基于模糊变结构补偿的机械臂运动路径避障规划算法
2024-02-06李井林
李井林
(江苏联合职业技术学院苏州工业园区分院,江苏 苏州 215123)
工业机器人作为高端机械装置,可应用于实际工业生产,提升生产效率[1]。随着人工智能领域技术的进步,大量程序、算法被用于机械臂的设计与制造,从而有效地降低了复杂程度,缩减了生产监测领域的人工成本[2]。机械臂本身具备的自由度特性能够保证机械臂在不同环境中高效地完成任务,但是环境的复杂性会给机械臂操作带来难度,有效地对机械臂路径进行避障规划就成为机械臂操作过程中最为重要的一个环节[3]。
文献[4]提出基于单目视觉的多种群粒子群机械臂路径规划算法,通过模型位置估计法获取目标位置,利用粒子群算法计算目标位置向量,获取机械臂的最优运动角度,实现路径的避障规划。该算法由于未能在路径规划前对机械臂进行具体的动力学分析,因此该算法的路径规划效果差。文献[5]提出基于碰撞检测的空间冗余机械臂避障路径规划,该算法通过对机械臂空间占位关系的描述,判断机械臂运动轨迹与球体之间是否存在障碍;通过粒子群算法对目标函数进行求解,获取机械臂最佳运动轨迹,实现机械臂的路径规划。但是该算法在建立位姿扰动函数时存在问题,因此该算法规划的路径较长。文献[6]提出基于改进的RRT*-connect算法的机械臂路径规划,首先通过梯度下降法对搜索路径进行优化,然后通过优化结果实现目标路径的规划。因为该算法在搜索目标路径时存在误差,所以该算法的路径规划时间较长。
为解决上述机械臂避障路径规划过程中存在的问题,本文提出了基于模糊变结构补偿的机械臂运动路径避障规划算法。
1 机械臂模糊力矩控制方法
1.1 机械臂动力学分析
设定机械臂移动坐标为Q(x,y),关节连接点分别为O、A、B,运动角度为θ,以此建立机械臂的运动模型:
M=OθiAθiBθi/Q(xi,yi)
(1)
式中:M为建立的机械臂运动模型,Oθi、Aθi、Bθi为关节连接点运动角度。
基于建立的机械臂运动模型,假设机械臂运动的位置表示为ω(t),使用拉格朗日方程[7]对机械臂进行动力学分析:
(2)

设定机械臂连杆长度为C1、C2、C3,质点为z1、z2、z3,具体结构如图1所示。
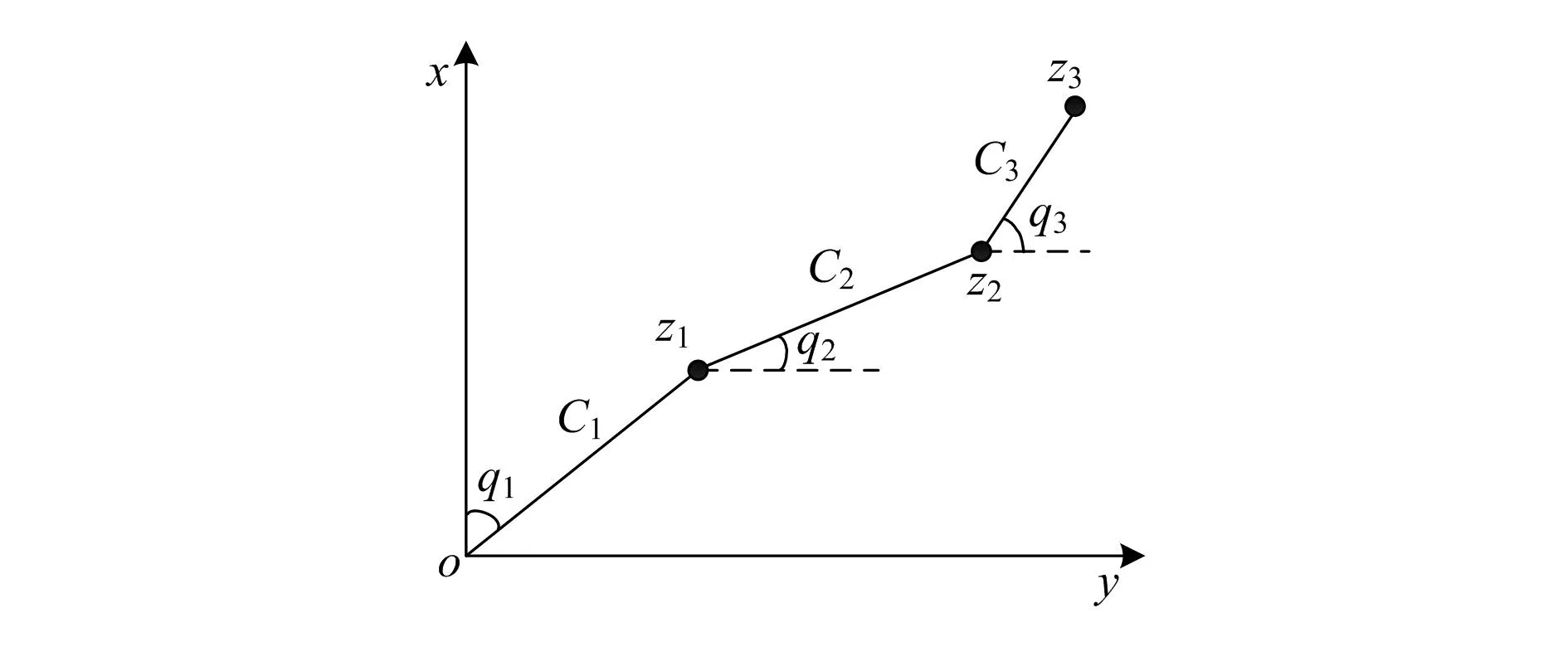
图1 机械臂质点坐标图
1.2 机械臂模糊力矩控制
因为机械臂的活动范围可以自由调整以适应不同的工作环境,使其具有较高的灵活性,所以需要依据上述分析结果获取机械臂活动的控制规律:
(3)

依据上述获取的机械臂[8]运动规律,对机械臂力矩进行补偿处理。设定机械臂模糊部分为η,从而获得机械臂理想轨迹各项参数状态:
(4)

依据上述计算结果建立机械臂不确定部分的有界包络函数‖η‖[9]:
‖η‖≤β1+β2‖x‖
(5)
式中:β2为机械臂不确定部分对总体不确定性的影响程度,‖x‖为机械臂状态方程。x的计算公式为:
x=h(x)+Iη
(6)
式中:x为机械臂的状态变量,h、I为机械臂力矩矩阵的两种形式。
为规划机械臂运动模型的全局稳定性,需建立Lvapunov函数重新获取机械臂的变结构运动规律:
(7)
式中:φ为建立的Lvapunov函数,T为迭代函数,b为变结构运动规律,Q为变结构控制器参数。
最后通过上述获取的机械臂的变结构运动规律,完成机械臂力矩控制。
2 基于Q-learning算法的机械臂运动路径避障控制
2.1 算法描述
设定学习变量为α、最佳取值范围为[0,1]、智能体为γ、平衡回报为αt、新循环状态为Zt+1,智能体γ可以在机械臂运动中进行更新循环状态的操作[10]。更新循环状态过程如式(8)所示:
Q(Zt,γt)→(1-τ)Q(Zt,γt)+τ[αt+α·maxQ(Zt+1,γt)]
(8)
式中:Q(zt+1,γt)为更新后的循环状态值,其中γt为智能体的状态;τ为学习因子;zt为原始循环状态。
为了获得机械臂在高维连续空间中的最佳运动轨迹,并对其与实际轨迹进行比较和计算反馈误差,可以引入BP神经网络函数。通过训练神经网络,能够学习并拟合机械臂在不同状态下的运动模式。一旦训练完成,可以将当前的机械臂状态作为输入,使用BP神经网络函数来预测最佳轨迹值。然后,通过对比实际轨迹和预测轨迹,计算它们之间的差异,从而得到反馈误差信息[11]。这些反馈误差有助于评估机械臂运动模型的准确性和精度,并指导改进控制策略以提高运动性能。因此,引入BP神经网络函数可以帮助优化机械臂的运动控制,并提升其精确度和性能。机械臂运动轨迹的反馈误差值计算公式为:
Δν=τ[μ(Zt,γt)+αmaxQ(Zt+1,γt)]-Q(Zt,γt)
(9)
式中:Δν为机械臂的反馈误差值,μ为激励系数。
2.2 Q值更新
基于Q-learning算法对机械臂运动轨迹进行优化时,可将获取的Q函数作为评价指标,辨识输出路径的理想状态。建立Q值表并对其进行初始化,通过R值确定机械臂下一运动状态,使用BP神经网络完成Q值更新。设定神经元输入向量为xi,对应权重为ωi,选择适当的激活函数计算机械臂Q值:
(10)
式中:yi为神经网络模型输出结果;ωik为权重系数,其中k为常数项。基于上述结果,使用神经网络的最佳逼近值对算法Q值进行更新,具体计算公式如式(11)所示:
Q(Zt+1,γt+1)=τQ(Zt,γt)+τ·ωik[αt+1+μt· maxQ(Zt,γt)]
(11)
式中:Q(Zt+1,γt+1)为最终的Q值更新值,μt为奖励值。当机械臂运动状态从Zt转向Zt+1时,可获取相应的μt,而学习因子也会随着Q值迭代效率的提高而加速收敛。
2.3 路径避障规划
机械臂移动路径可看作坐标系的移动过程,坐标转换中,路径规划不仅要考虑机械臂连杆长度与水平夹角的大小,还要对机械臂关节角度以及连杆偏距进行必要考量。设定机械臂空间范围的位姿变换矩阵为W,机械臂关节旋转角度为σi,连杆偏距为di,可得计算公式为:
W=
(12)
式中:Li为机械臂连杆长度,ψi为机械臂连杆与关节轴线的夹角。
设定机械臂移动链条为P,且该链条由若干机械臂节点构成。
在求解封闭空间机器人的最佳运动轨迹时,当机器人的关节轴与一点相交,可以利用高维方程对其进行降维,以求出最佳的路径。
为了保证机械臂整体运动的连续性,首先对机械臂进行处理,包括切断机械臂节点P0,并将其移动到坐标零点,设定关节的自由度P2=0,计算各关节的转向角和角度变量。通过这些处理,可以将机械臂的基准位置设定在坐标零点,便于后续计算和优化。为了确保机械臂运动的连续性,需要考虑关节的自由度和关节旋转距离。通过设定适当的自由度和计算合理的转向角和角度变量,可以确定机械臂在各个方向上的运动范围和关节之间的角度差。这样可以保证机械臂的运动在各个关节之间的协调性和连贯性。
依据上述分析结果,使用Q-learning算法对获取的路径进行误差校正,合理躲避路线上的障碍物,依据机械臂Q值状态获取路径解分布规律,通过迭代计算完成机械臂最佳路径的规划[12]。
3 实验
为了验证上述机械臂避障路径规划方法的整体有效性,需要对此方法进行测试。实验用机械臂如图2所示,运动路径如图3所示。
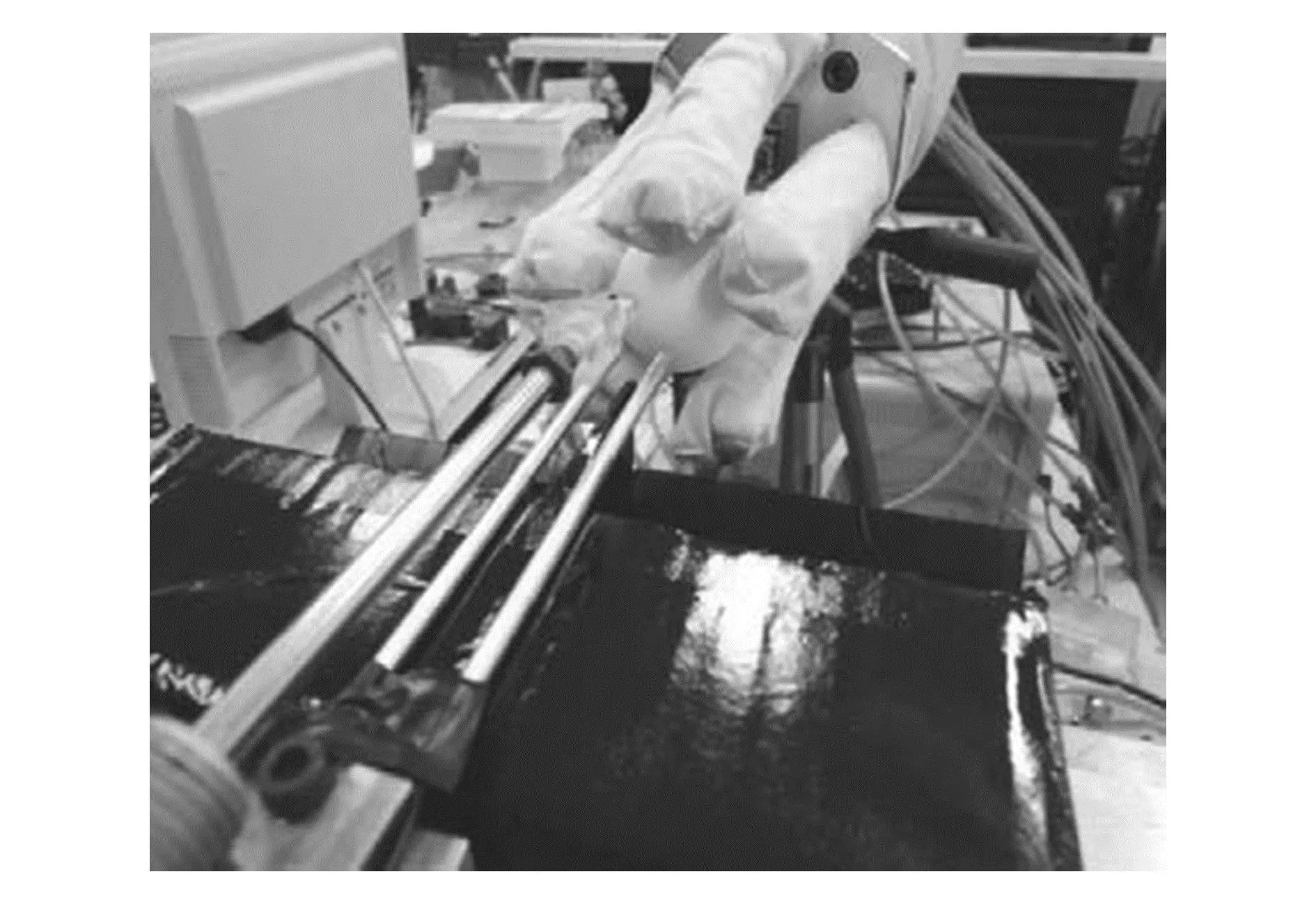
图2 实验用机械臂

图3 机械臂的运动路径
分别采用基于模糊变结构补偿的机械臂运动路径避障规划算法(本文方法)、基于单目视觉的多种群粒子群机械臂路径规划算法(文献[4]方法)、基于碰撞检测的空间冗余机械臂避障路径规划(文献[5]方法)对机械臂运动路径避障效果进行测试。
在机械臂路径规划过程中,路径规划效果优劣、规划时间的长短以及规划路径长度的大小都会对路径规划方法的规划性能带来巨大影响。采用本文方法、文献[4]方法以及文献[5]方法进行机械臂运动路径规划时,针对上述3种测试指标,测试3种路径规划方法的规划性能。
1)规划效果测试。
在相同的环境下,随机设置机器人的前进路线,采用上述3种方法进行路径规划,获取各个时段下机械臂的关节角度以及关节角速度,将3种方法的运动角度、关节角速度与理想关节角度、关节角速度进行对比。依据对比结果测试3种方法的路径规划效果,结果如图4、图5所示。

图4 不同方法路径规划过程中关节角变化曲线
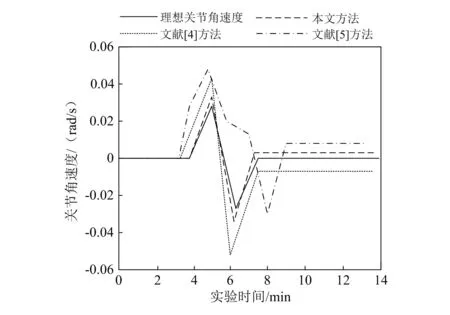
图5 不同方法路径规划过程中关节角速度变化曲线
分析图4可知,在避障路径规划过程中,用本文方法测试出的机械臂关节角变化情况与设定的机械臂理想关节角变化情况相接近,而用文献[4]方法与文献[5]方法测试出的机械臂关节角变换曲线与理想关节角变化曲线相差较大。分析图5可知,在进行路径规划时,用本文方法测试出的机械臂关节角速度测试结果与设定的机械臂理想关节角速度相近,文献[4]方法与文献[5]方法测试结果则不够理想。由此可知,本文方法在进行机械臂路径规划时的规划效果好。
2)规划路径长度测试。
机械臂在进行路径规划时,规划路径的长短能够直观反映规划性能的好坏。规划路径越长,说明规划性能越差,反之则越好。采用本文方法、文献[4]方法以及文献[5]方法进行机械臂运动路径规划时,对3种规划方法规划出的路径长度进行测试,测试结果如图6所示。

图6 不同规划方法的路径规划长度测试结果
分析图6可知,随着测试次数的增加,规划出的路径长度也随之增大。本文方法规划出的机械臂避障路径长度远小于文献[4]方法与文献[5]方法所规划的路径长度。这主要是因为本文方法在进行路径规划前,通过拉格朗日函数对机械臂进行了具体的动态学分析,所以在用本文方法规划避障路径时,规划的路径较短。
3)规划耗时测试。
在进行路径规划过程中,规划时间直接影响路径规划方法的规划性能。采用本文方法、文献[4]方法以及文献[5]方法进行机械臂运动路径规划时,对3种方法的规划时间进行测试,测试结果如图7所示。
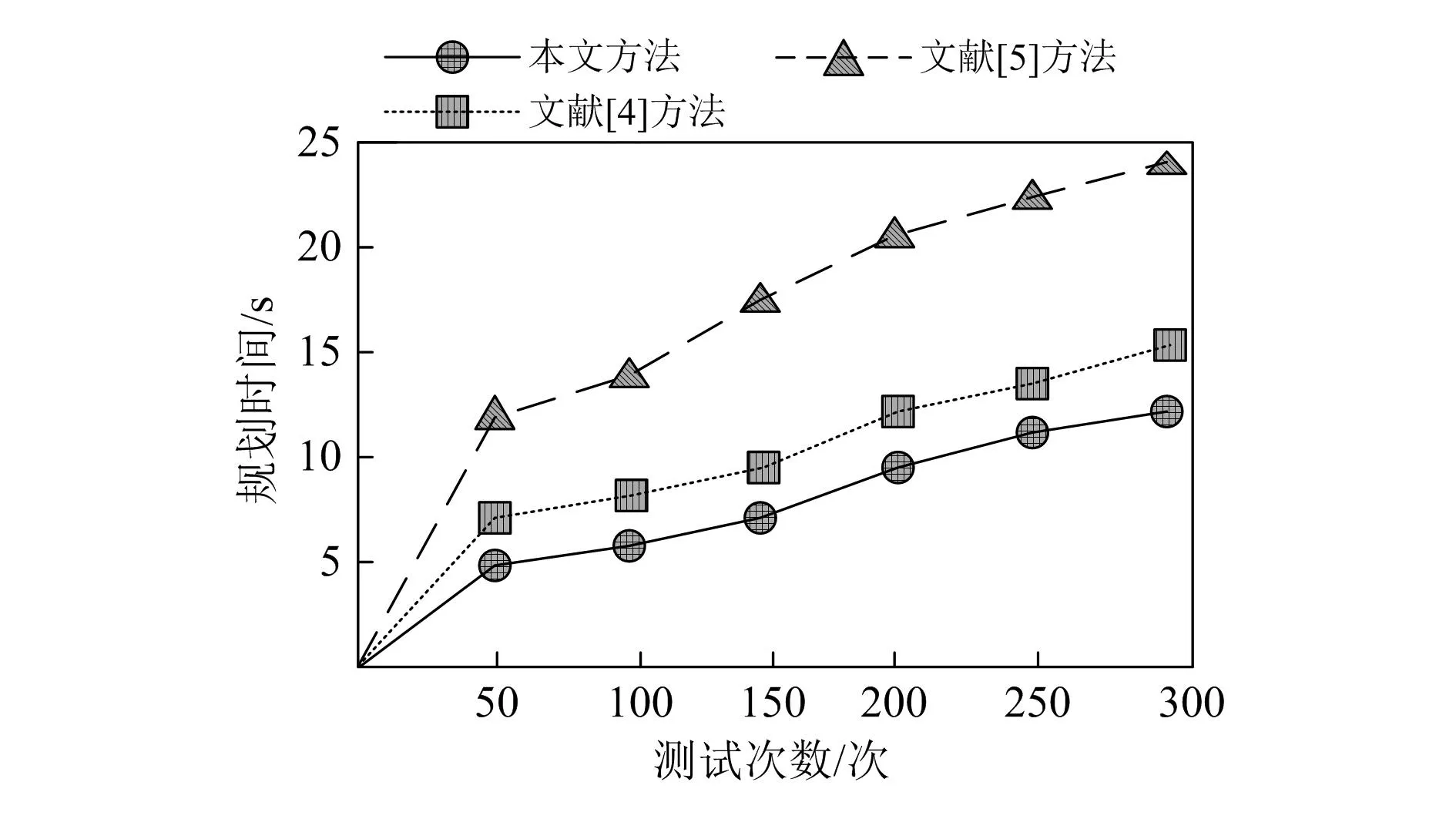
图7 不同路径规划方法的规划时间测试结果
分析图7可知,测试次数与路径规划时间呈正相关。本文方法的路径规划时间短于文献[4]方法与文献[5]方法路径规划时间。具体而言,本文方法在路径规划测试中,相较于文献[4]的方法和文献[5]的方法,路径规划时间短。综上所述,本文方法在路径规划过程中,规划效果好、路径短、规划用时少,证明本文方法的规划性能更优。
4 结束语
本文提出的基于模糊变结构补偿的机械臂运动路径避障规划算法,能够对机械臂力矩进行补偿控制,并通过Q-learning算法计算最佳移动策略,实现机械臂的避障路径规划。与传统路径规划方法相比,用本文方法进行路径规划用时更短,证明其理论和应用价值都很高,为机械臂路径规划提供了新的思路和方法。在未来的研究中将探索如何在复杂环境下实现更精确的机械臂避障路径规划。同时,优化算法的计算效率和使算法适应不同的机械臂结构和任务需求也是未来研究的主要方向。通过这些深入研究,机械臂路径规划的性能和应用领域将得到不断改进和拓展。
