的影响
为研究耦合系数和接收线圈等效电阻对系统效率的影响,设定系统工作频率为85kHz,确定互感系数之后计算得出其他补偿元器件的参数,将表1中的线圈自感、耦合系数等参数代入式(10)、式(12)、式(16)中,绘制耦合系数分别为0.27 和0.18时,系统效率随接收线圈等效电阻变化的曲线,如图3所示。
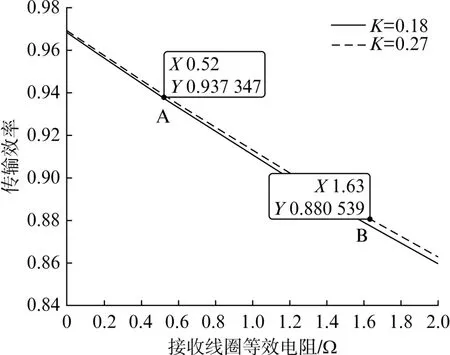
图3 不同耦合系数下等效电阻和效率关系
由图3可知,在相同电阻下,耦合系数高的E型铁氧体传输效率较高,但是系统传输效率随着接收线圈等效电阻的增大而减小更为明显。通过A、B两点可知,C型铁氧体结构的接收线圈效率比E型铁氧体结构的接收线圈高将近6%,并且C型铁氧体磁芯更适合在轨道上移动,因此本文选择C型铁氧体磁芯,可提高系统效率。
2.3 负载阻值对传输效率影响
为寻求负载阻值对传输效率的影响,将表1中C型铁氧体参数代入式(10)~式(12)、式(16)中,利用Matlab绘图软件,系统最佳效率点的阻值为16Ω,由此可得C型铁氧体构成的WPT系统各项参数如表2所示。

表2 C型铁氧体系统参数
3 LCC-S型WPT系统仿真设计
为实现LCC-S 型WPT 系统能稳定高效供电,本文利用Matlab/Simulink仿真软件搭建了仿真模型,为模拟负载在轨道上运动时耦合系数发生变化,利用松耦合变压器模型可设置发射线圈和接收线圈的自感和等效电阻及两者之间的互感。采用阶跃信号发生器模块控制开关控制3个耦合系数分别为0.18、0.13、0.21的松耦合变压器模型,分别在0s、0.03s、0.06s时刻接入电路。不加控制开始仿真,发现输出电压会随耦合系数的变化而变化。为保证系统能稳定供电,本文采用双端控制,在接收端增设BUCK电路,通过控制发射端逆变器占空比及BUCK 电路占空比达到稳压目的。传统PI控制调节参数较多,响应速度慢,对扰动比较敏感。本文提出一种无抖振滑模控制方法以消除滑模抖振,使得滑模面趋近速度快,相比PI控制,无抖振滑模控制只需输入较少的信号即可控制输入电流和输出电压,暂态性能和鲁棒性均可达到应用要求[15]。
在Matlab/Simulink仿真软件中搭建了双端无抖振滑模控制仿真模型,现有一系统状态方程˙x=f(x,u,t),x,u,t∈R。滑模面设计如下:
式中:α、β为滑模系数,需满足Hurwitz条件即都大于0。
令s=0,将系统电路方程代入滑模面,可得
高新区搞活存量盘活 促进高效利用见真章(薛文奇) ....................................................................................3-55
将滑模面对时间求导,可得
式中:ζ为阻尼系数,ζ=0.5α;ωn为无阻尼自然振荡频率,ωn=。
本文采用基于等速趋近律的积分滑模控制,设计要求快速逼近滑模面,所以本文针对过阻尼状态设计滑模系数,选取ζ=1.3,衰减系数代表系统调节时间,决定控制器的控制速度。滑模系数α=,β=,系统响应速度τ取值越大,系统响应越慢;τ取值越小,系统响应越快。考虑到滑模控制律中包含的滤波电容Cf取值较小,所以选取α=4.6×106,β=3.13×1012。为保证<0,滑模控制律如下:
利用Matlab/Simulink搭建对应模型,进行仿真,在0.03s和0.06s时刻改变互感值,并与基于PI控制所得到的输出电压波形进行对比,如图4所示。

图4 闭环‐互感改变‐输出电压波形
从电压波形来看,在0.03s和0.06s时刻耦合系数发生变化时,PI控制要经过2.36ms后才能稳定到预设值15V,且超调量及纹波较大,而滑模控制系统仅需1.47ms即可稳定到预设值,纹波及超调量更小,能够很好应对接收端在轨道上运动时耦合系数不稳定的情况。
4 系统设计与实验验证
为验证上述理论的正确性,搭建实验平台。设定系统工作频率为85kHz,逆变电路PWM 波的频率为85kHz,保证整个系统在同一谐振频率下。发射端接收端采用STM32F103C8T6完成PWM 信号产生及电压电流信号的采集,通过编程实现移相控制,将直流电逆变为85kHz的高频交流电,输入LCC补偿模块,接收端同样通过STM32F103C8T6的ADC1的PA4引脚设置为独立模式完成信号采集后送入芯片,通过蓝牙模块与发射端逆变板进行通信,加入滑模算法控制占空比输出,完成对电压的控制。
为研究接发线圈相对位置变化对输出电压的影响,可将发射端线圈慢慢抬升,控制其他参数不变,使接发线圈距离由开始时距离为0cm 分8次增加至4cm。通过示波器观察不加控制、加入PI控制、加入滑模控制的输出电压,得到实验数据绘制出电压随接发线圈相对距离变化如图5所示。
通过输入功率除以输出功率可以得到系统效率,3种控制方法传输效率如图6所示。
由图5、图6可知,滑模控制算法稳压效果明显优于其他两种控制方法,根据负载要求,输出电压与预设值15V 偏差不能高于0.5V,所以只有滑模控制算法能满足系统接发线圈距离为0~3cm 时稳压输出,在效率方面不加控制时系统效率最高,而滑模控制的效率要比PI控制的效率高5%左右。
5 结 论
本文首先借助Maxwell仿真对比C型铁氧体和E型铁氧体磁芯绕制的发射线圈的相关参数,并使用Matlab进行分析,证明C型铁氧体的传输效率较高。然后,通过数学建模确定了LCC-S拓扑结构的谐振条件,根据已知参数设计其他元件参数,并在Matlab/Simulink里分别搭建基于PI控制和滑模控制的仿真模型进行对比,证明滑模控制效果要优于PI控制。最后,搭建实验样机进行实验,实验证明当接发线圈相对位置在0~3cm 变化时,滑模控制算法能满足电压偏差小于0.5V的要求,并且传输效率要高于PI控制算法。
