一种分布式电推进飞机的多学科参数快速估计方法
2024-02-21于昊亮雷涛张星雨张晓斌
于昊亮,雷涛,张星雨,张晓斌
西北工业大学 飞机电推进技术工业和信息化部重点实验室,陕西 西安 710072
飞机电推进系统是指采用电能作为能量主体的飞机推进系统,包含全电、混合电推进技术和分布式电推进技术。电推进飞机所采用的能源形式有太阳光伏、燃料电池、蓄电池、油电混合等[1],推进方式有集中式和分布式,推进器有电动螺旋桨和涵道风扇。在飞机电推进技术的诸多概念中,分布式电推进(DEP)技术是目前的研究热点之一[2-3]。
近年来,随着分布式电推进概念的日益普及和应用于航空的推进电机技术的快速发展,出现了各种新的飞机概念设计方案。由于受到电源的能量密度等技术的限制,大部分都是中小型飞机的概念设计方案。分布式电推进技术可以应用于常规布局飞机(e-CTOL)、短距起降飞机(e-STOL),以及垂直起降飞机(e-VTOL)中,每一类飞机都面向不同的应用市场。
将分布式电推进技术应用到飞行器设计中,会使飞行器的气动特性与推进系统之间强烈耦合,需要从更多的角度挖掘出其气动—推进耦合特性。基于工程经验的飞机总体设计思路和气动设计分析方法不再适用于分布式电推进布局飞行器的早期设计。
国内外很多学者开展了分布式电推进飞机的相关研究。王科雷等[4]研究了太阳能无人机的分布式螺旋桨与机翼气动耦合特性,基于多参考系模型(MRF)求解雷诺平均方程(RANS),进行了高精度的准定常数值模拟,螺旋桨滑流使机翼升阻力增大、升阻比减小,并且可以延缓流动分离。杨小川等[5-6]基于激励盘理论,研究了分布式螺旋桨在多种不同的转向组合下,其滑流效应对机翼及整机气动特性的影响。杨伟等[7]采用激励盘模型及量子粒子群优化算法对考虑滑流影响下的分布式螺旋桨布局进行了气动优化设计研究,验证了此分析方法是可行且有工程利用价值的。饶崇等[8]对一种分布式电推进飞机的低速特性进行了数值求解,验证了滑流增升以及翼尖减阻的结论。成志勇等[9]基于涡格法建立了一种分布式电推进飞机的气动特性快速评估方法,并用高精度求解方法对其进行了验证。雷瑶等[10]推导了旋翼与机翼相互干扰时的气动模型,并通过对比数值模拟与风洞试验的结果得到了不同旋翼位置对DEP气动性能的影响。美国斯坦福大学使用Python语言搭建环境,并对分布式电推进飞机进行了分析[11]与优化[12]。马一元等基于一架装有24 个电动涵道风扇的分布式电推进无人验证机确立了一种分布式电推进飞机的总体设计方法[13]及多学科优化设计方法[14]。张星雨等对分布式电推进无人验证机依次开展了地面车载试验研究[15]及风洞试验研究[16],初步得到了一些分布式电推进飞机气动—推进耦合特性的基本规律。
目前,绝大多数对分布式电推进构型的研究集中在通过数值仿真或试验来研究气动—推进耦合特性上,还没有特别好的方法对分布式电推进飞机进行多学科参数快速估计。主要原因是分布式电推进构型复杂度高,涉及的参数比较多,常规的模型分析及优化设计方法需要的代价很大。因此,需要针对此问题发展快速有效的优化手段和设计工具。
针对上述问题,本文提出对分布式电推进飞机进行多学科参数快速估计的基本方法并搭建电动飞机多学科分析框架;建立螺旋桨—机翼简化气动分析模型,并与风洞试验结果进行对比验证;综合考虑气动—推进耦合特性及电推进系统的性能,以典型的分布式电推进飞机为例,进行多学科参数快速估计,分析整个飞行剖面下的飞机气动性能变化及电推进系统的性能变化。该方法适用于总体方案论证阶段。
1 电动飞机多学科分析框架
1.1 总体框架
电动飞机与常规飞行器最大的区别在于能源框架的不同,所以针对电动飞机,本文建立新的能源系统框架。电动飞机总体建模的框架如图1所示。
1.2 电推进系统的建模
为电动飞机提供动力的所有部件组合被称为飞机的电推进系统。全电飞机的能源系统框架比较简单,由电池、电机、电机调速器、螺旋桨组成[17]。其框架示意图如图2所示。图中绿色线表示电能,红色线表示机械能,电机将电能转化为机械能,并带动螺旋桨旋转。
1.2.1 锂离子电池放电模型
任何电推进系统的核心都是能源,可以是电池、燃料电池或通过发电机产生电能。对于典型的锂离子电池,采取基于经验的电池放电模型
式中,f表示电池放电程度的度量;x为电池的放电状态;R0为基准内阻;R为电池的内阻,随着电池的放电而发生变化;C为电池的放电倍率;I为电池的电流;Pdischarge为电池的放电功率。
1.2.2 电机模型
在飞机总体设计阶段,需要对电动通航飞机的全机性能进行分析,该阶段是对飞机的初步设计方案进行论证,故可以使用各部件简化的低阶模型,提高早期的设计迭代效率。可以将推进电机近似建模为无刷直流电机模型,并忽略温度等因素对电机性能的影响。本文采用一个经验修正的一阶模型来分析无刷直流电机的性能。该模型详细介绍了无刷直流电机的等效内部电路模型,如图3所示。
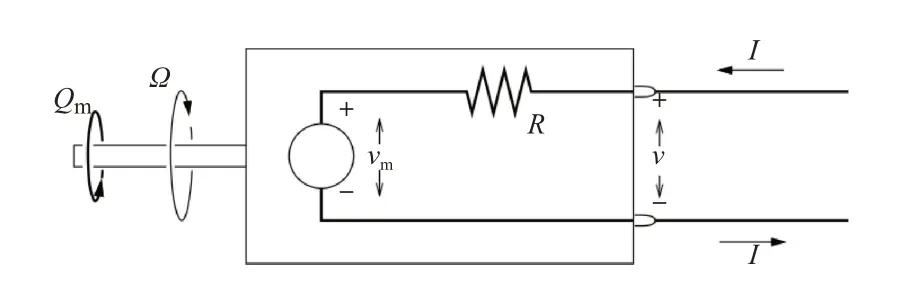
图3 直流电机的等效电路图Fig.3 Equivalent circuit for a DC electric motor
图3 中,Qm为电机的转矩;Ω为电机的转速;vm为电机内部的反电动势;R为电机的电阻;v为电机的端电压;I为通过的电流。
假设电机的电阻R是定值,轴扭矩与电流成线性关系
式中,KQ是电机的转矩常数。
假设电机内部的反电动势等于电机转速与电机速度常数之比,进而得到电机的端电压
根据上述公式,可以得到电机的电流i、转矩Qm、轴功率Pshaft及效率ηm,它们都是电机转速Ω和端电压v的函数
1.2.3 螺旋桨模型
螺旋桨的几何相对复杂,将一种螺旋桨快速最优设计方法[18]编写成螺旋桨设计函数,以达到快速建模及多学科参数估计的目的。在程序中输入螺旋桨的设计层面参数,进而得到螺旋桨沿半径的弦长分布和扭转分布,确定螺旋桨的几何模型,由此程序快速生成一个4叶螺旋桨,其三维模型在开源飞行器设计软件OpenVSP 中可视化,如图4所示。
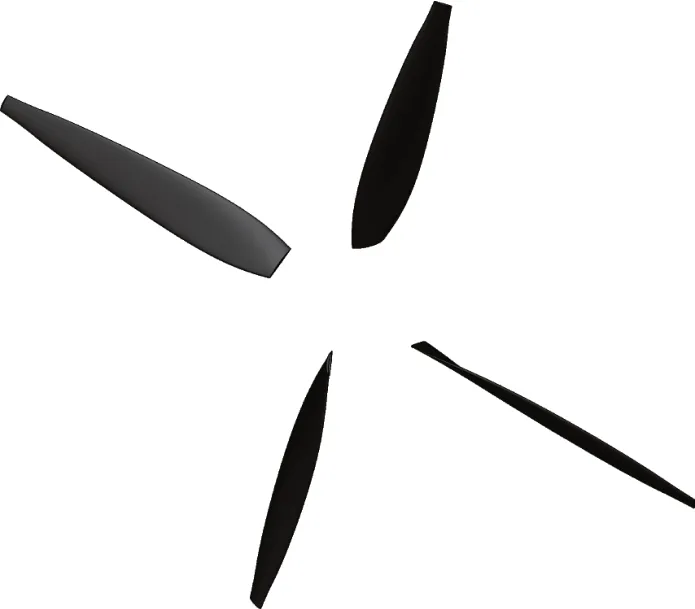
图4 螺旋桨模型在OpenVSP中可视化Fig.4 Propeller model displayed in OpenVSP
再使用叶素动量理论(BEM)来计算螺旋桨的性能参数,由于该方法的计算速度较快且满足一定精度,很适用于在飞行器总体设计阶段使用[19]。先求得不同站位叶素的推力和扭矩,再沿着径向进行积分,以获得螺旋桨的推力和扭矩,如式(11)和式(12)所示
1.3 飞行剖面任务段的建模
为分析电动飞机在整个飞行剖面上的性能,对飞行剖面各任务段进行建模。通过简化各任务段的飞行状态,分析飞机爬升、下降、巡航等飞行状态的性能,构建详细的飞行剖面图。
在总体设计阶段,考虑迭代效率,可以将飞行剖面简化为二维模型,在此基础上,基于飞行动力学基本原理完成整个飞行剖面的建模。
电动飞机的巡航阶段可以被简化建模为在恒定高度以恒定的速度飞行。巡航阶段的求解输入包括水平飞行速度、飞行高度、巡航的航程、飞机巡航的初始质量和初始时间,飞机巡航段的结束时间可以通过航程和速度来计算。
在巡航阶段中,可以假设飞机的加速度为零。在恒定高度下,基于上述输入,可以计算飞机在巡航条件下的升力、阻力及推力,并作为电推进系统性能评估的输入参数,形成完整的迭代求解。
电动飞机的爬升和下降阶段可以被简化建模为爬升率恒定的飞行阶段,飞机爬升时,爬升率为正数;飞机下降时,爬升率为负数。爬升和下降阶段的输入包括初始高度、结束高度、初始速度、结束速度和爬升率。而对于起飞和降落阶段,则需要考虑地面对飞机的支持力及摩擦力,再根据飞机的实时状态,建立力的平衡方程,形成完整的迭代求解。常规电动飞机的飞行剖面示意图及各任务段的具体含义分别如图5(1ft≈0.3048m)和表1所示。

表1 飞行剖面含义Table 1 Meaning of flight profile
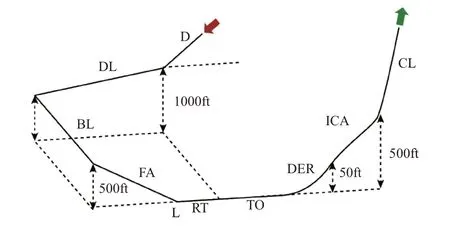
图5 典型的飞行剖面Fig.5 Typical flight profile
1.4 气动分析方法简述
螺旋桨与机翼的简化气动耦合特性分析模型由螺旋桨桨叶涡系、螺旋桨尾迹涡系、机翼翼面涡系及源汇系和机翼尾迹涡系4个基本模型叠加而成,见表2。

表2 螺旋桨/机翼的气动—推进耦合分析模型Table 2 Propeller/wing aero-propulsion coupling model
涡格法(VLM)则是升力面理论的数值解法。涡格法在求解这一类问题时具有较高的精度,同时计算的复杂性降低,大大减小了计算成本。
涡格法的数学本质为均匀流与三维涡线两种简单位势流的叠加,在满足亥姆霍兹定理的条件下,将机翼近似为一个曲面,将机翼沿展向和弦向进行离散,在构成的格子中布置马蹄涡,利用Biot-Savart 定律计算位于每个格子弦的控制点处的所有马蹄涡所诱导的速度,涡格法的示意图如图6所示,马蹄涡示意图如图7所示。
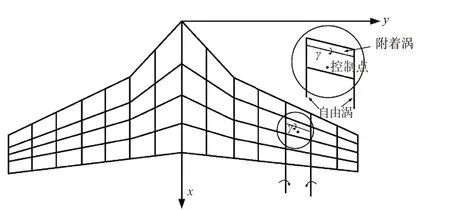
图6 涡格法原理示意图Fig.6 The principle of the vortex lattice method
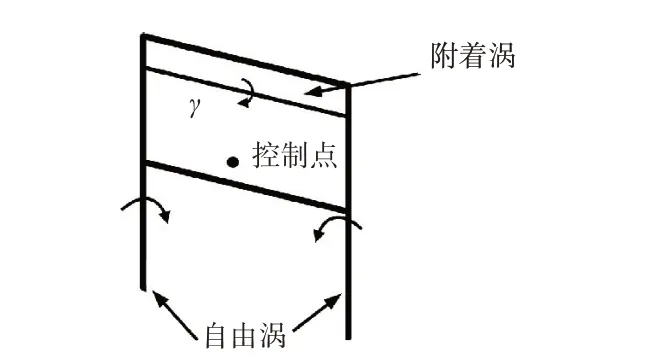
图7 马蹄涡示意图Fig.7 Horseshoe vortex diagram
对于螺旋桨,通过基于势流理论的螺旋尾流模型,将螺旋桨的尾流建模为涡环。涡环元素呈平面或四边形,由四面强度相同的边界涡丝组成。每个环引起的总速度可以用VLM中描述的方法计算,先计算4个单独的涡丝的影响,再进行叠加,可以得到一个涡环的诱导速度。从而可以进一步将涡环强度与机翼的离散马蹄涡进行叠加,可近似模拟螺旋桨滑流对机翼的影响。
在机翼第m个涡格控制点总的涡诱导速度vtotm满足
式中,vwingm为在此控制点的机翼马蹄涡的诱导速度,vwakem为在此控制点的螺旋桨尾流涡环的诱导速度。
式中,N为升力面上涡格的总数;Cm,n是影响系数矩阵,它取决于第n个马蹄涡的几何形状及其与第m个涡格的控制点的距离;Cr,t是基于初始条件构造的涡环系统的影响矩阵,取决于初始径向位置r和时间步长t。
2 快速气动评估方法的算例验证
为了验证所使用的简化气动模型的求解准确性,将简化方法得到的气动结果与风洞试验数据进行对比验证。
2.1 算例模型简述
本文以具有风洞试验数据的PROWIM 模型[20]作为算例进行方法验证。平直机翼的展弦比为5.33,翼型为NACA642-A015,半翼展长度为0.64m。螺旋桨具有4个桨叶,直径为0.236m,螺旋桨由短舱内的5.5kW 的电机驱动。模型的俯视图如图8所示。

图8 PROWIM模型俯视图及尺寸(单位:mm)Fig.8 PROWIM model top view and dimensions(Unit: mm)
气动分析的工况条件为:雷诺数Re= 8 × 105,自由来流马赫数Ma= 0.15。螺旋桨的前进比取0.81进行分析。
2.2 算例验证结果分析
简化的气动分析方法的分析结果与风洞试验得到的在不同迎角下的升力系数的数据对比如图9所示。

图9 简化分析结果与试验数据的对比Fig.9 Comparison of the results of the simplified analysis with the experimental data
3 全飞行剖面的多学科分析
基于前文建立的电推进飞机的多学科分析模型以及对简化的气动—推进耦合模型的算例验证结果,本节将在一个典型的飞行剖面下,对一架分布式电推进飞机进行多学科的参数快速估计。
建立如图10 所示的分布式电推进飞机,机翼为平直翼,翼展为9.6m,弦长为1.6m,展弦比为6,翼型为NACA2412,在机翼前缘安装8个分布式螺旋桨。飞行器的机身、垂尾和平尾的几何参数均与Tecnam P2006T 飞机保持一致。

图10 典型的分布式电推进飞机示意图Fig.10 A typical distributed electric propulsion aircraft
由于电动飞机在飞行过程中的重量不变,可以得到针对电动飞机航程R的近似估算方法[21]
式中,Ebat为电池的能量密度;mbat为电池质量;mtot为起飞质量;η为电源及推进系统的传动效率。
根据式(15),可以初步确定一些飞行器的总体参数。根据经验,初步可以取通用航空飞机的升阻比L/D= 14,电源及推进系统的传动效率η= 0.75,而近日宁德时代发布的凝聚态电池的单体能量密度可以达到500W·h/kg,故本文取锂离子电池电芯的能量密度为350W·h/kg,认为这是未来5 年可以达到的技术水准。需要注意的是,式(15)是在飞机巡航状态求得的航程估算公式,实际的航程会偏低一些,初步取R= 450km。
设定飞机的起飞质量为1500kg,则由式(13)可求得电池质量的500kg。表3 给出了飞行剖面各任务段的详细参数信息。
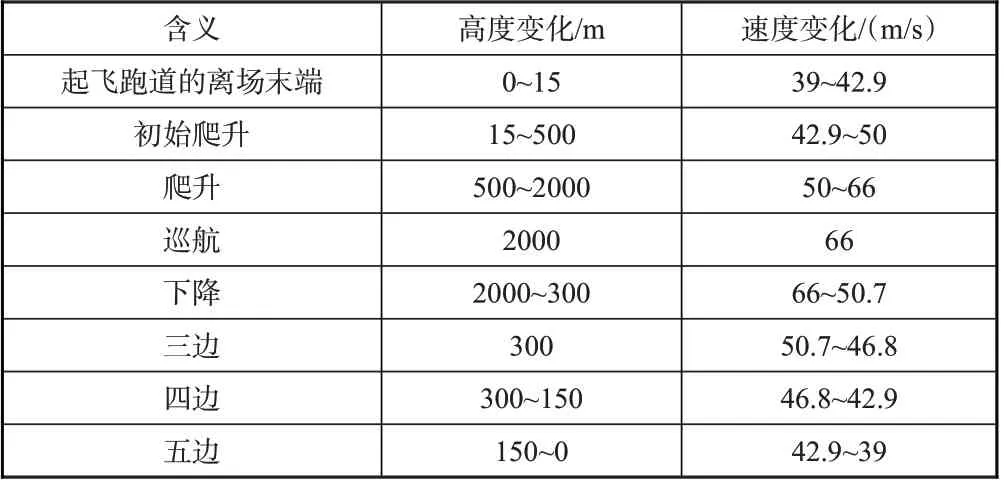
表3 飞行剖面各任务段的参数设置Table 3 Parameter settings of each segment of the flight profile
对其整个飞行剖面进行仿真,飞机的飞行高度随时间的变化曲线如图11 所示。在整个飞行剖面下的飞机飞行速度随时间的变化曲线如图12 所示。升阻比随时间的变化曲线如图13 所示,在巡航工况下,飞机全机的升阻比约为13.7,可以在飞行器的初步设计中将66m/s 作为远航速度,巡航迎角为4.6°。
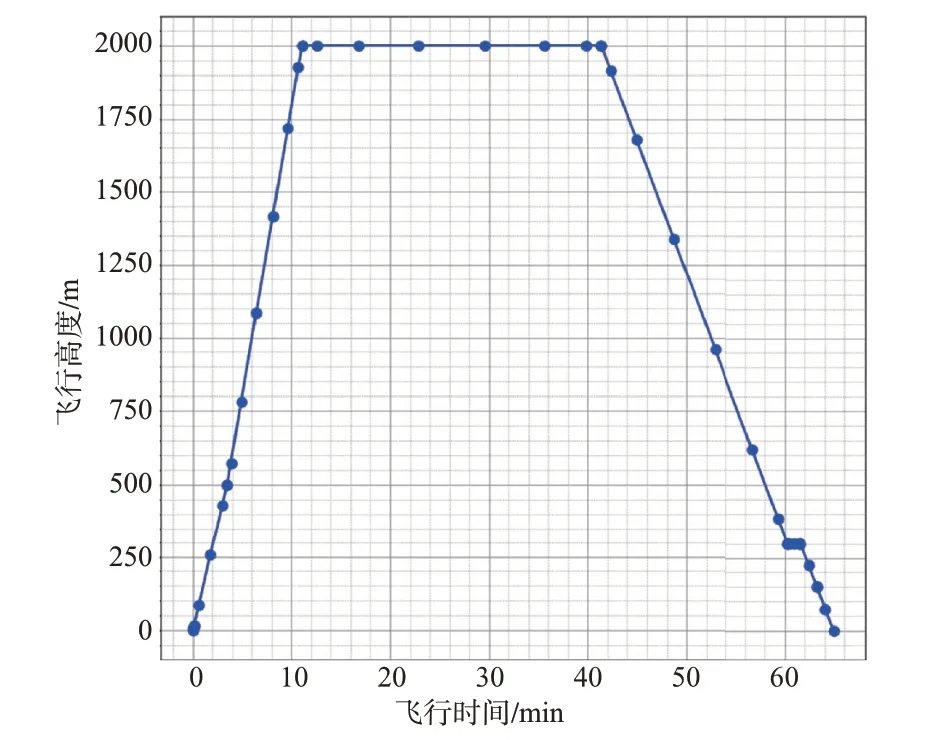
图11 飞机飞行高度随时间的变化曲线Fig.11 Curve of flight altitude over time
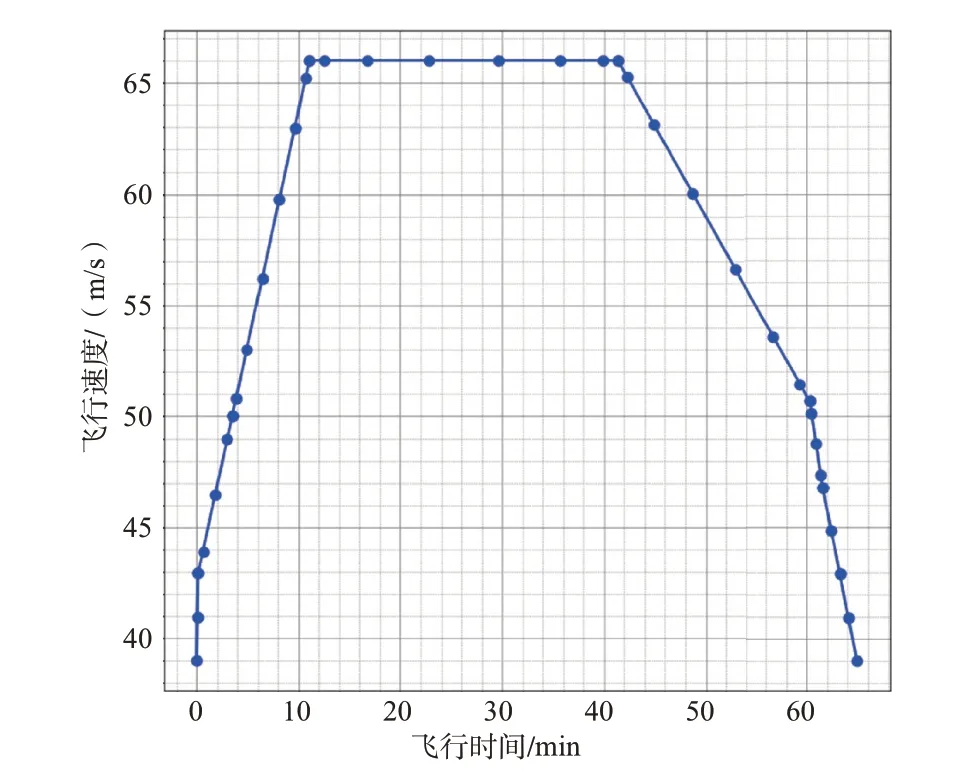
图12 飞机飞行速度随时间的变化曲线Fig.12 Curve of flight speed over time

图13 升阻比随时间的变化曲线Fig.13 Curve of lift-to-drag ratio changing with time
图14~图18 为螺旋桨和电机相关的性能分析结果,均在整个飞行剖面下进行分析。其中,图14为多个螺旋桨的总推力变化曲线,图15 为螺旋桨的转速变化曲线,图16 为螺旋桨的扭矩变化曲线,图17 为螺旋桨的效率曲线,图18为电机的效率曲线。从图中可以看出,在起飞和爬升状态时,螺旋桨的推力值较大,转速较高,扭矩值较大,螺旋桨效率和电机效率均较低;在巡航状态时,推力减小,转速稳定值略高于1080r/min,扭矩稳定值略高于90N·m,螺旋桨的效率约为0.85,电机效率约为0.95。
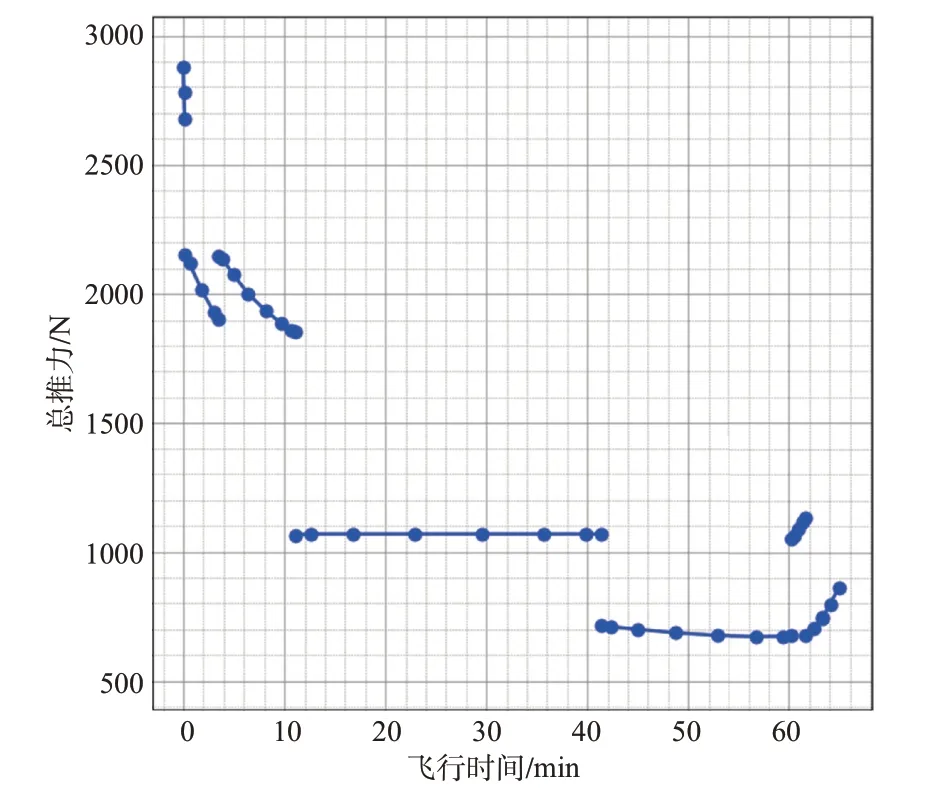
图14 多个螺旋桨的总推力变化曲线Fig.14 Total thrust curve of multiple propellers

图15 螺旋桨的转速变化曲线Fig.15 RPM curve of the propeller
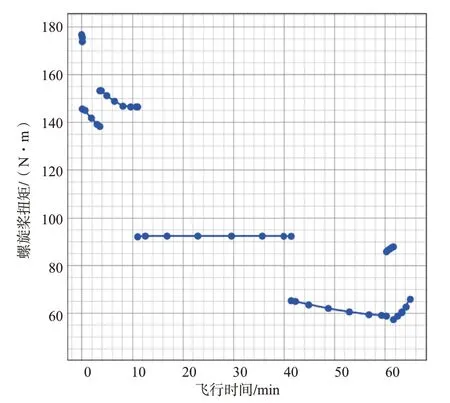
图16 螺旋桨的扭矩变化曲线Fig.16 Torque curve of the propeller

图17 螺旋桨效率曲线Fig.17 Propeller efficiency
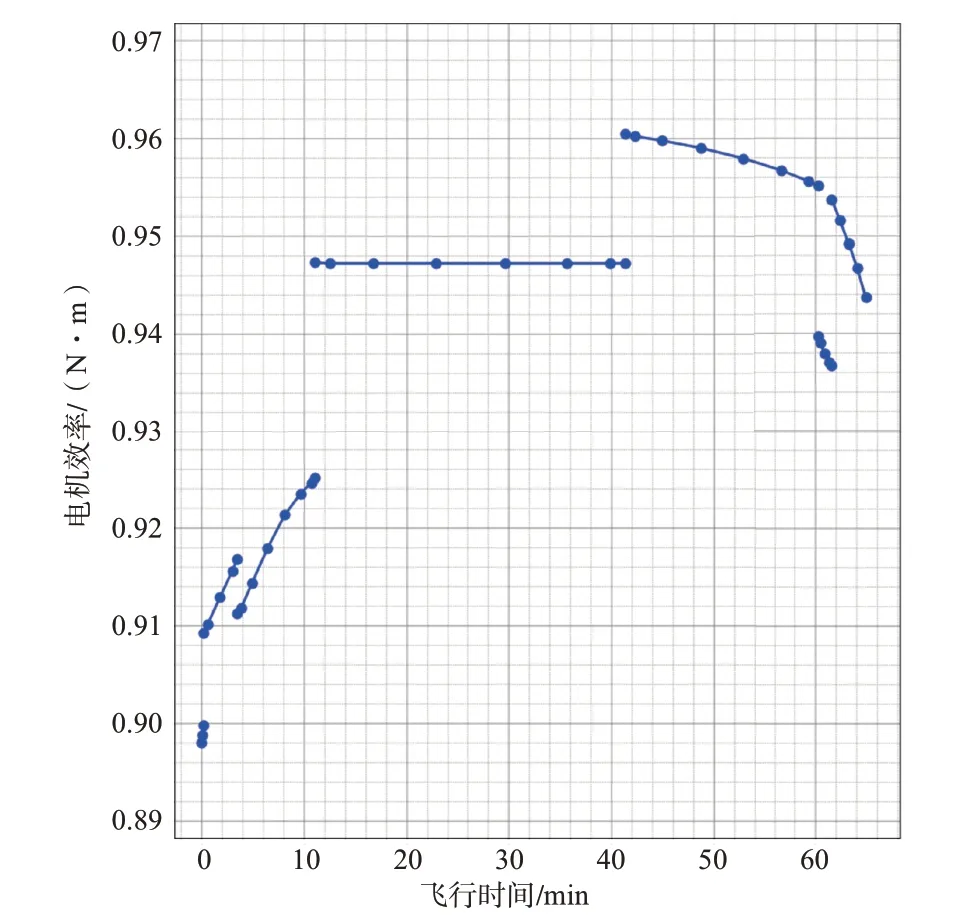
图18 电机效率曲线Fig.18 Motor efficiency
图19为电池的荷电状态(SOC)的变化曲线,电池的荷电状态是指电池中剩余电荷的可用状态。图20 为电池总能量的变化曲线,可以看出随着飞行时间的增加,电池的SOC值和总能量在逐渐降低。

图19 电池SOC变化曲线Fig.19 Curve of battery SOC change
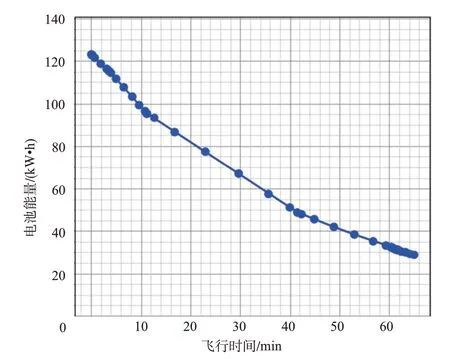
图20 电池总能量变化曲线Fig.20 Curve of battery total energy
图21 为电池的输出功率曲线,可以发现,输出功率高的阶段,所对应的图20 中能量变化曲线的斜率会相对较高。巡航条件下,输出功率大概在95kW左右。
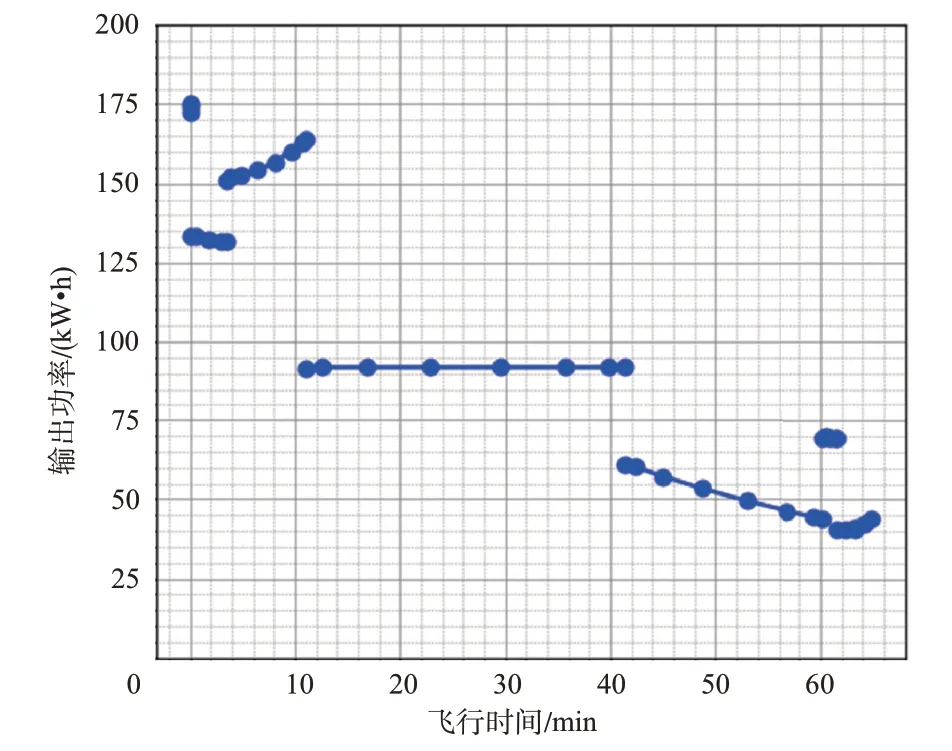
图21 电池的输出功率曲线Fig.21 Curve of battery output power
图22为电池的电压变化情况,图中红色曲线为开路的电压变化情况,作为电池性能分析的参考值,而蓝色曲线为带负载的电压变化,模拟真实负载的电池变化情况。由图22可以得出,在飞机最后着陆时,电池的电压会从一开始充满状态的500V 降至约454V,这些总体的电气性能参数将为后续的电推进系统的详细设计和优化提供参考。

图22 电池的电压变化曲线Fig.22 Curve of battery voltage
图23为电池的放电倍率变化曲线,图中红色曲线表示标称放电倍率变化情况,也是我们通常在选择电池型号时主要的参考依据;蓝色曲线表示瞬时放电倍率变化情况,由于电池的放电能力实际是随着SOC值的降低而降低的,瞬时放电倍率可以作为瞬时放电能力的一种衡量标准,用于确定预留的安全电量,以提高整个系统的安全性。

图23 电池放电倍率曲线Fig.23 Curve of battery C-Rate
4 结论
为了提高电动飞机在早期设计的效率,本文提出了一种分布式电推进飞机的多学科参数快速估计方法。通过研究,得出了以下结论:
(1)该方法对分布式电推进飞机进行总体框架搭建并初步建立了电推进系统模型,包括电池的放电模型、简单电机模型以及螺旋桨模型。
(2)基于势流理论,建立简化气动分析方法对螺旋桨与机翼的气动—推进耦合特性进行分析,并与风洞试验数据对比,验证了该方法的准确性。
(3)建立飞机的典型飞行剖面,并利用该方法对某分布式电推进飞机进行多学科参数快速估计,得到了整个飞行剖面下的飞机气动性能变化及能源系统的性能变化,验证了该方法的实用性。
由该方法可以快速地得出分布式电推进飞机的性能参数,并为下一步开展更精细的分布式电推进飞机供配电架构研究及优化设计奠定了研究基础。
