运用路径动态预览模型的低速智能汽车侧向跟踪控制研究
2024-01-22王丽娟关龙新张明华时乐泉王爱春吴晓建
王丽娟,关龙新,,张明华,,时乐泉,王爱春,吴晓建,
(1. 南昌大学 机电工程学院,南昌 330031;2. 江铃汽车股份有限公司,南昌 330001)
随着5G通信和人工智能技术的迅速发展,自动驾驶成为汽车行业研究热点[1-2],发展自动驾驶技术在许多国家已提升到战略层面。考虑到当前高级别自动驾驶技术在复杂城市道路下全面实施仍存在较大挑战,园区低速场景自动驾驶技术具备落地可行性。因而,开展低速情况下路径跟踪控制[3-4]具有重要应用价值。
近年来,国内外学者对车辆的侧向跟踪控制开展了大量的理论研究和验证。日本东京大学的Ando等[5]通过设计RTK-GNSS/INS和激光雷达的组合定位方式以及采用线性LQR控制器精确实现横向控制。密歇根大学的Xu和Peng[6]基于自行车模型设计了单点预瞄的线性二次型控制器,并将道路曲率增广为状态向量,构建了LQR控制系统以提高侧向跟踪精度。Yu等[7]考虑了轮胎特性,设计了前馈加反馈的侧向跟踪控制器。陈亮等[8]基于最优前轮侧偏力,设计了LQR横向控制器。以上文献侧向控制器均考虑了动力学特性,且在较高速度工况下能够实现较好的跟踪效果,为发展适用于基于动力学模型的线性二次型算法作了积极探索。但在低速场景下,轮胎受力影响较小,若采用以上基于迭代求解的方法反而会增加车载工控机的计算负荷。
针对低速场景,Morales等[9]设计了一种基于二维激光扫描仪以反应性地获取目标点的纯跟踪控制方法。新加坡国立大学的Andersen等[10]通过考虑追踪点的航向方向问题,提出了一种改进的纯追踪算法来解决切角和超调问题。Shan等[11]提出一种基于驾驶经验获取车速,道路前方曲率和前瞻距离的三者关系设计模糊控制器动态调整前瞻距离的纯跟踪算法。李爽等[12]提出一种依据车辆实际行驶路程、以固定预瞄时间及自车车速间接获取预瞄点侧向位移的弧长预瞄方法,推导了预瞄点侧向位移与车辆前轮转角之间的关系,并建立了侧向跟踪控制模型。以上文献对基于几何运动学的纯跟踪算法均作了改进和创新,但预瞄距离是基于车辆当前车速而设计的,尚未考虑跟踪前方轨迹所规划的速度可能存在变化,不能更好地体现智驾车辆在未来一段时域内对规划路径的预测。
本文提出一种结合规划路径和规划速度信息的动态预瞄距离跟踪控制算法,提升自车对运动规划路径在未来一段时域内的预测能力,使预瞄距离具备基于实时规划速度的适应性,更好地达到实时更新路径预览曲线,实现动态调整车辆跟踪点的目的,同时满足低速场景下更低算力及更高精度的要求。为此,本文基于该设计方法,最终获取具有速度自适应性的前视距离-车辆前轮转角关系。在CarSim和MATLAB/Simulink联合仿真环境下验证算法的有效性和准确性,最后在实车平台进行进一步地验证,并对实验结果作深入分析。
1 运用规划路径及速度的动态预瞄距离的路径跟踪控制设计
1.1 路径跟踪控制律
纯跟踪算法是卡内基梅隆大学学者提出的路径跟踪控制算法[13]。图1分别给出了纯跟踪控制算法在行车和倒车时路径跟踪的原理图。

图1 行车和倒车控制分析Fig. 1 Analysis of travel and reverse control for intelligent vehicle
1.1.1 行车跟踪控制
如图1a)所示,点A(xa,ya)为车辆后轴中心,参考路径点C(xc,yc)为某时刻期望路径点,C点也被称为预瞄点,前视距离ld为预瞄点与车辆后轴中心点的欧氏距离。车辆航向方向为向量AB的方向,前轮转角为δf,转弯半径为R,由此可得
ld=2Rsinα
(1)
由几何关系可求得α和前视距离ld为:
(2)
(3)
式中:α为车辆后轴中心与预瞄点连线的航向与车辆行驶航向的差值;θyaw为车辆的行驶航向。
根据阿克曼转向原理,可求得前轮转角δf为

(4)
由式(1)和式(4)可得

(5)
联立式(2)、式(3)和式(5),可求得最终的前轮转角δf为
(6)
式中L为车辆轴距。
1.1.2 倒车跟踪控制
(7)
行车和倒车过程中车辆航向角相差180°,故需要对其进行弧度角归一化处理,将倒车时的航向角范围统一限定在(-π,π),防止方向盘转角发生突变,同时有助于加快收敛,提升控制算法的效率。故有

(8)


(9)

(10)
(11)
(12)

1.2 路径动态预览模型
参照人工驾驶经验,路径跟踪实质为预瞄-跟随反馈闭环过程,且预瞄距离应具有速度适应性。目前,预瞄距离是基于车辆当前车速而设计的,尚未考虑跟踪前方轨迹所规划的速度可能存在变化。本文提出结合规划路径和规划速度信息的动态预瞄距离方法,即考虑未来的车速状态对预瞄距离进行动态调整,从而获取具有速度自适应性的前视距离-车辆前轮转角关系。
几何学跟踪控制模型与参考路径如图2所示。依据规划轨迹的属性,设计路径动态预览模型,以车辆后轴中心坐标A(xa,ya)作为车辆当前点,遍历参考路径所有离散点寻找到欧式距离最短的车辆匹配点Pk(xk,yk),以车辆匹配点为起始点动态预览路径曲线长度为ΔS处的预瞄点npre(xn,yn,dθyaw),预瞄点npre即为车辆跟踪的目标路径点。

图2 几何学跟踪控制模型与参考路径Fig. 2 Geometric tracking control model and its reference path
由几何关系近似可求得ΔS,即
i=k,k+1,…,n
(13)
根据式(2)和式(3)可求得前视距离ld_pre和γ_pre为:

(14)
(15)
式(13)~式(15)中:n为路径动态预览点的个数;γ_pre为车辆后轴中心与预瞄点连线的航向与车辆行驶航向的差值;Ts为采样时间;vi为规划速度。
当预览路径点的数量n大于剩余参考路径点的数量时,则未来每一时刻车辆跟踪的目标路径点均为参考路径的最后一个点nend(xend,yend,dθend),同理可近似求得以车辆匹配点为起始点动态预览路径的曲线长度ΔS*为
i=k,k+1,…,nend
(16)

(17)

(18)
2 侧向跟踪控制
本文提出的基于路径动态预览模型的低速智能汽车侧向跟踪算法,如图3所示。考虑未来行驶轨迹中速度的变化,以规划速度实时动态调整预瞄距离,从而获取车辆在下一时刻的路径跟踪点,其预览机制更具合理性。

图3 基于路径动态预览模型的侧向跟踪算法Fig. 3 Lateral tracking algorithm based on the dynamic preview path model
在路径动态预览点的个数n小于剩余参考路径点的总数量时,联立式(5)、式(14)和式(15)可求得前轮转角δfpre,计算车辆当前点与预瞄点的侧向跟踪误差ed和航向误差eφ分别为:
(19)
ed=(xn-xa)sin(dθyaw)+(ya-yn)cos(dθyaw) (20)
eφ=θyaw-dθyaw
(21)
式中:δfpre为本文设计的纯跟踪算法的前轮转角,dθyaw为预瞄点npre的参考航向。


(22)
(23)

(24)
3 实验结果与分析
3.1 仿真实验
3.1.1 仿真平台介绍
CarSim和MATLAB/Simulink联合仿真平台由CarSim提供车辆动力学模块,MATLAB语言编写控制器代码,同时在MATLAB/Simulink环境下导入参考的跟踪路径,从而实现闭环仿真。其中仿真参数转向系角传动比为15.9,轴距L为2.865 m。
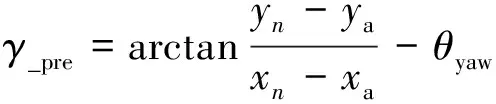
3.1.2 双移线工况与复杂场景工况
为了验证本文提出的跟踪算法的可行性和高效性,建立如图4a)所示的双移线工况作为仿真实验的测试场景一,仿真时间设置为100 s,车辆行驶车速为7 km/h。建立如图4b)所示的连续弯道工况作为仿真实验的测试场景二,进一步验证本文算法的高效性和准确性,其仿真时间为44 s,车辆行驶车速为28 km/h。
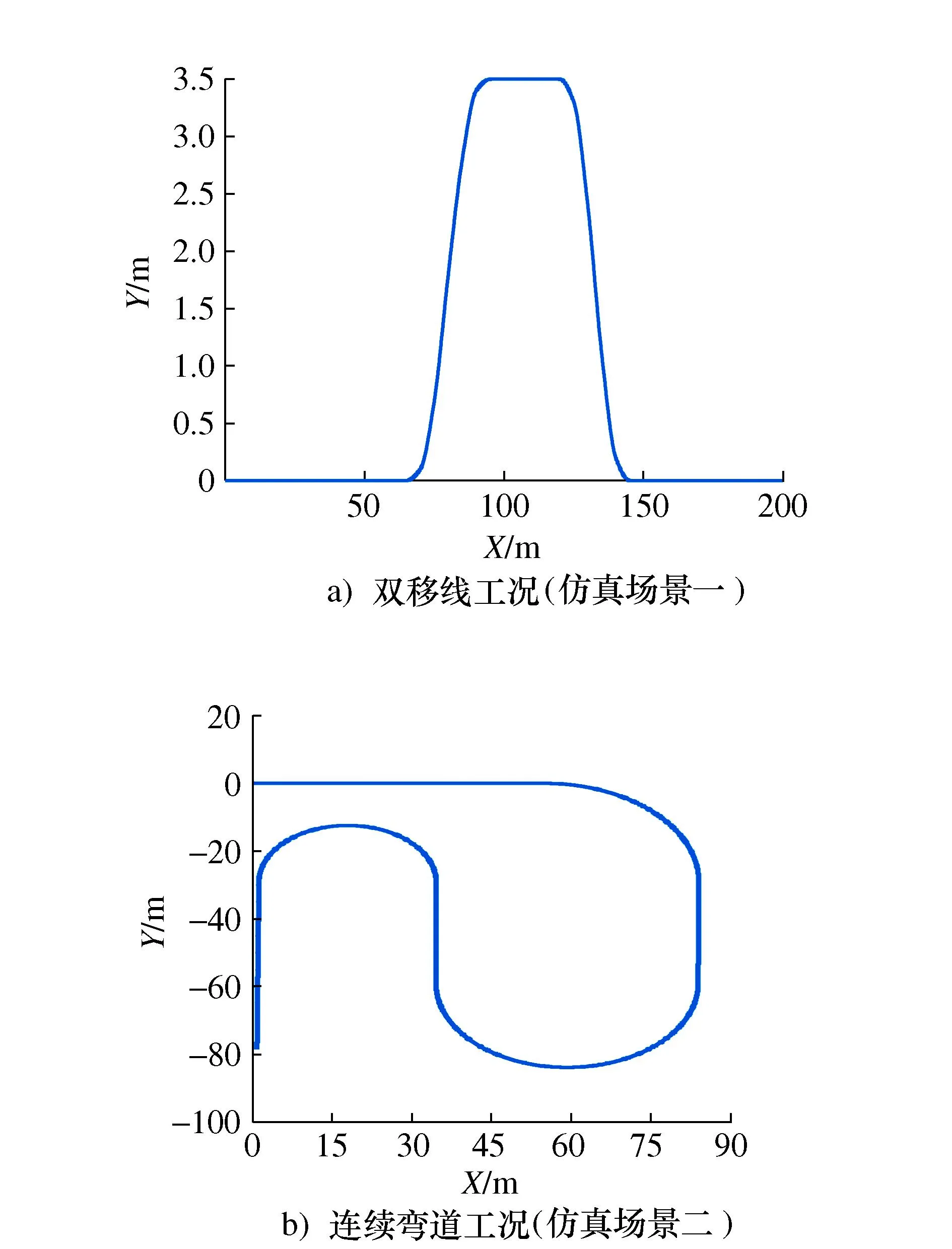
图4 双移线与复杂场景工况Fig. 4 Double-lane change and complex scenario conditions
3.1.3 路径跟踪仿真实验
在CarSim和MATLAB/Simulink联合仿真平台中,应用场景一进行行车和倒车工况下算法仿真验证,应用场景二进行中低速工况下算法控制效果验证,仿真结果如图5~图7所示。

图5 测试场景一行车时的路径跟踪控制效果(7 km/h)Fig. 5 Path tracking control performance in test scenario one while traveling (7 km/h)

图6 测试场景一倒车时的路径跟踪控制效果(7 km/h)Fig. 6 Path tracking control performance in test scenario one while reversing (7 km/h)
图7 测试场景二-中低速工况跟踪控制效果(28 km/h)Fig. 7 Path tracking control performance for low-speed conditions in test scenario two (28 km/h)
仿真场景一中,车辆行车测试的初始状态为:后轴中心坐标(x0r,y0r)为(0,0),φ=0,δ=0,车辆以7 km/h的速度跟踪期望路径。由图5可知:最大侧向误差为0.016 9 m,质心处最大航向误差为5.768°,基本稳定在4°以内。同时,仿真车辆倒车测试的初始状态为:后轴中心坐标(x0r,y0r)为(0,0),φ=180°,δ=0,车辆同样以7 km/h的速度跟踪期望路径。由图6可知:该控制器的最大侧向误差为0.028 6 m,质心处最大航向误差为5.015°,基本稳定在4°以内。在场景二大地坐标系下,车辆以28 km/h的速度跟踪大曲率弯道路况。由图7可知:最大侧向误差为0.079 7 m,基本稳定在0.05 m以内,质心处最大航向误差为7.165°,基本稳定在5°以内。
仿真实验结果显示,场景一行车测试中的侧向跟踪精度优于倒车测试,但航向跟踪精度劣于倒车测试,主要原因是行车和倒车时的预览距离不一致。两种工况虽存在一定差异,但总体上跟踪精度保持在0.03 m以内。在场景二中,以中低速工况跟踪连续大曲率弯道,其跟踪精度保持在0.08 m以内。通过仿真实验验证,证实本文提出的基于路径动态预览模型的纯跟踪控制方法具有可行性和准确性。
3.2 实车实验
3.2.1 实验平台介绍
以某品牌车辆为实车实验平台,其参数如表1所示。

表1 实车测试车辆参数Tab. 1 Tested vehicle parameters
该测试车辆低速自主泊车系统架构主要有车载工控机计算单元、环境感知模块、高精地图、RTK定位模块、决策规划模块、控制模块及汽油车智能底盘。图8为低速自主泊车系统架构。

图8 低速自主泊车系统架构Fig. 8 Low-speed autonomous parking system architecture
环境感知模块结合高精度地图通过摄像头、超声波雷达等传感器获取有效车位及障碍物信息实现车位寻找和有效避撞;RTK定位模块获取车辆实时定位信息以确保规划和控制的精度达到厘米级;决策规划模块实时规划稳定连续的轨迹以确保跟踪控制的稳健性;控制模块计算最优控制量精准控制智能汽车自主泊入车位;计算单元包含一台高效算力的车载工控机,各个模块并行计算,通过机器人操作系统实现模块间信息的高效交互。
3.2.2 定位方式GNSS/INS
GNSS/INS组合导航系统是无人驾驶汽车高精度导航定位的关键技术之一,具有自主性强、导航参数完备、短时精度高和隐蔽性好等优点[14]。在本次实验车辆中安装了完备的组合导航(GNSS/INS)设备,如图9所示,分别为车载天线和惯性测量单元IMU(加速度计和陀螺仪),由惯性测量单元获取车辆线运动和角运动参数并基于航位实时获取车辆的位姿信息、速度信息,为本文设计的侧向跟踪控制算法实现精准跟踪参考路径提供了定位条件。

图9 车载天线和IMUFig. 9 Vehicle antenna and IMU
3.2.3 路径跟踪实车实验
为确保本次实车实验的安全性,实验场地选择在某园区露天停车场,测试车辆车速为7 km/h。测试共分为两个场景:第一个为大曲率垂直弯道,目的是验证本文设计的算法对大弯道场景下的鲁棒适应性,同时与文献[15-16]中基于动力学模型的线性LQR算法作控制效果和计算消耗做对比;第二个场景为自主泊车场景,用于检测本文设计的算法在泊车场景下的控制效果。
如图10和图11所示,在大曲率垂直弯道场景测试中,本文设计的算法最大侧向跟踪误差和航向误差分别为0.069 2 m和0.109 8 rad,基于动力学模型的线性LQR算法在左右弯道场景测试的最大侧向跟踪误差和航向误差分别为-0.124 1 m、-0.127 6 m和0.125 5 rad、0.089 8 rad。

图10 本文算法与线性LQR算法侧向跟踪误差效果比对Fig. 10 Comparison of the effect of lateral tracking error between proposed algorithm and linear LQR algorithm
图12为本文算法与线性LQR算法基于某型号车载工控机单次求解时的计算时间比对。本文算法平均求解一次耗时0.056 3 ms,线性LQR算法平均求解一次耗时1.356 9 ms。图13为本文算法在自主泊车场景下的控制效果,其最大的侧向跟踪误差和航向误差分别为0.153 0 m和0.151 5 rad。实车测试结果中,在大曲率垂直弯道测试场景下,本文设计的算法跟踪精度总体上优于基于动力学的线性LQR算法,同时,计算效率也优于LQR算法。主要原因是基于动力学模型的LQR算法迭代次数更多,计算消耗更大,而本文设计的侧向跟踪算法,考虑跟踪前方轨迹所规划的速度可能存在变化,达到实时动态调整预瞄距离的作用,具备更低计算消耗和更高跟踪精度的优势。

图12 本文算法与线性LQR算法计算时间对比Fig. 12 Comparison of computation time between proposed algorithm and linear LQR algorithm
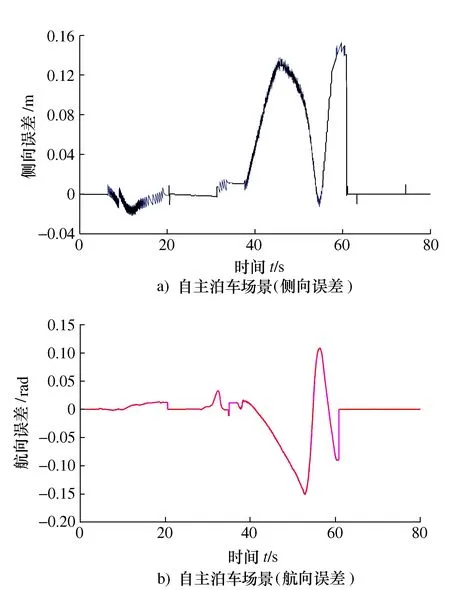
图13 本文算法在自主泊车场景的应用Fig. 13 Application of proposed algorithm to autonomous parking scenarios
4 结论
本文提出了一种结合规划路径和规划速度信息的动态预瞄距离跟踪控制算法,能够提高智能汽车在低速侧向跟踪控制的精确度。仿真实验结果中,低速场景一中最大侧向误差保持在0.03 m以内,质心处最大航向误差保持在6°以内,中低速场景二中跟踪精度保持在0.08 m以内,质心处最大航向误差保持在7°左右,表明本文提出的控制策略具有可行性和准确性。
实车实验结果中,在大曲率垂直弯道场景下,本文算法最大跟踪误差和航向误差分别为0.069 2 m和0.109 8 rad,其平均求解一次耗时0.056 3 ms,线性LQR算法平均求解一次耗时1.356 9 ms。结果表明:低速场景下本文算法跟踪精度和计算速率均优于基于动力学模型的LQR算法,满足低速环境下智能汽车路径跟踪的要求。同时,弥补了智驾系统感知模块模型训练时算力不足的缺陷。
