基于SolidWorks 的鲜枣采摘末端执行器设计与运动仿真*
2024-03-22赵华民刘凯鑫焦海峰许德芳
赵华民 ,刘凯鑫 ,王 鑫 ,焦海峰 ,许德芳
(1.山西农业大学农业工程学院,山西 晋中 030801;2.吕梁学院矿业工程系,山西 吕梁 033001)
随着科学技术的进步和机器人技术的发展,农业机器人成为学者的研究热点。农业机器人的发展是农业智能化的重要标志[1],对提升农业生产效率、解决人口老龄化问题具有重要意义。鲜枣采摘目前依旧采用人工方式,费时费力,因此对采摘自动化的需求十分迫切。末端执行器是机器人的执行机构,目前已有学者对农业采摘用末端执行器进行了研究,陈真真[2]、李宁[3]研究了苹果采摘用末端执行器。朱容芳等[4]基于UG 软件研究了苹果采摘机械臂及末端执行器。周科宏[5]、杨乐平等[6]研究了番茄采摘末端执行器。李秉旭[7]研究了三爪气动式采摘用末端执行器。孙金风等[8]研究了水果被动抓取末端执行器。李小平[9]进行了圣女果采摘机器人末端执行器的结构设计与仿真分析。以上末端执行器的研究和设计为本末端执行器的研究提供了理论和方法借鉴,但是目前鲜枣采摘专用末端执行器的研究还较少。因此,本课题针对温室鲜枣的采摘,研究设计了一种鲜枣采摘专用末端执行器。
1 鲜枣采摘末端执行器工作原理
通过分析鲜枣采摘的过程,降低采摘过程中对鲜枣的损伤,并减少采摘过程中树枝摇晃带来的同根上面的鲜枣脱落,设计了鲜枣采摘末端执行器装置,其结构如图1 所示。该鲜枣采摘末端执行器由电机、联轴器、丝杆、光轴、夹爪、丝杆螺母、齿轮、齿条、吸盘、驱动齿轮、相机等零部件组成。该末端执行器选择电机作为驱动装置,通过联轴器将电机动力传递至丝杆,两根丝杆螺纹方向相反,实现夹爪的相向运动,为了提高夹爪运行过程中的稳定性,在其后方安装有一根光轴,使每个夹爪都能实现两根轴一起固定;通过电机驱动齿轮旋转,齿轮齿条啮合驱动吸盘做往复移动,当夹爪机构将鲜枣夹紧后,吸盘伸出将鲜枣吸住后再放至指定位置;通过驱动齿轮将电机的转速降低后再驱动传动轴转动,传动轴一端安装有扫描相机,相机能在一定角度内往复旋转并将影像回传至控制系统。在上述机构的相互配合下实现鲜枣的采摘。

图1 鲜枣采摘末端执行器结构
2 总体方案设计
通过鲜枣采摘末端执行器结构特点以及工作原理分析,可以将其结构分为动力机构、夹爪机构、吸盘机构、相机扫描机构和机架五个部分。鲜枣采摘末端执行器动力机构,选用电机作为动力源,电机驱动驱力大且结构紧凑,成本相对较低,能够使末端执行器操作灵活。夹爪机构的作用就是在不损伤采摘对象的前提下夹持住对象,减少吸盘机构采摘时枝条的震动,造成采摘目标枣附近的成熟枣脱落。吸盘机构,通过电机驱动齿轮旋转,齿轮齿条啮合驱动吸盘做往复移动,当夹爪机构将鲜枣夹紧后,吸盘伸出将鲜枣吸住后再放至指定位置。相机扫描机构,通过电机带动扫描相机在一定角度内往复旋转并将影像回传至控制系统。机架各部分采用焊接固定,并提供各个零件的安装位置,保证所有零件的运行稳定性。
2.1 夹爪机构设计
本末端执行器夹爪机构主要由电机、联轴器、左旋丝杆、右旋丝杆、光轴、夹爪、丝杆螺母和直线轴承等组成,如图2所示。
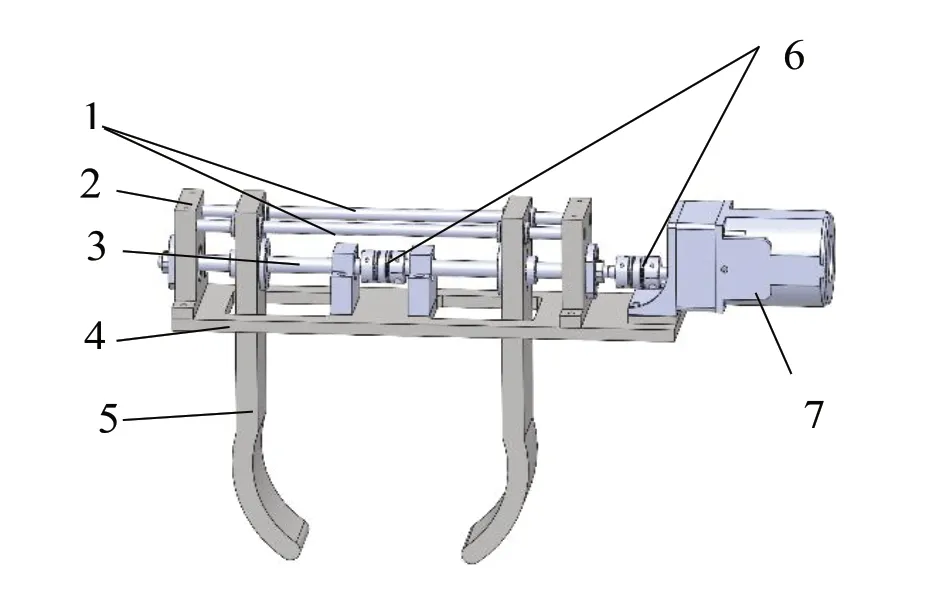
图2 末端执行器夹爪机构
夹爪通过电机驱动,电机的选型通常要考虑的因素包括载荷大小、功率大小、安装位置、方式和转速等[10]。首先进行电机功率计算。设计执行器两夹爪相向运动的额定速度为0.1 m/s,夹爪机构最大需负载50 g 的质量,计算夹爪机构在正常工况下所需功率大小P0=0.005 W。根据两夹爪相向运动的速度计算所需电机转速n=60v/πd=159.24 r/min,传动效率P=0.005 W,计算夹爪机构扭矩T=9 550P/n=0.3 N·m,综合各项因素,最终选用57BYG250H 型电机。
根据传动方案、空间大小等因素,设计丝杆采用不锈钢材质,导程5 mm,丝杆直径12 mm。通过计算其转速和最大载荷,得出材质和尺寸符合稳定运行的要求。
2.2 末端执行器吸盘机构设计
吸盘机构主要由电机、齿轮、齿条、吸盘安装块和吸盘等组成,其作用是通过电机驱动齿轮旋转,齿轮齿条啮合驱动吸盘做往复移动,吸盘机构如图3所示。
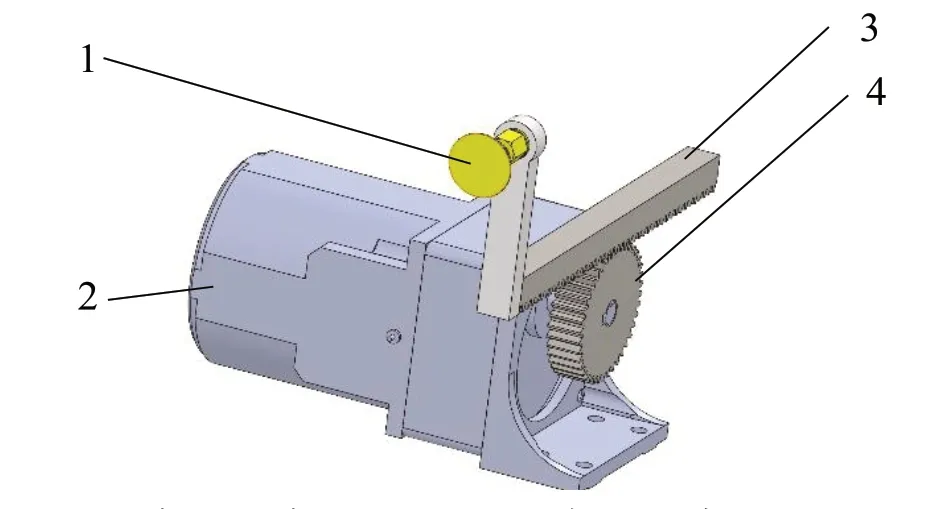
图3 鲜枣采摘末端执行器吸盘机构
根据上文电机功率计算过程,计算功率、转速、扭矩等参数,最终选择电机型号同样为57BYG250H。
齿轮齿条的选型计算。根据设计需要,取模数m=1.5,小齿轮齿数取40,查阅机械设计手册,计算得到齿轮分度圆直径为40 mm,齿条齿根高为2.22 mm,中心距30.63 mm,齿条长度为100 mm,齿数为42。
2.3 末端执行器相机扫描机构设计
相机扫描机构主要由电机、驱动齿轮、传动轴、轴承和相机等组成,如图4 所示。经计算,其驱动电机型号选择57BYG250H。

图4 鲜枣采摘末端执行器相机扫描机构
相机扫描机构选择直齿圆柱齿轮作为躯体转动的传动机构。齿轮的材料采用45 钢材质,硬度可以达到240 HBS,并且其接触疲劳极限为σHlim2=550 MPa,同时齿轮精度为7 级。根据减速需求,将小齿轮齿数定为z1=30;按照工作需求,传动比i=1.65,则能够计算出大齿轮齿数z2=49.5,将其圆整为50。
应力循环次数N1=9.6×104,N2=N1÷i=5.82×104,通过查阅相关资料,可得接触疲劳寿命系数KHN1=0.9,KHN2=0.95,由此计算得到其接触疲劳许用应力。根据上述已知,计算大小齿轮接触疲劳许用应力[σH]1=495 MPa,[σH]2=522.5 MPa,由其计算得到小齿轮分度圆直径d1t=36.9 mm,进而算出圆周速v=0.386 m/s。根据相关资料可得,载荷系数K=1.92。根据实际载荷系数,对分度圆直径进行校正,让载荷系数Kt=KA=1.1,分度圆直径如式(1)所示:
将计算结果圆整为d1=45 mm。然后根据齿轮各参数间的关系,在满足齿轮的强度要求的前提下,设计齿轮相关参数,如表1所示。

表1 齿轮参数表
3 鲜枣采摘末端执行器的运动学仿真
3.1 仿真软件设置
为保证末端执行器运行平稳无干涉,将所有零件在SolidWorks 中进行装配后,进行运动学仿真,步骤如下。
1)在组合体界面,点击运动算例,在运动算例左上角选择“Motion分析”,如图5 所示。
2)然后选择旋转马达,在软件中设置好马达位置和马达方向,选择相对于马达移动的零部件,选择数据点,如图6 所示。

图6 选择马达位置与马达方向
3)数据点参数编辑如图6 所示,编辑完成后右下角点击确定,马达左上角打钩,完成吸盘运动编辑。
4)重复以上增加旋转马达的相关步骤,增加夹爪运动、马达位置等相关设定。仿真时间设置10 s,点击左侧计算进行仿真计算。计算完后,点击结果和图解选项选择位移,速度选择线性速度,方向为Z分量,选择夹爪顶点,生成运动曲线。
3.2 运动仿真结果
在SolidWorks 左下角结果中右击图解。选择显示图表,显示线性速度、线性位移曲线,如图7、图8所示。
将设计的采摘末端执行器导入运动仿真分析软件中,绘制末端执行器在运行过程中的速度和位移曲线,曲线平滑无明显冲击,表明末端执行器运行平稳、零件无干涉。
4 结论
本文以鲜枣采摘末端执行器装置为研究对象,采用SolidWorks 软件对末端执行器进行零件建模和仿真,并结合机械设计知识,对各零件尺寸和参数进行计算,各零件配合良好,材料选择满足强度要求。最后利用SolidWorks运动仿真分析软件对末端执行器进行运动仿真,结果表明,末端执行器能够顺利进行开合和抓取,并且运动曲线平滑,表明各部件之间运转正常,零件无干涉现象。本末端执行器的研究为鲜枣采摘机器人的研发提供了理论借鉴。

图7 末端执行器在Z方向的线性速度曲线
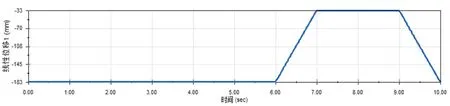
图8 末端执行器在Z方向的线性位移曲线
