科研资讯
2024-03-28
中国科大发展关联量子传感技术实现点缺陷的三维纳米成像
中国科学技术大学中国科学院微观磁共振重点实验室杜江峰、王亚等人在量子精密测量领域取得重要进展,提出基于信号关联的新量子传感范式,实现对金刚石内点缺陷的高精度成像,并实时观测点缺陷的电荷动力学。这项研究成果以Correlated sensing with a solid-state quantum multisensor system for atomic-scale structural analysis为题,于2024 年1 月5 日在线发表在Nature Photonics上。
最近二十多年时间里,量子传感的发展已经使得很多物理量的测量技术取得了革命性的进展。比如基于纳米尺度的金刚石氮-空位色心量子传感器有望实现单分子的结构解析(杜江峰院士团队前期工作:Nature Physics10,21 (2014);Science 347,1135 (2015);Nature Methods 15,697(2018))。以磁测量为例,当前实现结构解析的量子传感范式需要对标记的自旋探测目标进行量子操控。然而,自然界中的很多物理现象既不包含自旋也无法直接操控,如半导体中的电荷动力学导致的随机电报信号等。更重要的是,当多个探测对象信号重叠,相互干扰,单个量子传感器将无法对信号进行有效提取与分析。
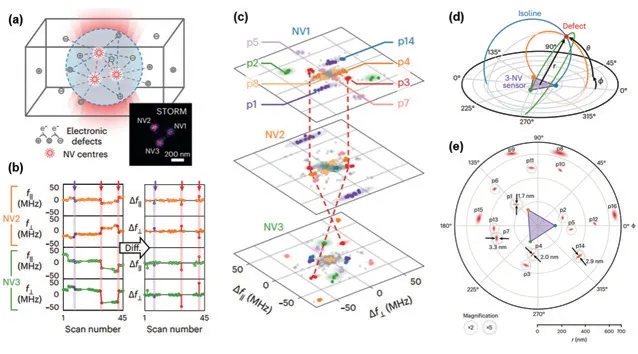
为此,本工作提出了一种新的量子传感范式,即利用多个量子传感器之间的信号关联,提升对复杂对象的解析能力和重构精度。研究团队基于自主发展的氮-空位色心制备技术,可控制备出相距约200 nm 的3 个氮-空位色心作为量子传感系统,通过对随机电场探测展示了这种新的量子传感范式。
金刚石是一种性能优异的宽禁带半导体材料,材料中点缺陷的电荷动力学会带来随机的电场噪声。本工作中,利用金刚石氮-空位色心激发态的直流斯塔克效应来实现对电场的传感。当某个点缺陷的电荷状态发生改变时,3 个氮-空位色心可以同时探测到因电荷变化而引起的电场变化。利用3 个色心间电场同时变化的关联特征,可以从杂乱无章的涨落电场中解析出每个点缺陷对应的电场,并且由于每个点缺陷和3 个氮-空位色心的相对空间位置不同,就可以根据每个氮-空位色心所感受到的电场方向和大小的不同来精确定位出点缺陷的空间位置。使用这种类似于卫星定位的量子定位技术,研究团队成功对微米范围内16 个点缺陷进行了定位,定位精度最高达到1.7 nm。基于这种关联分辨和精确定位的能力,研究团队还实现了对每个点缺陷电荷动力学的原位实时探测,为研究体材料内部点缺陷的性质提供了新的方法。
这一成果展示了基于量子技术的超高灵敏度缺陷探测,可对0.01 ppb 级别的缺陷浓度(一千亿个正常原子中出现一个缺陷)进行探测。这要比目前最灵敏方法的探测极限提升两个量级以上,有望为当前十纳米以下芯片中的缺陷检测提供一种强有力的技术手段。
沈阳自动化所在连续体机器人主动避障控制方面研究取得新进展
中国科学院沈阳自动化研究所刘浩研究员与友谊医院张忠涛教授在连续体机器人的主动避障控制方面研究取得新进展,2023 年12 月18 日,相关成果以Active collision avoidance for teleoperated multi-segment continuum robots toward minimally invasive surgery为题在The International Journal of Robotics Research线上发表。
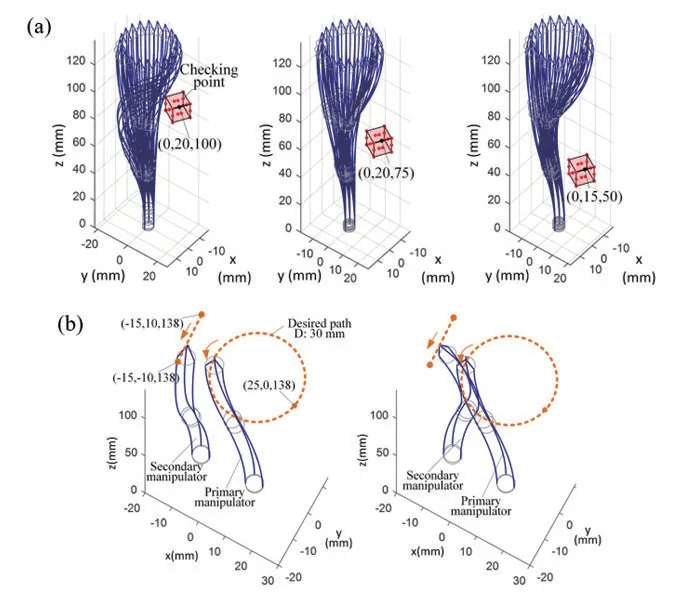
连续体机器人具有主动避障能力,作为医疗机器人在人体腔道的复杂环境中作业时,可有效避免机器人本体与人体组织或多个机器人之间的碰撞,有利于保证手术的安全与质量。然而,由于连续体机器人柔性结构与障碍环境的不规则性,表达两者之间的空间形态关系并实现主动安全交互是一个提高机器人主动避障能力的具有挑战性的问题。
为了突破上述问题,科研团队提出了一种通用的主动避障控制框架。该框架包括连续体机器人几何模型的简洁表达式,机器人与任意形状障碍物之间的碰撞检测方法,适应不同任务的避碰控制器,以及评估机器人避碰能力的评价准则。该框架为连续体机器人的安全手术提供一种有效可行的方法,并推动机器人辅助手术向更智能的方向发展。该研究得到了国家自然科学基金、国家重点研发计划、兴辽领军人才、中国科学院创新交叉团队项目的支持。
深圳先进技术研究院制备皮牛弹簧打造超灵敏机器人
中国科学院深圳先进技术研究院生物医学与健康工程研究所副研究员徐海峰团队通过自主开发的超弹磁性光刻胶,构建了弹性体4D 纳米光刻技术,制备出迄今最灵敏的人造弹簧系统——皮牛弹簧,探测灵敏度达到500 飞牛(10~15 牛),实现了皮牛力下微米级的形变。
基于此,该团队还开发出一系列具有超灵敏度的软体微米机器人,实现了高精度细胞操纵,有望为显微外科手术和靶向药物输送等精准医疗领域提供新方法。2024 年1 月3 日,该研究成果发表于《自然-纳米技术》。
研究团队构想出一种微米级别的弹性机器人用以探测更低的细胞力,并运用首次构建的弹性模量维度4D 纳米弹性体光刻策略,制备了迄今最灵敏的人造弹簧系统。
该系统具有纳米级的特征尺寸,其力感知的灵敏度可以达到500 飞牛,相当于单个细胞重力的一千分之一,并且其形变精度超过1 微米每皮牛。
这一新型皮牛弹簧支持高度自由的4D 光刻加工,可以被定制化加工成任意形状,同时完美兼容磁性光刻材料,可用于制备各类软体微米机器人和柔性微米器件。
“这项工作开辟了探索生理、病理条件下分子、细胞和组织的力化生耦合动力学原理的新途径。”中国力学学会副理事长、清华大学生物力学与医学工程研究所教授冯西桥评价说。
科研人员开发出物理智能控制的新型软体机器人
美国北卡罗来纳州立大学研究人员设计了一种新的软体机器人,它可同时进行3 种行为:向前滚动、像唱片一样旋转,以及沿着围绕中心点运行的路径移动。该设备无需人工或计算机控制即可运行,有望开发可用于导航和绘制未知环境的柔性机器人设备。2024 年1月8 日,该研究论文发表在《美国国家科学院院刊》(PNAS)上。
新的软体机器人被称为“扭曲环形机器人”,由丝带状液晶弹性体制成。这些弹性体像烤肉面条一样扭曲,然后在末端连接在一起,形成一个类似手镯的环。当机器人放置在至少55 ℃的表面上时,色带接触表面的部分会收缩,而暴露在空气中的色带部分则不会收缩。这会引起滚动运动,表面温度越高,机器人滚动得越快。
该机器人也可沿着其中心轴旋转,就像转盘上的唱片一样。当它向前移动时,会沿着围绕中心点的轨道路径移动,基本上是绕一个大圆圈移动。然而,如果它遇到边界,就会沿着边界移动。
这一机器人最大的亮点,在于它们的行为是由结构设计和材料决定的,而不是由计算机或人为干预来指导的。
因此,研究人员通过设计几何形状就可微调机器人的行为。例如,他们可通过扭转丝带来控制其旋转方向;可通过改变色带的宽度、色带中的扭曲次数等来调整速度。
在概念验证测试中,扭曲环形机器人能够遵循各种密闭空间的轮廓,可沿着边界线绘制出复杂空间轮廓,并能确定边界中的间隙或损坏。
