基于滑模PI控制的电动汽车集群出力与调频联合优化
2024-03-04吴二博王要强陈天锦
吴二博,梁 军,3,黄 征,王要强,陈天锦
(1.郑州大学 电气与信息工程学院,河南 郑州 450001;2.河南省电力电子与电力系统工程技术研究中心,河南 郑州 450001;3.卡迪夫大学 工程学院,英国 卡迪夫 CF24 3AA;4.许继电源有限公司,河南 许昌 461000;5.河南省智能充电技术重点实验室,河南 许昌 461000)
0 引言
近年来,面对日益严峻的能源与环境危机,世界各国对于汽车行业的优惠政策越来越偏向于电动汽车(electric vehicle,EV)。针对EV制造商和用户,我国也推出了相应的政策来促进和鼓励EV 的制造与推广。相关数据显示,新能源汽车的销量已经连续3年超过100万辆,呈持续高速增长态势[1]。
随着EV数量的增长,越来越多的EV需要充电。而大量的负荷接入电网会对电压、频率、稳定性等产生影响。私家车作为EV的一个庞大群体,大多数私家车每天平均有96 % 的时间处于停驶状态[2],且EV既可以作为负荷,又可以作为电源,这为EV 与电力系统进行能量交互提供了可能,即车联网(vehicle to grid,V2G)。根据电力系统的需求对EV 集群进行充电和放电,利用这一特性能够调节电力系统的负荷峰谷差、减小电压偏移、避免频率失稳等[3]。
利用EV 集群调节电力系统的频率稳定已经成为许多学者的主要研究方向之一。文献[4]提出了一种管式模型预测控制(model predictive control,MPC)方法,并设计了扰动观测器来观测扰动大小。文献[5]将改进的滑模控制(sliding mode control,SMC)作为系统调频模型的基础控制器。文献[6]采用分层自适应控制策略对系统频率进行控制,其中主控制器采用SMC,EV 集群采用自适应控制方法。SMC在系统受到较大的负荷扰动时具有优良的动态性能,但在稳态控制中会出现抖振现象。文献[7⁃8]在EV参与辅助调频时,采用比例-积分(proportionalintegral,PI)控制对EV 集群进行控制。PI 控制在系统受到随机负荷扰动时具有较好的静态性能,但当受到较大负荷波动时,系统会出现超调现象。为了适应系统复杂的负荷需求,本文将SMC 与PI 控制相结合产生系统的控制信号,并采用模糊算法协调EV和发电机的出力,使系统具有优良的动态和静态性能。
电力系统调频不仅要求频率稳定,还需要考虑调频经济性等。EV 集群参与辅助调频有助于系统的频率稳定性,但是会增加系统的调频成本。文献[9]考虑EV 具有快速响应特性,将频率偏差的高频信号分配给EV 集群。文献[10⁃13]在EV 参与电网调频的过程中考虑了动力电池的损耗因素。文献[14⁃15]分析了EV 集群参与辅助服务的经济效益和环境效益。上述研究主要分析了EV 集群参与调频过程中的电池损耗和V2G 的经济效益,较少考虑发电机与EV 集群之间的协调出力和调频成本以及EV集群在参与电力系统调频过程中的最佳车辆投入比例。在调频过程中,EV 集群出力与参与调频的EV数量和单辆EV 的出力有关。为了兼顾调频效果和调频成本,本文采用粒子群优化算法对EV集群出力和调频效果进行联合优化。
基于上述分析,本文针对EV集群参与电网调频的效果与调频经济性问题,提出了基于滑模PI 控制的发电机和EV集群联合优化方法;建立了考虑不同类型EV参与的负荷频率控制模型,并以系统调频成本和频率稳定为目标,对EV集群的车辆投入比例参数进行优化;基于MATLAB/Simulink 对所提方法进行仿真验证。
1 EV集群参与系统调频模型
本文建立了单区域内EV 集群参与电网调频的负荷频率控制模型,如图1 所示,其主要分为主控制器和EV 集群控制器。目前EV 有不同的车型,本文主要考虑私家车、公交车、出租车这3 种类型EV,每种类型EV组成1个EV集群参与调频。

图1 单区域内EV集群参与电网调频的负荷频率控制模型Fig.1 Load frequency control model of EV cluster participating in power grid frequency regulation in a single region
图1 中:R为调差系数;Up、Ue分别为主控制器、EV 集群控制器的输出信号;Tg、Tt分别为调速器、原动机的时间常数;ΔPv为调速器位置的变化量;ΔPm为发电机输出机械功率的变化量;ΔPload、ΔPres分别为负荷功率变化量、可再生能源功率变化量;M为惯性时间常数;D为负荷阻尼常数;Δf为频率偏差量;Spri、Sbus、Staxi分别为私家车、公交车、出租车调频信号的分配比例,如式(1)所示;Tpri、Tbus、Ttaxi分别为EV集群中私家车、公交车、出租车的时间常数;Npri、Nbus、Ntaxi分别为集群中参与调频的私家车、公交车、出租车数量;Ppri、Pbus、Ptaxi分别为集群中私家车、公交车、出租车的充放电功率;PA_pri、PA_bus、PA_taxi分别为私家车、公交车、出租车集群的总输出功率;ΔPev为EV集群的总输出功率,即私家车、公交车、出租车集群的总输出功率之和,如式(2)所示;变量均为标幺值。
当研究系统频率调节问题时,在EV集群的建模过程中,本文假设同一类型EV 的参数相同,而对于不同类型的EV,只考虑其时间常数、最大充放电功率和接入电网数量的变化。私家车、公交车、出租车的充放电功率满足式(3)所示约束条件。
式中:P、P、P和P、P、P分别为私家车、公交车、出租车充放电功率的上限值和下限值。
2 EV集群参与系统调频的控制策略
对于主控制器和EV 集群控制器,采用SMC 与PI 控制结合产生控制信号,进而调节调速器与原动机。清洁能源大量接入电网、负荷的随机波动导致电网的发电和用电具有很大的不确定性。为此,智能电网迫切需要一种具有良好鲁棒性的频率控制器。SMC 在动态控制过程中具有响应速度快、抗扰动性强的优良性能,但是在稳态控制过程中会引起小幅度的抖振,这也是目前SMC 应用于工程实践存在的主要问题。PI控制在动态控制过程中会有一定的超调量,而在稳态控制过程中具有优良的稳态性能[16⁃17]。本文将SMC与PI控制相结合对系统进行控制,使系统不仅具有SMC 的动态性能,还具有PI 控制的稳态性能,从而增强系统的抗扰动性、鲁棒性。
由图1可得:
式中:ΔPd=ΔPload-ΔPres。
本 文 列 写 状 态 变 量X=[Δf,ΔPm,ΔPv,PA_pri,PA_taxi,PA_bus]T。设计滑模面S=CX,其中系数向量C=[c1,c2,c3,c4,c5,c6],且c6p6+c5p5+c4p4+c3p3+c2p2+c1p满足劳斯稳定判据。SMC中的滑模趋近率采用恒速趋近律,̇=-εfsat(S),其中ε为趋近律增益系数,fsat(S)为饱和函数。由式(4)—(7)可以列写如下方程:
式中:A、B、B'、F为系数矩阵或向量;U为控制信号;Ue(p)为EV集群(主控制器)的控制信号。
2.1 主控制器
主控制器想要得到的控制信号为Up,由滑模趋近率̇=-εfsat(S)结合式(8)可以得到主控制器中的滑模控制信号Up_SMC为:
则控制信号Up可表示为:
式中:Up_PI为主控制器中的PI控制信号。
此时,式(8)中的A、B、B'、F见附录A 式(A1)。
趋近律增益系数ε的取值需要满足李雅普诺夫稳定性定理,本文选择李雅普诺夫函数L=0.5S2,对其求导可得:
当ε≥|CFΔPd|时,L̇=SṠ≤0。根据李雅普诺夫稳定性定理,SMC可以稳定系统的频率波动,并且具有较强的鲁棒性和抗干扰性。
PI控制信号Up_PI可表示为:
式中:Kp_p、Kp_i分别为PI控制器的比例、积分参数。
2.2 EV集群控制器
本文利用模糊优化算法根据频率偏差量生成一个控制信号的可变系数,其能够在系统发生负荷扰动时,避免EV集群持续大量出力。当系统发生负荷扰动时,系统的频率偏差量、频率偏差量的变化率会发生较大的波动,模糊优化算法生成的可变系数也相应增大,EV 集群的输出功率呈增大趋势;当系统逐渐稳定后,频率偏差量、频率偏差量的变化率减小,模糊优化算法生成的可变系数也相应减小,EV集群的输出功率呈减小趋势。本文以系统频率偏差量、频率偏差量的变化率作为模糊优化算法的输入参数,输出信号为Ufuzzy,Ufuzzy经过一阶滤波器后得到系数β,如图2所示。图中:Tf为滤波器的时间常数。

图2 EV集群控制信号生成框图Fig.2 Block diagram of generating EV cluster control signal
由图2可知EV集群的控制信号Ue为:
式中:Ue'=Ue_SMC+Ue_PI;Ue_SMC、Ue_PI分别为EV 集群控制器中的SMC信号、PI控制信号。
由滑模趋近率结合式(8)可得:
此时,式(8)中的A、B、B'、F见附录A式(A2)。
对于李雅普诺夫稳定性的证明,与主控制器的证明方法类似,即当ε≥|CFΔPd|时,L̇=SṠ≤0,满足李雅普诺夫稳定性定理,会使系统稳定收敛。
PI控制信号Ue_PI可表示为:
式中:Ke_p、Ke_i分别为PI控制器的比例、积分参数。
3 EV集群出力与调频联合优化
在保证系统频率稳定的前提下,本文以调频成本和频率偏差量最小为目标,且考虑发电机出力和爬坡速率约束、EV 集群车辆投入比例约束等,构建EV 集群出力与调频联合优化模型,并采用粒子群优化算法进行离线求解。其中EV 集群车辆投入比例α为集群中参与辅助调频的EV 数量Nev_V2G与集群中接入电网的EV数量Nev之间的比值,如式(16)所示。
通过对《梁书·沈约传·郊居赋》:“或辞禄而反耕,或弹冠而来仕。”晋 葛洪 《抱朴子·自叙》:“内无金张之援,外乏弹冠之友。”典例的分析,用典者所要表达的意思为将出来做官或比喻相友善者援引出仕,没有与别人庆贺之意,所以创造了“弹冠”这一典例。
3.1 优化目标函数
在EV集群参与电网辅助调频的过程中,不仅要表现出良好的调频性能,也要使电网调频的经济性更优。综上所述,本文的优化目标函数见式(17)。
式中:F为目标函数值;C为辅助调频总成本;Γ为频率稳定指标;k1、k2为权重系数,用于将辅助调频总成本与频率稳定指标归算至同一数量级下。
辅助调频总成本C主要包括发电机的燃料成本Cfuel、EV 集群的补偿成本CV2G和EV 电池的损耗成本Cb,如式(18)所示。
式中:a、b、c为汽轮机组的发电成本系数;PG为汽轮机组的出力;PN为系统的基准功率;E为EV 的调频电量,本文将其定义为EV参与电网辅助调频的过程中,根据电网需求进行充放电的电量;ϕ为电网给予EV 用户的补偿单价,以激励EV 用户积极参与电网调频;kb为单位电能折合的电池损耗费用率。
为了衡量系统的频率稳定,本文采用标幺值下系统频率偏差量的绝对值对时间的积分作为频率稳定指标,如式(24)所示。
3.2 约束条件
以调频过程中电网所需要承担的调频总成本和系统频率稳定指标为优化目标,以私家车、公交车、出租车集群参与电网调频的车辆投入比例αpri、αbus、αtaxi作为优化参数,且发电机出力和爬坡速率、EV 集群的车辆投入比例需满足以下约束:
式中:P、P分别为发电机输出功率的最小值和最大值;PG,t+1、PG,t分别为t+1、t时刻发电机的输出功率;Δt为时间间隔;Rdown、Rup分别为发电机的向下、向上调节速率限值;α、α、α和α、α、α分别为私家车、公交车、出租车集群车辆投入比例的最小值和最大值。
3.3 优化流程
粒子群优化算法根据鸟群的捕食行为进行模拟优化,具有简单易实现、收敛速度快的特点,因此本文采用粒子群优化算法对以式(17)为目标函数的优化模型进行求解,具体优化流程见附录A图A1。
4 算例仿真
本文在MATLAB/Simulink平台进行算例仿真,设置仿真步长为0.01 s,建立的微电网系统的基准容量为300 MW,其中发电机输出功率的最小值、最大值分别为120、300 MW。私家车、出租车的电池容量均为40 kW·h,最大充放电功率为15 kW;公交车的电池容量为200 kW·h,最大充放电功率为20 kW。SMC 中的C=[2,0.1,0.4,0.01,0.01,0.01],主控制器的趋近律增益系数ε取值为8.1,PI控制器的Kp_p、Kp_i取值分别为0.2、15;EV 集群控制器的趋近律增益系数ε取值为4,PI 控制器的Ke_p、Ke_i取值分别为0.02、1。一阶滤波器的时间常数Tf为5 s。本文参考郑州市的私家车、出租车、公交车比例[18],设置模型中私家车、出租车、公交车集群数量。系统参数如附录A表A1所示。对于不同类型的车辆而言,除了功率和能量不同外,其行为方式也有很大的不同[19]。根据3 种类型EV 的职能以及行为方式特点,模拟3 种类型EV在不同时间接入电网的数量,变化曲线如附录A图A2所示。
系统的负荷扰动由阶跃负荷扰动、可再生能源发电和随机负荷扰动组成,其中随机负荷扰动由白噪声模拟得到。在随机负荷扰动的基础上,在40 s时施加阶跃负荷扰动,在110 s 时阶跃扰动消失,此时随机负荷扰动和可再生能源发电依然存在,系统的负荷扰动曲线见附录A图A3。
4.1 发电机容量充足的工况
在3 个EV 集群全部参与辅助调频的情况下,施加图A3 所示负荷扰动,对比PI 控制、SMC、MPC、滑模PI控制下系统的频率偏差量以及发电机、EV集群的出力(标幺值)情况,结果如图3 所示。为了对比分析,本文设置PI 控制、SMC 的参数与滑模PI 控制的参数保持一致。
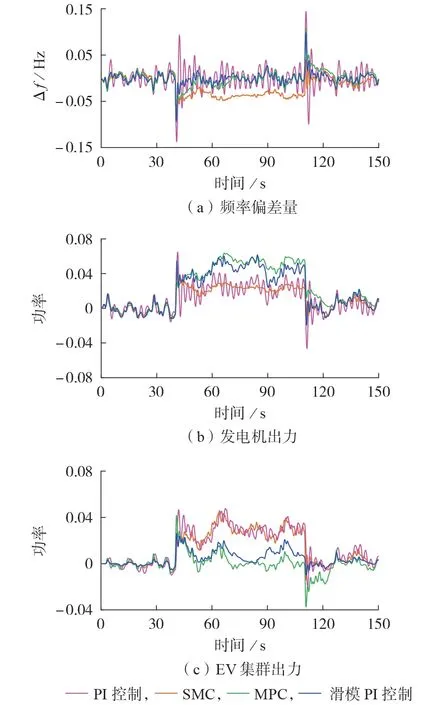
图3 发电机容量充足时的仿真结果Fig.3 Simulative results when generator capacity is sufficient
由图3(a)可知:在40 s时施加阶跃负荷扰动后,PI 控制、SMC、MPC 下的频率下降幅值分别达到0.137、0.086、0.088 Hz,而滑模PI 控制下的频率下降幅值为0.094 Hz;在(40,110) s 期间,相较于PI 控制和MPC,滑模PI 控制下的频率波动幅值小,收敛速度快;在阶跃负荷存在时,SMC下的频率波动偏差没有回到零值附近。由图3(b)可知:在发生阶跃负荷扰动时,发电机迅速调整输出功率,同时EV 集群在负荷突变的瞬间向电网供电,为发电机调频起到支撑作用。为了使EV 集群参与电网调频更具有经济性,当发电机功率能够满足负荷需求时,EV 集群出力逐渐减小,进行辅助调频。由图3(c)可知:相较于PI 控制、SMC,滑模PI 控制下的EV 集群出力明显减小;在110 s 时,与MPC 相比,滑模PI 控制下EV 集群出力的波动幅值较小,其与发电机出力之间的协调效果更好,此时充分利用了二者的输出功率。可见,在发电机容量充足的工况下,本文所提滑模PI 控制方法不仅能保证系统频率的稳定性,还可以使EV集群出力与发电机出力之间具有更好的协调性,避免浪费EV集群的输出功率,保证调频的经济性。
4.2 发电机容量不足的工况
当发电机容量不足以满足负荷需求时,超出发电机容量限制的负荷功率需由EV 集群承担。本文设置发电机的最大输出功率为15 MW,在3 个EV 集群全部参与辅助调频的情况下,施加图A3所示负荷扰动,频率偏差量及EV 集群控制信号如附录A 图A4 所示。由图可知:在40 s 发生阶跃负荷扰动和110 s 阶跃负荷扰动消失时,系统的频率偏差量和频率偏差量的变化率出现较大的波动,经过模糊优化算法后输出的信号Ufuzzy与Ufuzzy经过一阶滤波器后的可变系数β也相应的增大,最后可变系数β与控制信号Ue'共同导致EV 集群的控制信号Ue呈现增大或减小的趋势;在[19,27] s、[71,84] s等时段内,频率偏差量和频率偏差量的变化率波动较小,则可变系数β减小,EV 集群的控制信号Ue降低,最终EV 集群的出力减小。
当发电机容量不足时,发电机与EV集群的出力变化曲线如附录A 图A5 所示。从图中可知:在(0,40) s和(110,150) s时段内,发电机容量还未超出限制容量,所以随着负荷扰动的变化,可以通过调整发电机的输出功率来满足负荷需求,同时EV集群进行辅助调频以抑制频率波动;在(60,65)、(75,85) s 等时段内,由于负荷需求增加,发电机输出功率达到限值,改变发电机的输出功率已经不能满足负荷需求,所以需要增加EV 集群的输出功率来满足负荷需求并维持系统频率稳定;在(45,53)、(67,79) s 等时段内,负荷需求逐渐降低,EV 集群的输出功率也逐渐下降,系统通过调整发电机出力来调节系统频率使其稳定。
发电机容量不足工况下的频率偏差量变化曲线如附录A 图A6所示。可以看出,当发电机容量不足时,在本文所提滑模PI 控制方法下,EV 集群不仅可以满足系统的负荷需求,还能更好地与发电机协调进行系统频率调节,增大系统的调频容量。
4.3 联合优化仿真
在发电机容量充足的工况下,本文采用粒子群优化算法对3 个EV 集群的车辆投入比例参数进行优化。其中α、α、α取值均为0,α、α、α取值均为100 %。目标函数中的权重系数k1= 0.005、k2= 5 000。发电成本系数的取值参考文献[20],EV参与电网辅助调频的补偿单价参考文献[14]设定为210 元/(MW·h),单位电能折合的电池损耗费用率参考文献[21]设定为144 元/(MW·h)。优化前3 个EV 集群的车辆投入比例参数均设置为100 %。对3 个EV 集群的车辆投入比例参数进行优化,可得到私家车、公交车、出租车集群的车辆车辆投入比例分别为62.85 %、68.81 %、50.74 %。优化前、后系统的频率偏差量变化曲线以及发电机和EV 集群出力(标幺值)变化曲线分别如图4和图5所示。
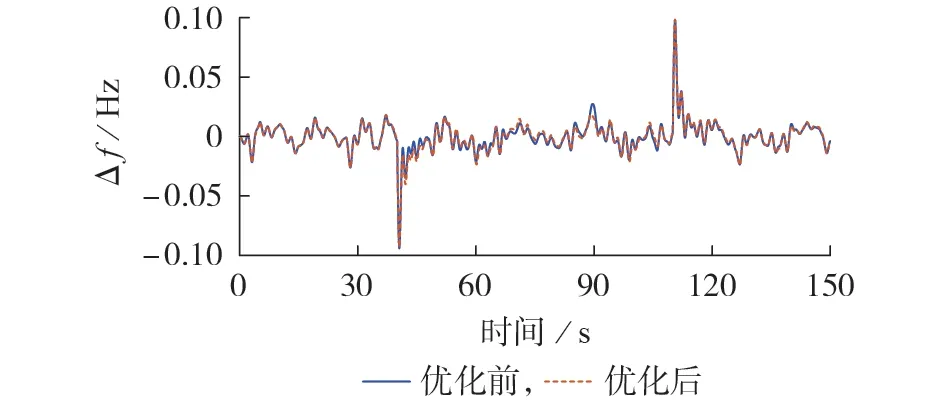
图4 优化前、后系统的频率偏差量变化曲线Fig.4 Frequency deviation curves before and after optimization

图5 优化前、后发电机和EV集群出力变化曲线Fig.5 Output variation curves of generator and EV cluster before and after optimization
由图4 可看出:优化前、后的系统频率变化相差不大,即能够在优化后保证系统频率稳定。由图5可看出:相较于优化前,系统在40 s发生阶跃负荷扰动后,优化后的EV 集群出力显著降低,同时发电机出力有所提高;在110 s 阶跃负荷扰动消失后,系统频率逐渐趋于稳定,EV集群出力趋于0,系统主要通过发电机出力进行频率调节。通过对EV 集群的车辆投入比例参数进行优化,可在满足系统频率稳定的同时,使EV集群的车辆投入数量和输出功率更少。
优化前、后指标结果对比如表1 所示。结合表1、图4 和图5 可知:相较于优化前,优化后系统频率稳定指标值Γ提高了2.37 %,系统稳定性并无明显下降;优化后EV 集群调频电量降低了51.35 %,即EV 集群出力显著降低;优化后系统辅助调频总成本降低了11.58 %。综上可见,减少EV 集群出力能够显著降低系统的调频成本。

表1 优化前、后指标结果对比Table 1 Comparison of index results before and after optimization
5 结论
本文针对EV 集群参与电网调频的效果与调频经济性问题,提出了基于滑模PI控制的发电机与EV集群出力联合优化方法,并对3 个EV 集群的车辆投入比例参数进行优化。仿真结果表明,在系统发电机容量充足与不足的工况下,滑模PI 控制下的系统频率稳定效果更好,EV 集群的输出功率更小。在本文所设置的工况下,考虑不同类型EV的动态特性和容量大小,对EV集群的车辆投入比例参数进行优化后,可得私家车、公交车、出租车集群的车辆投入比例分别为62.85 %、68.81 %、50.74 %。且相较于优化前,优化后EV 集群出力降低了51.35 %,频率波动指标提高了2.37 %,系统辅助调频总成本降低了11.58 %,即在频率稳定性无明显下降的前提下,EV集群的出力显著减少,系统调频成本降低。
附录见本刊网络版(http://www.epae.cn)。
