液压支架电液控制系统总线通信故障检测与诊断方法
2024-01-12杨永锴张敏龙许春雨宋建成田慕琴宋单阳张晓海聂鸿霖
杨永锴, 张敏龙, 许春雨, 宋建成, 田慕琴, 宋单阳, 张晓海, 聂鸿霖
(1. 太原理工大学 矿用智能电器技术国家地方联合工程实验室,山西 太原 030024;2. 太原理工大学 煤矿电气设备与智能控制山西省重点实验室,山西 太原 030024;3. 晋能控股装备制造集团金鼎山西煤机有限责任公司 支架制造分公司,山西 晋城 048006)
0 引言
随着液压支架电液控制系统智能化进程的不断推进,通信系统的可靠性与稳定性对于保障工作面高效稳定连续生产具有重要意义[1]。《煤炭工业“十四五”科技发展指导意见》提出要有序推动智能化矿山建设。目前综采工作面液压支架电液控制系统涌现出了多种多样的智能化功能,如采煤机定位、矿压监测与顶板灾害预警、故障诊断与寿命周期管理等,这些智能化功能的实现均依赖于电液控制系统的通信总线传输数据[2]。因此,液压支架电液控制系统的通信稳定性直接影响整个综采工作面的智能化程度[3]。
现有的液压支架控制系统普遍采用CAN 作为通信总线,针对永久性故障节点实施故障封闭处理方式,解决了通信系统的故障信息通信冲突问题[4]。但由于CAN 总线通信的多主结构,当网络中某一台支架控制器由于通信硬件受损或受外界干扰从总线上“掉落”时,总线上其他设备之间通信并不会受到影响,采用CAN 总线通信的电液控制系统不会对该控制器的“掉落”现象及时做出反应,也不能对该故障准确定位并及时处理,可能导致工作面生产的安全事故[5]。因此,研究CAN 总线通信故障检测和诊断方法具有重要的现实意义。
国内外学者针对CAN 总线故障检测技术做了许多有益的探讨。文献[6]设计了一种便携式CAN 总线分析设备,能够快速定位故障节点,方便井下排查故障信息,具有很高的可靠性。文献[7]设计了大数据故障诊断引擎,通过对各类数据的采集与分析,对故障类型进行匹配,实现了对故障的精准识别与定位。文献[8]针对基于CAN 总线的支架电液控制通信系统,提出通信网络透明化设计方案,能够将通信网络的实时性能及故障信息可视化地呈现给用户。
尽管国内外学者就CAN 总线故障检测方法进行了深入研究,但是在故障检测的实时性、数据传输的稳定性和故障诊断的准确性方面还存在问题。本文根据综采工作面通信技术要求,设计CAN 总线通信系统故障保护电路,研究基于CAN 总线通信协议融合令牌环网的故障诊断方法,并提出面向全工作面的故障预警方法。该方法将令牌环网传送信息所具备的可调整性和确定性结合到液压支架总线通信中,能够准确快速地对故障点进行报警,且令牌帧结构所含信息量较少,对总线的负载率影响较小,实时性与准确性较高。
1 液压支架电液控制系统
液压支架电液控制系统由3 层网络结构组成,即支架控制器工作面操作系统、端头控制器集中控制系统和工作面巷道计算机监控系统[9],如图1 所示。支架控制器工作面操作系统主要完成工作面液压支架的数据采集与液压支架控制命令的下发;端头控制器集中控制系统一方面将支架控制器采集到的信息上传给上位机,另一方面完成集中控制命令的下发;工作面巷道计算机监控系统对上传的信息进行统计分析[10]。工作面巷道计算机与端头控制器之间通过以太网传输数据,端头控制器与支架控制器之间通过CAN 总线通信。在CAN 总线通信网络中通常有150~180 台支架控制器挂载到总线上,通信距离达500 m 以上,因此需要4~6 个控制器搭配1 个中继器,以保证全工作面可靠通信[11]。
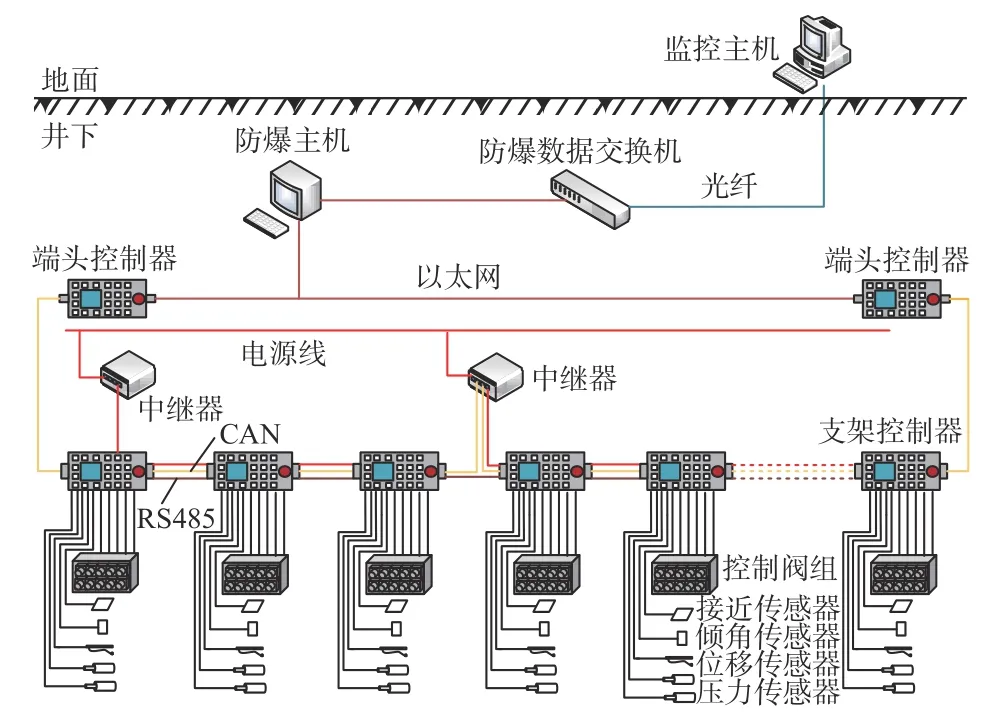
图1 液压支架电液控制系统结构Fig. 1 Structure of hydraulic support electro-hydraulic control system
液压支架电液控制系统节点数量较多、信息量大、通信距离较长,且井下工作面电磁干扰严重,因此对通信网络抗干扰能力要求较高。CAN 总线通信属于总线式串行通信网络,具有可靠性高、灵活性好、抗干扰能力强等特点[12]。但为了降低控制器物理层面上出现故障的概率,还需要设计性能良好的硬件电路。
考虑到井下工作面电磁环境复杂,通信硬件设备容易受到环境污染、电气干扰等因素的影响而损坏,要求系统硬件具备一定的抗干扰能力[13]。采用CTM8251KT 系列CAN 隔离收发器,其符合ISO 11898-2 标准,具有非常低的电磁辐射和较高的抗电磁干扰特性,自带定压隔离电源,可实现DC 3 500 V 电气隔离,并具有高静电释放保护功能,具有较高的工作可靠性。
为了进一步提高通信系统的可靠性,设计了CAN 通信保护电路,如图2 所示。

图2 CAN 通信保护电路Fig. 2 CAN communication protection circuit
在CAN 总线供电电路中,除了加入滤波电容C1来对高低频谐波进行过滤外,还并接瞬态抑制二极管DZ1来抑制瞬态脉冲,从而提高电源的供电质量。在通信电路差分信号之间,使用共模滤波器L-GM1抑制差分信号的共模噪声,提高信号质量,保护收发器免受共模干扰信号的影响;设计TVS(Transient Voltage Suppressor,瞬态电压抑制二极管)电路对差模信号进行过滤保护,抑制电网浪涌干扰;通过同一网络单点接地的保护措施来提高设备工作稳定性,并在电路中加入玻璃二极管S1,S2,承担防雷保护的任务。
2 故障检测与诊断方法
2.1 令牌环网结构设计
令牌环网是一种局域网协议,通过特有的令牌在环状网的各个节点依次传输。令牌是节点访问总线的钥匙,节点只有在获得令牌之后,才具备在总线上发送数据的权力[14]。当节点的令牌持有时间结束时,令牌便交给下一节点;如果节点不需要发送数据,则将令牌继续交给下一个节点[15]。令牌环网主要工作原理如图3 所示。

图3 令牌环网工作原理Fig. 3 Working principle of token ring network
令牌环网中主要有令牌帧和故障数据帧2 种帧结构[16]。令牌帧作为“钥匙”在环网中依照节点序号依次传输,只有拿到“钥匙”后才能向总线发送消息,由于令牌本身的功能特性,令牌帧不需要携带数据[17]。故障数据帧主要是由持有令牌的节点探测出邻架总线通信故障,从而向总线发送故障信息帧,故障数据帧需要包含故障节点信息及持有令牌节点信息。
CAN 总线的数据帧由7 个不同的位场组成:帧起始、仲裁场、控制场、数据场、CRC 场、应答场、帧结尾[18]。本文采用的帧结构如图4 所示。

图4 CAN 总线通信帧结构Fig. 4 Structure of CAN bus communication frame
令牌传递过程中本身不携带数据,因此数据场为空,故障数据帧要在数据场说明故障的控制器编号信息,因此为64 bit 数据(该数据可以随工作面控制器数量而定,本文选为最大值);帧起始代表数据开始发送,帧结尾放置在帧的末端,表明数据结束;仲裁场包含数据类别信息;控制场决定数据段所要发送的字节数;CRC 场用来检测帧的正确性;应答场表明数据帧是否被目的地点接收。
2.2 总线信息优先级划分
在实际工作面总线通信中,信息种类繁多,不仅存在故障信息,还有一些基本功能信息,如端头控制器下发的集中控制信息、急停命令等。此外,随着智能化技术的不断发展,更多智能设备被广泛使用,它们采集的信息也通过总线上传。因此,需要合理划分信息的优先级,否则会导致总线堵塞,从而引发事故[19]。
在CAN 通信协议中,一般通过数据帧的仲裁场来配置优先级。仲裁场格式分为两大类:① 扩展格式,由29 位定义地址范围,可以提供更多标志符范围;② 标准格式,沿用常规的11 位标志符范围。考虑到智能化工作面的快速发展需求,为以后大数据处理留有余地,采用扩展格式。根据液压支架电液控制系统的消息种类与信息特点,合理地对仲裁场进行划分,如图5 所示。
1) ID28—25。为保证信息发生冲突时信息的安全等级被优先仲裁,将安全等级划分置于首位。安全等级划分依据是信息的紧急性。最高等级的信息涉及到工作面安全问题,包括工作面急停、闭锁及故障报警信息;第二等级为基本的支架控制命令信息,是保证液压支架功能准确执行的必要信息;第三等级信息为实时性要求较低的智能化功能信息[20]。
为保证工作面安全及基本功能实现的可靠性与实时性,在令牌环网中,将令牌帧规划为智能化功能信息,令牌故障数据帧为故障信息。安全等级划分见表1。
2) ID24—16。随着智能化技术的发展,越来越多的智能化操作功能出现,CAN 总线上的每一类智能化功能信息均应具备唯一的标志。为预防出现功能位区资源不足的情况,设计了功能预留区。
3) ID15—8。表示发送消息的目标节点地址,即目标控制器编号,用于CAN 总线节点消息过滤。
4) ID7—0。表示发送消息的节点地址,用于区分不同节点发送的消息。
2.3 令牌传递中的故障处理
在液压支架电液控制系统中,支架控制器通过自动排序功能获得自身编号。令牌传送的过程是通过总线,由端头控制器每隔2 s 产生1 次令牌,并发送令牌到1 号支架控制器。该支架控制器收到令牌后会应答端头控制器,并将令牌标志置1。当端头收到应答之后,表明令牌传送成功,令牌标志清0。之后1 号支架控制器会向2 号支架控制器发送令牌,将令牌通过该方式依次向下传递。具体的工作流程如图6 所示。
当中间某台支架控制器发生故障时,上一台支架控制器通过总线向该控制器持续访问3 次,若未收到应答,则认为该控制器已经出现总线故障,此时上一台控制器会向总线发送包含故障信息的故障数据帧,并对令牌帧进行处理,使其跳过故障控制器,往下一台控制器发送访问命令。故障诊断流程如图7 所示。
这种令牌巡检的故障诊断方式会增加需要上传的报文数据量,加重通信总线负载。令牌轮询周期太短,将导致总线没有冗余,总线拥堵,造成优先级别较低的功能命令报文无法下发,所以需要合理设置令牌轮询周期。一般应将CAN 总线的负载率控制在30%以内,可保证可靠通信。增加令牌故障诊断报文时,总线增加的负载率为
式中: ΔA为单位时间内实际传输的令牌轮询模式下增加的字节总数;Z为理论上单位时间内所能传输的字节总数。
式中:N为总节点数; Δb为故障诊断模式下增加的数据长度;T1为令牌发送的理论周期;B为总线速率;t为单位时间。
综合式(1)、式(2)和式(3)可得
本文以200 台控制器为假想对象,设计200 个节点,系统选取的CAN 总线速率为500 kbit/s,令牌成功传送1 次时,所发送的报文包括令牌帧、故障数据帧。当故障节点较多时,总线上的负载率会增加,增加值为
CAN 总线速率为500 kbit/s 时,由文献[19]可知,系统正常工作情况下,总线负载率最大为26%,由此得到负载率与令牌发送周期的关系,如图8 所示,其中负载率最大值对应200 台控制器均发生故障情况,负载率最小值对应无通信故障情况。
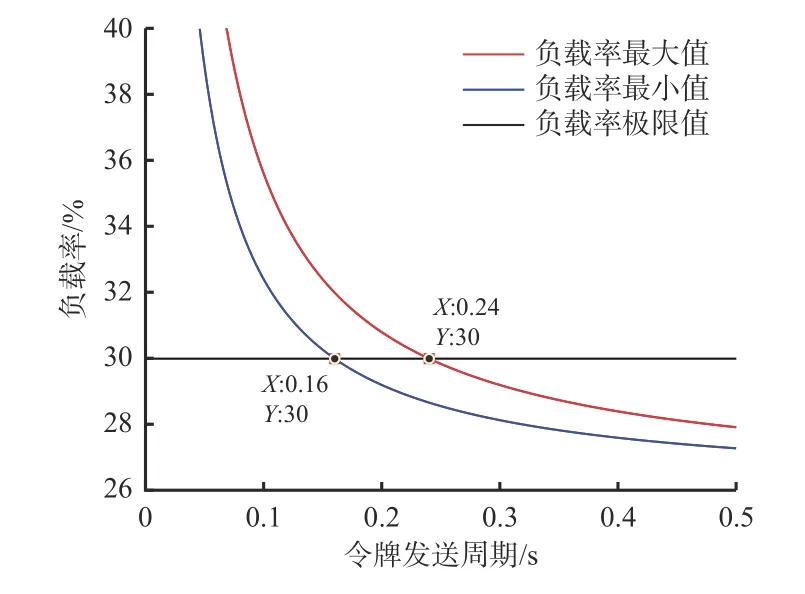
图8 负载率变化曲线Fig. 8 Curve of load rate variation
当令牌发送周期为0.24 s 时,总线负载率最大值为30%。随着令牌发送周期增大,总线负载率降低。实验证明,令牌发送周期为2 s 时,系统总线通信的冗余性良好,负载率较低,满足实际要求。
3 试验验证
为验证液压支架电液控制系统CAN 总线通信故障检测与诊断方法的有效性,设计了试验方案:以2 台端头控制器配合6 台支架控制器组成环网,通过上位机不定时下发命令,模拟井下实际操作时总线真实的负载情况。为保证系统正常运行,CAN 总线速率设置为500 kbit/s,在正常操作模式下,将某一台控制器从总线上人为掉线,以此模拟井下控制器故障情况,并通过CAN 总线分析仪和上位机软件监测故障记录,记录故障节点的报警时间,并通过软件记录当前总线负载率变化情况。试验平台如图9 所示。

图9 试验平台Fig. 9 Experimental platform
在正常工作模式下,系统能够正常运行,不会影响系统其他支架控制功能的实现。经过数据统计,结果如图10 所示。在18:05:21.076 时刻,将节点4 人为设置故障后,节点3 不会收到节点4 的回复信息,此时节点3 将发送3 次信息访问,未收到回复,判定节点4 发生故障。在18:05:21.318 时刻节点3 报警,并将令牌传递给节点5。

图10 试验结果Fig. 10 Experimental result
通过试验发现,在令牌轮询诊断模式下,当节点4 发生故障时,节点3 能在300 ms 内准确定位故障点,并及时向总线发送故障信息。总线负载率变化情况如图11 所示。

图11 总线负载率变化Fig. 11 Bus load rate variation
从图11 可以看出:第一阶段为系统上电阶段,此时总线处于空闲状态;第二阶段为系统稳定运行阶段,此时总线上包含控制器采集的传感器信息;第三阶段为系统加入令牌故障诊断功能阶段,此时总线负载率增加2%左右,并随着上位机指令下发出现轻微的浮动。当故障出现时,总线负载率会出现一定的增长,达到26%,整体低于30%,满足系统设计要求。
4 结论
1) 针对因井下电磁环境复杂、液压支架电液控制系统支架控制器易受外界干扰而导致通信故障的问题,设计了CAN 通信保护电路,可使系统在较大负载的情况下稳定运行,在复杂环境中具有较强的抗干扰性。
2) 针对工作人员难以及时发现故障位置的问题,提出了故障检测与诊断方法。该方法将令牌环网与CAN 通信协议相融合,不仅弥补了CAN 总线多主结构带来的安全隐患,而且不会对总线造成较大的负载压力。
3) 对提出的故障检测与诊断方法进行试验验证,结果表明该方法实现了对故障的快速定位及报警,故障排除率达到100%,系统冗余性较高,不会对系统正常运行产生影响。
