基于不确定度评定与相关性计算的遥测水位误差分析
2024-02-01陈然,孙进
陈 然,孙 进
(1.北京市密云水库管理处,北京 密云 101512;2.中国水利水电科学研究院流域水循环模拟与调控国家重点实验室,北京 100038)
近年来,随着计算机与人工智能技术的不断发展和水文现代化建设步伐的加快,水位观测自动化代替人工观测已成为目前水文发展的方向[1]。自计水位计能够自动测定并记录河流、湖泊和灌渠等水体水位。在实际应用中,通常根据工程规模与形式、发展需求及应用位置的不同来选择自计水位计。例如,雷达波或超声波非接触式水位计,不受温度、湿度、风速、降雨等环境因素影响,采集数据稳定可靠,但是在寒冷环境下,天线容易出现结晶、结冰,数据会报错,需要及时进行处理,适用于窨井、罐体等狭小空间内的水位监测[2]。浮子、气泡、压力等接触式水位计,其中浮子式水位计通过水位采集传感器的原理进行水位测定,性能较稳定,采集数据的精度高,水位量程范围大,可实现水位的自动、快速测定,适用于水库、湖泊、河道等开放水体的水位监测。国内一些文献对自计水位计的精度进行了分析,例如:侯剑[3]分析了遥测水位和人工记录水位之间的比测偏差,表明产生的偏差总体可满足水位观测的规范要求;安兆利[4]利用回归分析法分析了自计水位计观测数据的精度;党增[5]依据遥测系统可靠性分析和外界环境影响误差的分析,表明自记水位计在设备工作正常的情况下观测精度可满足规范要求;程雯嘉[6]利用直线匀速比例法和线性趋势比例法分析了自动观测记录订正值与人工观测过程的相符程度,认为该法提高了水库水位的监测精度,同时减轻了人工观测的劳动强度。上述方法均说明了遥测技术在水文监测中发挥了重要作用。
目前,张家坟基本水尺断面的右岸水位观测井安装了浮子式水位计,利用浮子跟踪水位升降,以机械方式直接转动记录,实时观测河道水位,实现了水位自动、快速测定。为保证浮子式水位计观测数据的一致性和精确度,需要采用人工观测方式进行浮子式水位计的比测分析,分析其误差是否满足《水位观测标准》(GBT 59138-2010)的要求。为确保分析成果的科学性和合理性,本文采用不确定度评定、相关性计算等方法,进行人工观测与遥测水位的对比观测分析。
1 概况
1.1 研究区域
密云水库位于北京市密云区,以防洪、供水为主要功能,是华北地区最大的多年调节水库,总库容为43.75 亿m3。张家坟水文站位于北京市密云区石城镇张家坟村白河入密云水库入库口20 km 处,控制流域面积8 506 km2,是密云水库白河入库控制站,属于国家基本水文站,主要观测项目有水位、流量、降水、蒸发等。张家坟水文站汛期人工观测水位频次为2 次/h,洪水期适当增加测次,以控制水位的完整变化过程,具体测次根据水流特性及控制情况等因素而定,总的要求是能控制推算出逐日流量和各项特征值;非汛期人工观测水位为8:00、16:00 各1次,具体测次根据水流特性及控制情况等因素而定,总的要求是能够满足水文整编定线要求[7]。随着雨水情自动测报系统的发展和进步,遥测技术在大中型水库的科学调度中起到了至关重要的作用[8],遥测系统可以测定江河湖库降雨量、水位、流量等水文要素自然变化的情况[9]。张家坟水文站水位遥测系统建设主要经历了超短波自动测报系统、盖达卫星自动监测系统、海事卫星自动监测系统、北斗卫星和GPRS 自动监测系统4 个阶段[10]。由于海事卫星设备老化无法维修,GSM 数据传输经常拥堵,2018 年开始对密云水库雨水情遥测系统进行为期3 a 的改造,将各遥测站点设备陆续更新,通信方式改为北斗卫星和GPRS 2 种新模式[11]。经过2018—2021 年的4 次改造,目前使用北斗卫星和GPRS 自动监测系统,主要包括1 个中心站、1 个分中心站和4 个水位站,传感器是浮子式水位计[12];采集站点数据通过GPRS 通信和北斗卫星传输到中心站,其中GPRS 通信为主信道、北斗卫星通信为备用信道[13]。
对比观测采用2021、2022年7—8月人工观测水位数据与同时间遥测水位数据值。2 组数据的监测次数均为121 次,资料具有一致性。遥测与人工观测时间误差均小于±0.5 min,符合《水位观测标准》要求[14]。将7—8 月水位数据绘制水位过程线,如图1所示。从图1可以看出,遥测水位和人工观测水位的变化趋势基本吻合,并在出现误差值±2 cm 以上时对遥测水位值进行更正。遥测过程中,并未出现因设备故障或其他原因造成的数据缺测、异常或丢失,遥测数据合理且完整。

图1 7—8月人工观测和遥测水位过程线对比
1.2 研究方法
1.2.1 不确定度评定
不确定度是指由于测量误差的存在、对被测量值的不能肯定的程度,它是反映测量结果质量的指标。不确定度越小,说明测量结果与被测量的真值越接近,质量越高,有使用价值;不确定度越大,说明测量结果的质量越低,缺乏使用价值。系统不确定度、随机不确定度及综合不确定度的计算公式如下:
式中:Pyi为遥测水位值(m);Pi为人工观测水位值(m);N为观测次数;X''y为系统不确定度值;X'y为随机不确定度值;XZ为综合不确定度值。
1.2.2 相关性计算
相关性计算用于研究2 个变量或多个变量之间是否存在线性关系,相关系数则用于确定变量之间的关系强度和方向。相关系数是常用的一种相关性计算方法,可用于描述2 个数值变量之间线性相关的程度[15]。
假设有变量系列Y和变量系列X,则Y和X之间的相关系数计算公式如下:
式中:RXY为X和Y之间的相关系数;n为资料样本数;Xi为X的第i个样本值;Yi为Y的第i个样本值;-X为X的样本均值;-Y为Y的样本均值。
相关系数RXY的取值范围为[-1,1]。RXY大于0,说明Y和X之间为正相关;RXY小于0,说明Y和X之间为负相关;RXY等于0,说明Y和X之间不相关。RXY的绝对值越大,Y和X之间的相关程度就越高。
2 研究结果
张家坟水文站2021、2022年7—8月遥测水位和人工观测水位误差统计情况,详见表1。其中,水位误差为0 的测次11次,占总测次的9.09%;水位误差为±0.01 m 的测次39次,占总测次的32.23%;水位误差为±0.02 m 的测次37 次,占总测次的30.58%。累计百分比结果显示,水位误差以±0.01、±0.02 m 最多,两者合计达到76次。
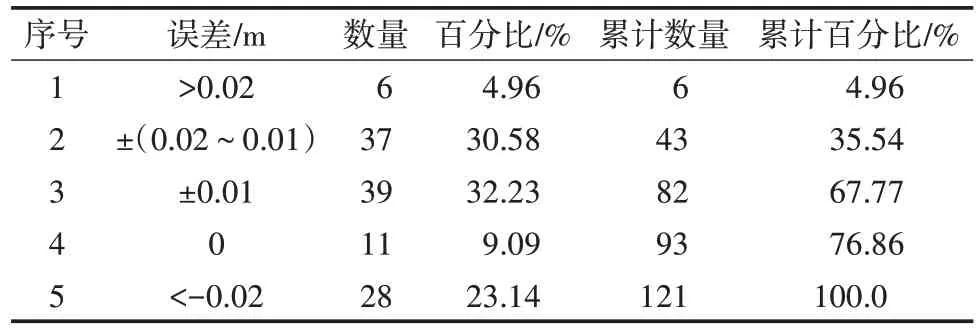
表1 张家坟水文站人工观测水位与遥测水位误差统计
张家坟水文站2021、2022年7—8月人工观测及遥测水位共监测121次,由于数据较多,每隔5 d选取有代表性的数据,以体现数据的可靠性,比测分析结果详见表2。通过计算得出,系统不确定度为0.008 8,随机不确定度为0.777 9,综合不确定度为0.781 1,结果详见表3。根据国家颁布的《水位观测标准》[14]要求,在置信水平95%下综合不确定度应小于3 cm,系统误差应控制在±1 cm范围内,比测结果符合规范要求。
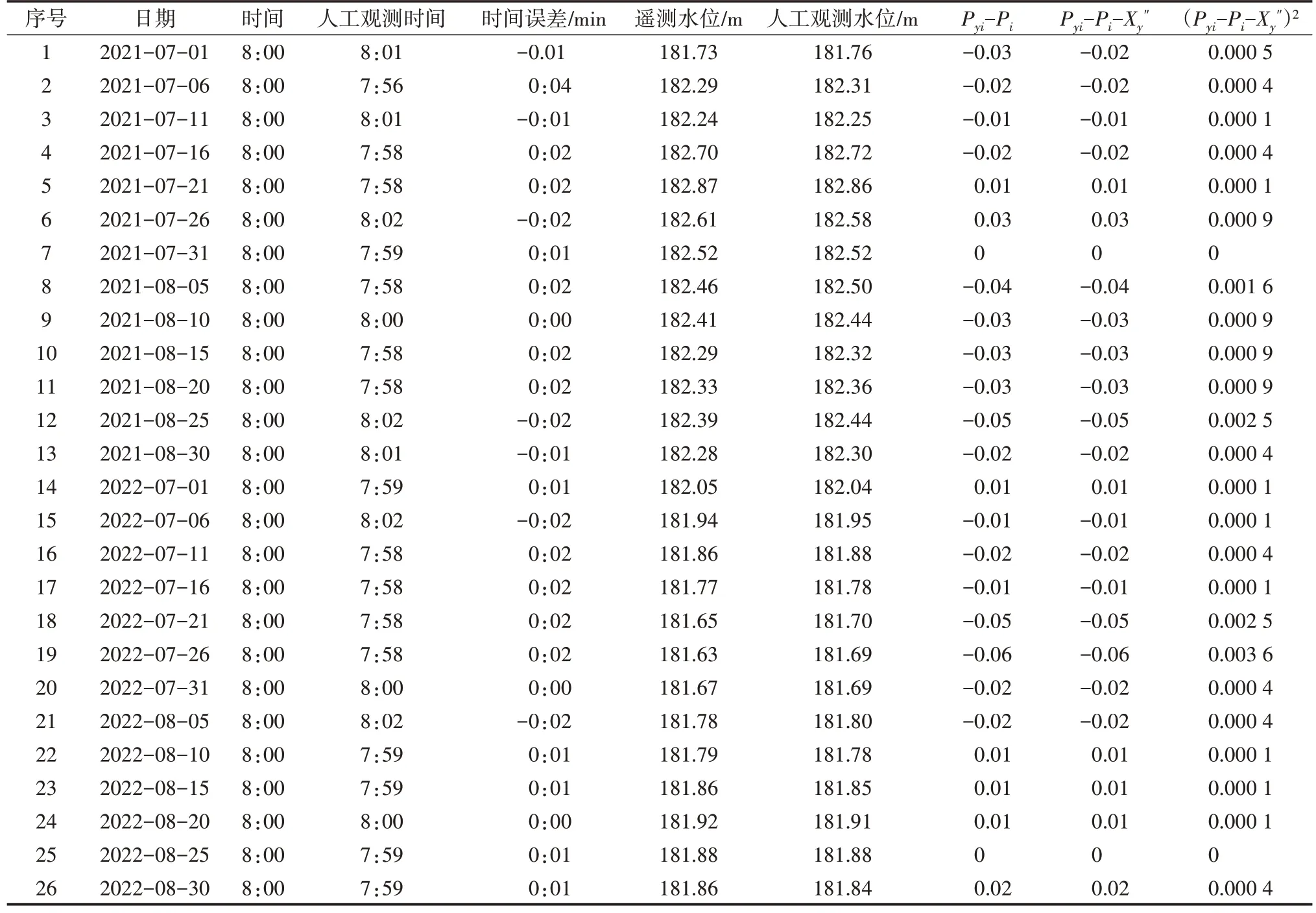
表2 张家坟水文站遥测水位与人工观测水位比测分析

表3 不确定度评定成果
人工观测水位和遥测水位相关关系,如图2 所示。从图2 可以看出,人工观测水位和遥测水位数据的相关系数达到0.99以上,点据分布在直线附近,说明2 组数据显著相关。对水位值在181.40~183.40 m 之间的人工观测水位和遥测水位数据进行自回归分析计算,回归系数为100%。

图2 人工观测水位和遥测水位相关关系
3 结论
(1)张家坟水文站2021、2022 年7—8 月遥测水位与人工观测水位数据的系统不确定度为0.008 8、随机不确定度为0.777 9、综合不确定度为0.781 1,2组数据非常接近,系统误差和时间误差均符合水位观测标准要求。
(2)张家坟水文站遥测水位与人工观测水位数据的相关系数达到0.99 以上,表明了2 组数据间良好的相关关系。
(3)研究成果说明了基于遥测系统采集水位数据的有效性和可行性,遥测技术具有自动化程度高、节省人力物力等优点,可为水文“预报、预警、预案、预演”提供可靠的数据支撑,具有较好的应用前景和推广应用价值。