智能传感器网络边界全目标k 覆盖保持方法研究
2024-03-28陈侃
陈侃
福州外语外贸学院大数据学院,福建福州 350001
0 引言
智能传感器网络的应用场景通常需要对目标区域进行全面监测,如环境监测、安防监控等,以确保边界内的所有目标区域都能够被节点监测到。然而,智能传感器中的节点通常是由有限的电池供电,且部署在复杂环境中,导致其具有有限的处理能力[1]。为了最大限度地利用这些资源并延长网络的寿命,需要设计有效的覆盖策略,使得边界内的全部目标区域都能够被网络中节点覆盖,同时尽可能减少重复覆盖和冗余。因此,为了提高网络对目标区域的监测能力和数据传输的可靠性,边界全目标覆盖保持方法成为研究热点。
基于以上背景,为了提高智能传感器网络的性能和效能,并实现对目标区域全面监测和保持网络稳定的目标,国内众多专家对该领域展开大量研究。郭彩萍等人[2]通过获取传感器感知范围内的节点,构建一个感知圆,并计算节点,该节点临近节点与传感器端之间能量转换的初始时间,建立在不同时间下的节点覆盖率、覆盖面积及其概率模型。根据单一节点和整体节点范围的覆盖部分,采用串联覆盖路径连通覆盖法,完成节点的覆盖保持。董鑫等人[3]构建了一种有向视觉传感器节点模型,通过计算节点的覆盖度函数,设计节点连通保持策略,并确定节点的运行方向,利用控制器控制节点转动角度,实现网络连通,控制节点保持覆盖。
在以上两种方法的基础上,为促进目标覆盖保持方法迈入智能化,提出智能传感器网络边界全目标k覆盖保持方法。
1 边界全目标k 覆盖保持
1.1 边界节点部署
边界节点是网络中与外部环境接触最密切的节点,其位置对于维持整个无线传感网络的稳定性和完整性非常重要。为了确保边界区域得到有效的覆盖,需要先对边界节点进行部署,以达到全目标k 覆盖保持的要求。由于无线传感网络中传感器节点覆盖范围有限,因此,通过协同方式将节点覆盖在监测目标区域中。通过优化拓扑结构以增加网络性能。在网络结构优化过程中,当网络部署成功后,需要对其重构才能使数据正常传输。在无线传感网络覆盖过程中,需要运用传感器感知模型采集数据,并根据网络拓扑动态构建时的覆盖优化结果判定节点是否失效[4]。在理想状态下,为了实时观察网络状态,将目标区域定义为一个二维平面,以传感器的感知范围为目标,设定一个圆形区域,半径为R,建立布尔感知模型,具体如图1 所示。

通常情况下,通过目标点与传感器之间的距离能够获取网络状态监测数据。在监测范围中,设定平面中的任意一个目标点为(x,y),当其与传感器节点的感知距离小于布尔感知模型半径R时,将有效检测的感知度记为1。分析目标点的分布情况和网络节点的位置,计算在二维平面中的目标点被传感器节点监测到的概率,以提高网络的效能和覆盖质量,避免盲区和重叠区域的出现,从而实现节点部署。目标点被传感器节点监测到的概率公式为:
式中,h为感知距离;(xi,yi)为传感器节点。在智能传感器网络的实际感知中,如果感知距离发生改变,与传感器的距离较大时,信号会衰减,使得感知的概率下降[5]。建立感知模型能够将节点与目标之间的距离强度值转化为相应的概率值。设定传感器对目标点的置信度,并计算传感器节点感知能力随距离的变化情况。同时,在感知过程中,对于视频监控传感器来说,能够对扇形区域产生一定的感知,在网络中能够监测特定的放线信息,通过对节点动态规划达到节点的高效部署,在区域内放置多个传感器节点,通过节点之间的协作能够使得目标区域在最大程度内被感知。在无线传感网络中,如果因为某些原因导致节点失效,如节点之间的距离大于通信距离,将导致网络遭到破坏,节点成为网络中的孤立区域,使网络失去连通性,影响数据传输[6]。当节点失效,网络中会出现覆盖空洞,将改变网络拓扑结构。因此,需要对失效节点进行处理,在部署节点时需要放置多个传感器,并通过节点定位技术将传感器节点替换为失效节点,形成k条通信链路,保证网络的连贯性。将失效节点周围叶子节点更换到失效位置,能够保证网络的完整性。当目标点被监测时,需要通过节点调度动态移动到监测目标周围进行节点部署,从而实现监测数据有效传递。
1.2 边界全目标k 覆盖
边界区域通常是传感器网络与外部环境接触最密切的区域。为了确保边界区域内的全部目标得到有效的监测和保护,以提高网络对外界环境变化的感知能力,从而实现传感器节点覆盖保持,因此,研究边界全目标k 覆盖非常重要。为了网络中各节点能够更好地进行通信,根据边界节点部署结果,运用高阶泰森多边形法进行自主部署[7]。该方法可以将网络区域划分为各个子区域,并为每个子区域分配一个节点。通过在每个子区域内部署一个节点,可以最大限度地减少节点之间的通信距离,从而提高覆盖效果。
在一个k阶多边形图解中分割目标区域,生成Nk个互斥的分区,每一个分区与k个相邻节点关联,从而形成一个集合为|Nk|=k。在不同分区中存在与集合关联的传感器节点,其集合表示为Vk。将Vk与n个关联的多边形分区进行交集,得到Vk中所有边界点之间的距离。将网络进行k阶多边形分割后,需要计算节点的统治区域[8]。根据传感器感知模型采集到的数据,当网络覆盖外弧在n个统治区域中时,存在网络边界上依赖局部的一跳邻居节点,可对传感器边界节点部署提供较高的边界检测效率[9]。结合边界节点向外扩展的特性,利用获取的目标点被传感器节点监测到的概率,计算统治区域边界节点,使得传感器网络覆盖到整个目标区域中。其中,计算传感器网络中所有节点的统治区域的公式为:
式中,c为任意节点;k-1 为剩余节点。当节点之间的距离与感知距离h之间的差值小于0 时,表示节点紧密相连,并且彼此之间能够互相传递信息。在这种情况下,节点将无需再独立占领目标区域中的特定位置c点。
根据获取的统治区域,可以将其组建成为一个多边形,将该多边形的所有顶点连接起来,形成一个组合图形,以确定这个组合图形的外接圆的圆心。外接圆的圆心是统治区域组合图形的最佳选择位置,能够最大限度地满足边界全目标k 覆盖的需求。基于此,获取图形边长垂直平分线的交点。在所有的统治区域中,如果计算的距离小于圆半径,则能够得到区域中心[10],如果计算的距离较小,则将该点剔除,以此能够在k 覆盖传感器节点部署中获得最优的感知范围。在k 覆盖下,存在k个节点在感知范围内,否则传感器节点不能够实现边界全覆盖。
1.3 多目标集群分簇覆盖保持
通常情况下,节点间会由于通信发生能量消耗。在考虑网络通信质量的同时,也要确保节点能够高效地利用有限的能源资源[11]。多目标集群分簇覆盖保持可以将智能传感器网络分成多个集群,每个集群内部有特定的目标点覆盖。该方法可以提高网络覆盖效率,使边界区域中的目标点被更少的节点所监测,减少不必要的冗余覆盖。在传感器网络中,所有节点统治区域中的[0,1]区间内随机产生M个粒子,粒子的维数与簇头节点的数量相同。设置在传感器网络中,簇头个数为P,簇头节点g与其他簇头节点j之间距离满足一定关系。当两个簇头通信时,根据边界全目标k 覆盖结果,通过比较两个簇头之间的距离,判断更靠近基站的簇头g并将其加入到通信列表中。具体的表达式如式(3)所示:
式中,I(P(g),n)表示簇头节点g将相邻簇头节点n作为下一跳的簇头的通信列表。
在智能传感器网络中,为实现边界全目标k 覆盖保持,边界区域的目标点监测至关重要。由于智能传感器网络中的节点通常是由有限能源驱动的,在通信和数据处理过程十分消耗能量。通过运用分簇方式均衡处理网络能量消耗情况,可以确保网络中关键的边界节点维持足够的能量,提供稳定的监测能力,从而有效实现边界全目标k 覆盖的保持目标。因此,在网络节点通信过程中,利用得到的更靠近基站的簇头gi,运用分簇的方式均衡处理网络能量消耗情况[12],选取簇头的能耗作为构建目标函数,公式为:
式中,m为簇头节点的总数;Q(j)为每轮通信链路中第j个簇头节点的能量消耗。根据簇头与其下一跳簇头的距离,在空间中选择离散点,通过计算无线传感器网络中能覆盖到点的数目,将覆盖到的点数与空间点的比重进行计算,并运用网络覆盖模型计算网络覆盖率[13]。在每轮通信过程中,对目标矩阵K 归一化处理,避免覆盖率受到量纲差异影响,利用簇头能耗目标函数计算传感器网络各个通信方案之间的相似度大小,从而实现对目标k 覆盖保持,计算公式如式(5)所示:
式中,p-为通信方案达到负理想的距离;p*为通信方案达到理想解的距离。选择出最优通信链路,计算各节点中的能量。如果某簇内死亡节点数目达到设定条件,需要进行重新分簇来降低网络耗能,直到网络中出现簇头节点死亡,则停止算法,从而找到最优解,以增强算法的空间搜索能力,完成对目标k 覆盖保持。
2 实验分析
为了验证本文提出的智能传感器网络边界全目标k 覆盖保持方法的有效性,需要对其展开实验分析。将所提方法作为实验组,将文献[2]的随机通信时延下传感器连通覆盖保持方法作为对照1 组,将文献[3]的具有盲区的有向视觉传感器网络连通覆盖保持方法作为对照2 组。节点通常部署在目标区域的角落处,因此,外接圆的直径通常会与网络的边界相吻合。结合传感器节点的固定感知范围,在同一网络规模部署下,计算并比较传感器节点覆盖率,分析在不同覆盖节点部署算法的覆盖程度。
2.1 搭建实验环境
采用OMNeT++作为智能传感器网络边界全目标覆盖保持问题的仿真环境。该软件是一个广泛使用的开源网络仿真框架,支持多种网络模型仿真,提供强大的网络模块化建模能力,能够应用于智能传感器网络边界全目标覆盖的各种场景。仿真实验搭建环境,其中CPU 为6.8 GHz,操作系统为Windows11。在仿真实验中,按照实验要求设置一定数量的传感器节点,传感器可以覆盖的视野最大范围为2 m,传感器的视野角度或方向为pi/3,半径为R=3.5 m。初始化传感器位置,感知方向随机设定。选取半径为10 m 的圆形区域作为实验场景。将所有节点固定在实验架上,其可调节的高度范围为0.5~2 m,设置监听设备,对监测区域的网络进行安全监听,使用串口线与PC 进行交互。在复杂实验场景中,将接收节点安置在测试区域的中心,得出节点的优化部署位置。设置概率模型中参数感知半径为3 m。由于接收信号强度与实际半径有关系,所以通过观察信号强度来判断是否产生路径损耗,保证网络的连通。在实验场景中,将三维空间中链路覆盖模型的感知区域看成一个圆体,先发送一些节点部署到监测区域,当节点个数为70 个时进行实验。
2.2 结果与分析
为了验证方法对目标区域的全覆盖,采用3 种不同方法对该范围进行节点部署,实验结果如图2 所示。

由图2 实验结果可知,运用不同方法进行最大外接圆半径覆盖后,所得结果均有不同。对照1 组的区域全覆盖性能相对较差,由于节点的随机分布,可能存在一些区域没有被节点覆盖到,导致目标区域的不完全覆盖;对照2 组的区域全覆盖性能相对较好,但仍存在没有覆盖到的区域;实验组的区域全覆盖性能表现最好且最为均匀,能够实现节点的覆盖保持,覆盖率达到99%。由于本文方法考虑节点通信范围和能量消耗等因素,选择了最佳的节点部署位置,使目标区域得到了最大程度的覆盖。由此说明,运用本文覆盖保持方法能够提升监测区域的覆盖程度,增加活跃节点的数量。
为了进一步研究方法的覆盖效率,采用以上3 种方法完成目标区域的全覆盖,选取时间为实验指标,时间消耗越少,说明方法的覆盖效率越高,记录3 种方法完成目标区域全覆盖的时间,如表1 所示。
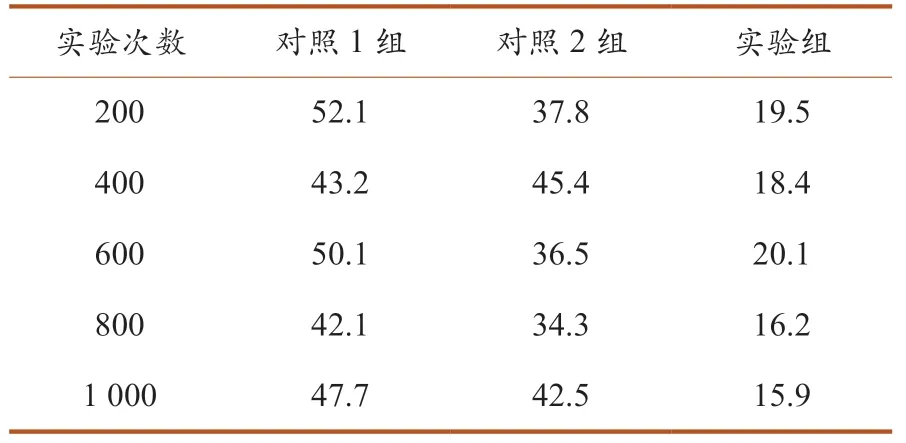
表1 3 种方法的目标区域全覆盖时间对比(时间/ms)
分析表1 可知,实验组完成目标区域全覆盖的时间最少,在实验覆盖1 000 次时,仅耗时15.9 ms,相比于其他两组,分别减少了31.8 ms 与26.6 ms,从而说明,本文方法的全覆盖效率最高,可以实现对边界区域的目标进行全面、准确的监测。对于边界防护、安全监控等领域具有重要意义,能够提高对潜在威胁和异常情况的及时感知和响应能力。
3 结束语
本次从k 覆盖保持问题入手,结合智能传感器网络,探究了智能传感器网络边界全目标k 覆盖保持方法。通过建立网络传感模型,得到传感器节点与目标节点之间的从属关系,使得通信协议具有可行性。但方法中还存在一些不足之处,例如调整活跃节点位置分布问题、监测区域划分问题、局部解集迭代问题等。通过模型的重建,有效提高方法的准确率,使得识别与覆盖保持在实时性问题上有了突破,完成对局部最优解集合的优化。同时,合理增加传感器节点,获得准确定位,寻找最佳空洞修复位置,满足算法对于定位修复的需求。在传感器节点能量转换过程中,通过算法不断优化,达到网络能量均衡的目的,对监测区域能够有效覆盖。在对多目标节点进行覆盖过程中,应用k 覆盖保持方法可以实现更有效、更准确的覆盖保持。
