拖挂式移动机器人的多约束避障轨迹规划
2024-03-04宋保业田运阳
宋保业,吴 尤,田运阳,许 琳
(山东科技大学 电气与自动化工程学院,山东 青岛 266590)
拖挂式移动机器人(tractor-trailer mobile robot,TTMR)是一种由牵引车和挂车组成的复杂多体机械系统,能够根据应用场景灵活改变挂车的数量,具有较强的运载能力。目前,TTMR的应用场景有大型机场的行李运输,火车站、货运港口的货物运输,自动化工厂的物料运输等[1-3]。在各种应用场景中,沿结构化道路行驶的TTMR需要对道路上出现的障碍物进行避障,考虑避障过程需要满足的平稳性、舒适性和交通效率等,研究TTMR在多约束条件下以最优避障时间和最优避障距离完成避障轨迹规划,对提高TTMR的作业效率具有重要意义。
由于TTMR具有特殊的结构特征,在前向和后向运动时存在不同的运动机理[4-5],所以在进行避障轨迹规划时需要考虑以下因素:为了避免车体间发生折叠现象,牵引车与挂车之间的铰接角必须限制在合理范围内;考虑到牵引车驱动电机的响应特性,系统的控制输入存在明显的饱和约束;为了保证系统在横向上无滑移现象,牵引车车轮和挂车车轮均满足非完整约束条件。
TTMR避障轨迹规划研究得到了国内外学者的大量关注。文献[6]为实现TTMR多障碍场景下的轨迹规划,基于生成对抗网络 (generative adversarial networks,GANs)和直接轨迹规划(direct trajectory planning,DTP)建立了GDTP模型,并将该模型嵌入到快速搜索随机树(rapidly-exploring random tree,RRT)中进一步设计了GDTP-RRT算法,多场景实验验证了该算法具有高可靠性,但算法的性能和效率有待进一步提高;文献[7]基于半监督学习提出一种新的TTMR路径规划方法,其关键是构造一个路径代价函数并通过编码器—解码器类型的深度神经网络训练,但由于深度学习方法的概率特性,该方法很难实现100%的路径可行性;文献[8]提出一种基于凸多边形形式的TTMR避障路径规划方法,通过Farkas引理将表示TTMR和周围环境的多个凸多边形对象转换为无碰撞约束,并将这些约束与目标函数结合后求解最优化问题,但是寻找适合所提方法的求解器比较困难;文献[9]为了实现TTMR自动泊车,改进了混合A*搜索算法,提出双向A星-搜索导引树(bi-directional A-search guided tree,BIAGT)算法,通过硬件在环仿真验证了算法的有效性,但该算法的搜索完整性不足。近年来,由于多项式轨迹规划方法便于算法扩展,且规划的参考轨迹仅与系统的初末状态有关,因此在许多领域得到了应用[10-12]。文献[13]采用三次多项式设计满足自主车辆运动学约束的移动路径,设计的曲线路径易于轨迹跟踪控制器的实现,但曲线路径一旦设计完成不易调节,并且多项式系数的微小噪声会造成曲线形状的较大变化;文献[14]提出基于时间的五次多项式函数规划参考轨迹,仿真结果表明五次多项式函数生成的参考轨迹更简单、平滑,无尖锐点和突变点等,但是没有考虑系统初末位置的横向、纵向急动度以及轨迹曲率、曲率导数的约束。
针对上述问题,本研究在速度、加速度、急动度、曲率及曲率导数等多约束条件下,基于七次多项式函数研究了拖挂式移动机器人的避障轨迹规划问题。选取的优化目标函数同时考虑了最优避障时间和最优避障距离,能够满足避障过程中对机器人平稳性、舒适性和交通效率的要求。通过仿真对比实验,验证了提出的多约束条件下拖挂式移动机器人的避障轨迹规划方法的有效性。
1 拖挂式移动机器人数学建模
1.1 TTMR系统描述
TTMR系统由两节车体组成,前一节为差速驱动转向的牵引车,后一节为无动力源的挂车,两节车体之间通过一个刚性轴采用标准链接方式连接。标准链接方式是指相邻两车体的链接点在前一车体驱动轮轴的中心点上。此外,牵引车安装有两个受独立电机驱动的主动轮和一个可沿任意方向移动的用来维持车体平衡的万向轮。整个系统通过牵引车左右两个独立电机提供的输出扭矩以实现对挂车车轮轴中心点K的控制,TTMR系统结构如图1所示。图1中,P和Pc表示牵引车车轮轴中心点和牵引车车体的质心点;K表示挂车车轮轴中心点;b表示两平行车轮间距的一半;d和l分别表示P与K、P与Pc之间的距离;(x,y)和(x1,y1)分别表示K和P在全局坐标系下的坐标;φ和θ分别表示牵引车和挂车的航向角。

图1 TTMR系统结构
为了方便研究作以下假设:TTMR由刚性构件组成;车轮在移动时为纯滚动,不发生滑移;每个车体的车轮与地面均为单点接触;不考虑内部阻尼与电机动态特性的影响。
1.2 运动学模型
1) 前向运动时的运动学模型
基于车轮移动时纯滚动、无滑移的假设,系统存在非完整约束条件为:
(1)
引入广义坐标系q=[x,y,φ,θ]T,对TTMR的位置和姿态信息进行描述。定义u=[υ,ω]T为系统的输入向量,υ为牵引车在P点的线速度,ω为牵引车的角速度,得到TTMR前向运动时的运动学模型为:
(2)
2) 后向运动时的运动学模型
当TTMR后向运动时,系统存在非完整约束条件为:
(3)
计算可得TTMR后向运动时的运动学模型为:
(4)
2 避障轨迹规划
2.1 避障轨迹设计
由于多项式轨迹规划方法只需知道系统的初始状态和最终状态,不需考虑系统的中间过程,并且多项式函数本身及其一阶、二阶、三阶导数均是光滑的,这使得差速驱动的移动机器人在轨迹跟踪过程中无需在不同状态之间频繁切换[15]。此外,考虑车体在移动过程中的平稳性,状态开关的急动是不允许的[16]。因此,本节基于多项式理论对TTMR的避障轨迹进行设计。
对于TTMR的避障轨迹规划,原则上需要分别对牵引车和挂车的避障轨迹进行规划。然而,假设挂车的避障轨迹为(x(t),y(t)),通过图1所示的TTMR系统结构可以得到:
(5)
因此,只需规划出挂车的避障轨迹,即可通过方程组(5)获得牵引车的避障轨迹。TTMR的前向避障过程和后向避障过程分别如图2、图3所示。
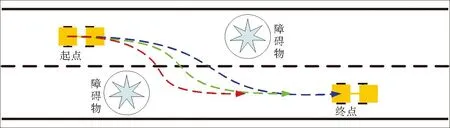
图2 前向避障过程
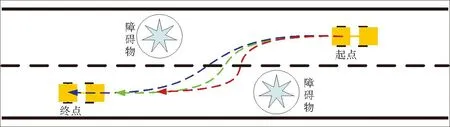
图3 后向避障过程
考虑到避障过程中的稳定性和舒适性,需要对TTMR初/末位置的横向和纵向速度、加速度、急动度以及避障轨迹的曲率和曲率导数等进行约束。根据七次多项式函数中含有的未知数个数可知,求解所需方程数为8个。由于本研究考虑了TTMR在初/末位置的速度、加速度、急动度等共8个状态向量,可对应8个含有未知数的多项式方程,所以在x方向和y方向选用七次多项式作为避障轨迹,并对结构化道路下的避障场景作以下假设:TTMR始终沿道路中心行驶且障碍物也在道路中心;避障轨迹的起点与坐标系原点重合;避障过程中无其他车辆的影响;车载传感器能够在安全避障距离xs以外检测到障碍物。
在x方向和y方向选用七次多项式为:
(6)
对方程组(6)求一阶、二阶、三阶导数,代入系统的初始状态向量和最终状态向量得:
(7)
式中:a=[a0,a1,…,a7],b=[b0,b1,…,b7],
给定系统的初始状态和最终状态为:
(8)
式中:xf表示TTMR的避障距离;yf表示TTMR行驶的横向位移,由于TTMR始终沿着道路中心运动,所以yf等于道路的宽度W。
将初始状态与最终状态代入方程组(7)解得多项式系数,最终只需确定W、υ0、xf、tf这4个未知参数即可确定一条避障轨迹:
(9)
2.2 系统约束条件
考虑到牵引车两个驱动电机的响应特性,系统的控制输入受到明显的饱和约束,因此需要对TTMR的实际行驶速度进行限制:
(10)

(11)

(12)

(13)
(14)
(15)
需要注意的是,为了使生成的后向避障轨迹比前向避障轨迹更平滑,防止因TTMR的铰接角过大导致两节车体陷入危险的折叠状态而失去稳定性,系统约束条件(10)~(15)在实际应用中可适当降低。
2.3 求解目标函数
根据方程组(9)可知,只需确定W、υ0、xf、tf这4个未知参数的取值,即可确定一条避障轨迹。避障过程是否安全受到避障时间tf和避障距离xf的直接影响,因此随意地给tf和xf赋值是不可取的[17]。同时兼顾避障过程中平稳性、舒适性、交通效率的要求,选取目标函数为:
(16)
式中:g1、g2和g3表示正的权重因子,g4表示正常数。因此基于系统约束条件(10)~(15)和目标函数(16),含有不等式约束条件的优化问题可以描述为:
(17)

3 仿真结果与分析

表1 前向避障时的权重系数和约束条件

图4 前向避障轨迹规划结果

图5 前向避障时的多项式曲线各参数变化

表2 后向避障时的权重系数和约束条件
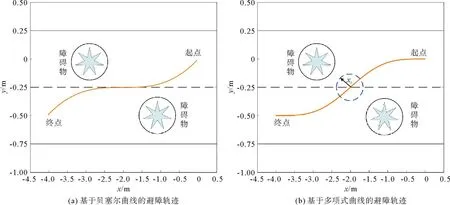
图6 后向避障轨迹规划结果
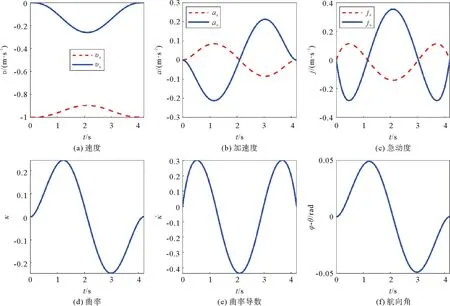
图7 后向避障时的多项式曲线各参数变化
4 结论
本研究针对TTMR沿结构化道路前向和后向运动时躲避障碍物的避障轨迹规划进行了研究。首先,在保证系统非完整约束的前提下,分别建立了TTMR前向和后向运动时的运动学模型;然后,基于七次多项式函数分别规划了TTMR前向和后向避障轨迹,并引入约束条件和目标函数对避障时间和避障距离进行优化;最后,使用MATLAB对所规划的避障轨迹进行对比仿真验证。仿真结果表明,在多约束条件下采用七次多项式函数作为TTMR的避障轨迹是一个较佳的选择。基于七次多项式曲线的避障轨迹规划方法能够显著提高TTMR沿结构化道路行驶时的避障能力,可以为铰接式车辆的相关研究提供理论借鉴。
