养殖工船作业型水下机器人结构设计与研究
2024-03-06张佳奇谢永和李德堂高炜鹏王云杰洪永强
张佳奇,谢永和,李德堂,高炜鹏,陈 卿,王 君,王云杰,洪永强
1. 浙江海洋大学 a. 海洋工程装备学院,b. 船舶与海运学院,浙江 舟山316022
2. 中国水产科学研究院渔业机械仪器研究所,上海 200092
占地球表面积71% 的海洋蕴藏着丰富的生物、矿物和能源等资源,是人类繁衍生息和持续发展的重要基础[1-2]。我国是海洋大国,丰富的海洋资源为水产养殖提供了天然的资源基础[3]。树立大食物观,建设海洋牧场,是推进我国粮食安全战略的重要保障。近年来,我国重视发展深远海绿色养殖,鼓励深远海大型智能化养殖平台建设,使深远海养殖逐渐朝机械化、自动化、信息化方向发展[4-5]。其中,最具代表性的是养殖工船养殖装备的设计与研发。养殖舱内的水质检测是养殖工船作业的关键环节。水质环境中温度、pH、溶解氧(DO)、氨氮等是影响鱼类生长的重要因素[6-8],实时水质监测可控制养殖舱的水环境,降低水产养殖风险,提高养殖效益。
水下机器人又称无人遥控潜水器,是一种在水下作业的机器人,它可在常规技术不能到达的深度或区域进行综合考察和研究,能自主完成多种作业使命,成为探索、开发和利用海洋的重要手段之一[9-10]。目前,水下机器人已应用于多场景海洋作业中,如水下矿物、矿石和水下考古观测[11],海底电缆铺设[12],石油和天然气工业[13],在军事、渔业等领域也占据举足轻重的地位[14-16]。在水产养殖中,利用水下机器人进行水质监测,可明显提升监测的灵活性、效率和范围。王懿偲等[17]设计了一款监测水质与鱼群活动的机械鱼机器人,搭建了机器鱼三维路径跟踪控制系统和误差模型,以及控制精度高和鲁棒性强的模糊滑模控制器,但鉴于实际试验环境中干扰更加复杂,需进一步优化算法。刘宁等[18]开发了一款用于定期水质监测的新型蛇形机器人,采用仿生蛇形和沉浮结构设计,分析和模拟了蛇形机器人的稳定性,为水下机器人的结构设计提供了全新的思路,但其无法满足定点悬停采样以及实时监测。李翔飞和戴逸飞[19]构建了一款用于监测水下环境的六足水下机器人,其控制系统使用Python 程序对步态进行控制,采用仿生结构将水底行走与水中游动相结合,可代替人工水下作业,但其作业深度受限。Ravalli 等[20]开发了一种用于水质监测和预警的多传感器仿生鱼机器人,在结构上将pH 传感器与改良后的聚苯胺传感器同水下机器人相结合,将采集的信号转换为电子信号控制水下机器人,利用多传感器平台对环境中的氢离子 (H+) 浓度进行检测,但检测的参数较少。Jo 等[21]提出了一种新的、完全开源、低成本、小型无人水面飞行器 (Unmanned Surface Vessel, USV),用于实时测量近地表水质,USV 设计的硬件和软件均为开源,开发Android 程序通过蓝牙控制USV,可实现自主导航并显示传感器和GPS 数据,但其使用场景受限。Huang 等[22]设计了一种用于水产养殖水质检测的机器人,采用开放式框架结构设计、三螺旋桨推进方式,机器人配备水质检测模块,采集定点位置的淡水水温、pH、DO 等参数,但实际作业中无法实现实时监测。
目前,水质检测技术正向多元化、智能化、信息化方向发展[23-24],但存在技术不成熟、运营成本高、普及范围小、水质污染严重等问题[25]。现今水质监测主要靠人工采集,再进行仪器检测,虽然准确度高,但效率低且周期长;另一种方式是采用传感器网络技术,在检测区域布置各类水质监测传感器,可以实现实时检测,却无法实现水质分层监测,而且传感器费用较高,作业区域也受限。基于上述问题,本研究设计了一款流线型作业型缆控水下机器人 (Remotely operated vehicle, ROV),将ROV 和多参数水质监测传感器组结合,搭建了一套完整的水质检测系统,通过抽水方式将采集水样输送到采样桶,然后由多参数传感器组和上位机软件实时监测水温、pH、DO 及盐度参数,可解决水产养殖中水质检测结果的片面性、局部性等问题,且能实现5 自由度灵活运动,可在不同深度下完成分层水质抽样检测;利用多参数传感器监测系统可以实时监测,同时具有观察鱼类生长环境和监控作业的功能,可提升养殖成效,助力海洋牧场建设。
1 ROV 系统方案设计
1.1 ROV 水质检测系统设计
ROV 整体水质检测系统由多参数水质监测传感器组和水下机器人组成,多参数水质监测传感器组检测采样的水质,水下机器人 (ROV) 为采样的载体。该水质监测系统作业过程为:在养殖舱甲板或岸上安装多参数水质监测传感器组,用水管搭载到机器人载体上,依靠机器人的高机动性通过手柄操控在养殖舱内到达不同的水层,经自吸泵吸水输送到传感器组,对水质的DO、温度、pH、盐度进行监测,利用上位机软件实现水质参数分析、记录和储存功能。整体水质检测系统流程见图1-a。根据3 种传感器的结构尺寸设计对应的固定结构,将传感器组固定在同一水平线上,保证水质参数采集数据的一致性和准确性,将3 个传感器通过螺栓和螺母固定在空隙位置,可以根据水位高低调节传感器组的位置,可以更换不同类型水质传感器获取不同的水质参数。整体传感器组见图1-b。
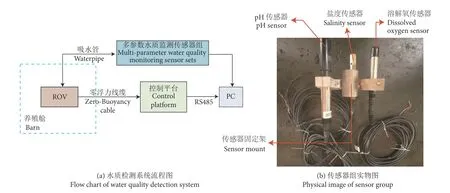
图1 ROV 水质检测系统设计Fig. 1 Design of ROV water quality detection system
1.2 ROV 系统设计
1.2.1 ROV 设计参数指标
ROV 整体采用流线型外壳结构设计,由6 个推进器、2k 分辨率的摄像头和可调节亮度的照明灯等组成。根据设计指标,要求ROV 可以满足多自由度运动包括升潜、转舵、进退、回转和横摇等5 个自由度;可以实现在指定位置悬停并配合水管进行抽水作业;能够拍摄水下视频并传输记录水底场景,同时记录ROV 水下姿态角、水下深度等信息。具体设计指标见表1。
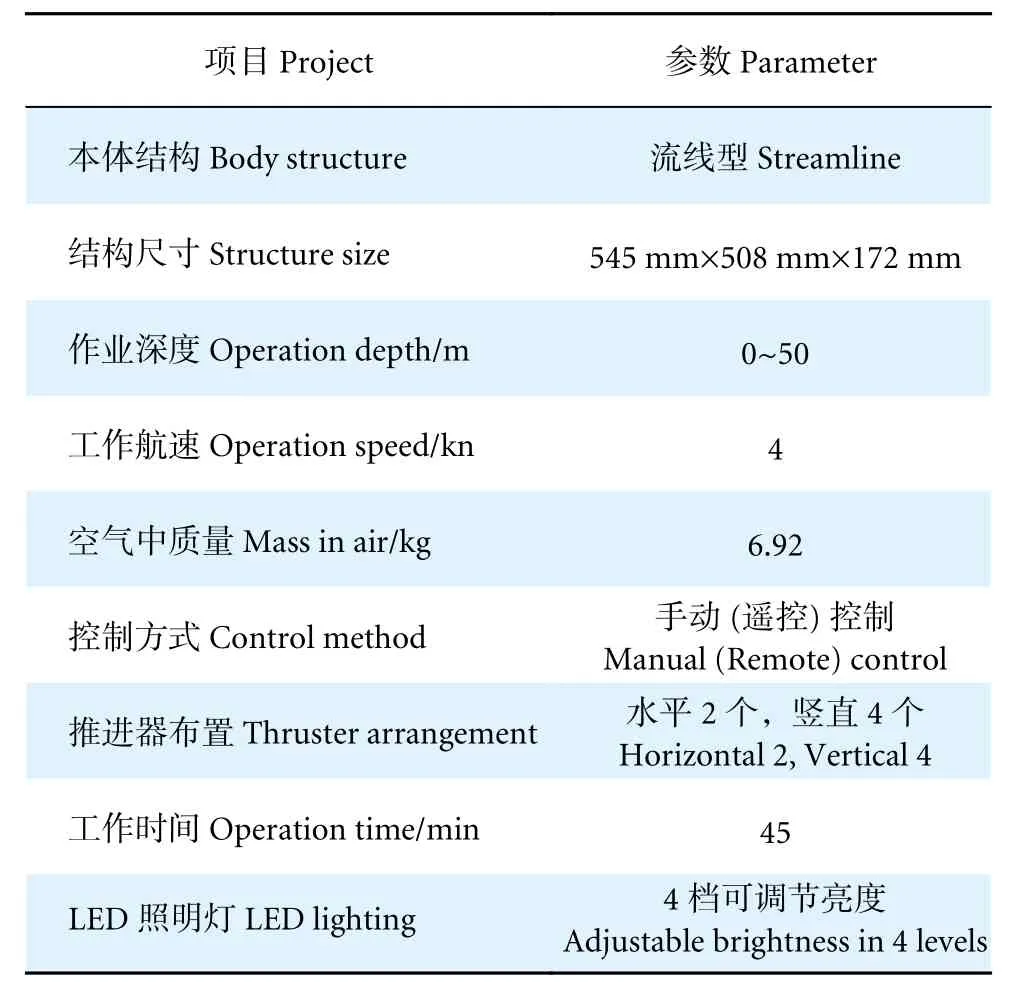
表1 ROV 整体设计参数指标Table 1 Parameter indicators of ROV overall design
1.2.2 ROV 系统组成
ROV 通过内部蓄电池为其供电,通过线缆为上位机发送信号指令并将收集的图像、传感器信号以及位置等信息传送给上位机,通过人机交互界面直观、清楚、准确地反映水下环境。ROV主要由水下机器人本体、线缆以及PC 端上位机组成。ROV 系统主要由动力系统、观测及照明系统、控制系统、外壳结构和抽水检测结构等组成。ROV 具体系统组成及系统设计流程图分别见图2、图3。
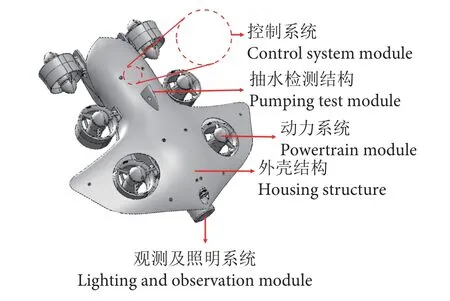
图2 ROV 系统组成Fig. 2 ROV system composition
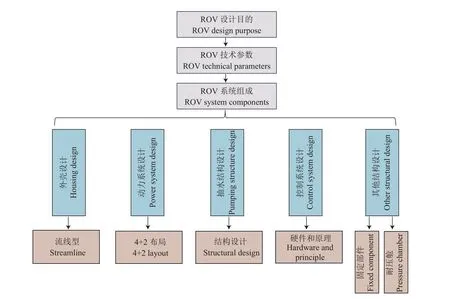
图3 ROV 系统设计流程图Fig. 3 Flowchart of ROV system design
2 ROV 机械结构设计
2.1 外壳设计
小型水下机器人具有运动速度敏捷、机动性高等特点,外壳作为水下机器人的重要载体与水直接接触,流线型外壳设计更好地满足了运动要求。由于本研究设计的外壳模型呈现不规则形状较多,且对水下压力要求较小,结合实际需求,选择采用高强度ABS[26-27]作为外壳材料,参数见表2。采用Solidworks 软件从美观、性能、实用性等角度出发设计外壳,外壳的主体结构包含摄像头和照明灯外壳、抽水外壳、推进器的外壳和固定结构。采用光固化3D 打印技术制造外壳 (图4)。
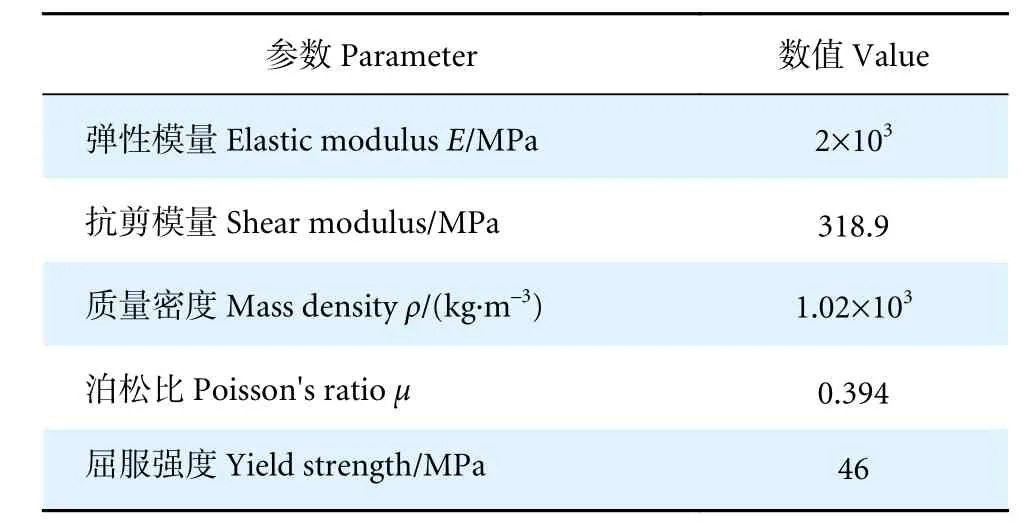
表2 ABS 物理参数Table 2 ABS physical parameters
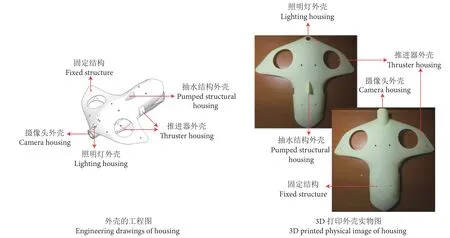
图4 ROV 外壳Fig. 4 Housing of ROV
为验证外壳设计是否满足强度要求,对ROV外壳进行应力仿真分析。利用Solidworks 软件进行建模并保存为IGES 格式导入Ansys 中;将上、下外壳定义为刚体,并定义材料属性为ABS 材料,参数设置见表2;采用自动网格划分方法划分网格;施加压力载荷,需满足水下机器人极限作业深度50 m,经计算施加载荷压力为0.5 MPa;将上、下盖两端的接口处添加固定支撑进行求解。求解后上、下外壳等效应力和总变形见图5。
仿真分析表明,水下机器人的上、下外壳最大总变形分别为0.061 382 和0.022 448 mm (图5-a, 5-b),属于微小变形,可忽略不计;上、下外壳最大等效应力 (MPa) 分别为 11.01≤σs=46和4.192 3 ≤σs=46(图5-c, 5-d),可满足ABS 材料屈服强度要求。根据数值模拟可知,外壳设计满足应力要求,说明整体外壳能满足水下50 m 的强度和压力要求。
2.2 动力系统设计
ROV 动力系统组主要由电机、推进器、供电系统组成,通过蓄电池为电机提供动能带动推进器运动,为ROV 提供在水中推进和移动的动力支持。ROV 整体布局采用6 个推进器总体设计,4 个在竖直方向和2 个在水平方向,在水平和竖直方向上的2 个推进器螺旋桨转速不同,还能够产生一定的力矩[28],竖直方向4 个推进器提供浮潜、纵倾、俯仰和转舵4 个自由度和水平方向2 个推进器为机器人提供进退自由度。为满足ROV 水下工作条件,采用一正一反6 个推进器,6 个推进器布置在同一轴线上,利用板材将6 个推进器固定在耐压舱两端,推进器的工作的平均功率在270 W,最大推力为700 N。
在竖直方向推进器的推力和扭矩表达式为:
在水平方向推进器的推力和扭矩表达式为:
由公式(1)、(2)可知,整体ROV 的推力和扭矩表达式为:
式中:T1和T2为x轴上推进器空间推力;T3、T4、T5和T6为z轴上推进器空间推力;T为表示空间推力;M为力矩。
ROV 进退自由的推力为T1+T2,浮潜推力为T3+T4+T5+T6,纵倾力矩为b(T3−T4+T5−T6),俯仰力矩为a(T1−T2) 和转舵力矩为a(T1−T2)。总体的分布见图6。
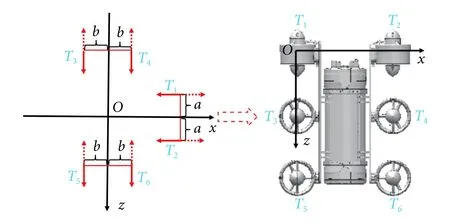
图6 推进器分布图Fig. 6 Thruster setup diagram
2.3 控制系统设计
ROV 控制系统是整个系统的心脏,控制ROV 的执行作业。控制硬件主要有主控制器Pixhawk、树莓派、电力载波模块、线缆和地面基站等组成。ROV 整体控制系统需要使用3.3、5、12 V 3 种电压,通过内置的24 V 可充电锂电池,经由多路DC-DC 电压转换模块分压即可获得相应电源。其中,5 V 电压供电给主控制器、树莓派和电力载波模块,推进器电机总功率需要在额定电压24 V 下,3.3 V 为整体的航姿参考系统供电;主控制器Pixhawk 由两片芯片STM32F427 和STM32F100 组成,STM32F427 为主芯片负责各类传感器数据采集和处理,负责视频传输和通信;ROV 的加速度计负责采集各坐标轴角度、角速度及角加速度;深度信息利用深度计通过压力信息解析获取,同时可以获取海水温度,实现温度计的功能。推进器采用差速P75 推进器,使用直流无刷电机并集成了电子调速器,经由控制器STM32F100产生PWM 信号对水下6 个推进器进行控制,实现推进器正反转的控制和调速功能;主控制器和树莓派通过USB 连接进行通信并传递相应控制信息,树莓派3B (Raspberry Pi 3B)微型计算机搭载有1.2 Ghz 64 位ARM Cortex-A53 四核处理器,通过线缆连接到水下电力载波模块Fathom X,Fathom X 以太网通讯板可利用双绞线完成长距离的以太网通讯,其中一个布置于水下机器人本体,另一个布置于地面操作系统内,二者均用于标准以太网通讯与双绞线以太网通讯的转化,水下电力载波模块将树莓派的视频信号转换到两根电力线上进行通信,水面电力载波模块将从电力线上传输过来的视频信号转换回网线接口连接至路由器上,以完成高清视频数据的采集发送以及以太网接口下的数据传输。整体的控制原理见图7。
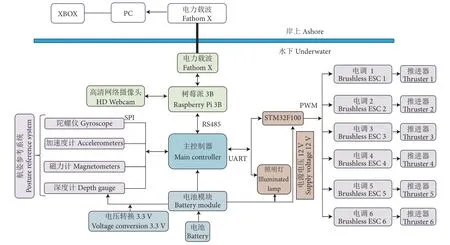
图7 ROV 控制系统原理图Fig. 7 Schematic diagram of ROV control system
姿态和深度控制是ROV 运动控制系统的重点和难点,其控制效果直接影响机器人的性能。ROV的控制从全局上可以理解为对电机进行控制,控制电机力矩的输入和输出。本研究采用非集中控制方式,通过4 个独立的控制器来对ROV 的姿态和深度进行控制,其由艏向角控制器、纵倾角控制器、横倾角控制器和深度控制器组成 (图8)。其中,艏向角控制器用于控制机器人在水中艏向角的平衡,它的输出量分别等量且相反控制机器人两侧2 个垂直推进电机;纵倾角控制器用于控制机器人在水中纵倾角的平衡;横倾角控制器用于控制机器人的偏航角;深度控制器用于控制下潜深度。4 个姿态控制器均采用PD 控制器。4 个姿态和深度控制器的输入分别为姿态角和深度的期望值,由解算得到的姿态角和深度实际值的比较偏差,通过上位机软件显示再进行调整。当需要定深时,以深度期望值与压力传感器测量计算得到的深度实际值比较得到的偏差,作为深度控制器的输入量。深度控制器输出深度控制量为PWM 信号控制电调增量,电调控制水平方向的4 个推进器进而控制ROV 的下潜深度。
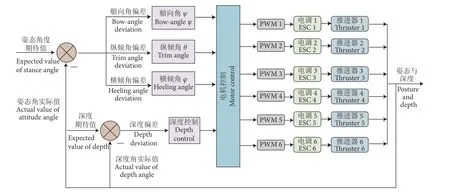
图8 ROV 姿态和深度控制原理图Fig. 8 Schematic diagram of ROV attitude and depth control
2.4 抽水检测结构设计
在ROV 外壳中端位置上采用抛物线线型设计3 口转换吸水管口,通过转换头1 连接水管,2 和3 为吸水口。整体抽水采用抛物线线型设计有利于减轻流体阻力,管口整体尺寸偏小长度为30 mm,宽度为60 mm,高度为45 mm,3 个管口半径为10 mm 见 (图9)。
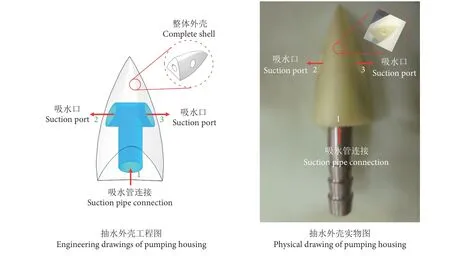
图9 抽水外壳Fig. 9 Drawing of pumping housing
2.5 其他结构设计
2.5.1 固定结构设计
ROV 的固定结构主要包括整体耐压舱的固定、6 个推进器同轴线固定、摄像机和照明灯固定(图10)。其中摄像机和照明灯采用环形夹具和卡扣配合螺母固定;耐压舱舱体采用密封舱安装座、安装座固定环和安装座支撑杆组成的固定环形柱固定,防止机器人在运动时耐压舱移位,顶端位置与外壳通过螺母固定;推进器采用板材固定,板材一端和固定环形柱通过螺丝固定,另一端等距对称固定6 个推进器。
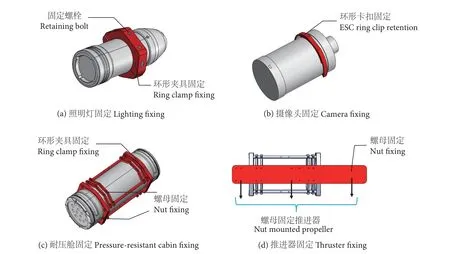
图10 ROV 的主要的固定结构Fig. 10 Main fixed structures of ROV
对上述固定部件进行有限元分析,判断是否满足设计应力要求。耐压舱的固定部件材料为铝合金,摄像机和照明灯的固定部件材料为结构钢,推进器固定板材采用胶木材料。3 种材料的参数见表3。
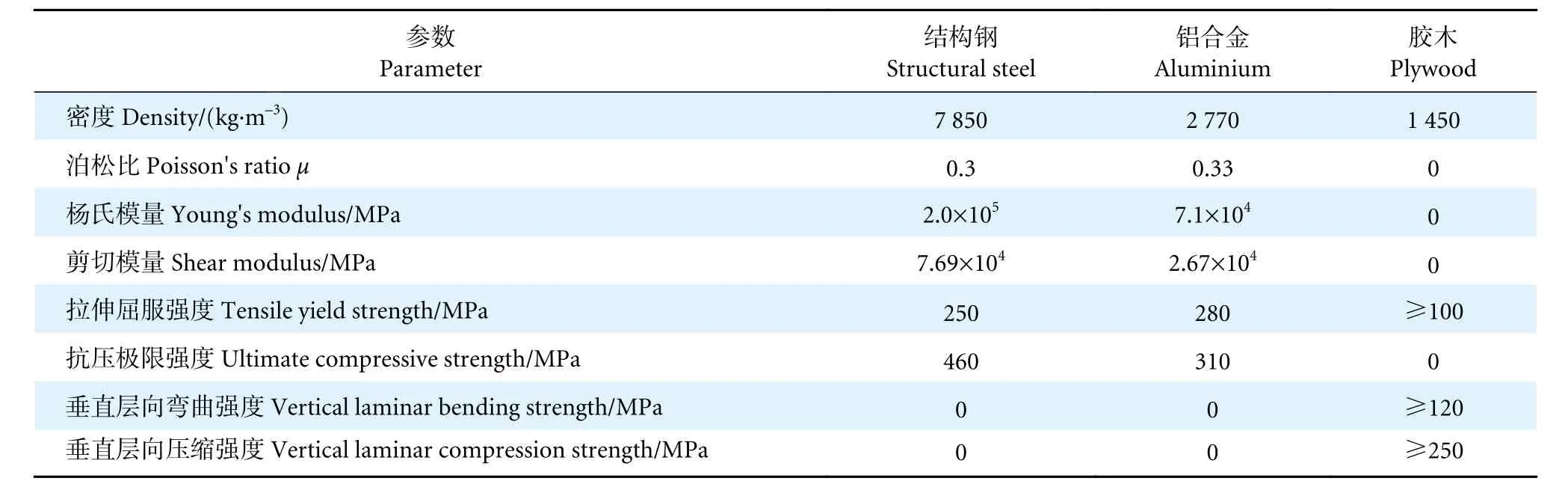
表3 3 种材料参数Table 3 Parameters of three materials
对所有固定部件进行前处理,网格划分及外部载荷施加,施加压力为0.5 MPa,进行求解。求解后数值模拟云图见图11。
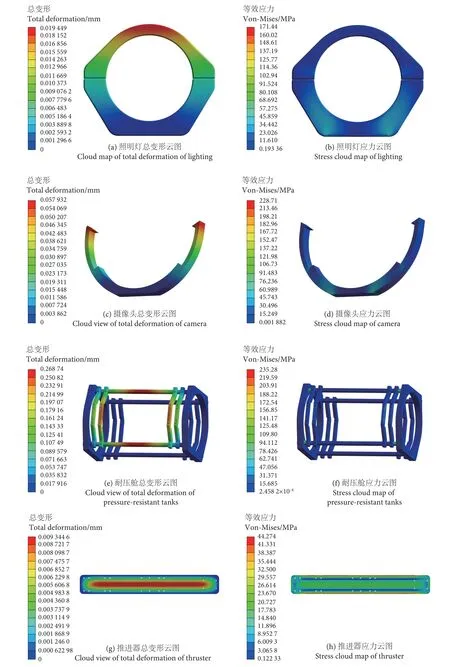
图11 各个固定部件数值模拟云图Fig. 11 Numerical simulation of each fixed part
由固定部件的仿真结果可知,图11-a—11-b照明灯固定部件的最大变形度为0.019 449 mm,变形度较小,可忽略不计,等效应力为171.44 MPa,小于结构钢的屈服强度 (250 MPa),满足50 m 的压力要求;图11-c—11-d 摄像机的固定部件的最大变形度为0.057 932 mm,变形度较小,等效应力为228.71 MPa,小于结构钢的屈服强度 (250 MPa),满足50 m 的压力要求;图11-e—11-f 耐压舱的固定部件的最大变形度为0.268 74 mm,变形度较小,等效应力为235.28 MPa,小于铝合金的屈服强度 (280 MPa),满足50 m的压力要求;图11-g—11-h 6 个螺旋桨固定部件的最大变形度为0.009 344 6,变形度较小,等效应力为44.274 MPa,小于胶木的垂直层向弯曲强度和屈服强度(100 MPa),满足50 m 的压力要求。综上所述,ROV 所有的固定部件的强度和设计均满足水下50 m 的要求。
2.5.2 耐压舱结构设计
耐压舱内装载了ROV 核心部件,包括控制板、电源板、电子罗盘、水下摄像机、照明器(LED等)、深度传感器、温度传感器和各类连接线等。耐压舱需具备密封保护电子元件的作用,基于流线型的外壳将耐压舱设计为圆柱形状,采用了亚克力材料(PMMA),具体参数见表4。首先对整个耐压舱舱体强度、安全系数等进行理论计算[29-30],然后通过Ansys 软件的静应力分析判断舱体应力、应变及安全系数是否满足在水中的强度和刚度要求。
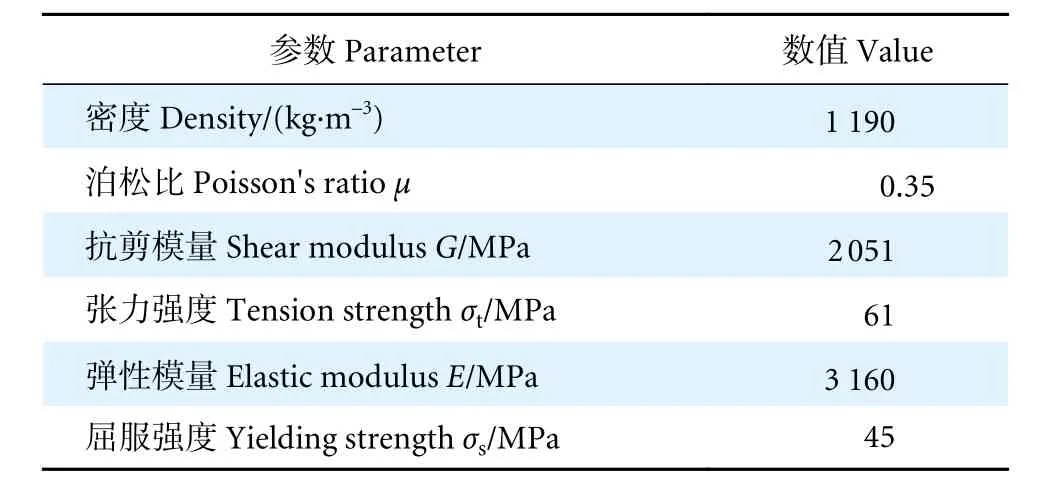
表4 亚克力材料属性Table 4 Properties of acrylic material
在标准大气压下,压强的计算公式为:
式中:ρ为海水密度 (kg·m—3);g为重力加速度 (9.8 N·kg—1);h为作业深度 (m)。
由劳氏规范安全系数知,PMMA 材料的安全系数最小为2.5[31],目前设计的耐压舱的厚度为5 mm,长度L= 280 mm,直径D= 100 mm,ROV 潜水深度介于1~50 m,取ξ= 5 mm,计算临界压力PC为:
安全系数为:
由于n= 3.268 > 2.5,故安全系数能满足水下50 m 的设计要求。
强度计算要求判断耐压舱所受外力分类,主要有长圆筒、短圆筒两种,由公式判断为:
耐压舱的长度L= 270 (mm) <LC=523.224(mm),故判断为短圆筒。利用米塞斯 (Mises) 公式简化后,计算最小临界应力的公式为:
取安全系数n=2.5,则:
耐压舱壳体的压力σn为6.561 28 MPa,小于PMMA 许用应力的值 (22.5 MPa),即耐压舱壳体能满足50 m 的强度要求。
在理论计算的基础上,利用Ansys 有限元仿真软件对耐压舱壳体进行静应力仿真分析,求解后的等效应力、合位移、等效应变、安全系数云图等仿真结果如图12 所示。
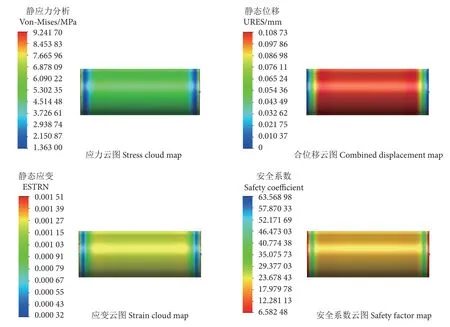
图12 耐压舱数值模拟Fig. 12 Numerical simulation of pressure-resistant chamber
耐压舱外壳的最大总变形为0.108 73 mm,最大等效弹性应为0.001 51,属于微小变形,可忽略不计;最大等效应力为 9.24 MPa ≤σs=45 MPa,满足PMMA 材料的物理特性,在理论计算和静应力仿真上均满足设计要求,说明耐压舱舱体可以满足水深50 m 的设计要求。
3 试验测试
对ROV 试验测试包括水下性能测试和水质检测试验。在浙江海洋大学拖曳水池对ROV 的自由度、稳定性、密封性以及上位机软件控制性能等进行试验,验证ROV 设计的合理性与科学性。试验器材包括:试验水池,ROV 整体,传感器组(DO 传感器、盐度传感器、pH 传感器),传感器固定支架,采样桶,自吸泵,水管及浮力材料等 (图13)。
3.1 ROV 软件调试
上位机软件调试包括ROV 控制系统软件和多参数传感器组数据采集软件。ROV 上位机软件采用开源的QGround Control (QGC),通过QGC 调试ROV 推进器推力、各类传感器作业参数、照明和观测系统、数据传输等功能,为水下试验提供作业前提。多参数传感器组数据采集软件由pH 传感器、DO 传感器、盐度传感器组成。调试方法为将传感器组调平后放到水中采集10 min,采集速率为1 s,通过软件观察曲线变化。两者调试试验见图14。
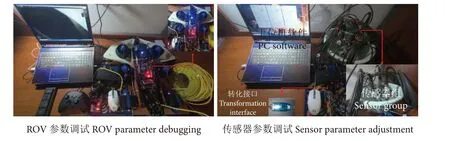
图14 ROV 控制系统软件和传感器数据采集软件调试Fig. 14 ROV control system software and sensor data acquisition software commissioning
3.2 ROV 性能测试
通过X-BOX 控制ROV 到达指定的深度,采用定深悬停命令在指定的位置悬停,通过自吸泵吸水输送到传感器组,对水质DO、温度、pH 和盐度进行监测;在光线暗淡或水质较差的作业环境下,可调节ROV 的照明系统,以满足水下高清视频、图片要求。现场抽水及观测试验见图15。
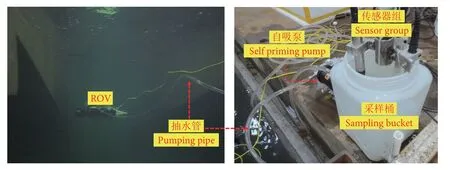
图15 抽水及观测试验Fig. 15 Pumping and observation experiment
3.3 ROV 自由度测试
ROV 是一个复杂的系统,其中水下自由度为其重要组成部分。为进一步验证ROV 在不同水深下正常作业的可行性,于水池中进行了潜水试验。测试中,ROV 的目标下潜深度设定为4 m,通过X-BOX 控制,验证ROV 是否满足设计要求,ROV 自由度测试见图16。经过试验验证,ROV 的水下自由度能满足设计要求。
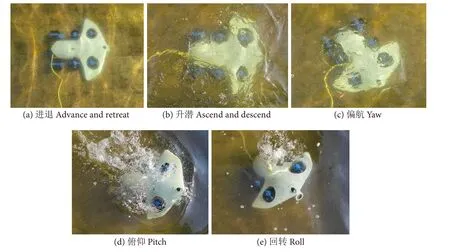
图16 ROV 自由度测试Fig. 16 Freedom test of ROV degrees
3.4 水质检测测试
在本次测试中,ROV 测试的下潜深度为0~4 m,并在池中保持定深状态,通过自吸泵吸入采样桶中,30 min 内定点采集水池的水样,经传感器组检测,通过上位机软件实时监测水温、pH、DO 和盐度4 个水质指标随时间的变化情况。ROV在指定1 m 位置悬停的4 个参数变化见图17,在1、2、3 m 的变化见图18。

图17 ROV 在水深1 m 的温度、溶解氧、pH 和盐度变化Fig. 17 Changes of temperature, DO, pH and salinity of ROV at water depth of 1 m
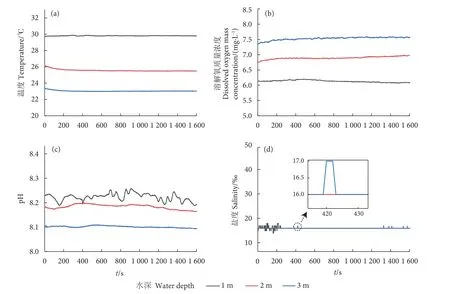
图18 ROV 在不同水深的温度、溶解氧、pH 和盐度变化Fig. 18 Changes of temperature, DO, pH and salinity of ROV at different water depths
4 小结
目前国内外针对水质检测的ROV 设计与研究报道较少,水产养殖中的水质检测仍存在监测片面性、局部性、作业区域受限以及监测周期长等问题,尚未得到有效解决。基于国内外的研究现状,本研究设计了一种小型作业型ROV,用于监测水产养殖中的水质。样机的性能测试和水质参数测试结果显示,ROV 的性能可满足工作要求;在水质参数测试中,ROV 可以达到指定位置进行分层和定点水质采样。此外,还可以更换不同传感器,如氨氮传感器、氧化还原电位传感器(ORP)、浊度传感器等进行抽水测试,以满足不同的水质检测需要。
