电容式加速度传感器下电梯制动器制停时间预测算法
2024-03-28李长江赵路宁李守贝李明明
李长江,赵路宁,李守贝,李明明
1.枣庄市特种设备检验研究院,山东枣庄 277800
2.山东省特种设备协会,山东济南 250100
3.合肥市知识产权保护中心,安徽合肥 230000
4.枣庄市特种设备协会,山东枣庄 277800
0 引言
制动器是电梯的重要组成部分,主要为电梯运行提供驱动力。当制动器制动能力不足时,将会导致电梯故障,比如电梯蹲底、电梯冲顶等。因此,一旦制动器发生故障,将会威胁到乘客生命安全。为了保证安全,电梯公司会对电梯进行定期检查,其中制停时间是评估电梯制动器性能的重要指标。目前,电梯制动器存在着巨大的运维机制漏洞,如何在安全事故发生之前对制动器制停性能预警,预测制动器制停时间,避免因电梯制动器制停故障造成电梯安全事故成为重要问题。电梯安全事故发生的原因多数是由于制动器制动功能失效引起,而制动器制动性能主要在于是否在规定的时间内完成制停操作,故对电梯制动器制停时间预测进行研究,对保证电梯制动器安全工作具有重要意义。
针对以上背景,为了提高乘客的乘坐安全性和乘坐体验,国内研究人员在电梯制动器领域展开研究。苏万斌等人[1]获取并统一归一化处理电梯制动器工作性能的数据,采用主成分分析法,获取制动器的失效率,通过贝叶斯优化的前景感知生成对抗网络(Bayesian Optimization Foreground-aware Generative Adversarial Networks,BO+ForGAN)的模型,展开分析并完成预测。姜宇迪等人[2]研究出一种长短期记忆网络自编码器(Long Short-Term Memory-Encoder-Decoder,LSTM-ED)的无监督深度迁移学习方法,通过制动器运行状态下的数据对其进行健康状态分析,利用LSTM-ED 提取器目标数据,完成对制动器在正常运行状态下的剩余生命周期预测。
由于国内关于电梯制动器制停时间预测的研究起步比较晚,相关理论还不够完善,预测技术水平相比较国外还存在较大的差距。虽然近几年电梯安全问题受到研究领域重视,但是关于制停时间预测研究比较少,导致预测方法已经长时间没有得到更新与优化。在此背景下,提出基于电容式加速度传感器的电梯制动器制停时间预测研究。该方法采用电容式加速度传感器实时采集电梯制动器的加速度数据,并通过滤波和误差补偿处理提高制停时间预测的准确性。利用牛顿第二定律结合处理后的加速度数据估算电梯制动器的制停时间。
1 电梯制动器制停过程中的加速度传感数据采集
为了获取真实的电梯制停过程中的数据样本,以进行准确制停时间预测和分析,首先需要采集制停数据。由于电梯制动器制停时间预测对数据采集要求比较高,因此采用抗电磁干扰能力较强、数据采集精度较高的型号为KHFAT-A4F8A 电容式加速度传感器作为制动器制动数据采集装置,采用闭环控制方式控制电容式加速度传感器[3]。利用电容式加速度传感器采集电梯的制停数据是基于加速度的原理。电容式加速度传感器是一种能够测量物体加速度的传感器,传感器内部含有一对金属电极,它们之间形成一个电容,当电容式加速度传感器受到加速度作用时,其内部的质量会发生相应的位移,这个位移会导致电容之间的距离发生变化,从而改变了电容的值。传感器通过测量电容值的变化来确定物体所受的加速度。当电梯制动时,传感器会感知到电梯的减速过程,即产生一个负向的加速度信号。该信号可以通过传感器内部的电路进行处理和转换,最终输出制动时的加速度数据。
将电容式加速度传感器安装在电梯中,由制动器对电梯进行制动,电梯以额定速度向上运动,运行到顶部,此时断开电梯主电源开关,电梯制动器失电,制停电梯,采用电容式加速度传感器采集电梯从制动开始到制停之间的加速度数据[4]。由下级板、中间极板以及上极板3 部分组成电容式加速度传感器数据采集电路,通过电路中间极板位置变化产生电容差,利用中间极板连接信号放大器,以制动数据输出电路信号,并在下级板上连接读卡器,读取放大电路信号[5]。电容式加速度传感器在闭环工作模式下,通过数字反馈环路输出确定电梯制动力的反馈方向,根据测量电梯位置与方向的变化,将信号反馈到电容式加速度传感器数据采集电路中的中间极板上[6],采用时序法将电容差转换为电压差,输出x,以采集制停过程中的加速度数据:
式中,x*表示电容式加速度传感器采集到的电梯制动器制动电容信号;e表示转换参数,通常情况下,该参数取值为0.01。
在数据采集过程中,电容式加速度传感器数据采集电路上的中间极板,在上极板与下级板不平衡力作用下移动,其运动方向始终指向上极板与下级板之间的平衡位置,从而获取到相应的电梯制动器制动电压信号。考虑到电容式加速度传感器采集的数据为电压信号,无法被计算机所识别和计算,因此需要再对数据进行处理,将电压形式信号转换为数字形式信号,将其发送到计算机上,用于后续预处理和分析计算。
2 传感器加速度数据的滤波及误差补偿
由于电容式加速度传感器数据采集的过程中含有较多的低频噪音,且与电梯轿厢之间的耦合为非刚体,二者会发生共振,导致高频杂波的出现,从而对电容式加速度传感器数据采集造成干扰[7-8]。为了提高电梯制动器制停时间预测的精度,需要对采集到的制动器的制动数据进行降噪处理。高通滤波是对电梯在紧急刹车时产生的高频噪声进行滤除处理,低通滤波是指去除在电梯运行时产生的低频噪音以及抑制电梯运行时产生的竖向振动噪声[9]。将高通滤波与低通滤波结合,形成带通滤波,利用带通滤波控制噪声频率分量,并通过在带通滤波器中设定频率的上限与下限,定义频率通过区间,以此滤除原始信号中的高频噪声和低频噪声,达到数据滤波的作用[10]。带通滤波器主要是利用电阻、电感和电容等构成的线路,利用其阻抗特性来达到过滤的目的[11]。
为了采集的制停数据具有可靠性和精确性,使得最终的电梯制动器制停时间预测结果更加精准,必须对采集到的电梯制动器制动加速度数据滤波预处理[12]。过滤器的阶数越高,说明其滤波性能越好,但是与之相对应的滤波电路将变得更为复杂,故采用二阶正反馈带通滤波技术,构建数据滤波的传递函数,实现数据滤波处理。电梯制动器加速度数据滤波传递函数H(s)为:
式中,B表示带宽;s表示原始数据中噪声分量;w表示电梯制动器加速度信号的中心频率。利用上述传递函数对电容式加速度传感器采集的数据进行滤波处理。
考虑到电容式加速度传感器在数据采集过程中受自身影响以及外界因素影响导致采集的制动器数据存在误差[13],从而影响制动器制停时间预测结果,因此对滤波后的制动器数据进行误差补偿处理。由于电梯制动器制停减速度信号的频率与幅值符合线性规律,故采用傅立叶分析将数据滤波处理后的电梯制动器加速度数据离散时域傅立叶变换,得到电梯制动器制停加速度信号时域、频域特征,变换后的离散时域加速度信号X(x)用公式表示为:
式中,n表示采样点数量;N表示电梯制动器加速度信号采样点总数;WN表示旋转因子[14]。通过对加速度信号变化得到加速度信号频率,获取电梯制动器加速度频率-幅值比例因子K,其计算公式为:
式中,S表示电梯制动器加速度信号幅值。利用计算得到的比例因子对制停加速度信号误差补偿,误差补偿后的加速度数据用公式表示为:
通过以上对采集到的制停数据进行滤波和误差补偿,完成对制停加速度数据预处理,为后续的电梯制动器制停时间预测提供数据支持。
3 电梯制动器制停时间估算预测方法设计
利用获取的误差补偿后的电梯制动器制停加速度数据,在电梯制动器制停的情况下,根据牛顿第二定律可以确定制动器所受到的制动力和物体运动的加速度,进而计算出电梯制动器制停时间。因此,根据牛顿第二定律计算出电梯制动器制停时间预测结果t为:
式中,g表示电梯制动器制停距离;a(t)表示电梯减速度,该值为一重要预测参数;d表示安全钳制停平均减速度。电梯制动器制停,电梯下行超速触发安全钳动作,从而产生电梯制动器制停减速度,在电梯满载的情况下电梯自由下落,安全钳制停平均减速度d为:
式中,gn表示电梯重力加速度;ϑ表示制动器倍数。
电梯制停下行过程中与缓冲器发生碰撞,此时也会产生制停减速度,根据《电梯运行安全规范》GB25459—2020 要求,电梯缓冲器产生的制停减速度不超过电梯重力加速度的0.15 倍,但是电梯在紧急制停工况下,电梯制动器制停减速度不能小于0.35 m/s2,通过以上分析可以确定,电梯制动器制停减速度取值范围为:
在合理的取值范围内确定电梯制动器制停减速度,将其代入到电梯制动器制停时间预测公式中,即可预测出电梯制动器制停时间,以此完成基于电容式加速度传感器的电梯制动器制停时间预测。
4 实验论证
4.1 实验准备与设计
鉴于上文设计的基于电容式加速度传感器的电梯制动器制停时间预测方法在实际应用中效果并未得知,因此设计对比实验。将本文设计方法设定为实验组,为了使实验数据与实验结果具有一定的说明性,选择传统的两种预测方法作为对照对象,分别为基于ForGAN 的预测方法和基于无监督迁移学习的预测方法,为了方便后续实验陈述,以下将两种方法分别用对照组1 与对照组2 表述。为了方便获取实验结果,选取Simpack 作为实验的软件环境,其是一种专业的多体动力学仿真软件,用于模拟复杂的动力学行为,且具有先进的数值计算算法和高性能计算能力,可用于验证电梯制动器制停过程的仿真研究。选择10 台电梯作为实验对象,电梯型号为AKHFA-A45F8,类型为固定导轨式,最大载重为0.56 t,控制方式为按钮控制,速度为5.45 m/min,材质为国际锰钢,动力方式为电动液压;电梯制动器型号为IATWE-4A5RF,重量为147.26 kg,电压波动为10%,绝缘等级为F,制动力矩为1 250 N,额定频率为45.62 Hz,输入功率为220 W,额定电压为380 V。实验组、对照组1 和对照组2 对电梯制动器制停时间预测的实验步骤如下:
(1)实验准备:首先确定实验需要的电梯型号、参数和制动器信息,并在10 台电梯上安装电容式加速度传感器,并记录电梯制动器的加速度数据,在Simpack 软件环境中建立电梯制动器的仿真模型。
(2)方法实施:实现所提出的基于电容式加速度传感器的电梯制动器制停时间预测方法作为实验组;实现对照组1 使用基于ForGAN 的预测方法;实现对照组2 使用基于无监督迁移学习的预测方法。
(3)实验执行:将实验组和对照组已经记录好的电梯制动器的加速度数据导入Simpack 软件环境,使用各组方法对电梯制动器的制停时间进行预测。
(4)结果评估:对于每个方法,将预测结果与实际的制停时间进行比较,计算平均百分比误差,作为衡量预测精度的指标,对实验组和对照组1、对照组2进行比较,分析其平均百分比误差的差异。
按照上文设计预测方法,实验准备了10 台电容式加速度传感器,采集电梯制动运动数据共12.62 GB,通过对数据滤波以及误差补偿,预测出电梯制动器制停时间。该10 台电梯制动器制停时间预测结果如图1所示。

从图1 可以看出,预测值与实际值接近,说明设计方法基本可以完成电梯制动器制停时间预测任务,具备一定的准确性和可靠性,通过电容式加速度传感器获取的数据能够较好地反映电梯制动器的运动状态,并且能够有效地利用这些数据进行准确制停时间预测。
4.2 实验结果与讨论
对于电梯制动器制停时间预测精度,选择平均百分比误差为指标。平均百分比误差对于预测结果中较大值和较小值的误差都会有一定程度的敏感性,特别是在电梯制动器制停时间预测中,对于预测值偏差较大的情况,能够更好地反映预测结果与实际值之间的差别。其计算公式为:
式中,TU表示预测平均百分比误差;RE表示预测值;YU表示实际值。平均百分比误差越大,则表明预测准确度越低。实验以预测数据样本信噪比水平为变量,选取0.15~15.15 dB 信噪比预测数据,利用上述公式,计算出不同信噪比水平下3 种方法预测平均百分比误差。信噪比是指信号与噪声的比值。信噪比较高,通常表示噪声相对较小,信号较为清晰,预测误差可能较小,反之较大。具体数据如表1 所示。
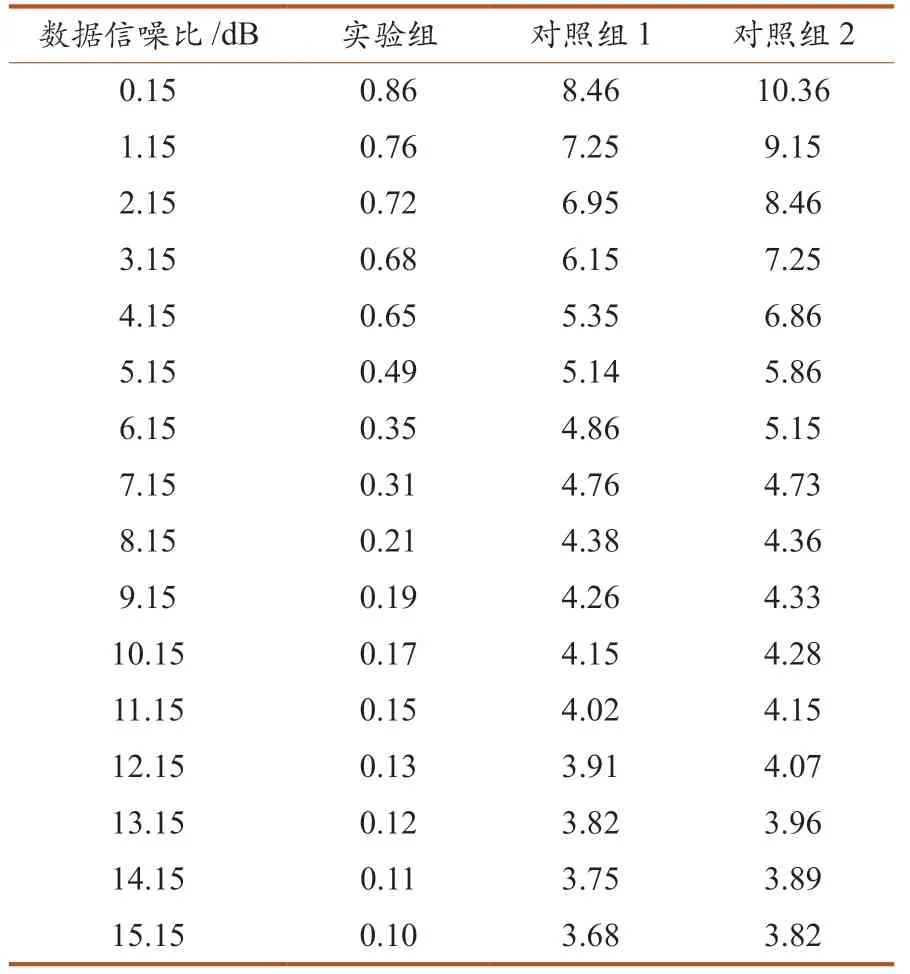
表1 3 种方法预测百分比误差对比(%)
从表1 中数据可以看出,随着信噪比的增加,3种方法的预测误差均呈现下降的趋势。实验组的预测平均百分比误差相对于对照组1 和对照组2 始终较低。当信噪比为0.15 dB 时,实验组的预测平均百分比误差仅为0.86%,远远小于对照组1 的8.46%和对照组2的10.36%。随着信噪比的提高,实验组的误差持续降低。在信噪比为15.15 dB 时,实验组的误差仅为0.10%,而对照组1 和对照组2 的误差分别为3.68%和3.82%。这表明,实验组相对于对照组在不同信噪比水平下具有更好的预测精度。高信噪比水平意味着信号相对清晰,无噪声干扰,此时实验组的预测误差更小,而对照组1 和对照组2 的误差相对较大。因此,在给定的实验条件下,可以得出,实验组的方法相对于对照组1 和对照组2 在不同信噪比水平下具有更好的预测效果。这是因为实验组采用了二阶正反馈带通滤波和傅立叶分析技术对加速度数据进行处理,消除噪声和误差对预测结果的影响,提高了预测的准确性。
由于单一的评价指标不能全面反映出方法预测性能,故选择预测消耗时间作为第二评价指标。实验共设计10 组,每组实验对电梯制动器制停时间预测3 次,取平均值作为最终耗时,耗时越少,说明方法的效率越高,性能越好。具体数据如图2 所示。

从图2 可以看出,实验组与对照组在预测效率方面表现出明显差异。实验组平均预测耗时为0.53 ms,比对照组1 快将近6 ms,比对照组2 快将近7 ms。因此,通过以上对比与统计,证明了无论是在预测精准度方面还是在预测效率方面,设计方法均表现出明显的优势,相比较两种现行方法更适用于电梯制动器制停时间预测。这是因为实验组使用电容式加速度传感器实时采集数据,具有较高的采样频率和响应速度,可以更快地获取和传输数据,从而提高预测计算的效率。
5 结束语
制停时间是电梯制动器性能评估检测的重要指标。此次针对现行方法存在的不足和缺陷,结合电容式加速度传感器在数据采集方面的优势,将其应用到电梯制动器制停时间预测中,提出了一种新思路,有效降低了电梯制动器制停时间预测误差,缩短了预测时间,提高了预测效率,为电梯制动器制停时间预测工作的开展提供了理论支撑。
同时也为基于电容式加速度传感器的电梯制动器制停时间预测方法研究提供了参考依据,具有良好的现实意义与理论价值。由于研究方法目前尚处于初步探索阶段,尚未在实际中得到大量实践与应用,还存在一些不足之处,今后会在该方面展开深层次探究。
