基于农业搬运机器人的障碍物视觉识别技术研究*
2024-01-13孙小春
余 娜 ,晁 阳 ,孙小春 ,卿 笛
(杨凌职业技术学院,陕西 咸阳 712100)
农业搬运机器人是农业现代化发展的必然产物,机器人在运输过程中需要多个传感器协作完成障碍物识别的搬运过程。为了有效提升机器人故障检测和识别的性能,需要充分利用现代软件计算的优势,采集障碍物的表征信息,为机器识别提供检测依据。为了有效提升障碍物表征信息采集的准确性和精细性,课题组基于障碍物图像检索的方法开发了一种机器视觉障碍物特征提取优化系统[1]。将数据库中采集到的图像特征进行表示后,通过相似度测量,可提升障碍物识别的精确性。基于当前搬运机器人障碍物检测的研究现状,即采用单目视觉处理的方法进行障碍物识别、机器人自主定位与障碍物检测,将检测的障碍物信息插入采集的障碍物特征地图中,从而实现搬运机器人自主定位和自动检测的效果。文章在当前研究的基础上,利用内容图像检索(CBIR,Content Based Image Retrieval)方法优化搬运机器人障碍物图像检测性能,并且通过实验检测了机器人在运行过程中对故障识别的有效性[2]。
1 CBIR系统优化设计
搬运机器人的CBIR 系统主要是依靠现代机器视觉等技术实现障碍物图像数据的采集和传输处理。将采集的障碍物图像数据发送到控制服务器中,保障障碍物信息的准确采集和管理。采集意向信息之后,机器人的机器视觉识别系统在运行过程中不断进行图像捕捉,并向外界展示障碍物的实际信息,为后续其他处理做准备[3]。基于此,为了有效检索匹配采集的图像,对机器人的CBIR 系统进行优化,CBIR 系统优化结构图如图1所示。
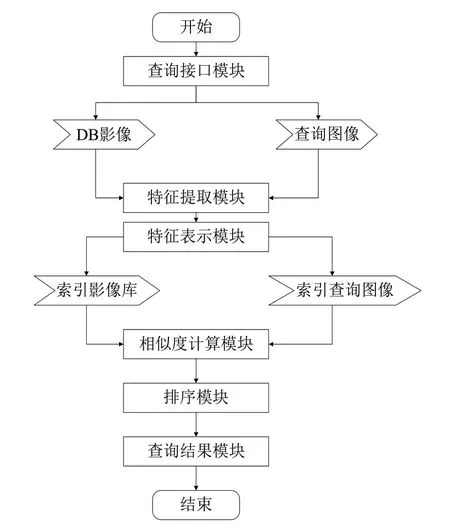
图1 CBIR 系统优化结构图
为了提升固体障碍物识别功能,需要确保机器视觉采集的图像数量和质量。该系统构建了多方位障碍物图像信息采集摄像头,可将采集的图像与数据库中的图像特征进行对比,文中的数据库留存了搬运机器人搬运路径途中的固体障碍物图像,并且将多个角度采集到的图像进行了编号[4]。同时,为了方便处理,系统将采集到的RGB 图像转换为灰度图像,通过优化后的距离度量方法来减少检索过程误差。目前常用的距离度量方法有巴特查里亚、余弦、欧几里德、卡方等集中计算方法,而文章中优化的CBIR 系统采用的方法是对图像间的最小距离进行度量并排名,计算获得的结果可以用于对比分析检测图像与数据库图像。
2 障碍物边缘特征提取优化
2.1 障碍物边缘特征提取概述
搬运机器人的搬运路径在进行障碍物的边缘特征提取之前,需要去除不符合障碍物边缘的其他干扰特征。在提取障碍物边缘特征时,对图像进行预处理,避免图像检测在各种不同的外部条件和随机干扰的环境下,导致机器视觉识别系统采集的图像产生噪声和图像失真的情况,从而影响视觉系统的精确性。首先需要对采集图像进行对比度增强,提升图像的平滑性。而障碍物的边缘特征图像采集有着不连续性局部特征的特点,不规则的局部特征是局部亮度变化最大的图像部分[5]。通常来说,在捕捉障碍物的场景图像之后,经过一系列的纹理特征提取就可以提取出边缘轮廓。这些轮廓对搬运机器人运行路径中的障碍物识别和定位具有重要的作用。
为了优化检测边缘性能,采用基于边缘图像像素的灰度级差异方法,提取图像的轮廓,通过将图像边缘所包裹的像素清空,并且保留图像的轮廓。边缘检测算法通过四个维度算子优化图像强度的一阶数和二阶数,改善图像噪声边缘效率。同时,需要增强障碍物轮廓点边缘强度的变化,并且通过图像检测和位置检测,确定障碍物边缘检测的精细度[6]。
2.2 固体障碍物特征提取算法2.2.1检测低噪声图像边缘算法
为了检测采集图像的低噪声边缘,利用Gabor 小波滤波提升噪声检测边缘的效率,进一步提高边缘检测的分辨率。该算法通过短期傅里叶变换与高斯窗口结合,并且通过Gabor 滤波器过滤采集图像的纹理进行数字信号变换,进而提升障碍物识别的精确度。Gabor 小波滤波器数字信号转换的方法为:
其中,s(t)表示数字信号;(b,a)分别表示的是转化因子和膨胀因子;h(t)表示基本小波[7]。
小波滤波器将信号s(t)分解为小波函数集,并且通过转化因子及膨胀因子在时空域及频域中提升图像的分辨率。小波滤波器的二维函数为:其中,φ 表示高斯分布在x 轴及y 轴方向的变体;ω0表示正弦曲线的频率;θ 则表示正弦曲线的方向。
该函数表现形式体现了Gabor 基本函数表征为一个二维的高斯,通过该频率范围值以及方向为θ 的正弦曲线的包围和调制功能来确定滤波器的参数。由于掩码尺寸的大小会影响图像检索的精度,因此需要以适合的滤波器大小来确定障碍物的位置[8]。根据该基本函数选定的滤波组件来构建空间域滤波器,并且滤波器的每对元素可以通过正弦曲线的实部和虚部实现优化。在同一中频级过滤时,滤波器的输出是对图像中所有卷积像素的虚实滤波器掩码平均卷积进行输出调节,其计算公式为:
其中,ζ 表示滤波器输出调节的大小;Rave表示Gabor滤波器掩码对图像区域进行卷积的结果;Iave是利用滤波器虚掩码对图像区域进行卷积的结果。
综上,利用Gabor 滤波器进行图像特征提取,提升搬运机器人在运输过程中对障碍物形状和位置的评估和定位精确度,以提高搬运机器人运输的高效性[9]。
2.2.2 评估方法
通过滤波器将采集的图像进行数字编码,为算法计算提供数据支持,并为后期图像噪声消除、提升采集图像质量提供强有力的支持。为了检测该方法对搬运机器人运输的有效性,在文章的CBIR 系统中设定5 种距离,将这5 种距离分为低、中、满、淹没和溢出5 种情况。将Gabor 小波滤波器采集的障碍物图像通过数字转化之后,将该数据与系统数据库中的障碍物图像进行检索对比,从而获取构建的CBIR 系统对障碍物识别的精细度和准确性[10]。
主要采用准确率和召回率的加权调和平均数进行比较的方法,与采集图像的检索数量和质量进行对比,从而检测系统利用Gabor 滤波器对障碍物图像边缘检测的有效性,有效提升搬运机器人的视觉识别系统性能。通过公式(4)、公式(5)、公式(6)可以分别计算出系统的准确率、召回率以及F1 测度。
其中,R 表示召回率,na表示检索出相关图像的数量;nb表示数据库中相关图像的数量;A表示准确率;nall表示检索图像的总数[11]。
3 CBIR系统优化实验结果
为了验证CBIR 系统对搬运机器人障碍物识别的精确度,利用MATLAB 仿真平台对该系统性能进行仿真实验,将200 个障碍物图像边缘检测精确度进行对比。经过仿真实验,几种相似度距离的检索率如表1所示。
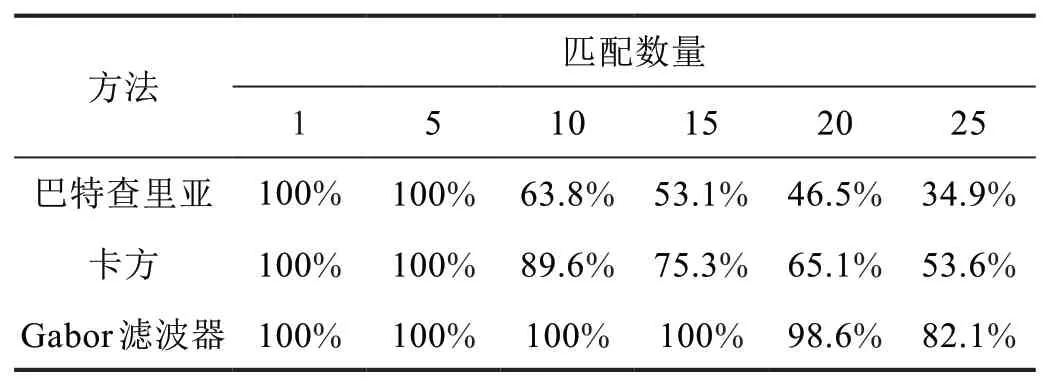
表1 不同方法下的障碍物机器视觉识别检索率对比
从表1 可以看出,文章利用小波滤波器优化的CBIR 系统的对比结果优于其他方法的平均检索率,甚至在过滤器到障碍物距离的测算中,前20 张图像之间的检索率均保持在98%以上。该方法有效提升了CBIR 系统的性能,并且促使搬运机器人在不同位置下均可以对运输路径上存在的固体障碍物进行定位识别,有效提升其识别系统的精确度,为系统数据库中障碍物图像特征对比提供高质量图像数据。
4 结语
综上所述,为了提升当前农业现代化发展过程中搬运机器人的故障识别和检测CBIR 系统性能,课题组从提升障碍物图像采集的数量和质量入手,使用Gabor 小波滤波器对采集图像的边缘信息进行数字化采集,以优化采集图像的质量,提升采集图像与数据库图像对比效果的准确性。同时,以MATLAB平台为仿真工具,与其他边缘检测特征提取方法进行对比,即将文章优化的CBIR 系统的度量方法得到的距离结果与其他边缘检测特征提取方法得到的距离结果进行对比。并且根据平均检索率对采集的图像数量和质量进行比较发现,农业搬运机器人在复杂的工作环境下,也可以保障采集的图像与数据库中的每张图像实现精细的特征提取,确保采集图像与数据库的图像可以进行相似度对比。总的来说,文章优化的CBIR 系统可以对障碍物图像的纹理特征进行精细化提取,并且在不同距离下均具有良好的障碍物检测性能。
