低空空域无人机运行安全保障技术研究综述
2024-01-22朱仁伟
羊 钊,李 娜,毛 亿,朱仁伟
(1.南京航空航天大学通用航空与飞行学院,海上智能网信技术教育部重点实验室,江苏 南京 211106;2.南京航空航天大学民航学院,江苏 南京 211106;3.河海大学海上智能网信技术教育部重点实验室,江苏 南京 210024;4.东南大学交通学院,江苏 南京 211189)
在5G 通信、无人驾驶等新技术的推动下,低空空域物流配送等通航业务日益多元化,低空无人机飞行需求与日俱增。随着低空空域飞行密度的不断增大,无人机与建筑物、无人机与其他航空器之间发生飞行冲突的风险与日俱增。考虑航空器之间感知避让、安全间隔等方面的差异,以及无人机运行轨迹灵活多变的特点,要保障低空空域安全、有序运行,必须不断提高低空空域无人机运行安全管理的技术手段。本文从无人机轨迹预测与意图识别、低空空域飞行冲突探测以及风险评估及预警告警等3 方面综述当前的研究进展及存在的挑战。
1 无人机轨迹预测与意图识别
1.1 无人机轨迹预测
轨迹预测作为低空空域无人机管控过程中有效识别无人机飞行意图的手段,是无人机异常行为检测和飞行态势感知的基础。由于无人机轨迹具有高度的时变性和非线性特征,因此轨迹预测的一个重点方向是如何通过科学有效的方法表征无人机未来飞行行为的不确定性。预测方法大体分为2 类,如图1 所示。
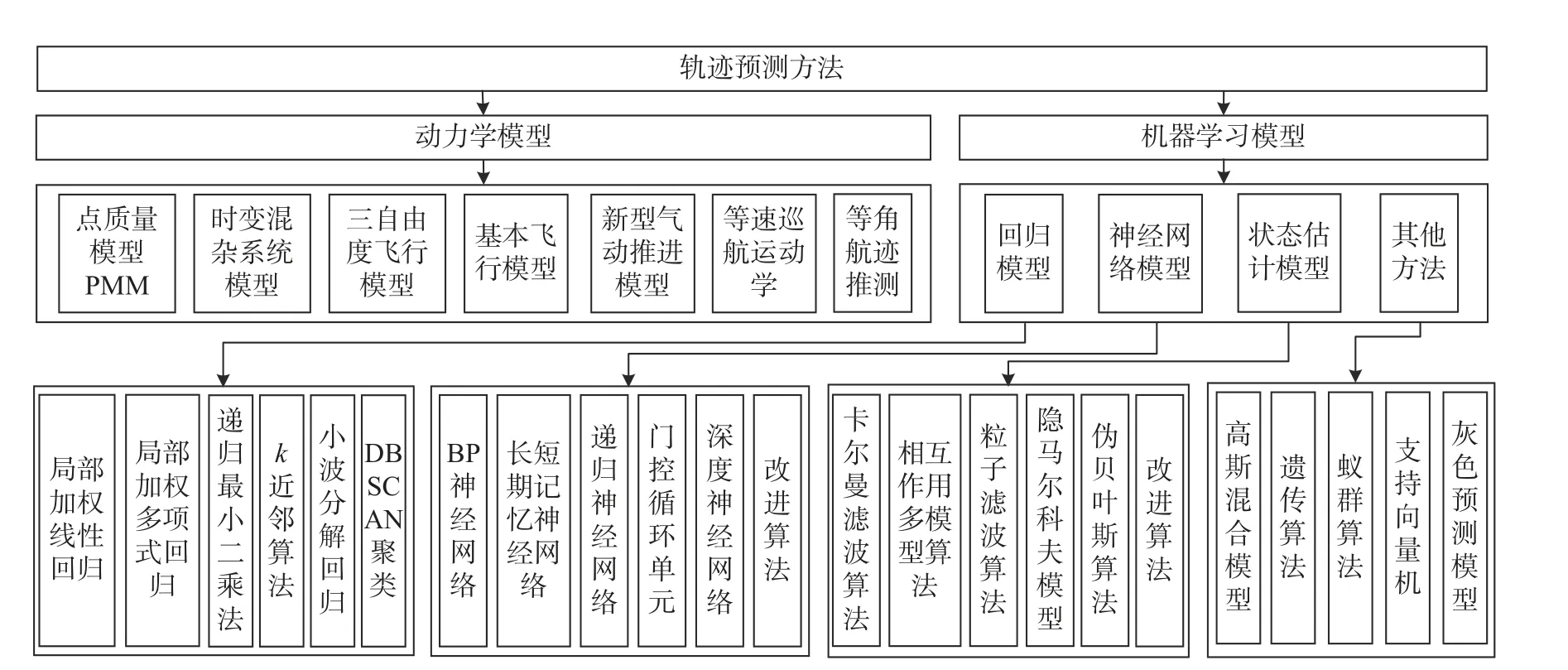
图1 轨迹预测方法分类Fig.1 Classification of trajectory prediction methods
基于动力学模型的轨迹预测方法多在一定的假设条件下,通过建立运动学和动力学方程表达航空器飞行时力的作用与运动轨迹之间的关系。影响航空器运动轨迹的因素非常复杂,其中一个重要因素是风,在基于动力学模型的许多研究中均考虑了风对运动轨迹的影响[1],通过考虑航空器在低空飞行时所受风向及风的作用力,建立低空风运动模型,结合轨迹预测算法实现对低空无人机轨迹的跟踪预测[2],但对于运动轨迹灵活、多在近地面低空空域中飞行的无人机,风势较难描述,往往难以建立精确的动力学方程对轨迹进行预测。此外,针对在故障或失效状态下的无人机轨迹,多基于典型故障场景和航空器动力学,通过预测轨迹及碰撞点以确定无人机的影响范围,常使用点质量模型等方法。文献[3]研究了四旋翼无人机在不同推进系统故障下造成的未来轨迹、速度和坠毁面积,以进一步评估城市环境下旋翼无人机的运行风险。
基于机器学习的轨迹预测方法依赖于大量历史轨迹信息,通过历史时间序列数据训练模型参数,表征运动过程各种因素对航空器的影响,进而建立起历史数据与未来预测时间点航空器位置之间的影响关系。一些研究是采用构建双向门控循环单元[4]、在LSTM 网络的循环中嵌入卷积层[5]等方法,在提升轨迹预测精度的同时缩短轨迹预测用时。此外,现有研究也更关注对模型输入数据的处理以及数据选择的覆盖面和针对性。通过气象雷达图像提取可能影响轨迹的信息[5],可以使模型训练得到的信息更全面。当存在真实飞行试验时,可以在历史轨迹数据积累的过程中不断完善无人机轨迹预测和规划;当没有真实轨迹数据时,可以通对不同条件下的不同机动动作进行飞行仿真,得到大量轨迹样本[6]。基于动力学模型的轨迹预测方法与基于机器学习的轨迹预测方法对比如表1 所示。

表1 动力学轨迹预测与机器学习轨迹预测方法对比Tab.1 Comparison of dynamic trajectory prediction and machine learning trajectory prediction methods
1.2 无人机意图识别
意图识别不仅要找出目标的意图,更要挖掘态势要素之间隐藏的因果逻辑关系,定量分析目标特征与意图推断的因果效应[7]。在民用领域,典型的无人机非法意图包括入侵禁飞区、碰撞其他航空器,以及利用机载摄像非法拍摄隐私[8]等。其中,对意图的判定基础在于距离标准的确定,从而定义保护区域。文献[9]以执行固定航线的物流无人机为对象,综合考虑了定位误差、速度误差和侧风的影响,分别建立侧向、纵向和垂直方向的碰撞风险评估模型,得到3 个方向上无人机之间的最小安全间隔。识别无人机的飞行意图,可以有效判别无人机的目的合法性,并将获取的信息作为后续冲突探测和风险评估模型的输入要素。
根据目标无人机与探测设备之间是否进行通信将其分为合作型和非合作型无人机。对于与探测设备进行通信的合作型无人机,在无人机未损毁的情况下可依赖合作型探测设备如空中防撞系统、广播式自动相关监视系统等实时共享飞行信息,监控无人机预置的航路点和规划航迹,或基于传感器采集的飞行状态信息以识别未来飞行意图。对于未接入无人机管理系统的非合作无人机,无法直接获取其意图信息,可以通过相关探测技术[10]结合轨迹预测和意图识别算法识别其未来意图动向。不同探测技术的特点如表2 所示。一些学者研究如何在监视环境中尽早识别无人机离开其被授权飞行的地理区域或入侵禁止区等非法意图,以便能提供充足的时间避免发生冲突或侵犯隐私[11]。

表2 无人机探测技术对比Tab.2 Comparison of drone detection technologies
研究者基于运动学建模或机器学习等方法建立了种类多样的无人机轨迹预测和意图识别模型,结合不同类型无人机的飞行特性,通过建立简化而精确的运动学方程、对算法进行改进以及对数据选择和处理的不断增强等角度刻画无人机未来飞行意图的不确定性,以期实现高精度和高效率的轨迹预测。然而,由于低空空域环境的复杂性和动态性,关于时变场景下的无人机轨迹预测及意图识别相关技术有待进一步研究,面临的挑战及需要解决的核心问题包括以下方面。
1)判断无人机是否具有入侵意图的首要基础是进行保护区的划设。其核心问题是如何面向不同运行场景设置建筑物、航空器等的安全飞行间隔标准。一方面,安全飞行间隔的设置需考虑航空器种类、性能的差异,尤其是面向未来有人机、无人机融合运行的飞行场景;另一方面,无人机在城市低空运行时还需考虑白天和夜间人流密度、噪声限制等的不同,保护区的设置可能是时变的。
2)在轨迹预测任务中:对于飞行计划共享的合作类无人机,其模型输入数据来源多样,预测时需考虑所采用的导航系统的可靠性和定位误差,其关键问题是如何集成多源数据和预测模型提高轨迹追踪精度;对于非合作类无人机,在有限的监测时间下,其历史轨迹数据具有典型的小样本特征,其关键问题在于如何基于小样本历史轨迹数据刻画飞行行为的不确定性,实现高精度的轨迹实时预测。
2 低空空域飞行冲突探测
飞行冲突探测是感知和避让的关键环节,准确的冲突探测技术是规避碰撞的前提。冲突探测根据探测时间的不同可分为短期、中期和长期冲突探测;根据探测形式的不同分为确定型(几何型)和概率型(解析型)。确定型方法依据航空器性能参数、历史飞行数据等信息,结合轨迹预测方法,如基于动力学模型预测航空器的位置[12],进而根据航空器之间保护区的重叠情况判断其是否存在冲突,但是该方法不适用于在飞行过程中具有较强机动性的无人机。概率型方法主要根据航迹误差和冲突域建立概率冲突探测模型判断未来一段时间发生冲突的可能性大小[13],主要使用复杂网络[14]、布朗运动[15]等方法。对于低空空域中机动性较强的航空器,采用蒙特卡洛算法模拟计算碰撞概率[16],但蒙特卡洛算法需要大量的轨迹样本以获得较高的估计精度。随着人工智能和机器学习等技术的发展,现阶段对于无人机概率型冲突探测方法的研究逐渐与集成学习、神经网络等算法相结合。如Chen 等[17]基于高斯过程和深度神经网络构建了深度高斯过程框架,对飞行轨迹进行预测以实现概率冲突探测,提高了计算精度。确定型与概率型冲突探测方法对比如表3 所示。

表3 确定型冲突探测与概率型冲突探测方法对比Tab.3 Comparison between deterministic conflict detection and probabilistic conflict detection methods
考虑低空空域飞行冲突探测的可靠性和实时性要求,当前研究面临的挑战及需要解决的核心问题包括以下方面。
1)合作型无人机配备合作型探测设备,可以建立无人机之间的通信关系,而非合作型无人机并不能直接建立彼此之间的通信,其主要通过使用光电传感器、雷达、红外传感器、声学传感器、视觉传感器和多源数据融合的方法对周围环境进行感知,可以在一定范围内主动探测各类航空器和其他入侵目标,但非合作探测设备的性能容易受到无人机飞行姿态和周围环境的影响,可能出现探测盲点。
2)确定型冲突探测方法简单直观,实时性强,但由于航空器运动过程中容易受到天气等不确定信息的影响,航空器之间并不是严格的几何位置关系,导致飞行冲突预测误差较大。概率型方法可以对飞行过程中可能产生的不确定因素进行建模,贴合实际飞行情况,计算精度高于确定型方法,但计算时间和计算复杂度较高。
3 低空空域风险评估及预警告警
根据无人系统规则制定联合体(joint authorities for rule making on unmanned systems,JARUS)提出的特定运行风险评估(specific operations risk assessment,SORA)相关规定,低空空域无人机相关风险可分为地面风险和空中风险。在无人机空中风险评估中,重点研究地理围栏、探测与避让系统和前方检测导致的碰撞避免[18]。空域中的安全风险指现有危害的后果或预计危害发生的可能性及严重程度。空中风险的严重程度主要根据伤害水平或对人类、环境和无人机本身造成的影响进行估计;而冲突可能性主要指通过冲突探测计算得到危险飞行行为或事件发生的可能性或频率,冲突概率的计算精度决定了预警的准确程度,精度越高准确度越大[19]。无人机地面风险评估主要是对无人机坠毁模式[20]、地面撞击动能[21]和由于无人机故障造成的碎片伤亡[22]进行深度分析。地面碰撞风险评估模型用于确定不同因素对预期安全水平的影响,通过每小时飞行的地面死亡事件(E/h)表示。文献[23]通过融合动力学模型和深度学习模型以动态评估无人机的地面风险,并构建了具有时空特征的地面风险地图。对地风险的影响因素包括无人机尺寸、断电时的无人机动能以及无人机飞行附近的人口密度等,通过计算满足不同无人机类别安全目标等级所需的系统可靠性,构建多因素影响评估模型,得到无人机对地安全风险。
无人机风险评估及预警告警相关的研究重点在于综合评判危险飞行行为,划分风险等级,对发生可能性高的冲突提前预警告警,提高飞行安全及无人机管理水平。冲突探测告警系统采用的避让告警算法因检测技术、避让策略和告警机制不同而不同[24]。围绕低空空域风险评估及预警告警技术,当前研究面临的挑战及需要解决的核心问题有以下2 方面。
1)冲突风险评估涉及冲突概率和严重程度2 方面,考虑复杂低空环境参数的影响,如何构建准确、高效的风险评估模型是研究的核心。例如,将离线风险评估和在线风险评估相结合,将静态风险地图转化为时变的动态风险地图,以实时度量无人机运行空中风险和对地风险,是现有研究的一个重要方向。此外,不同类型风险的影响后果存在显著差异,如无人机坠落对建筑物、地面车辆、行人的损伤等,需要进一步研究,如何度量不同风险的等效安全水平。
2)漏警率和虚警率是评价冲突预警告警技术的2 个重要指标。目前,无人机主要使用的预警告警设备是TCAS Ⅱ,但TCAS Ⅱ在1 000 m 以下的低空中虚警率较高,且在微型和轻型无人机上由于负重载荷的限制难以广泛应用。此外,在同样的预警设备下,预警区范围设置越大,漏警率越低,虚警率越高,因此,需要考虑漏警率和虚警率之间的权衡,合理设置预警阈值。
4 总结与展望
低空环境下无人机飞行冲突识别和风险评估是实现无人机安全管理的重要技术手段,在融入民用空域之前,实现城市低空空域的规范化、安全化、精细化和智能化管控,涉及法律法规标准﹑冲突风险探测﹑安全间隔标准﹑安全风险评估等诸多方面。根据既有研究,对低空中无人机安全运行所涉及核心问题的相关理论、方法进行了综述,得出结论如下。
1)在低空空域无人机的轨迹预测与意图识别方面,既有研究主要通过运动学建模或机器学习的轨迹预测模型作为无人机意图识别的手段开展研究,结合不同类型无人机的飞行特性,基于无人机的历史轨迹,通过建立简化而精确的运动学方程、对算法进行改进及数据选择和处理的不断增强等角度刻画无人机未来飞行意图的不确定性,以期实现高精度和高效率的轨迹预测效果。
2)在低空空域无人机飞行冲突探测方面,从时间、对象和类型3 个角度对冲突探测方法进行划分,在无人机轨迹预测的基础上,考虑合作型与非合作型无人机不同冲突探测方法及时间需求,选择不同的冲突探测形式。确定型方法适用于空域环境较简单,影响因素容易确定的情况;概率型方法能对在不确定因素影响下的冲突进行量化,更加符合实际飞行情况。
3)在低空空域无人机风险评估等级划分及预警告警方面,针对低空空域中的轻小型及以下无人机的分离间隔标准、风险等级划分等内容,目前国内外尚未形成统一规范的法规和开发标准。许多无人机领域的研究人员正不断积极推进行业标准的制定,借助机载探测设备、飞行状态数据和相关评估模型,设计准确可行的风险评估方法和预警告警准则,推动无人机早日融入国家空域系统。
在低空空域高密度化的发展趋势下,空中交通态势变得愈加复杂,随着相关研究的开展与深入,未来低空中无人机的冲突识别与风险评估技术仍有较大发展空间。本文基于当前低空交通安全保障技术方面存在的挑战,提出了以下几点可供研究的方向,为后续研究的深入提供参考。
1)定义低空无人机安全分离间隔标准,通过动态保护区的设置提升低空空域的安全性和使用率。低空中无人机的安全间隔尚未有统一规范性的分离标准,如何根据场景合理设定无人机或建筑物的动态保护区模型,界定不同场景下安全分离标准和避免碰撞的相关性,以确保空域的安全性和高效性是近年来的一个研究重点。
2)融合多源数据,通过集成模型提高轨迹预测和意图识别精度。不同轨迹预测模型的优缺点和适用场景不同,作为飞行冲突探测的基础,轨迹预测的精度进一步影响探测水平的准确性,借助多模型融合的方式集成不同方法的优势也是未来需要研究的方向。
3)构建风险综合评估指标体系,通过动态风险地图,实现风险态势实时感知与前驱诊断。低空无人机飞行的整体安全水平取决于多种因素,如何将无人机运行过程中产生的实时风险转化为动态风险地图,通过预测综合风险指标实现安全态势的实时感知和前驱诊断是需要进一步研究的问题。
4)模拟多场景下的空域模型和交通运行主体,通过构建航路网络和优化交通规则提高预警准确率和解脱效率。低空空域无人机在飞行时具有时间和空间上的高度不确定性,如何通过模拟不同空域模型下交通异质场景,设计稳定的低空航线网络,进行场景、设备、规则和流程的标准化,以具有高实时性、规模可扩展性和整体安全性是进一步研究的方向。
