融合卷积注意力的激光同步定位与建图回环检测网络
2024-03-04姚万业杨振辉王祝
姚万业,杨振辉,王祝
融合卷积注意力的激光同步定位与建图回环检测网络
姚万业,杨振辉,王祝
(华北电力大学 自动化系,河北 保定 071003)
针对当前基于深度学习的回环检测方法应对反向循环时由于尺度变化和视角变化引发特征匹配准确度低的问题,提出一种使用卷积注意力增强的激光同步定位与建图回环检测网络(Convolutional attention,loop closure detection network,CA-LCDNet)。在构建局部描述符时,引入卷积注意力机制实现多尺度特征的有机融合,以增强适应性特征提取能力;用基于软分配聚类改进的NetVLAD(Network-based visual localization with attention to descriptors)对局部描述符进行高效的聚合,获得全局描述符。基于非平衡最优输运理论实现点云帧之间的特征匹配,计算两帧间的相对位姿。使用三元组损失训练全局描述符,实现准确的相对位姿误差估计。在公开数据集上进行对比试验,在正向循环中算法准确率达到92%,在反向循环中准确率达到40%。同时,相较于原Loop closure detection network(LCDNet)算法,改进算法得到的相对位姿误差取得了约5%的改善。
移动机器人;机器人导航;回环检测;卷积注意力;随机深度;深度学习
0 引言
回环检测是指在移动机器人的同步定位与建图(Simultaneous localization and mapping,SLAM)过程中[1],检测机器人是否到达已访问过的位置,以校正由于运动过程中的累积误差而导致的定位和地图构建的准确性下降。这项技术在机器人导航、自主探测和环境感知等领域具有广泛的应用价值[2]。
目前关于SLAM的研究主要包括视觉SLAM[3]和激光SLAM。激光雷达SLAM不依赖图像纹理或光照条件,具有更高的测距精度、更强的抗干扰能力以及更好的实时性[4]。
SLAM的回环检测算法包括基于手工特征的方法与基于深度学习的方法。
基于手工特征回环检测方法的原理是,通过比较当前扫描与先前扫描的描述符来识别回环,比如利用局部关键点[5]或全局手工描述符[6]等。然而,手工特征设计存在较高的主观性,并且在处理大规模数据时面临挑战;这些因素制约了基于手工特征的回环检测的能力。
用基于深度学习的回环检测方法可以提取到高维和高级特征,这使其在回环检测中表现出优异的性能。文献[7]将目标检测信息融入到词袋模型中,利用融合相似度来判断循环。文献[8]提出Scan context,利用扫描上下文实现场景识别,将环境信息编码为一个固定长度的上下文向量,使得点云数据的比较和匹配更为高效。
虽然深度学习方法通常比手工方法更快,但在处理反向循环时难以将当前点云与构建的地图对齐。文献[9]提出LCDNet,从多个方面考虑点云数据的特征提取和相似度计算,提高了回环检测和点云配准的性能,能够更好地处理反向循环。然而,该方法主要关注于单一尺度的特征提取,未充分考虑到点云数据的复杂几何结构。鉴于点云数据的多尺度特性,可以考虑引入多尺度卷积注意力机制[10],以增强特征提取的多尺度特征能力[11],从而提高回环检测的精度。
鉴于室外环境下激光雷达SLAM方法中存在位姿积累误差大、反向循环处理精度不高、特征提取能力不强的问题,本文提出了融合卷积注意力的激光SLAM回环检测网络:首先,通过优化点云处理和特征提取,获取具有高信息量的局部描述符;然后,引入卷积注意力机制增强特征提取的能力,使算法在突出局部特征和多尺度处理方面表现更出色;采用基于软分配聚类改进的NetVLAD[12]算法对局部描述符进行聚合,生成全局描述符,以有助于算法更灵活地处理样本在聚类簇之间的分布关系;最后,使用三元组损失对全局描述符进行训练,以提高相对位姿误差的估计准确度。
1 CA-LCDNet算法流程
CA-LCDNet算法流程如图1所示。

图1 CA-LCDNet算法流程
由图1可知,算法整体分为4个部分。
1)特征提取。神经网络引入卷积注意力模块到原有的卷积模块,实现对点云数据进行的特征提取、局部结构信息捕捉,得到局部描述符。
2)采用软分配聚类替代-means聚类方法的NetVLAD聚合局部描述符,得到全局描述符。用全局描述符捕捉点云的整体结构和结构信息,并将之用于网络训练。
3)基于非平衡最优输运理论(Unbalanced Optimal Transport,UOT)实现点云帧之间的特征匹配,计算两帧间的相对位姿。
4)通过三元组损失对全局描述符进行训练。
2 融入卷积注意力增强的特征提取
为了实现从点云数据中提取关键点特征,在PV-RCNN[13](Point voxel-region with convolutional neural network features)的基础上,使用卷积注意力机制替代传统卷积模块,并引入随机深度模块,以提高算法完成特征提取任务的能力。采用基于PointNet[14](Point network)的特征学习,通过集合抽象操作对点云的局部特征进行编码和聚合,生成局部描述符,实现关键点特征提取。特征提取的流程如图2所示。
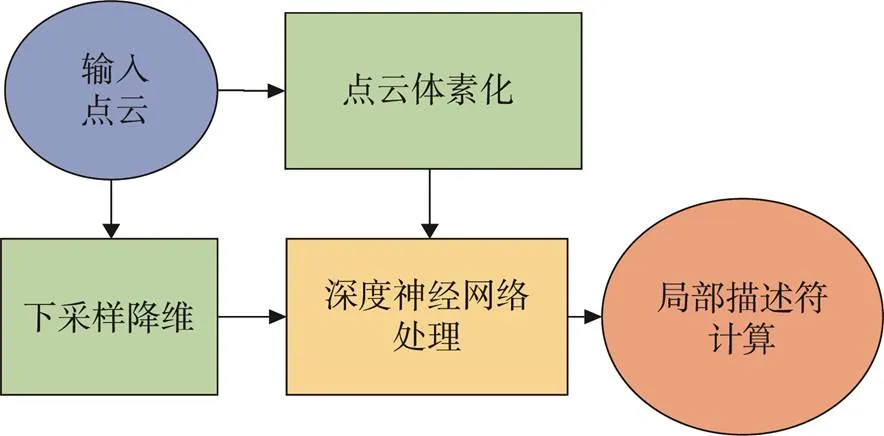
图2 特征提取流程
2.1 点云体素化模块
使用PV-RCNN将输入点云划分为空间分辨率为××的小体素。对于非空体素,采用逐点特征平均值计算的方法,将所有内部点的特征累加,进而得到该体素的特征表示。
2.2 下采样降维模块
首先,通过对点云数据进行密度降采样,提取个均匀分布的关键点,以保留关键结构并降低数据量。然后,采用最远点采样方法,从这个关键点中选择最远的点,以确保采样点的均匀分布。通过采用4个不同的下采样率,即1、2、4和8,来实现点云数据的高效压缩。
在下采样过程中,每个下采样率对应的稀疏特征量被视为一组特征向量。将这些特征向量从轴方向的8下采样率的3D特征图中垂直堆叠,并进行相应的转换,形成2D鸟瞰特征图。该操作的作用是在逐渐减小特征图尺寸的同时,不损失关键信息,为后续处理提供更高效的数据支持。
通过采用下采样策略,实现了细节保留与特征图尺寸逐步减小的双重目标。这样的流程确保了在数据处理过程中同时保证了降维和维持关键信息的有效性。
2.3 深度神经网络处理模块
提出了一种多尺度卷积注意力MSCA(Multi-scale convolutional attention)模块。用该模块可在卷积编码器环节实现多尺度特征提取,从而提升回环检测的准确性。
卷积编码器中,预处理后的点云将经过批量归一化和注意力模块的处理,从而得到具有规范化特征和强调关键信息的“点云表示”。然后,“点云表示”经过批量归一化和前馈神经网络的串行处理,在前馈神经网络生成中间特征。
回环检测在处理不同尺寸的图像过程中,通过将特征金字塔[15]与深度神经网络融合,使网络能够在多个尺度下提取关键特征。在此背景下,MSCA模块的引入加强了模型对多尺度信息的敏感性。多尺度特征提取的作用是将一组具有不同感受野的卷积层进行组合,并将这些感受野进行融合,从而提高深度神经网络的准确性和鲁棒性。
卷积编码器模块的组成如图3所示。
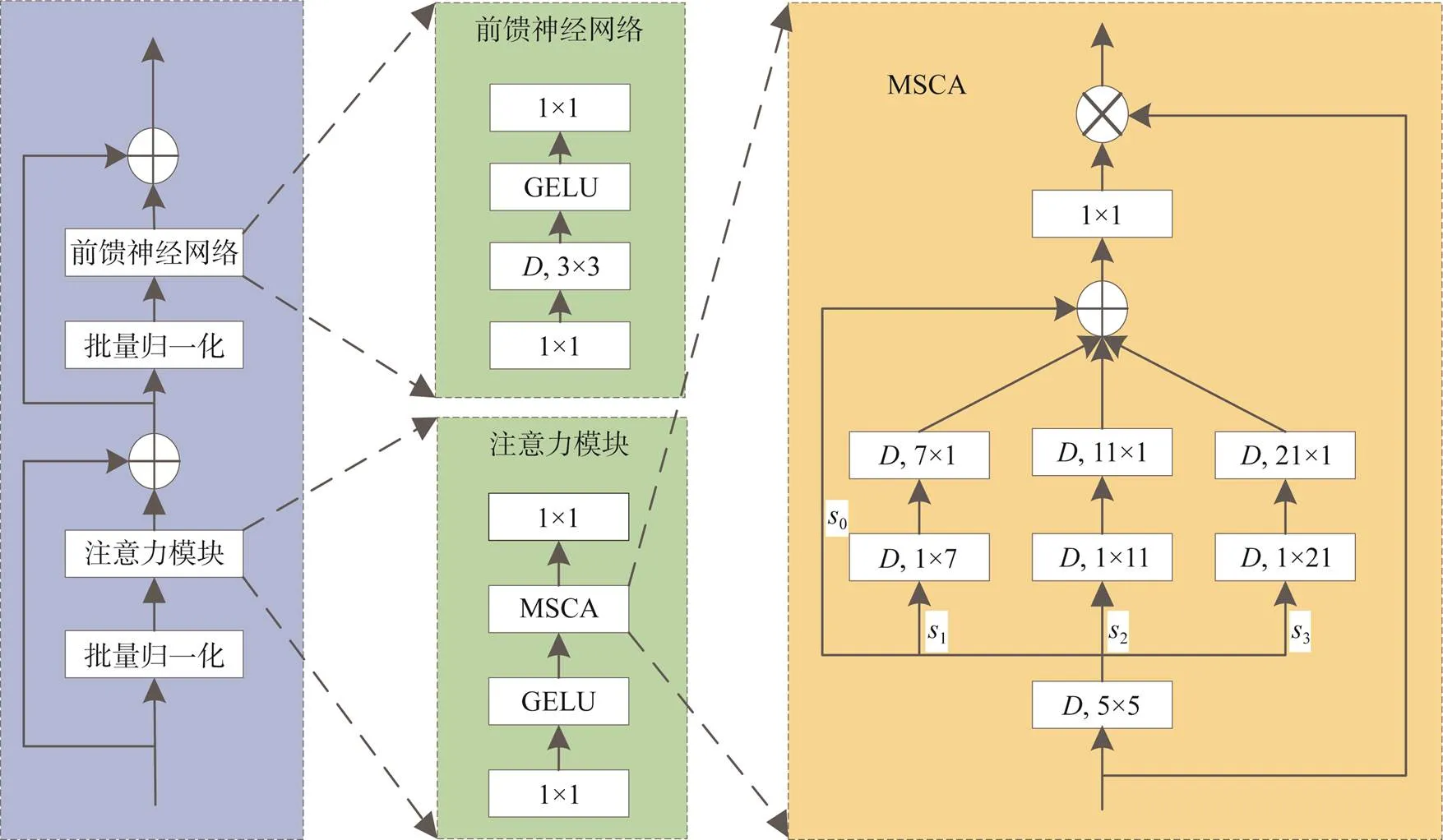
图3 卷积编码器模块
MSCA模块将卷积模块用于多尺度特征提取,将卷积输出作为注意力权重来动态加权MSCA模块的输入。
MSCA模块计算过程如式(1)和式(2)所示。

MSCA模块产生的权重用于调整特征金字塔中各个层次的特征表示,从而使神经网络更为聚焦于特定层级的信息。
采用PV-RCNN网络将金字塔特征图、2D鸟瞰特征图和输入点云聚合成一组包含个关键点特征的局部描述符。
对于每个选定的关键点和特性金字塔的每一层,使用式(3)计算关键点特征。




对输入原始点云以及2D鸟瞰特征图执行相同操作,产生聚合的局部描述符如式(6)。

最后,在聚合的局部描述符上使用多层感知机进行降维生成最终的局部描述符,如式(7)所示。

2.4 随机深度模块
为降低过拟合风险并提高模型的泛化能力,在深度神经网络的残差结构中引入随机深度模块[17]。随机深度通过概率性丢弃神经网络中的层,模拟训练过程中的随机连接和随机剪枝现象,从而减少网络复杂性和容量。
随机深度流程图如图4所示。
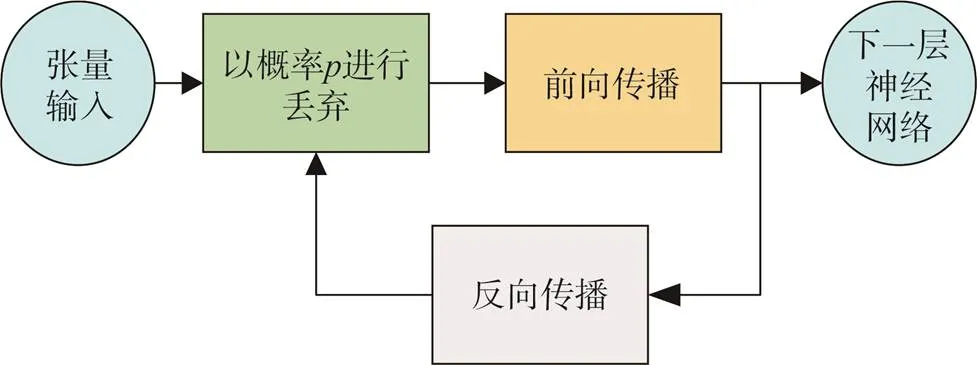
图4 随机深度流程
图4中,前一层神经网络的输出为张量。将张量输入随机深度函数中,其每一行元素以概率被随机删除。在该过程中,对于每个张量的每一行,随机深度函数决定是否以概率随机删除该行的元素。被保留的行继续参与前向传播和反向传播的计算。在前向传播中,输入数据被传递到下一层,而在反向传播过程中,这些保留的行参与梯度计算和参数更新。正则化的作用是通过引入额外的正则项对损失函数进行调整和优化,约束模型参数的取值范围,从而减少过拟合风险并提高模型的泛化能力。同时,用随机深度有效控制了模型的复杂性,使得模型具备更好的鲁棒性和泛化能力。
3 全局描述符计算
使用软分配聚类改进的NetVLAD,将特征提取过程获得的局部描述符聚合成全局描述符。全局描述符生成流程如图5所示。
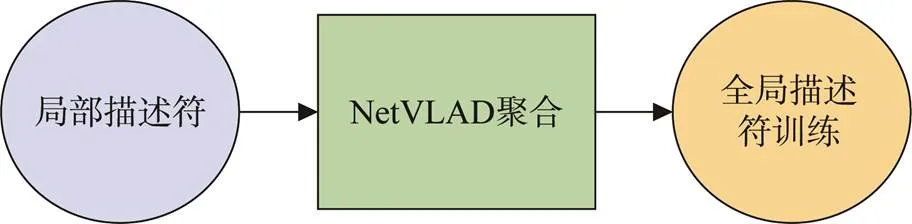
图5 全局描述符生成流程
在深度神经网络中,采用软分配聚类方法替代NetVLAD中的-means聚类方法。

软分配聚类方法属于聚类方法的一种,与-means硬聚类方法形成了对比。与硬聚类方法不同,在采用软分配聚类过程中,每个样本可以以一定的权重分布到不同的聚类簇,且不要求每个样本严格分配到一个确定的簇。
软分配定义为:

4 相对姿态估计
对此,将点云映射问题转换为最优输运问题,以寻找2个点云分布之间的最佳映射方式。Sinkhorn算法[19]是解决最优输运问题的迭代算法,其原理是通过交替更新联合概率分布的行和列,逐步找到最佳满足Kantorovich公式的运输方案。Kantorovich公式定义如式(10):
为一个联合概率分布,满足边缘约束:


在点云映射过程中,可能有一些点在源点云中存在但在目标点云中缺失或被遮挡。对此可以在最优运输问题的基础上引入非平衡约束条件,建立UOT问题。基于Sinkhorn算法,对原始最优输运问题的离散Kantorovich公式进行改进,引入熵正则化项和非平衡约束条件:


参数值和并非人工设定,而是通过反向传播算法进行学习调整。成本矩阵设置为关键点特征之间的余弦距离,如式(14)所示。

一旦神经网络训练完成,则采用基于随机抽样一致性(Random sample consensus,RANSAC)的配准方法替代之前的相对姿态估计模块。
配准是指对2个或多个数据集或图像的空间属性进行匹配或对齐的过程,其目的在于确定空间关系,在某种程度上实现数据集或图像的重叠或对齐。这一步骤旨在实现端到端的网络训练,覆盖从特征提取到特征匹配的整个过程。具体而言,在推断阶段,通过充分利用RANSAC的强大迭代过程,获取准确的相对姿态估计,从而替代了之前的相对姿态模块。这种方法可在实际应用中确保RANSAC优势的充分发挥,使算法获得更为精准的结果。
5 全局描述符训练

三元组损失定义如式(16)(17)所示。


式中:()为距离函数;为期望的分离阈值。


将上述3个公式进行线性组合后,得到的最终的损失函数为:

通过结合三元组损失、UOT和数据增强的方法以及反向传播,模型得以学习生成具有独特性和平移不变性的关键点特征。
6 仿真试验与分析
6.1 硬件平台和数据集
实验所用硬件配置为:处理器Intel(R)Core(TM)i9-11900K@3.50GHz,操作系统为Ubuntu20.04,显卡为NVIDIA GeForce RTX 3090,运行内存32 GB。
将各网络训练100个迭代轮次,每批样本的大小为12个。使用ADAM优化器来更新网络的权重。初始学习率为0.004,在第40和80轮迭代轮次后减半,权重衰减为5×10–6。设置关键点的数量为4 096,中间特征维数=640,输出特征维数=256,NetVLAD簇的数量为64,三元组余量为0.5。Sinkhorn算法的迭代次数设置为5。
选取KITTI(Karlsure Institute of Technology and Toyota Technoligical Institute)里程计数据集[21]和KITTI360里程计数据集[22]进行试验。
KITTI里程计数据集包括LiDAR点云和真实姿态的序列,使用SemanticKITTI数据集提供的地面真值进行对齐。序列01、02、03、04、05、09作为训练集,序列00、06、07、08作为验证集,其中序列08包含最多的反向循环。
KITTI360里程计数据集包含全景图像和全景激光雷达点云数据,还提供了更全面的环境感知信息。KITTI360里程计数据集比KITTI里程计数据集包含更多的正向循环和反向循环。以序列01、02、03、04、07、08作为训练集,序列00、05、06、09作为验证集,其中序列09包含最多的反向循环。
准确率和召回率是衡量回环检测模块中相似度检测算法性能的重要指标。在回环检测算法中首先需要保证较高的准确率,其次尽可能提高相似度检测模块的召回率。
表1示出了回环检测结果可能出现的4种情况。

表1 回环检测结果分类
统计表1中用回环检测算法在数据集中所得真阳性、假阳性、假阴性、真阴性结果出现的次数,并计算准确率和召回率。
6.2 对比试验结果

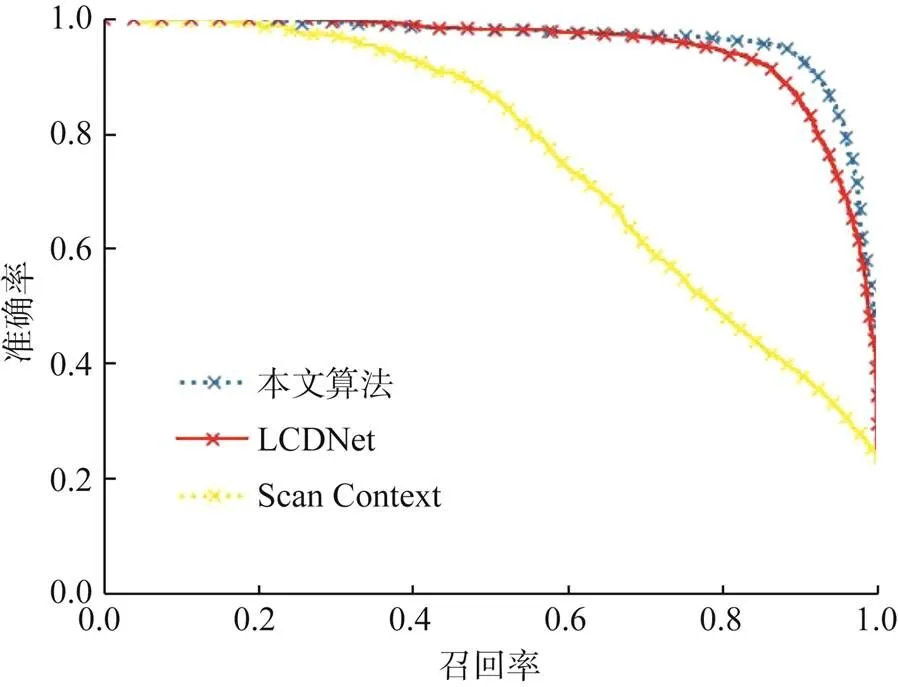
图6展示了本文算法与其他先进算法在公开数据集下的实验对比结果。由图6精度召回曲线观察到,在准确率为100%时,本文算法与其他先进算法相比提高了召回率;在召回率相同时,本文算法表现出更高的准确率。曲线下的面积反映了模型在精确性和召回率之间的权衡表现,即面积越大,意味着模型在这2个方面的综合效果越好,性能越出色。图6结果表明,本文算法的曲线下面积超过其他先进算法,说明在回环检测方面具有更高的精确性和召回率。
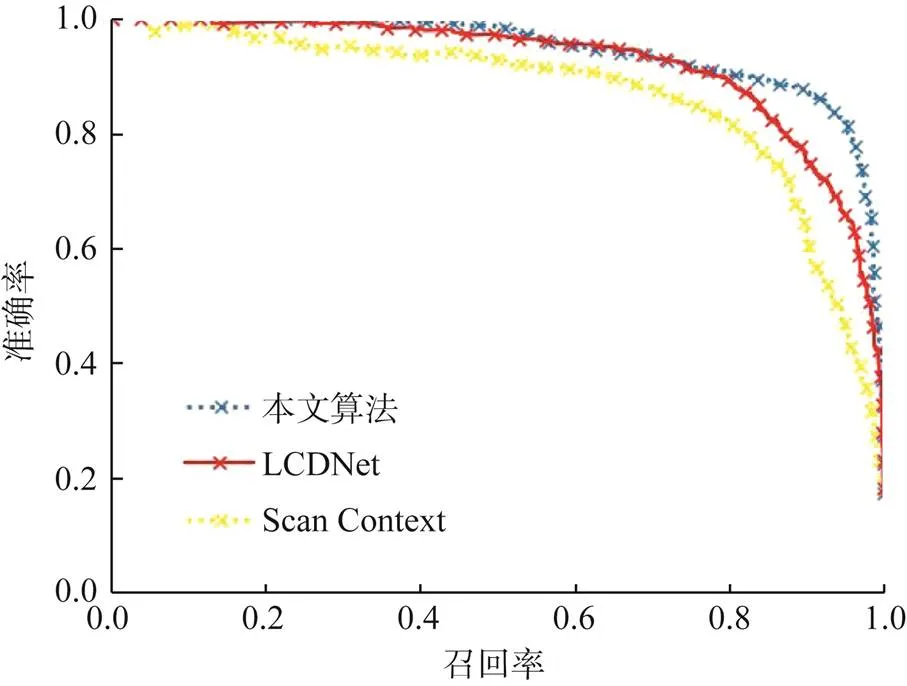
(a)KITTI数据集序列00
(b)KITTI数据集序列06

(c)KITTI数据集序列07
(d) KITTI数据集序列08

(e)KITTI360数据集序列00
(f)KITTI360数据集序列05
(g)KITTI360数据集序列06
(h)KITTI360数据集序列09
图6 KITTI和KITTI360数据集的精度召回曲线比较
Fig. 6 Comparison of the precision recall curves of the KITTI and KITTI360 datasets
表2给出了平均精度指标的统计结果。由表2可知,相较于LCDNet算法,本文算法在正向环路中精度由86%提升至92%,反向循环中精度由36%提升至40%。相较于Scan Context算法,本文算法在正向环路中精度由82%提升至92%,在反向环路中由25%提升至40%。
表2所示结果表明,本文算法在回环检测任务中表现出更出色的性能,能够更准确地预测目标。
回环检测在执行闭环校正和路径优化方面对相对位姿产生积极影响。完成率表示对齐任务成功对准特征点的百分比,用以量化对齐过程的效果。同时,通过检测回环事件并利用回环点位的相对位姿信息,可以有效校正路径中的漂移误差,提高机器人的定位准确性。因此,通过综合考量完成率、平移误差和旋转误差,能够对2个点云之间的相对位姿估计进行综合评估。

表2 KITTI和KITTI360数据集上平均精度比较
表3呈现了在公开数据集上进行实验的结果,涵盖了完成率、平移误差以及选择误差。由表3可知,相对于LCDNet算法,本文算法实现了约 7个百分点的匹配成功率提升,平移误差降低了约5%,而旋转误差降低了约5%。与Scan Context算法相比,本文算法实现了大约14个百分点的匹配成功率提升,平移误差降低了约44%,旋转误差则减少了约80%。该结果表明本文算法能够有效降低路径累积误差、提高定位准确性。
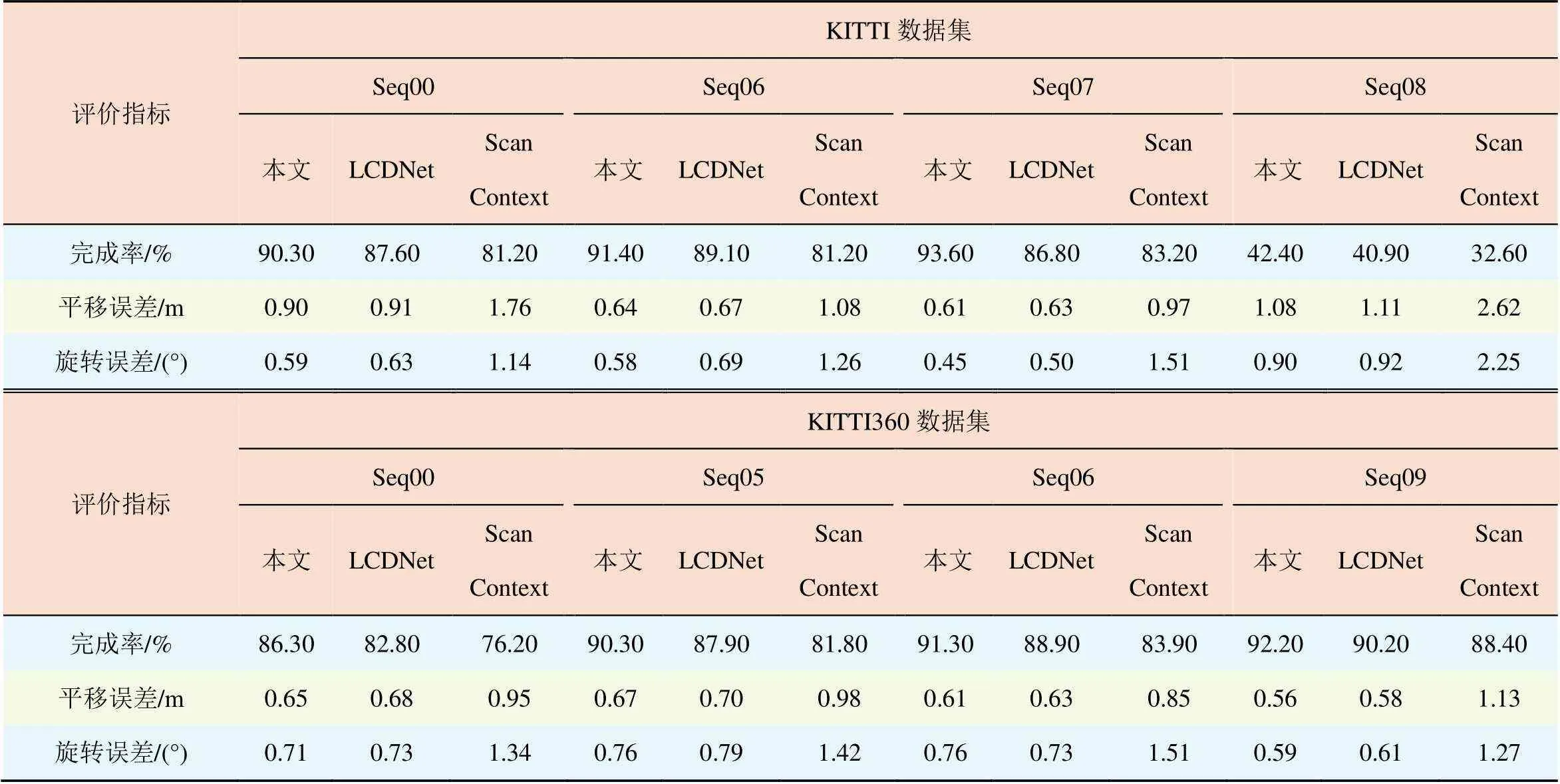
表3 KITTI和KITTI360数据集上正样本对的完成率和相对位姿误差比较
6.3 消融试验
对MSCA模块改进的特征提取和软分配聚类改进的NetVLAD进行消融试验。在KITTI数据集序列08上进行训练和评估,并使用平均精度、平移误差和旋转误差进行评估。
表4给出了对CA-LCDNet各个组件进行消融实验得到的结果。
由表4可知,完整的CA-LCDNet在性能上优于消融试验中的其他方法。MSCA模块、软分配聚类改进和UOT都对回环检测效果产生了积极的影响。MSCA模块增强了有价值的信息,同时削弱不太重要的点云像素作用。软分配聚类模块能够更灵活地处理数据点属于多个聚类的情况,从而减少模型复杂性。UOT模块有助于确定最佳的路径校正方法,维持路径的一致性和准确性。

表4 CA-LCDNet不同组件的消融试验
6.4 耗时分析
结合描述符提取、描述符比较和地图查询所需时间进行耗时性比较,将CA-LCDNet的运行时间与其他先进算法进行比较。
表5给出了回环检测各个任务所需要的时间。

表5 回环检测任务的耗时性分析
表5中,描述符提取时间包括了所需的预处理时间。描述符比较的含义是比较2个点云描述符所需的时间。在进行地图查询时,本文算法不需要额外的临时函数来比较描述符,而是利用高效的Faiss(Facebook AI similarity search)库进行相似性搜索来构建和查询地图。
表5实验数据表明,所采用算法展现出的整体执行时间较为紧凑,符合实时性的应用需求;算法在效率方面呈现优越性,显示出在给定任务背景下的高效处理能力。
7 结论
为提高特征提取能力以应对位姿累积误差大引起的定位漂移问题,提出了一种融合卷积注意力机制的激光SLAM回环检测网络。在公开数据集下进行仿真试验,得出以下结论:
1)通过引入融合卷积注意力机制的特征提取方法,获得了更出色的精度曲线和更低的相对位姿误差,有效提高了回环检测的准确性,生成了更加精确的地图。
2)消融实验结果显示,改进后的架构具备更强的鲁棒性,有效减少了误差积累,提高了地图的一致性。
展望:实验结果也表明,在激光点云存在部分重叠区域时,相对位姿误差仍存在,后续还需针对该问题开展进一步研究。
[1] 王金科, 左星星, 赵祥瑞, 等. 多源融合SLAM的现状与挑战[J]. 中国图象图形学报, 2022, 27(2): 368-389. WANG JINKE, ZUO XINGXING, ZHAO XIANGRUI, et al. Review of multi-source fusion SLAM: current status and challenges[J]. Journal of Image and Graphics, 2022, 27(2): 368-389(in Chinese).
[2] SAEEDI S, PAULL L, TRENTINI M, et al. Neural network-based multiple robot simultaneous localization and mapping[J]. IEEE Transactions on Neural Networks, 2011, 22(12): 2376-2387.
[3] 谢晓佳. 基于点线综合特征的双目视觉SLAM方法[D]. 杭州: 浙江大学, 2017. XIE XIAOJIA. Stereo visual SLAM using point and line features[D]. Hangzhou: Zhejiang University, 2017(in Chinese).
[4] 韩明瑞, 周波, 钱堃, 等. 基于激光雷达的室外移动机器人三维定位和建图[J]. 华中科技大学学报(自然科学版), 2015, 43(S1): 315-318. HAN MINGRUI, ZHOU BO, QIAN KUN, et al. 3D localization and mapping of outdoor mobile robots using a LIDAR[J]. Journal of Huazhong University of Science and Technology (Nature Science Edition), 2015, 43(S1): 315-318(in Chinese).
[5] BOSSE M, ZLOT R. Place recognition using keypoint voting in large 3D lidar datasets[C]//2013 IEEE International Conference on Robotics and Automation. Karlsruhe, Germany: IEEE, 2013: 2677-2684.
[6] HE L, WANG X, ZHANG H. M2DP: a novel 3D point cloud descriptor and its application in loop closure detection[C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Daejeon, Korea (South): IEEE, 2016: 231-237.
[7] HU M, LI S, WU J, et al. Loop closure detection for visual SLAM fusing semantic information[C]//2019 Chinese Control Conference (CCC). Guangzhou, China: IEEE, 2019: 4136-4141.
[8] KIM G, KIM A. Scan context: egocentric spatial descriptor for place recognition within 3d point cloud map[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, Spain: IEEE, 2018: 4802-4809.
[9] CATTANEO D, VAGHI M, VALADA A. Lcdnet: deep loop closure detection and point cloud registration for lidar slam[J]. IEEE Transactions on Robotics, 2022, 38(4): 2074-2093.
[10] GUO M H, LU C Z, HOU Q, et al. Segnext: rethinking convolutional attention design for semantic segmentation[J]. Advances in Neural Information Processing Systems, 2022, 35: 1140-1156.
[11] 仝卫国, 蔡猛, 庞雪纯, 等. 基于多尺度特征融合的超分辨率重建算法研究[J]. 科学技术与工程, 2022, 22(26): 11507-11514. TONG WEIGUO, CAI MENG, PANG XUECHUN, et al. Super-resolution reconstruction algorithm based on multi-scale feature fusion[J]. Science Technology and Engineering, 2022, 22(26): 11507-11514(in Chinese).
[12] ARANDJELOVIĆ R, GRONAT P, TORII A, et al. NetVLAD: CNN architecture for weakly supervised place recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 40(6): 1437-1451.
[13] SHI S, GUO C, JIANG L, et al. PV-RCNN: point-voxel feature set abstraction for 3d object detection[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, WA, USA: IEEE, 2020: 10526-10535.
[14] QI C R, SU H, MO K, et al. Pointnet: deep learning on point sets for 3d classification and segmentation[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Honolulu, HI, USA: IEEE, 2017: 77-85.
[15] LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Honolulu, HI, USA: IEEE, 2017: 936-944.
[16] LEE J, RO Y M. Dual-branch structured de-striping convolution network using parametric noise model[J]. IEEE Access, 2020, 8: 155519-155528.
[17] HUANG G, SUN Y, LIU Z, et al. Deep networks with stochastic depth[C]//Computer Vision–ECCV 2016. Cham, Germany: Springer International Publishing, 2016: 646-661.
[18] JÉGOU H, DOUZE M, SCHMID C, et al. Aggregating local descriptors into a compact image representation[C]//2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Francisco, CA, USA: IEEE, 2010: 3304-3311.
[19] CUTURI M. Sinkhorn distances: lightspeed computation of optimal transportation distances[J]. Advances in Neural Information Processing Systems, 2013, 26: 2292-2300.
[20] SCHROFF F, KALENICHENKO D, PHILBIN J. Facenet: a unified embedding for face recognition and clustering[C]//2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Boston, MA, USA: 2015: 815-823.
[21] GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? The KITTI vision benchmark suite[C]//2012 IEEE Conference on Computer Vision and Pattern Recognition. Providence, RI, USA: IEEE, 2012: 3354-3361.
[22] LIAO Y, XIE J, GEIGER A. KITTI-360: a novel dataset and benchmarks for urban scene understanding in 2D and 3D[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 45(3): 3292-3310.
Loop Closure Detection Network Fused with Convolutional Attention for Lidar SLAM
YAO Wanye, YANG Zhenhui, WANG Zhu
(Department of Automation, North China Electric Power University, Baoding 071003, China)
In order to solve the problem of low accuracy of feature matching caused by scale change and visual angle change when the current loop detection method based on deep learning responds to reverse loop, a loop closure detection network (CA-LCDNet) of lidar simultaneous localization and mapping (SLAM) using convolutional attention enhancement is proposed. When CA-LCDNet constructs local descriptors, it introduces convolution attention mechanism to realize organic fusion of multi-scale features and enhance adaptive feature extraction ability. Network-based visual localization with attention to descriptors (NetVLAD), which is based on soft allocation clustering, efficiently aggregates local descriptors to obtain global descriptors. Based on the unbalanced optimal transport theory, the feature matching between point cloud frames is realized, and the relative pose between two frames is calculated. An accurate estimation of relative pose error is realized by using the triplet loss training global descriptor. Compared with the open data set, the accuracy of the algorithm is 92% in forward loop and 40% in reverse loop. Compared with the original LCDNet algorithm, the improved algorithm can rectify the relative pose error by about 5%.
mobile robot; robot navigation; loop closure detection; convolution attention; random depth; deep learning
10.3969/j.ISSN.1672-0792.2024.02.006
TP391.9
A
1672-0792(2024)02-0050-11
国家自然科学基金资助项目(61903033,U21A20486);中央高校基本科研业务费专项资金资助项目(2020MS116)。
2023-10-02
姚万业(1965—),男,教授,研究方向为移动机器人自主导航控制;
杨振辉(1999—),男,硕士研究生,研究方向为深度学习、移动机器人导航与建图;
王祝(1991—),男,副教授,研究方向为机器人自主控制、多机器人协同。
王祝