弹体侵彻过程主动磁探测识别方法
2024-03-11李长生
赵 静,李长生
(南京理工大学智能弹药技术国防重点学科实验室,江苏 南京 210094)
0 引言
在现代战争中,指挥中心、武器库、通信站等目标逐渐由地上转为地下,隐蔽性越来越强,其防御能力也越来越强[1],为了打击这些高价值目标,硬目标侵彻武器应运而生。硬目标侵彻引信可控制弹药按照设定的起爆方式、起爆时机使战斗部在目标内部最佳位置起爆,其毁伤能力较常规武器可提高几十倍[2]。20世纪90年代前,国内的侵彻引信大多数为固定延时引信,从90年代后才开始了对自调延期和可编程引信的研制,近年来又开始研究可计层、计空穴的硬目标灵巧引信[3]。
侵彻武器打击目标常见为多层或厚目标,利用引信部位感知到的过载加速度信号来实时识别弹丸穿靶特征,可实现对多层或厚目标的精确打击。计层起爆功能的核心技术是目标层数识别算法,而现有的目标识别算法完全依靠弹体侵彻每层靶板时产生过载加速度信号进行计算。而在实际侵彻过程中,由于弹体自身结构响应会产生大量的高频振荡信号并与引信部位的过载加速度信号相叠加致使穿层信号被淹没,无法准确识别目标层数,难以进行精确打击[4],并且当侵彻速度越快、弹体长径比越大、靶板间距越小时,信号振荡现象越严重[5]。针对侵彻多层目标时的过载信号振荡问题,有学者提出小波分析[6]、短时傅里叶变换[7]、动态阈值[8]、盒差分滤波[9]等方法对过载信号进行处理;但是信号处理过程中参数设定均依赖于特定条件,在侵彻复杂多类目标时适应性较差,难以成为解决过载信号振荡的有效方法[3]。
磁探测是通过感知磁场的变化来判断是否有磁性物体靠近,因其识别能力强、定位精度高、反应迅速、隐蔽性好等优点被广泛应用于军事领域[10]。目前,磁探测主要应用于如坦克等铁磁性装甲目标识别[11-12]、反潜探测[13]、弹道修正[14]等。近几年才开始有学者将磁探测用于解决侵彻问题。文献[15]利用通电线圈在靶板内部建立了调制磁场,利用磁场的变化规律来表征弹丸的侵彻深度。目前基于磁探测的侵彻过程识别方法还处于初级阶段,主要研究方向可分为被动磁探测与主动磁探测。文献[4]提出基于地磁信号的磁异探测侵彻计层方法,通过在引信内部放置磁传感器探测侵彻过程中引信内地磁信号的变化,属于无源被动探测,所需的系统简单,但会受不同地理位置地磁场方向、弹体着角、穿靶姿态等影响,引起磁传感器探测信号变化,对于后期信号处理较为麻烦。相较于利用地磁场的被动探测,文献[16]提出在引信内安装磁钢产生磁场的主动磁探测方法,利用磁传感器感知侵彻过程钢筋等铁磁性物质与磁块激发磁场耦合作用引起的引信内磁信号变化以此实现计层,论证了基于主动磁探测的磁信号计层可行性。由于远程制导弹一般采用攻顶贯穿打击方式,炮射攻坚弹采用平射或曲射,采用被动磁探测会增大后续信号处理、识别难度,而主动磁探测方法因磁块和传感器相对放置位置和方向可以人工设定,受穿靶工况影响较小,便于后续信号处理。
双磁钢激发磁场的主动磁探测方法[16],由于双磁钢体积大、安装一致性差,且在侵彻过程中应力波会引起磁块间相对位置微动,而这种微动所引起的磁场变化可能会比靶板中钢筋引起的更强,给侵彻过程识别带来不利影响。本文在其基础上进行了改进,设计了一种基于单个磁块产生磁场的主动磁探测侵彻过程识别方案,并分析了不同侵彻工况下引信内磁场变化规律。
1 主动磁探测原理
硬目标侵彻武器打击的目标一般为钢筋混凝土结构,其中的钢筋属于导磁性材料,侵彻战斗部的弹体外壳一般为高强度钢材料,引信位于战斗部尾部,在引信内尾部放置磁块产生磁场,弹体的铁磁性外壳会对内部磁信号产生屏蔽作用,而引信管壳和底螺一般采用硬质铝或钛合金,所以在战斗部尾部会有漏磁现象。当弹体侵彻钢筋混凝土目标时,导磁性材料的钢筋会对战斗部周围的磁场产生影响,尤其在战斗部尾部影响更为明显,所以可在引信内部敏感位置放置磁传感器检测弹体穿靶过程中的磁信号变化情况,并以此对侵彻过程进行识别,如图1所示。
图1 主动磁探测原理示意图Fig.1 Schematic diagram of active magneticsounding principle
2 主动磁探测侵彻过程识别方案建模
本文提出一种在侵彻战斗部内部敏感位置放置磁块和磁传感器来对不同工况侵彻过程进行识别的方法,利用COMSOL有限元分析软件对磁探测战斗部和钢筋混凝土靶板进行建模。
2.1 钢筋混凝土靶建模
建立钢筋混凝土靶板模型如图2所示,靶板为1.5 m×1.5 m×0.3 m的长方体。配筋方式如图3,内部在两个垂直方向上都有配筋形成双层钢筋网,钢筋直径20 mm,间距为150 mm,距离靶板边界两侧距离为75 mm处开始配有钢筋,两层钢筋网间距为150 mm。混凝土由水泥、沙、石组成,不具有磁性,其相对磁导率设为1。钢筋的相对磁导率设为700。
图2 钢筋混凝土靶板模型Fig.2 Reinforced concrete target plate model
图3 钢筋网钢筋分布图Fig.3 Steel mesh reinforcement distribution map
由于磁块和磁传感器安置于引信内部,位于战斗部尾部,而在实际侵彻过程中,当弹体侵彻钢筋混凝土靶板时,由于弹头的侵彻作用会使靶板留下孔洞,而磁传感器感知的磁场为靶板被弹头侵彻过后形成孔洞后的磁场大小,所以需要对靶板进行提前开坑处理。根据仿真弹体穿靶后留下孔洞大小对靶板的钢筋混凝土和内部钢筋网分别进行开孔,孔洞半径大小为160 mm,开坑后的靶板模型如图4所示。

图4 开坑后的钢筋混凝土靶板模型Fig.4 Reinforced concrete target plate model after pit opening
2.2 主动磁探测侵彻战斗部建模
建立侵彻战斗部几何模型如图5所示,战斗部主要由外部壳体、炸药、底螺、引信几部分构成,引信安装在战斗部尾部如图6所示,其中弹体长度为1 500 mm,直径300 mm,弹体外壳厚度为20 mm,外壳材料为高强度合金钢,相对磁导率为200。引信管壳近似为空心圆柱,长度200 mm,直径为150 mm,壳体厚度为5 mm,底螺为厚度30 mm,直径160 mm的圆柱体,引信壳体为硬质铝,底螺为钛合金,皆不具有磁性,相对磁导率都设置为1。

图5 战斗部几何模型Fig.5 Warhead geometry model

图6 战斗部模型示意图Fig.6 Warhead model diagram
磁块与磁传感器安装于引信内部。为减少磁块间及磁块与传感器之间的相对震动,采用单个磁块产生磁场,磁块的尺寸越大在侵彻过程中所受到的冲击力越大,故磁块采用半径为3 mm,厚度为2 mm的薄圆柱体磁钢。磁钢材料选用钕铁硼N35磁铁,其最大磁能积为35 MGOe,剩余磁通方向为Z轴正方向。
根据以上设置的仿真参数,利用COMSOL分析软件的“磁场,无电流”模块对战斗部及引信内部磁块产生的磁场分布情况进行仿真。设置弹体周围半径为7 m的球形空气分析域,并设置其为无限元域,模拟实际弹体侵彻环境。
仿真得到y平面内弹体磁场分布和弹体内部磁块穿过钢筋混凝土靶板时弹体-靶板耦合情况下磁场分布图分别如图7所示。可以看出由于高磁导率的战斗部外壳对磁力线的聚磁效应,使得战斗部外壳在前方和侧方对内部磁块产生的磁场形成了屏蔽作用,使得在战斗部前方和侧方漏磁现象较微弱,而在战斗部尾部,底螺为钛合金,相当于空气,无任何屏蔽作用,大部分磁力线由尾部流出,使得战斗部对尾部磁场变化较为敏感。如图7(b)所示,当钢筋混凝土靶板经由战斗部尾部时,在弹体-靶板耦合作用下,会使引信内产生较强的磁场变化。
图7 弹体-钢筋混凝土靶板耦合下引信磁场分布变化图Fig.7 Fuze magnetic field distribution map under projectile-reinforced concrete target coupling
2.3 确定磁块与磁传感器放置方案
磁块与磁传感器放置的相对位置的不同,对于磁场变化的敏感度也不同,需要对不同放置方案的引信内磁场变化进行仿真分析。建立弹体侵彻一层钢筋混凝土靶板模型如图8所示,将靶板放置于距弹尾部2 m处。

图8 弹体侵彻一层钢筋混凝土靶板模型Fig.8 Model of projectile penetrating a layer of reinforced concrete target plate
将磁传感器放置位置记为点N,以点N位置处磁场强度变化代替磁传感器对磁场变化的探测,通过在引信内多个位置多次仿真发现,将磁块置于弹体尾部时,漏磁较强,对钢筋扰动更敏感,故将磁块放置于距离引信尾部15 mm处。当传感器位置位于磁块上下侧时,由于引信内空间限制,探测点距离磁块过近,磁场波动较大,无法探测出有效穿靶特征,放置在探测点位置右侧与磁块相距130 mm以内时,同样无法获取穿层时有效脉冲信号特征,故将点N置于引信轴线上距磁块135,155,175 mm处,如图9所示,设置侵彻速度为1 km/s,得到的仿真结果如图10所示。

图9 引信内磁块及探测点N放置方案示意图Fig.9 Schematic diagram of magnetic block and detection point N placement scheme in fuze

图10 点N处侵彻过程磁场强度变化Fig.10 The change of magnetic field intensity during penetration at point N
可以看出三种情况下点N位置处感知到的磁场变化趋势一致,点N位于距离磁块135,155,175 mm三种情况下产生的脉冲高度分别为0.002,0.001 7,0.001 2 μT。随着磁块与磁传感器之间距离的增加,磁场强度大小虽会减弱,穿靶过程中磁场变化产生的脉冲高度减小,但信号振荡现象也会同步减弱,变化更为平稳,更利于脉冲信号识别。综合考虑后,所有仿真都将磁传感器位置放置于距离磁块155 mm处。
为了分析磁块的尺寸对其所激发磁场的磁感应强度大小的影响,分别对不同尺寸磁块的主动磁探测侵彻过程进行仿真,仿真结果如表1所示。

表1 不同磁块尺寸下的侵彻过程磁响应脉冲高度Tab.1 Magnetic response pulse height of penetration process under different magnetic block sizes
可以看出磁块的尺寸越大,激发的磁场越强,在侵彻过程中产生的脉冲高度越大。但是由于侵彻过程需承受高过载,所以体积、质量不能太大,否则磁块容易碎裂,并对电路板及引信其他零部件造成损坏。综合考虑,选择半径3 mm,厚度2 mm磁块。
3 不同侵彻工况仿真结果及分析
3.1 正侵彻仿真结果及分析
由于在现实作战环境中,侵彻弹打击目标结构复杂,所以需要对不同工况下侵彻过程磁信号探测进行仿真分析。常见打击目标多为多层目标或厚目标。
3.1.1正侵彻多层靶磁信号特征分析
基于以上弹体侵彻一层钢筋混凝土靶板模型,建立弹体侵彻三层靶模型,每层靶板间距3 m,划分网格如图11所示。

图11 弹体侵彻三层钢筋混凝土靶板模型Fig.11 Model of projectile penetrating three-layer reinforced concrete target plate
利用“稳态”研究模块中“参数化扫描”方式对弹体侵彻过程进行求解,步长50 mm得到弹体侵彻三层钢筋混凝土靶板时点N处磁信号变化情况如图12所示。可以看出当弹体侵彻多层靶板时在距离第一层靶板约0.5 m处,在铁磁性钢筋的聚磁作用下,钢筋对引信内部磁钢产生的磁场开始产生影响,点N处感知的磁场强度开始减小,直至磁块位置经过两层钢筋网之间时如图中虚线处位置,点N处磁场强度达到最小,脉冲高度约0.001 7 μT。弹体继续向前运动远离靶板,钢筋对引信内部磁场屏蔽作用减弱,点N处磁场强度逐渐恢复增大,直至弹体尾部穿出第一层靶板,点N处磁场强度恢复至初始状态。侵彻第二层与第三层靶板时磁场变化情况与侵彻第一层靶板时一致,三层靶板对应三个尖峰脉冲信号,表明了主动磁探测对侵彻多层靶板时计层的可行性。
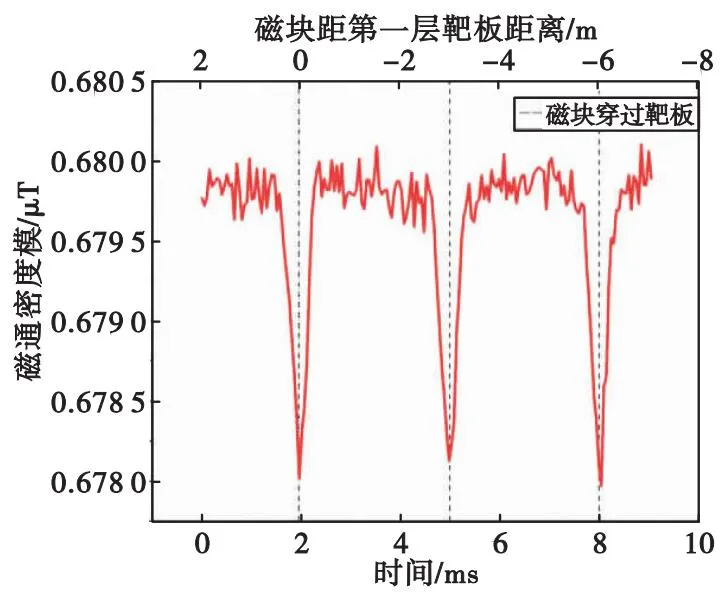
图12 弹体侵彻三层钢筋混凝土靶板点N处磁场强度变化Fig.12 Change of magnetic field intensity at N point of three-layer reinforced concrete target plate penetrated by projectiles
3.1.2正侵彻1 m厚靶磁信号特征分析
建立弹体侵彻1 m钢筋混凝土厚靶模型,内部6层钢筋网,每层钢筋网间距150 mm,距离靶板边界125 mm处开始配筋,并同样进行开坑处理。模型如图13所示。对弹体侵彻1 m厚靶过程中点N处磁场强度变化进行仿真分析,结果如图14所示。

图13 弹体侵彻1 m厚钢筋混凝土靶板模型Fig.13 Model of projectile penetrating 1 m thick reinforced concrete target plate
在弹尾距离靶板0.5 m处,靶板中的铁磁性钢筋开始对引信内磁信号产生影响,点N处感知的磁场强度开始减小,当弹尾穿入第一层靶板钢筋时,点N处磁场强度达到最低,脉冲信号变化强度为0.002 2 μT,弹尾继续在靶板中穿行,点N处磁场强度一直处于磁屏蔽状态,当弹尾穿行至靶板后半部分时,点N处磁场强度开始恢复,当弹尾完全穿出靶板并远离靶板0.5 m时,靶板对弹体引信磁场影响消失,点N处磁场强度恢复至初始状态。
3.2 斜侵彻仿真结果及分析
在实际侵彻过程中,通常情况下弹体并不会垂直入靶,弹体穿入钢筋混凝土靶板时会与靶板之间存在一定的倾斜角度,所以需要对斜侵彻模型进行联合仿真。为了简化模型与运算,在模型建立时将靶板倾斜放置,同样进行开孔处理,开孔形状及大小按照侵彻实际穿靶路径开孔。
3.2.1斜侵彻三层钢筋混凝土靶板磁信号特征分析
建立弹体斜侵彻三层钢筋混凝土靶板模型如图15所示。侵角分别为10°和20°,仿真结果如图16所示。
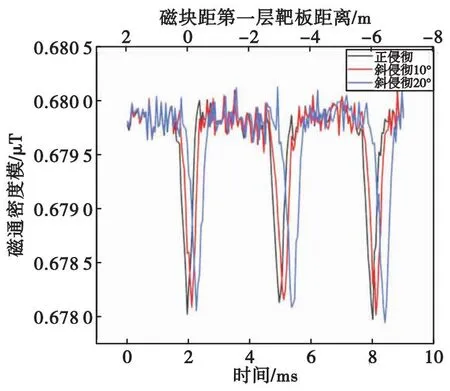
图16 正侵彻与斜侵彻不同角度磁场强度变化情况对比Fig.16 Comparison of magnetic field intensity changes at different angles of positive invasion and oblique invasion
从图16可以看出,斜侵彻与正侵彻时磁场强度变化趋势一致,但由于在斜侵彻时,弹体侵彻钢筋混凝土靶板着靶点相对正侵彻滞后,故斜侵彻较正侵彻磁信号变化滞后,角度倾斜越大,滞后越明显。穿靶过程中产生的脉冲高度并无明显变化,表明了主动磁探测方法应用于计层不受限于侵彻角度的适用性。
3.2.2斜侵彻1 m厚靶磁信号特征分析
建立弹体斜侵彻1 m厚靶模型如图17所示。侵彻角分别为10°和20°,仿真结果如图18所示。
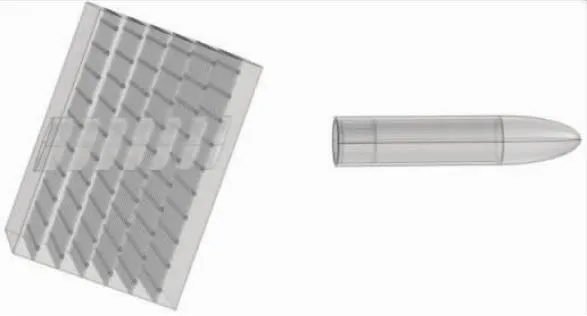
图17 斜侵彻1 m厚靶仿真模型Fig.17 Simulation model of oblique penetrating 1 m thick target

图18 正侵彻与斜侵彻不同角度磁场强度变化情况对比Fig.18 Comparison of magnetic field intensity changes at different angles of positive invasion and oblique invasion
从图18可以看出,在侵彻1 m厚靶时,斜侵彻与正侵彻时磁场强度变化趋势仍然一致,由于斜侵彻时相较于正侵彻着靶点的滞后,斜侵彻时磁信号较正侵彻也相对滞后,斜侵彻角度越大,滞后现象越明显。穿靶过程中产生的脉冲高度仍无明显变化,表明了主动磁探测方法对斜侵彻厚靶也同样适用。
对于磁响应信号检测方案拟采用高旋弹药引信地磁计转数检测方案[17],即利用线圈封装在引信内,在侵彻过程中绕轴线旋转切割磁力线产生感应电动势以反映磁感应强度的变化,多层仿真信号变化强度为1.7 nT,脉宽0.6 ms;厚靶仿真信号变化强度为2.2 nT,脉宽1.65 ms。采用二级放大电路可以检测出侵彻过程中磁场的变化。
4 结论
本文提出基于单个磁块激发磁场的主动磁探测侵彻过程识别方法,并通过仿真分析了磁块与磁传感器放置位置对主动磁探测识别方法的影响,确定了磁块与磁传感器之间的放置方案。对弹体侵彻三层钢筋混凝土靶和厚靶的侵彻过程进行仿真分析,并探讨侵彻角度对不同工况侵彻过程识别的影响,得到如下主要结论:
1) 磁传感器在引信内放置位置距离磁块越远,信号振荡效果越弱,磁场强度变化越平稳,越利于侵彻过程识别。
2) 当弹尾穿入靶板时,由于钢筋网的磁屏蔽效应,在穿过钢筋网时会产生向下的负脉冲,穿出靶板后恢复至侵彻前初始状态。论证了主动磁探测方法用于侵彻多层靶板和厚靶的可行性。
3) 在斜侵多层靶和厚靶时,由于弹体着靶点相对正侵后移,引信内磁信号变化也相对正侵彻滞后。侵彻角度越大,滞后现象越明显,侵彻角度对斜侵彻穿靶过程中产生的磁信号脉冲高度无明显影响。
本文提出了基于单个磁块激发磁场的主动磁探测识别方法,但产生的脉冲磁信号强度较小,后续可通过优化弹体模型、磁块模型、磁块与传感器相对放置位置方案等,进一步提高穿靶过程磁响应变化程度,以减小检测难度。
