空间相机滤光片组件设计与动力学分析
2024-01-09时英钟门树东李朝辉
时英钟,门树东,李朝辉,黄 斌
(中国科学院长春光学精密机械与物理研究所,长春 130033)
0 引言
在空间探测与成像的项目中,滤光片是空间相机中重要组成部分之一[1-2],其作用是针对空间中不同波段的光进行过滤[3],使所需波段的光透过并进入探测器参与成像,其可靠性直接影响空间相机的成像性能和探测器的使用寿命[4-5]。在某一探月工程空间相机的结构中安装滤光片组件,通过将滤光片与滤光片支架进行胶结[6],滤光片支架的法兰面与镜筒使用螺钉连接完成安装和固定。然而,空间相机在运载途中及跟随火箭发射的过程中会面临量级不同的力学条件,振动类型多样化,面对严酷的载荷条件,保证滤光片能够适应严苛的载荷条件是重要的设计环节[7-8]。首先,应保证空间相机滤光片组件整体拥有较高的基频,在低频段不易因共振造成严重的破坏[9]。其次,进行20~2 000 Hz内的随机振动,在易损部分产生的放大倍数不超过8 倍,且响应应力不超过材料破坏的极限。
空间相机整机模型如图1 所示,其内部结构连接紧凑,各组件均有尺寸限制。滤光片分为8 片单独的扇形结构,拼接后的形状为带中心环的圆形,其大径与镜筒口径接近,但厚度仅为2 mm,其刚度、强度均薄弱。当外部载荷通过镜筒传递到滤光片支架后再传递到滤光片时,滤光片可能发生较大变形,所受应力可能会超过材料的许用应力,使得滤光片失效[10]。本文设计了滤光片的支架以及减振辅助件,两者共同作用以实现对外部载荷的衰减[11-12],并进行了有限元动力学分析,验证该设计的合理性[13-14],对滤光组件设计方案进行指导。
1 结构设计理论分析
空间相机在运输阶段、发射阶段、入轨阶段将面临不同的力学环境,当外界能量输入其中,会引起其结构件受迫振动[15]。因此在空间载荷结构设计中,需要考虑其动力学的特性。将滤光片组件与整机安装后,简化为多自由度有阻尼系统,其方程为:
式中:M、C、K、F分别为载荷结构的n×n阶质量矩阵、阻尼矩阵、刚度矩阵与输入激励矩阵;x(t)、(t)、(t)分别为节点的位移、速度、加速度。
首先计算整体结构自由状态下的固有频率,令阻尼矩阵C与输入激励矩阵F均为0,假定不存在外部载荷的影响,可得模态分析方程为:
当外界激励为谐振时:
则系统自由振动方程变为:
式中:X为位移向量的齐次线性方程组,在自由振动时,其不为0,因此可令其行列式为:
可求解n个特征值:,,…,,其平方根ω1,ω2,…,ωn为1,2,…,n阶固有频率。
固有频率与自身的结构有关,固有频率高易避开环境激励的频率范围,获得更高的抗力学性能[16],可避免在低频激励时产生破坏性的共振,导致整机内部的元件失效。因此,在设计中应当一定程度提高其整体的基频。
随机振动输入激励为非确定型,虽然无法用确定的数学表达式描述,但可用统计学来进行近似表示[17-18],常用功率谱密度(PSD)描述。将随机振动视为平稳的随机过程,根据随机振动理论有:
式中:SX(ω)、SY(ω)分别为输入激励和输出激励的密度谱;H(ω)为响应谱函数,H(ω)与H*(ω)为共轭复数。
当存在n个输入激励时,式(6)改为:
可求其均方根值:
其加速度均方根值表示为:
根据振动类型,振动谱型分为3 种[19-20]:上升谱、平直谱、下降谱,通常谱型为若干数量的3 种谱组合成的完整功率谱密度曲线,并且可分段进行计算。上升谱与下降谱可在式(8)的基础上改写为:
根据上式,谱密度SY(ω)为常数,即表明平直谱,其数学表达式为:
当一次振动激励统计其总均方根时,计算表达式如下:
在动力学分析与结构设计论证中,常用加速度均方根以表示振动的量级大小,表面结构件所承受的能量水平,对结构设计的环境适应性具有重要指导意义。
2 滤光片组件结构设计
滤光片组件安装在空间相机镜筒内,最外部由镜头盖与滤光轮控制是否捕捉光路。其中,滤光片支架与镜筒使用螺钉进行连接。虽然刚性连接有利于提高整机静、动态刚度,但外部载荷在达到共振峰时,对载荷的衰减程度有限,滤光片将承受超过其材料强度阈值的载荷进而发生结构性破坏。因此,需要设计滤光片安装的支架与减振结构。滤光片组件如图2所示。

图2 滤光片组件
滤光片组件由多个零件组成,包括滤光片支架、滤光片、滤光片压板、6 个均布安装接口处的减振垫片。其材料组成如表1所示。
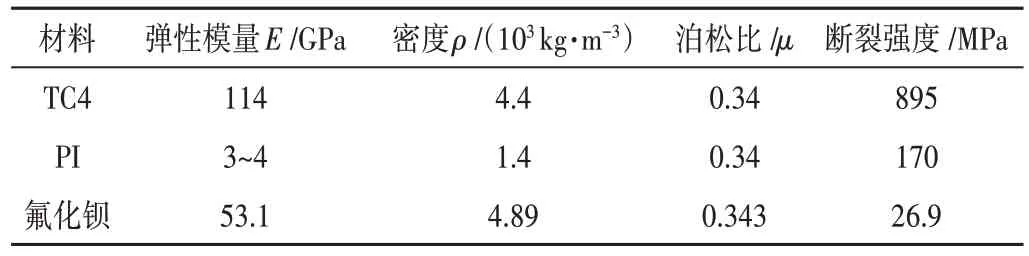
表1 滤光片组件所用材料
滤光片支架与压板使用钛合金材料,可实现高刚度及高强度。其中,滤光片支架为圆盘去除8 个扇形槽,即放置滤光片的位置,使得光线透过滤光片进入内部参与成像,并将滤光片组件与镜筒连接。单个滤光片压板为扇形,每个扇形板片另有2 个扇形槽,避免遮挡通过滤光片的光路;板片设有交叉式柔性槽,以释放光轴方向上的自由度,对滤光片起缓冲保护的作用。滤光片压板如图3所示。
滤光片为8 个扇形片,厚度为2 mm,为了满足光学设计指标的要求,材料选择氟化钡。与滤光片支架粘结并安装到滤光片支架后,再使用4片滤光片压板进行定位。
3 滤光片组件有限元分析
3.1 有限元模型的建立
在连接滤光片组件与镜筒后建立三维模型,进行有限元分析,使用ANSYS Workbench 分析求解[21]。由于空间相机整体结构复杂,直接进行有限元分析会大幅度增加计算量,降低分析效率。本文将镜筒、主镜、次镜、探测器、主支撑等组件进行简化,建立等效模型,去除圆角、孔、细槽等细节,使其与实际的结构维持相同的质量、质心、结构刚度,与真实结构接近。这样既保证了仿真的误差在合理的范围内,又减少了无关的计算量。
细化滤光片组件、滤光片模拟件的有限元模型,进行模态分析、响应谱分析。整机有限元模型如图4所示。
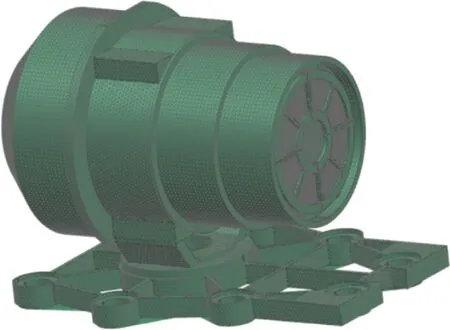
图4 整机有限元模型
将装配体采用分区域的方式划分网格,基板、中筒、后端镜筒等结构体体积较大,且不对滤光片组件产生影响,将其区域的网格大小设定为10 mm,滤光片组件部分根据尺寸的大小进行细化,整机的单元总数约为18万。滤光片组件与镜头安装面及内部连接面使用RBE单元模拟螺钉连接。
3.2 模态分析
在进行随机振动响应分析前,须先对整机进行模态分析,了解其振动特性。本文对整机进行模态分析,以基板底部的8个安装孔设为固定约束,统计前8阶模态,各阶数对应的频率如表2所示。1阶模态的振型如图5所示。
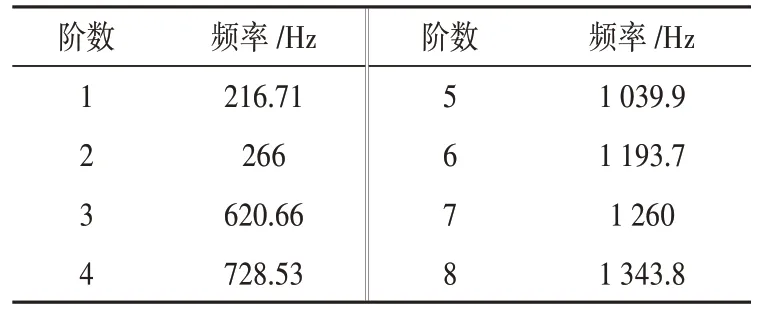
表2 模态分析结果

图5 整机模态分析云图
根据分析结果,1 阶模态振型表现为绕光轴摆动的趋势。固有频率为216.71 Hz,高于100 Hz以上的设计要求,在火箭发射过程中,不易受到低频大量级能量输入的影响而产生较大的量级响应,表明结构动态刚度较高。
3.3 随机振动分析
空间相机集成后将运输至发射中心,随后使用运载火箭助推升空,在此过程中将会面临种类、量级复杂多样化的振动环境。由于随机振动不属于确定的激励载荷,用功率谱密度曲线表示随机振动载荷并覆盖在3σ区间内的正态分布。使用表3 所示的频率与功率谱密度分布来模拟运输与发射时的振动环境。
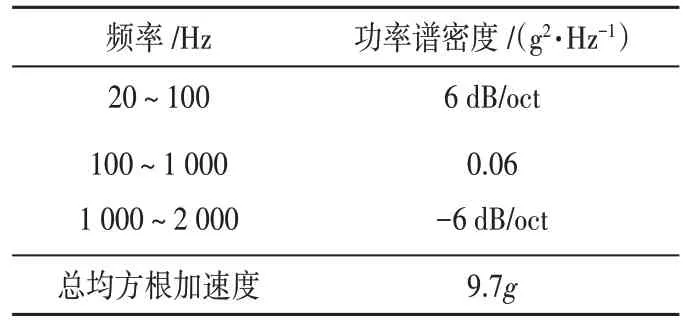
表3 振动输入条件
输入功率谱密度曲线如图6 所示。谱型为一段上升谱,一段平直谱,一段下降谱的组合,覆盖范围为从20~2 000 Hz。对整机加载X、Y、Z共3个方向的功率谱密度进行随机振动分析,统计3σ区间内的滤光片响应节点的加速度和响应应力,其可覆盖的概率为99.73%。3个方向上的随机振动结果如表4所示。
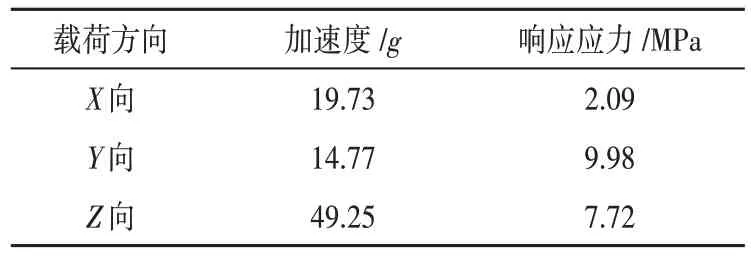
表4 随机振动响应结果
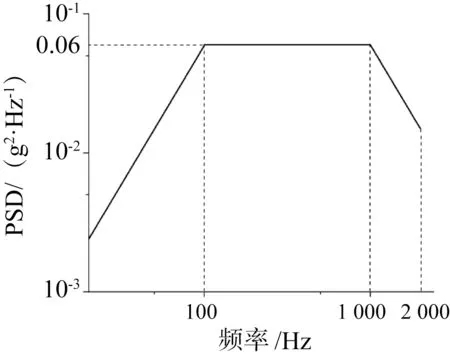
图6 随机振动输入曲线
在加载随机振动后滤光片位置在3 个方向的应力云图如图7 所示,最大的应力在滤光片与支撑结构件接触点处产生。在Y方向加载载荷时,产生了最大的响应应力,达到了9.98 MPa。
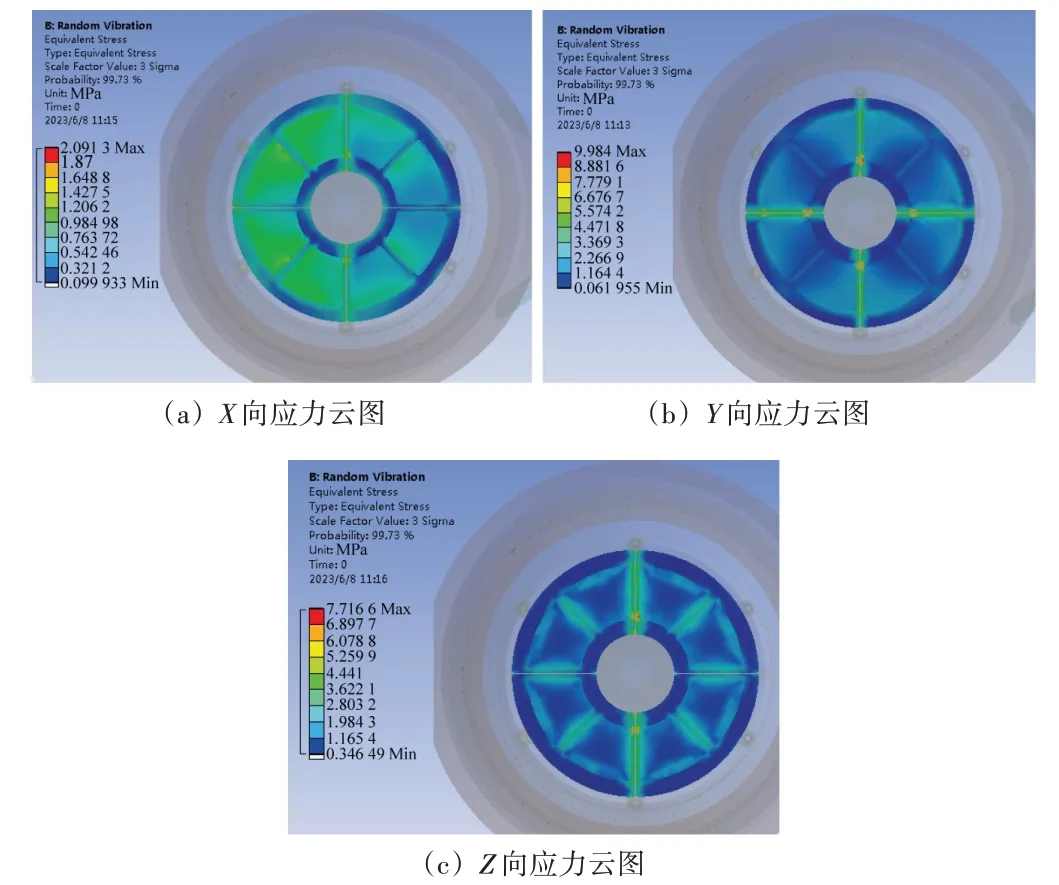
图7 滤光片应力云图
当载荷方向与光轴方向重合时,即Z向,滤光片处的响应加速度为49.25g,放大倍数为5.1 倍,当载荷方向垂直于光轴方向时,即X向与Y向施加载荷,响应放大倍数分别为2.03 倍和1.52 倍,各方向均符合设计要求范围内。滤光片位置3个方向上的PSD响应曲线如图8所示。
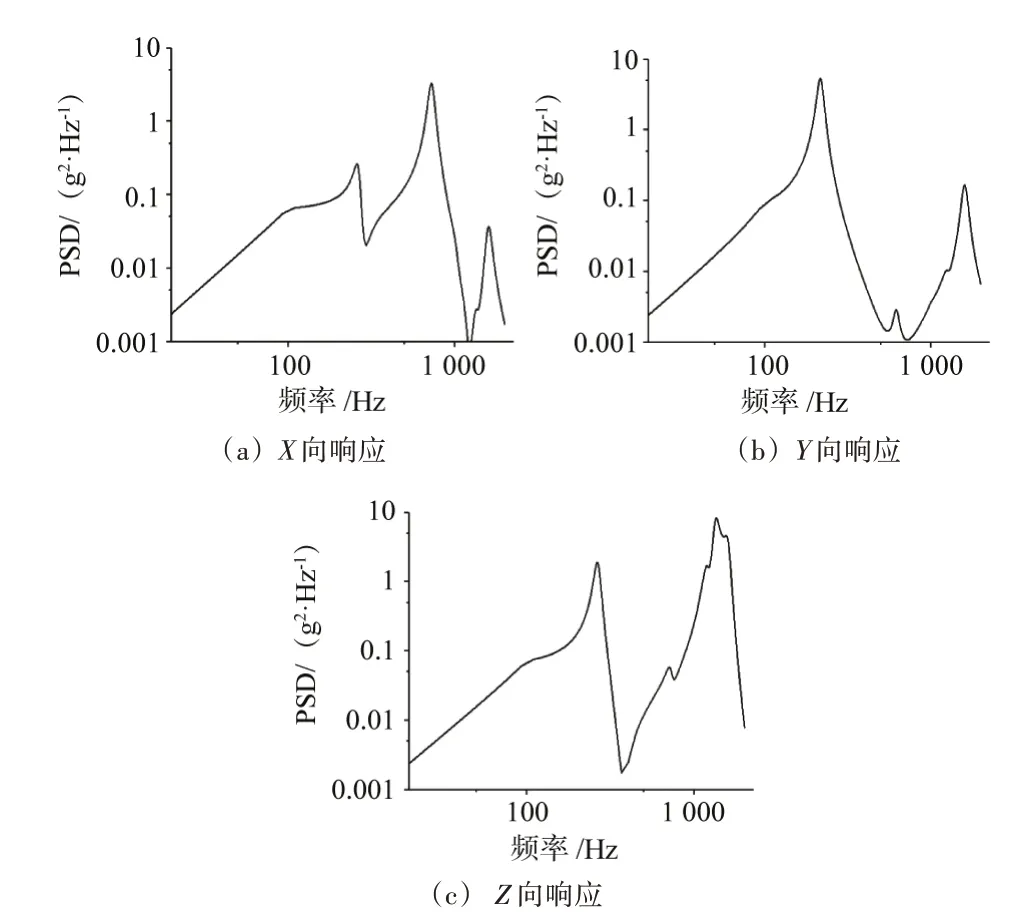
图8 加速度响应曲线
经过对模拟实际工况的有限元随机振动分析,探测点所处的位置,在进行随机振动后,最薄弱的结构件滤光片位置产生的响应应力没有超过材料的许用应力,故在此量级的载荷下结构件处于安全范围,不会对光路产生影响。
4 结束语
本文建立了滤光片组件的模型,并使用ANSYS Workbench 针对空间相机中滤光片组件进行有限元动力学分析,用功率谱密度来模拟多种振动条件,验证滤光片组件的设计结构是否满足力学条件。经有限元分析,组件的基频达到216.71 Hz,满足大于100 Hz 的设计要求;滤光片组件中最薄弱的结构件,在加载随机振动后,在3 个方向上的响应均没有超出许用范围,X向、Y向、Z向的响应放大倍数分别为5.1、2.03、1.52,最大响应应力为9.98 MPa,材料的响应应力低于造成材料失效的应力,能够保证在动力学环境下正常工作,为后续的试验方案验证及其他材料滤光片设计提供参考。
