一种基于多目机器视觉技术的硅片搬运机构研究
2024-02-10邓乐,樊坤
邓 乐,樊 坤
(1. 长沙长泰机器人有限公司,长沙 410000;2. 中国电子科技集团公司第四十八研究所,长沙 410000)
0 引言
在太阳电池整个生产过程中,无论是采用发射极和背面钝化(PERC)工艺路线、隧穿氧化层钝化接触(TOPCon)工艺路线,还是采用异质结(HJT)工艺路线等,都需要经历多次的硅片上/下料。以采用HJT 工艺路线制备太阳电池为例,在其化学气相沉积(CVD)工艺制程中,硅片所覆膜层的厚度一般为5~10 nm,因此CVD 工艺制程后硅片的i 层、i/n 层、p 层都是极其脆弱的薄膜层。经过生产验证,CVD 工艺制程完成后,需在氮气氛围下,在30 min 内对硅片进行物理气相沉积(PVD)工艺制程,否则其表面易部分氧化生成二氧化硅,导致太阳电池的光电转换效率降低。因此,无论采用何种工艺路线,太阳电池的制备对生产环境及硅片搬运机构生产效率的要求很高。
硅片搬运机构上的托盘是进行CVD 和PVD工艺制程时常用的载具。为了保证硅片在CVD或PVD 工艺制程时保持位置固定,托盘上通常设有贴合硅片外形的沉台开口,因此硅片被硅片搬运机构搬运进沉台开口前需要进行精确定位。若硅片搬运进托盘沉台开口时,硅片边缘搭接在沉台开口边缘(即搭边不良),后续制程中将可能会产生绕镀、划痕等缺陷,导致硅片的良率大幅降低。
托盘沉台开口边缘与硅片下表面接触的面积越小,太阳电池背面掩膜(即硅片棱边附近的覆膜)的宽度越小,镀膜的有效面积越大,太阳电池的光电转换效率越高。因此,研究硅片搬运机构如何高精度、无损伤且快速地将硅片搬运进托盘沉台开口内具有重要意义。
在此背景下,本文研究了一种基于多目机器视觉技术的硅片搬运机构,该新型硅片搬运机构配合4 轴高精度微动平台及龙门机械手等部件,可快速地将CVD 工艺制程完成后的硅片搬运进PVD 工艺制程的托盘沉台开口内。通过对传统硅片搬运机构的机械结构和动作流程进行分析,指出其存在的不足,然后分析新型硅片搬运机构独特的动作流程、机械结构组成及特性,并重点分析新型硅片搬运机构使用多目机器视觉技术实现硅片位置检测及硅片搭边不良在线检测的原理,以及其应用优势。
1 传统的硅片搬运机构
1.1 传统硅片搬运机构的机械结构与动作流程
在传统硅片搬运机构中,需要自动上下料机构将硅片放入托盘内,托盘内硅片单边间隙最小为0.25 mm,而硅片经过皮带传输以后的定位精度为±1.00 mm,因此硅片需要进行二次定位。传统的硅片一次定位(即硅片矫正)、二次定位机械结构有很多种[1],其中某种硅片一次定位、二次定位机械结构示意图分别如图1[1]、图2[1]所示。

图1 传统的硅片一次定位机械结构示意图[1]Fig. 1 Schematic diagram of traditional mechanical structure for first positioning of silicon wafers[1]
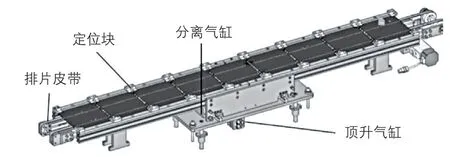
图2 传统的硅片二次定位机械结构示意图[1]Fig. 2 Schematic diagram of traditional mechanical structure for secondary positioning of silicon wafers[1]
传统的硅片搬运机构的动作流程[1]为:硅片在柔性传输带上排列完成后(即完成硅片一次定位),被顶升气缸驱动的定位块组件顶起,硅片自身的重力使其能沿着定位块内侧斜壁下滑并落入每组定位块内,实现硅片二次定位,一般定位精度可达到±0.20 mm。由于加工与装配均存在误差,且硅片自身尺寸也存在误差,导致10%左右的硅片放入托盘沉台开口时存在搭边不良现象。
在硅片二次定位的同时,托盘会被夹紧定位。当硅片二次定位完成后,多轴机械手利用无痕吸盘将硅片吸起,搬运至托盘的沉台开口内。传统的硅片搬运机构示意图如图3[2]所示。

图3 传统的硅片搬运机构示意图[2]Fig. 3 Schematic diagram of traditional silicon wafer handling mechanism[2]
1.2 传统硅片搬运机构的缺点
虽然传统的硅片搬运机构已在工业生产中被广泛采用,但其依然具有以下缺点[3]:
1)定位方式未实现硅片搭边不良的在线检测。搭边不良的硅片有可能成为失效片、低效片、隐裂片。
2)传输方式无法消除硅片搬运机构的累计误差。硅片在皮带线上完成二次定位后,定位精度为±0.20 mm。由于硅片搬运机构的装配与传输均存在误差,二者的累计误差至少为±0.10 mm,从而使整个硅片搬运机构的精度误差达到±0.30 mm。而硅片与托盘沉台开口边缘的单边最小间隙仅为0.25 mm,且由于托盘在工艺设备中受到高温加热,托盘沉台开口很容易向上凸起或向下凹陷变形,使托盘沉台开口与硅片之间的间隙会越来越小。因此在传统的硅片搬运机构中,将硅片搬运至托盘沉台开口内时,硅片极易与沉台开口边缘搭接,增大后续流程中硅片产生划伤与绕镀的风险。
3)硅片上的覆膜非常容易损坏,而传统的硅片搬运机构在搬运硅片进托盘沉台时,均采用吸盘吸取硅片,吸盘的负压有可能导致硅片产生吸盘印不良。
2 新型硅片搬运机构的动作流程
本文提出的基于多目机器视觉技术的硅片搬运机构的动作流程中,将平行于托盘传输线传输方向的托盘沉台称为列,共r列;垂直于托盘传输线传输方向的托盘沉台称为行,共m行。龙门机械手同时搬运n片硅片,该机构设有与列数对应的r个4 轴高精度微动平台(其中:平行于托盘传输线传输方向的轴为x轴,垂直于托盘传输线传输方向的轴为y轴;垂直于地面的轴为z轴;水平方向顺时针旋转的轴为θ轴)和r+1 个相机。龙门机械手每搬运1 次硅片,托盘就沿托盘传输线向前移动1 行,以便下次硅片搬运作业。该基于多目机器视觉技术的硅片搬运机构的具体动作流程图如图4 所示。

图4 基于多目机器视觉技术的硅片搬运机构的动作流程图Fig. 4 Action flowchart of silicon wafer handling mechanism based on multi camera machine vision technology
3 基于多目机器视觉技术的硅片搬运机构的机械结构
基于多目机器视觉技术的硅片搬运机构的整体机械结构包括:多目机器视觉系统、龙门机械手、硅片传输线、托盘传输线、微动平台等。其中,龙门机械手、硅片传输线、托盘传输线和微动平台上下依次布置;托盘传输线和硅片传输线垂直布置,具体如图5 所示。需要说明的是,为了便于观看,图中机械结构隐藏了部分机架。
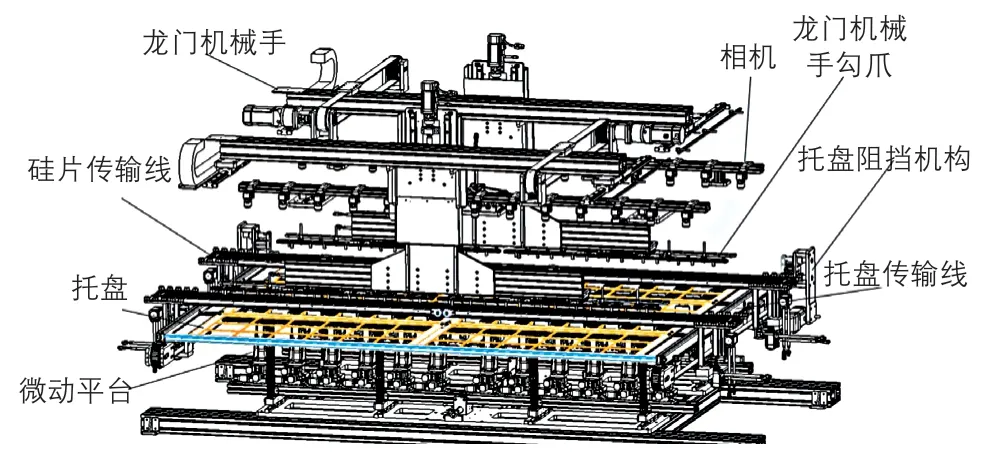
图5 基于多目机器视觉技术的硅片搬运机构的整体机械结构示意图Fig. 5 Schematic diagram of overall mechanical structure of silicon wafer handling mechanism based on multi camera machine vision technology
基于多目机器视觉技术的硅片搬运机构具有以下特性:
1)效率方面。本机构采用模块化设计,硅片传输线和托盘传输线为垂直布置,因此可设置多套硅片传输线、龙门机械手、多目机器视觉系统、4 轴高精度微动平台等,从而实现硅片搬运效率的翻倍提升。例如图5 中,使用了两套龙门机械手、2r个4 轴高精度微动平台和2r+2 个相机,将硅片搬运效率提升了1 倍。若继续增加龙门机械手的数量,硅片搬运效率还可以进一步提升。
2)精度方面。本机构的动作流程中,首先由龙门机械手抓取硅片传输线上的硅片运送到微动平台(即托盘沉台开口),再使用多目机器视觉系统和微动平台配合调整硅片位置,因此无需考虑龙门机械手搬运硅片的误差。
3)产品质量方面。龙门机械手并未使用吸盘,而是采用了两排非金属材料的勾爪来夹取硅片,从根本上避免了吸盘印的产生。
4)功能方面。采用多目机器视觉系统后,增加了硅片搭边不良的在线检测功能。
4 多目机器视觉系统的检测原理
4.1 位置检测
本文提出的基于多目机器视觉技术的硅片搬运机构中,托盘、相机、微动平台、背光源的布局俯视图如图6 所示。托盘沉台开口承托硅片的边沿单边宽度只有0.75 mm(即图6 中的黄色部分);托盘沉台中间为镂空结构。
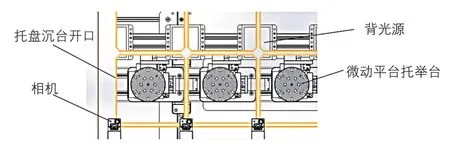
图6 托盘、相机、微动平台、背光源的布局俯视图Fig. 6 Top view of layout of tray,camera, micro motion platform,and backlight source
当托盘停止运动后,相机位于托盘沉台的边角正上方,微动平台位于托盘沉台开口的正下方;此时相机进行第1 次拍照,记录托盘沉台开口的位置和角度信息。微动平台的z轴上升,其托举台穿过托盘沉台网框的镂空孔,上升到高于托盘沉台开口一定高度的位置。龙门机械手先将硅片搬运到微动平台托举台上表面的吸附板上,真空发生器开启负压,吸附板将硅片轻微吸紧,防止硅片移动;此时相机进行第2 次拍照,记录硅片与托盘沉台开口的位置和角度信息。调整微动平台θ轴、x轴和y轴位置来进行硅片角度及位置偏移校准。当微动平台完成第1 次偏移校准后,相机进行第3 次拍照,再次进行x轴、y轴、θ轴校准,以便提高放片精度。硅片角度和位置调整完成后,真空发生器破真空,硅片脱离微动平台托举台上表面的吸附板,微动平台的z轴下降,硅片转移至托盘沉台内。
为了降低硬件成本和提高拍照精度,多目机器视觉系统采用小视野拍照。因为同等像素下,通过调节矩阵相机的焦距来调整拍照视野,拍照视野越小,精度越高。除了托盘两侧的相机,每个相机同时拍摄两个托盘沉台开口和相应的硅片的边角;根据两个相机拍摄得到的信息,通过耦合算法,计算出硅片3 条边与托盘沉台开口3 条边的相对位置。本机构通过在硅片的边上和托盘沉台开口的边上各取数个点,进行多次直线插补运算,以提高多目机器视觉系统的测量精度。针对1 片硅片而言,硅片位置及角度调整示意图如图7 所示。图中:A、B分别代表相机1、相机2 拍摄的需要偏移校准的角度值;C、D和E、F分别为设置在硅片和托盘沉台角上的标记点;x1、x2均表示微动平台的x轴方向要调整的距离;y1、y2均表示微动平台的y轴方向要调整的距离。

图7 硅片位置及角度调整示意图Fig. 7 Schematic diagram of silicon wafer position and angle adjustment
虽然理论上相机1 拍摄到的角度A和相机2 拍摄到的角度B相等,但是由于托盘沉台可能存在变形,因此微动平台θ轴的实际调整角度θa的计算式为:
同理,微动平台x轴的实际调整距离xa的计算式为:
微动平台y轴的实际调整距离ya的计算式为:
采用此算法后再进行调整能增加托盘的使用寿命,降低生产成本。
4.2 硅片搭边不良在线检测
基于多目机器视觉技术的硅片搬运机构采用先搬运硅片再调整硅片位置的独特动作流程,在搬运硅片过程中,产生硅片搭边不良的可能性极低。通过客户的PVD 自动化设备的实际生产对该机构的硅片搭边不良情况进行了验证,结果显示,该机构的搭边不良率小于0.1%,达到了国内领先水平。
当硅片放入托盘沉台开口内后,相机将第4次拍照,检测托盘上是否有搭边不良的硅片。由于新型硅片搬运机构在x轴和y轴方向上的硅片搭边不良在线检测的原理基本相同,所以本文以x轴为例进行说明。
该新型硅片搬运机构的所有相机均安装在同一高度,且相机之间的间距相等且已知,间距设为L,位于相邻两个托盘沉台连接线中心上方的相机1、相机2 的中心坐标分别为(xc1,yc1)、(xc2,yc2)。此外,硅片边长最大允许尺寸为Xmax,最小允许尺寸为Xmin。多目机器视觉系统在相机第4 次拍照后测量得出硅片左边缘和右边缘的x轴坐标分别为xgl、xgr(对应的y轴坐标分别为ygl、ygr),而相机在第1 次拍照时已记录得到的托盘沉台开口左、右限位x轴坐标分别为xtl、xtr(对应的y轴坐标分别为ytl、ytr)。硅片搭边不良在线检测示意图如图8 所示。

图8 硅片搭边不良在线检测示意图Fig. 8 Schematic diagram of online detection of poor silicon wafer edging
由此可以得到:
托盘沉台的设计宽度限定条件为:
若相机第1 次拍照时,出现xtr-xtl<Xmax+0.5,则会出现托盘需要维护的报警。
在未出现硅片搭边不良,且托盘和硅片的尺寸满足设计与质检要求的情况下,以下条件将得到满足:
使用逻辑“或”判定是否存在硅片搭边不良,以下条件满足任意1 个即判断为硅片搭边不良:
1)xgl<xtl,为左侧搭边不良;
2)xgr>xtr,为右侧搭边不良;
3)xgr-xgl<Xmin。
4.3 基于多目机器视觉技术的硅片搬运机构的应用优势
在硅片变薄的发展趋势下,基于多目机器视觉技术的硅片搬运机构的设计使其具有很大的应用优势,原因在于:
1)在新型硅片搬运机构中,硅片在放入托盘沉台前,平放在微动平台托举台上,硅片的受力面积较大,变形很小;而传统的硅片搬运机构采用吸盘吸取硅片,硅片的受力面积较小,变形较大,因此产生硅片搭边不良的概率更高。
2)本新型硅片搬运机构采用多目机器视觉技术与微动平台配合进行硅片定位,不会对硅片产生使其受力变形的侧向力;而传统的硅片搬运机构采用导轮与定位块进行硅片定位,均会对硅片产生侧向力,硅片可能变形,导致定位精度下降。
3)本新型硅片搬运机构中,当硅片的厚度很小时,将增加硅片变形修正值P(其取值可从生产经验中得到),即当xgr-xgl<Xmin-P时,可判断为硅片搭边不良。这是因为硅片很薄,托盘沉台开口深度很浅,即使硅片搭边,硅片与水平面之间的倾角也非常小;并且由于托盘沉台中间是大面积镂空结构,因此无论是否有硅片搭边不良,托盘沉台与硅片的接触面积都很小。硅片搭边不良与硅片正确地放在托盘沉台开口内时硅片的变形量几乎相等,此时需增加硅片变形修正值以帮助判断是否存在硅片搭边不良。
4)本新型硅片搬运机构有利于减小太阳电池背面掩膜宽度,增加了太阳电池的有效吸光面积,从而可提高其光电转换效率。
5 结论
太阳电池产业最大的竞争就是成本的竞争。更高的原材料利用率,更高的太阳电池生产效率才能让光伏产业在国家新能源战略中占据更高的位置。本文研究了一种基于多目机器视觉技术的硅片搬运机构,在分析传统硅片搬运机构的机械结构和动作流程的基础上,对该新型硅片搬运机构独特的动作流程、机械结构及特性进行了介绍,并重点分析了其使用多目机器视觉技术实现硅片位置检测及硅片搭边不良在线检测的原理。本机构的创新性在于引入了多目机器视觉技术和独特的动作流程,从而解决了硅片搬运过程中可能产生吸盘印、划伤、隐裂等缺陷的问题。采用高精度多目机器视觉系统的硅片搬运机构有利于减小太阳电池背面掩膜宽度,增加太阳电池的有效吸光面积,从而可提高其光电转换效率。