一种基于三维到达角的无偏伪线性卡尔曼滤波
2024-01-30林建军王骧予涵班晓军
林建军,王骧予涵,班晓军
(1.哈尔滨工业大学航天学院,哈尔滨 150000;2.哈尔滨工程大学航天与建筑工程学院,哈尔滨 150001)
0 引言
无源侦察定位技术具有作用距离远、机动性强的优点,在军事上存在着巨大的潜在价值。与有源定位不同,无源定位不需要向对方发射探测信号,具有隐蔽性良好、生存能力强的优点。因此,随着电子干扰技术、反侦察技术的发展,其在军事领域的研究价值日益凸显。无源定位的方法较多[1-2],根据定位原理的不同可分为测向定位法、信号强度定位法、到达时间定位法、到达时间差定位法、多普勒频率定位法等。机载快速定位技术是由搭载各式传感器的无人驾驶飞行器(unmanned aerial vehicle,UAV)取代传统的固定基站,对目标进行定位跟踪的一项技术。根据UAV 的数量可以分为单站定位与多站定位。单站定位始终只有一架UAV 工作不需要受到其他限制,具有机动性强、灵活性高的优点,但单次测量时存在信息量不足,无法对目标运动状态完全估计;而多站定位观测信息虽然较丰富,对运动形式要求较少,但不同平台之间的数据同步与数据融合都有着严格的限制,使得观测系统的机动性和独立性有所降低[3]。因此,单站定位技术具有更为巨大的研究潜力。
基于三维到达角对目标运动状态进行估计的技术称为3D-AOA(three-dimensional angle of arrival)目标跟踪,诸多学者对该技术进行了研究,按照状态估计方法大致可以分为非线性滤波法与伪线性滤波法。伪线性滤波方法是通过对具有非线性性质的角度量测方程进行伪线性化得到[4],具有计算复杂度低、初值不敏感的优点,文献[5]曾对EKF、伪线性滤波以及粒子滤波在二维条件下的性能进行了比较,结果表明伪线性滤波方法与粒子滤波的性能接近,但其算法复杂度远低于粒子滤波。但伪线性滤波在噪声较大时,存在严重的有偏性问题[6],为此,Dogancay等[7-8]对偏差进行了分析并设计了误差补偿方法,并将辅助变量法也应用到伪线性滤波上。偏差补偿伪线性卡尔曼滤波(bias-compensated pseudo-linear Kalman filter,BC-PLKF)与辅助变量伪线性卡尔曼滤波(instrumental variable pseudolinear Kalman filter,IV-PLKF)是其中比较有代表性的方法,但IV-PLKF受限于BC-PLKF,当目标出现机动时很可能在BC-PLKF时就出现发散现象,严重影响IV-PLKF性能;郭戈等[9]则对传感器不确定性进行了考虑,对过程噪声的不确定性进行了建模,提出了递推辅助变量伪线性卡尔曼滤波(recursive instrumental variable Kalman filter,RIVKF);而Pang等[10]则考虑了观测平台自身位置估计误差造成的影响,对该部分误差进行了补偿,文献[11-12]则是采用了一种添加约束条件的方法来达到渐进无偏的效果。Huang等[13]将噪声项与真值分离的方法适用于二维条件的具有无偏性的UB-PLKF(unbiased pseudolinear Kalman filter),从原理上实现了算法的无偏性,并通过仿真实验表明该方法能够较好地解决机动目标的跟踪问题。
然而,在基于角度信息的目标跟踪中,大多数方法适用于二维条件下的近距离目标,且研究对象主要为匀速运动目标,而对于大场景下的远距离机动目标研究较少。本文将在此基础上,将适用于二维场景下的UB-PLKF 方法推广到三维条件下,并设计EKF 作为角度滤波器对其进行辅助得到3DUBKF(three dimensional unbiased Kalman filter),使其适用于远距离场景下机动目标跟踪,并保持较高的定位精度。
1 基于3D-AOA的目标定位模型
1.1 基于3D-AOA的运动模型
对于机动目标,其运动轨迹呈现为曲线形式,在文献[14]就将目标轨迹假设为服从关于时间t的N次多项式,而根据样条插值理论,可以选择一次函数作为样条插值的基函数,该情况正对应了目标匀速运动。因此,将匀速运动模型作为机动目标的运动模型具有一定的合理性。
定义目标在k时刻的位置用pk=[xT,k,yT,k,zT,k]T表示,速度vk=[vx,k,vy,k,vz,k]T,xk为目标在k时刻的状态变量,其状态空间模型可由如下形式表示
其中,xk=;Fk为k时刻的目标状态转移矩阵;wk表示k时刻的过程噪声,其自相关矩阵,
其中,T表示采样时间间隔;q表示噪声的功率谱密度(m2/s3);I表示单位矩阵。
1.2 基于3D-AOA 的量测模型
基于3D-AOA 的目标跟踪,其量测模型具有非线性。定义观测平台的位置uk= [xo,k,yo,k,zo,k]T,观测平台对目标的方位角与俯仰角的观测方程可表示为
其中,δk=[nk,mk]T;nk,mk为相互独立的高斯白噪声,标准差分别为σθ,k,σφ,k;E{δkδTk}=Rk=。
该模型进行伪线性化可以得到新的系统状态方程
式中
1.3 伪线性卡尔曼滤波
根据1.2节的结果,将卡尔曼滤波算法应用到该伪线性系统中,得到如下的伪线性卡尔曼滤波算法
(1)状态预测阶段
(2)更新阶段
对卡尔曼滤波进行偏差分析,将式(12),(13),(14)代入到式(15)中,并利用矩阵求逆引理可以得到
令
于是,对式(17)求取期望可以得到伪线性卡尔曼滤波估计的偏差为
也就是说,对于伪线性卡尔曼滤波而言,其原理性偏差由Bk与Ck两部分组成。Bk是由目标的过程噪声引起,当过程噪声较小时,该部分可近似为0,即E{Bk}≈0;而Ck是由于系统伪线性化使得量测矩阵Hk与ηk存在相关性引起的,二者之间的相关性不可忽略,是伪线性卡尔曼滤波存在有偏性的根本原因。Ck的大小与角测量噪声大小有关,当噪声较小时并不明显,而当角测量噪声增大时,将会快速增大使得状态估计结果迅速发散。因此为了保证目标跟踪的精度,必须对偏差进行处理。
2 3D-UBKF
2.1 3D-UBKF算法原理
为了消除伪线性卡尔曼滤波的偏差,目前的解决思路主要分为对偏差进行估计再补偿以及消除量测矩阵Hk与ηk之间相关性两种[7]。而根据偏差补偿的解决思路,只适用于角测量为小噪声的情况,当噪声较大时去偏效果严重下降,如BC-PLKF;消除量测矩阵Hk与ηk之间相关性却能从原理上解决算法的有偏性问题,如IV-PLKF。但是,该方法的辅助变量却是通过BC-PLKF 进行构造,受限于BC-PLKF的性能。为了消除Hk与ηk之间相关性,本文通过将噪声项从量测矩阵中分离出来,提出了一种适用于三维场景且具有无偏性能的3D-UBKF算法。然而,将该方法应用到远距离场景下时,发现该方法易出现估计发散的情况,为此,本文还设计了EKF作为角度滤波器帮助3D-UBKF 来改善该问题。
在小噪声条件下,假设cosnk≈cosmk≈1,sinnk≈nk,sinmk≈mk,将其代入伪线性量测矩阵Hk中
将式(22)与式(23)代入式(6)得到
式中
将式(24)两边同乘对角阵diag([1/mk1,1/mk2]),于是得到
据式(21)的结果可知,此时原理性偏差
由于¯Hθ,k与¯Hφ,k分别与角测量噪声nk、mk无关,因此E{Ck}=0,即该算法具有无偏性。整理3D-UBKF算法如表1所示。

表1 基于3D-UBKF的目标跟踪步骤Tab.1 Target tracking steps based on 3D-UBKF
在实际应用过程中,由于dk以及观测真值θk,φk未知,无法直接得到Gk以及参数mk1,mk2,可以采用估计值代替,这个思想与辅助变量法具有一定的相似之处。而根据辅助变量法的收敛条件,需要保证估计矩阵^Gk与真值Gk具有较强的相关性,若直接采用该方法的角度估计值作为真值输入,那么很容易在前期由于估计不够准确而使得与真值Gk不相关,使得目标运动状态估计发散。EKF 是一种不具有原理性偏差的非线性滤波算法,且计算量小,对角度的估计较稳定,因此,采用EKF方法后验估计的方位角与俯仰角作为该算法的角度真值输入,从而得到
于是,总结3D-UBKF 算法的工作流程如图1所示。

图1 3D-UBKF工作流程Fig.1 3D-UBKF workflow
2.2 基于EKF的角度估计
EKF适用于非线性高斯模型,应用十分广泛。根据第一章的模型,可以得到该系统模型为
EKF采用泰勒公式展开将非线性模型近似为线性模型,将其应用到系统(35)中,对于表2中Jk可由式(36)得到

表2 基于EKF的角度估计步骤Tab.2 AOA estimation steps based on EKF
式中
3 仿真分析
本章通过仿真实验对算法的性能进行测试,选择EKF,CKF(cubature Kalman filter)[15],3DIVKF(3D-instrumental variable based Kalman filter)[8]作为对比对象,分别对具有单一运动模型的目标以及组合运动模型的目标(匀速运动模型+协同转弯模型)进行了比较。
3.1 单一运动模型目标仿真分析
仿真场景一:仿真时间长720 s,采样时间间隔0.2 s,蒙特卡罗仿真200次。观测平台的出发点为坐标原点,起始速度为(0 m/s,250 m/s,0 m/s)T。为了保证观测平台对目标具有较高的可观性,过程中采用协同转弯与匀速直线运动的组合形式,无天向运动,最终设计观测平台的第一阶段的机动策略如表3所示,重复该过程9次。

表3 航行轨迹参数Tab.3 Navigation trajectory parameters
水平面上的机动轨迹如图2所示,起始点为坐标原点。

图2 观测平台X-Y 平面运动轨迹Fig.2 Observation platform X-Y plane motion trajectory
目标的起始点位置为(60 km,80 km,10 km)T,速度为(-330 m/s,-170 m/s,1.21 m/s)T,将过程噪声Q中的过程谱密度噪声设置为qx=2 m2/s3,qy=2 m2/s3,qz=0.2 m2/s3。另外,设置滤波器初始值。由于估计过程中假设无先验信息,只能通过传感器探测范围来确定,将滤波器初值设为1.5倍真值,初始协方差设置为625,625,6.25,6.25,6.25]),观测噪声协方差矩阵R与过程噪声矩阵Q此处均设置为真值,3D-IVKF中的阈值设置为3σ。
图3比较了目标在做匀速直线运动条件下,在不同角测量误差条件下的算法,其中,图3(a)对比了不同算法在500~720 s时间内的绝对位置误差(absolute position error,APE),该指标可一定程度反映算法的收敛速度,图3(b)对比了采样结束时不同算法的APE,此时目标与观测平台距离为342 km。通过图3(a)与图3(b)可以看出当角测量误差从0.1°变化到0.5°时,各算法误差逐渐增大,而3D-UBKF与3D-IVKF 方法的误差变化较小,但角测量误差从0.1°到0.25°的变化过程中,CKF与EKF方法的误差均显著低于其他两种基于伪线性量测方程的方法;当角测量误差达到0.3°时,由于3D-UBKF以及3D-IVKF 对角测量误差相对不敏感,此时3DUBKF在500~720 s时间内的时均APE 达到最小,而3D-IVKF 的误差则与EKF,CKF 十分接近,这说明此时3D-UBKF 的收敛速度较快;而当角测量误差达到0.5°时,3D-UBKF 的算法优势进一步扩大,此时从精度与收敛速度上均为最优。图4展示了算法在0.5°角测量噪声时的跟踪效果。

图3 目标匀速时算法在不同角测量误差条件下的误差对比图Fig.3 Error comparison of algorithm under different angular measurement error conditions when the target speed is constant
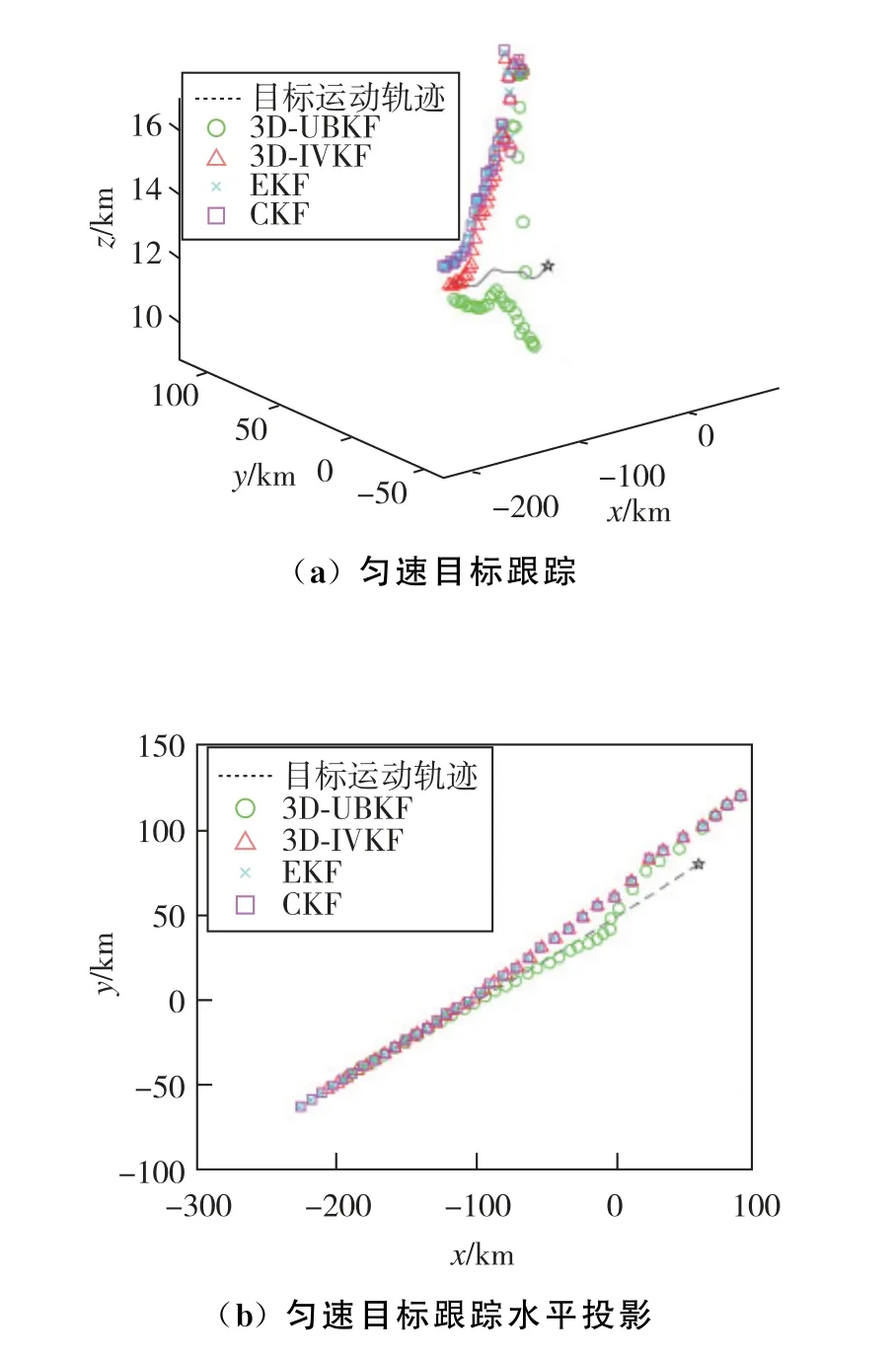
图4 匀速目标跟踪态势图Fig.4 Situation map of uniform motion target tracking
因此,根据上述仿真结果可以看出,在匀速条件下,EKF,CKF的误差指标接近,在角测量误差小于0.3°时均表现出优异的定位跟踪性能,但当角测量误差大于0.3°时,对算法的收敛速度影响较大;基于伪线性量测方程推导的3D-IVKF 与3DUBKF在小噪声条件下定位跟踪性能上则稍微差一些,但收敛速度与跟踪精度对角测量误差相对不敏感,当角测量误差达到0.5°时,3D-UBKF 能达到同时兼顾精度与收敛速度的目的。
3.2 组合运动模型目标仿真分析
仿真场景二:观测平台的运动轨迹与仿真场景一保持一致,目标的起始点位置为(60 km,80 km,10 km)T,初始速度为(-330 m/s,-170 m/s,1.21 m/s)T,过程噪声Q中的过程谱密度噪声设置为qx=2 m2/s3,qy=2 m2/s3,qz=0.2 m2/s3。在采样前300 s保持匀速直线运动,之后z方向高度不变,产生在水平方向顺时针旋转的匀速圆周运动,角速度为1(°)/s,持续30 s,之后继续保持匀速直线运动。滤波器参数设置保持不变。
图5 比较了目标在机动条件下,不同算法在不同角量测误差条件下的误差表现,其中,图5(a)对比了不同算法在500~720 s时间内的时均APE,图5(b)对比了采样结束时不同算法的APE,此时目标与观测平台之间距离为305 km。在目标发生机动的条件下,可以看到各算法的性能表现仍大致保持一致。通过图5 可以看到,非线性滤波的EKF,CKF在角测量误差小于0.3°时,性能十分接近,优于伪线性滤波的3D-IVKF 与3D-UBKF,但随着角测量误差增大,误差的变化速度也高于这两种算法。图5(a)可以看到,角测量误差从0.1°到0.25°的变化过程中,CKF与EKF方法的误差较小;当角测量误差达到0.3°时,3D-UBKF 的误差指标开始与EKF,CKF接近;而角测量误差为0.35°时,EKF,CKF的误差指标则与3D-IVKF接近。再观察角测量误差为0.5°时各算法的误差指标,可以看到,EKF,CKF的各项误差指标均高于3D-IVKF 以及3DUBKF;其中,3D-UBKF达到了最佳的跟踪效果,在整个角测量误差增大的过程中,3D-UBKF的绝对位置误差以及采样结束时刻APE均几乎不发生变化。图6为角测量噪声为0.5°时各算法的跟踪情况。

图5 目标机动时算法在不同角测量误差条件下的误差对比图Fig.5 Error comparison of algorithm under different angular measurement error conditions during target maneuvering

图6 机动目标跟踪情况Fig.6 Maneuvering target tracking situation
根据算法对机动目标的仿真结果来看,在机动条件下,EKF,CKF在角测量误差小于0.3°时仍能表现出优异的定位跟踪性能,但当角测量误差大于0.3°时,对算法的收敛速度影响较大;基于伪线性量测方程推导的3D-IVKF 与3D-UBKF 在小噪声条件下,定位跟踪性能上则稍微差一些,其中,3DUBKF由于结合了EKF 的后验结果,在小噪声条件下保持住了EKF 的优良性能,跟踪精度略低于EKF,而明显优于3D-IVKF;除此之外,由于伪线性滤波对角测量误差相对不敏感,当角测量误差达到0.3°~0.5°时,3D-UBKF 与3D-IVKF 的跟踪精度逐渐超过EKF 与CKF,而在大噪声条件下,3DUBKF又表现出优于3D-IVKF 的跟踪性能,性能指标在各算法中最优。
进一步对各算法的运行效率进行统计,以EKF一次蒙特卡罗仿真的时间作为单位时间,将其他算法的一次蒙特卡罗仿真时间与之相除作为各算法的运行时间,得到各算法相对运行时间如表4所示。可以看出,在小噪声条件下,EKF 同时兼顾了运算速度快、定位估计精度高的优点。而基于伪线性滤波改进的3D-IVKF 与3D-UBKF 由于添加了其他运算,使得运行效率有所下降,但仍明显优于点估计形式的CKF。3D-UBKF通过牺牲一定的运行速度和小噪声条件下的定位估计精度,达到了运行速度相对较快,且对噪声具有较强抗干扰能力的特点。

表4 算法相对运行时间对比Tab.4 Comparison of algorithm relative running times
4 结论
本文通过仿真实验表明:
1)基于非线性滤波理论的EKF,CKF 在小噪声条件下性能稳定,定位估计精度高,两种算法效果十分接近;但噪声较大时,这两种算法均会出现目标跟踪精度迅速下降的问题,对角测量噪声敏感。本文提出的3D-UBKF 相比于EKF,CKF,具有更强的抗干扰能力。
2)基于伪线性滤波的3D-IVKF 与3D-UBKF均有效改善了普通3D-PLKF 的有偏性问题,具有对角测量误差不敏感的优点,当角测量误差较大时,具有比EKF,CKF 更加良好的目标跟踪性能,尤其是本文提出的3D-UBKF,相比于3D-IVKF 具有更高的目标跟踪精度。对于百公里级别的目标,当角测量误差从0.1°变化到0.5°,算法在仿真时间结束时均能将绝对位置误差降低至10 km 以内。
3)3D-UBKF由于利用了EKF 对角度测量值预先进行了处理,增大了运算量,其运行效率介于3D-IVKF与CKF之间,具有与EKF同一个量级的运行速度。
综上所述,3D-UBKF 同时兼顾了目标定位跟踪精度、抗干扰能力以及运行速度,可以为远距离场景下的目标跟踪提供有效方法。
