考虑信标运动的水下联合定位算法
2024-01-08秦显平明锋许扬胤
秦显平, 明锋, 许扬胤
(1.地理信息工程国家重点实验室, 陕西 西安 710054; 2.西安测绘研究所 时空基准与导航研究室, 陕西 西安 710054)
利用海底信标进行导航定位,首先需要确定海底导航信标的位置,海底导航信标位置可以采用全球导航卫星系统(global navigation satellite system,GNSS)/声学定位获得[1-3]。GNSS/声学定位中,声学观测量为船底换能器到海底导航信标之间的往返时间,为了将时间观测量转换为距离观测量,需要引入声速值[4-5]。
声速可以通过声速测量获得,但是声速测量中不可避免地包含仪器校准等测量误差[6]。此外,相同的CTD声速测量值,采用不同的经验公式,计算得到的声速值也不相同[1]。如在2 000 m水深海域,采用Chen Millero和Del Glosso公式计算的声速差异约为0.55 m/s[7]。受海洋环境影响,声速结构具有复杂多变的时空特性[8-9],在海底声学定位中,无法通过声速测量准确描述声速变化[10-11],声速误差成为制约海底信标高精度定位的主要因素[12-13]。
船底换能器与海底导航信标之间的时间观测量,不仅包含有距离信息,而且包含有沿着声迹线的声速信息[14],利用这一特点,可以采用系统误差补偿算法,将声速模型作为未知参数进行估计[15-17]。声速具有明显的时间变化特性[1],通过估计声速时间变化可以获得高精度的海底定位结果[15]。
增加海底导航信标之间的基线长度,可以增强导航几何结构,提高导航精度。随着导航信标之间距离的增加,为保证导航信标之间的测量声线路径位于海底之上,应增加导航信标的高度[18-19]。但是,增加海底导航信标高度,将对信标的稳定性和维护带来不利影响[20-22],此时采用锚系固定海底导航信标是个不错的选择[23-24]。与GNSS/声学观测相比,海底导航信标之间的声速变化较小,距离观测精度更高[24]。因此,采用海底导航信标之间的声学测距值,可以获得导航信标之间的高精度相对位置[25]。
利用GNSS/声学测量,可以获得全球统一坐标框架下的绝对位置[26],但其定位精度受声速模型误差影响较大;利用海底信标之间的声学测量,可以获得高精度的相对位置[22,25],但其结果无法满足水下导航定位的绝对位置需求。本文在GNSS/声学定位和海底声学测距定位的基础上,通过引入导航信标周期性运动模型,构建导航信标运动的联合定位方程,并采用实测数据进行计算分析。
1 联合定位方程
假设海底导航信标位置没有发生变化,基于GNSS/声学测量数据的简单弹性定位方程可以表示为[5]:
(1)
通过求解上述简单弹性定位方程,不仅可以获得海底信标近似位置,而且可以获得平均声速。但是声速变化具有明显的时间和空间变化特性,仅采用一个平均声速参数并不能准确描述声速变化。文献[12]提出了一种考虑时空变化的声速模型,忽略声速空间变化后的定位方程可以表示为:
(2)

海底导航信标基于海底声学测量数据的定位方程可以表示为[22]:
(3)

(4)

顾及海底导航信标运动,联立GNSS/声学测距及海底声学测距定位方程,可以建立误差方程:
V=AX+BY+CZ-L
(5)
2 计算数据与方案
2.1 试验观测数据
2019年7月在水深约3 000 m海域对5个海底导航信标进行了GNSS/声学定位观测,并开展了海底声学测距试验,其中5号导航信标采用方舱固定,其他4个导航信标采用锚系固定,通过缆绳与海底配重块连接固定在海底,缆绳长约50 m。图1给出了海底声学观测与GNSS声学观测之间的关系。
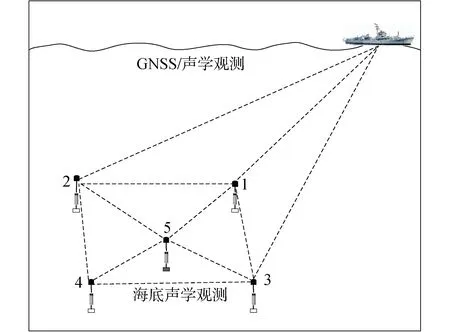
图1 海底声学观测与GNSS/声学观测关系Fig.1 The relationship of seabed acoustic observation and GNSS/acoustic observation
GNSS/声学定位与联合定位采用网格构型观测数据,其观测为2019年7月14日21时24分至2019年7月15日23时35分,共约26 h。图2给出了海底导航信标与船底换能器的平面坐标关系。
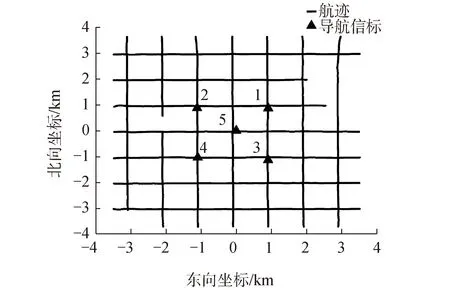
图2 海底导航信标与船底换能器平面位置关系Fig.2 The horizontal coordinates relationship of submarine navigation beacons and the transducer under the ship
海底导航信标之间的声学测距试验开展了3次,每次试验均对5个信标组成的10条基线进行了观测,3次海底声学测距试验观测信息见表1。从表1可以看出,海底导航信标之间的声学测距总时长约7.5 h,共有5 738观测数据。
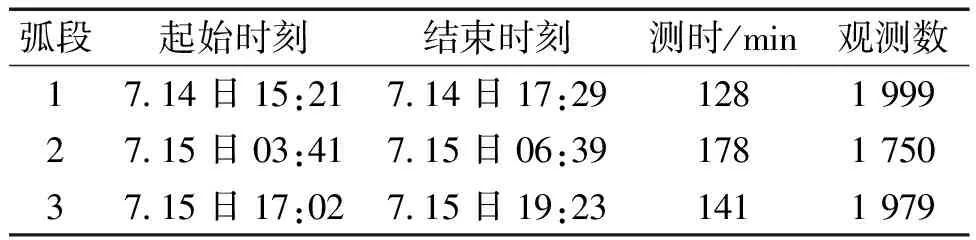
表1 海底声学测距信息Table 1 Information of the seabed acoustic ranging
2.2 计算步骤及方案
海底导航信标的联合定位计算步骤为:1)利用GNSS/声学观测数据,采用简单弹性定位方程(1)计算5个海底导航信标的概略坐标(简称简单弹性定位);2)利用GNSS/声学观测数据和海底声学测量数据,采用联合定位方程(5)计算导航信标的运动轨迹及声速模型。
导航信标运动在垂直方向的变化幅度较小[22],计算时不估计导航信标天顶方向坐标。为比较GNSS/声学定位结果与联合定位结果,采用下面2种方案进行计算:
方案1:利用GNSS/声学观测数据,固定5号导航信标位置,对其他4个导航信标运动轨迹及区域声速模型参数进行估计(简称GNSS/声学定位)。
方案2:联合GNSS/声学观测数据与海底声学测量数据,固定5号导航信标位置,对其他4个导航信标运动轨迹及区域声速模型参数进行估计(简称联合定位)。
3 计算结果及分析
3.1 声速估计结果及分析
采用上述方案计算海底导航信标位置,不仅可以得到导航信标运动轨迹,而且可以获得每个观测时刻的声速估值,为验证声速估值的正确性,本文采用声速测量值进行了比较。试验期间开展了4次声速测量,每次声速测量的观测时长及最大水深各不相同,声速测量信息见表2。
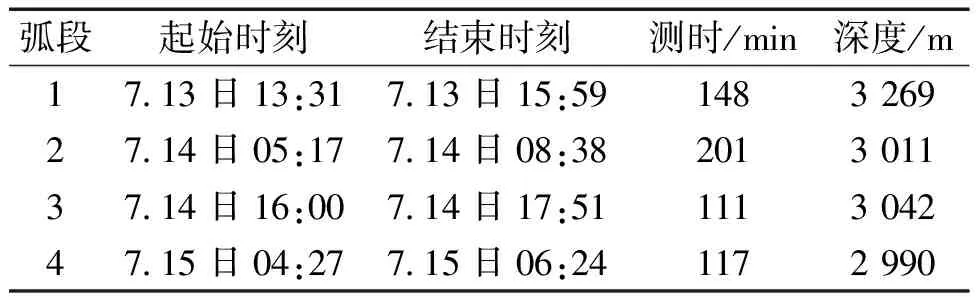
表2 4次声速测量信息
从表2可以看出,4次声速测量的耗时分别为148、201、111、117 min,可见深海声速测量需要耗费大量时间;从4次测量的最大水深可以看出,仅有一次声速观测水深超过了3 100 m。因此,从时间和空间看,声速测量无法满足海底应答器高精度定位需求,在海底导航信标定位中需要对声速进行估计。
采用SPSS 19.0统计学软件对数据进行处理,计量资料以“±s”表示,计数资料采用x2检验,以P<0.05为差异有统计学意义。
图3给出了4次声速测量的声速剖面图。由图3可以看出,声速测量可以给出不同水深测量处的声速值,而声速估计值为船底换能器到海底导航信标的平均声速,为比较声速测量值与声速估计值,采用下式计算声速测量数据的平均声速[27-29]:
(6)
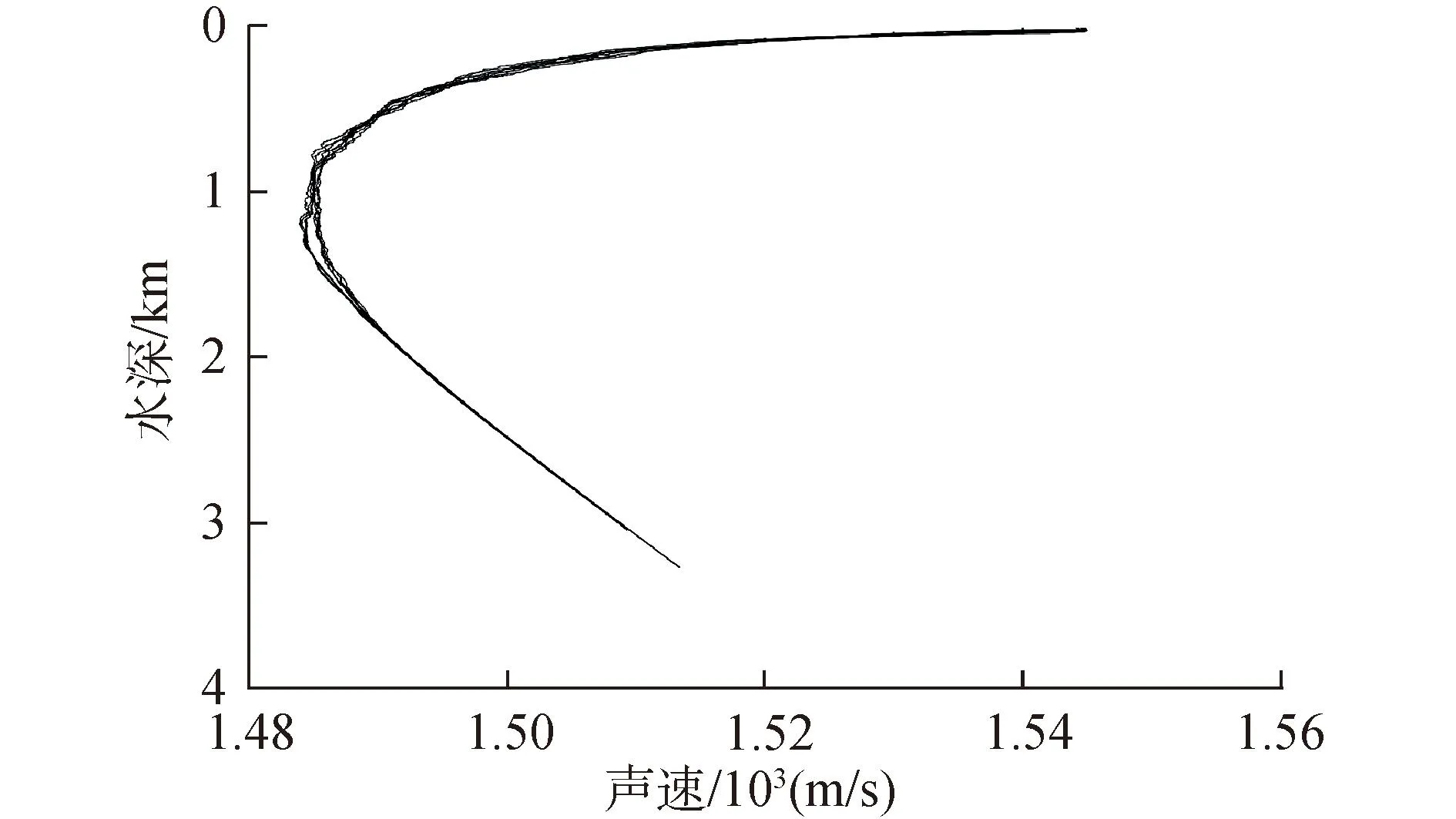
图3 试验区的4次声速剖面Fig.3 Four sound velocity profiles in the experiment region

5号导航信标位于约3 070 m水深处[30-32],按照上式,计算水深3 070 m的平均声速,对于测深小于3 070 m的声速测量,首先采用线性拟合,计算出最大深度至3 070 m的声速,然后采用式(6)计算平均声速。
图4给出了2种不同方案计算的声速模型和声速测量计算的平均声速。横轴表示7月13日0:00时起算的小时数,时间系统为GPS时间。
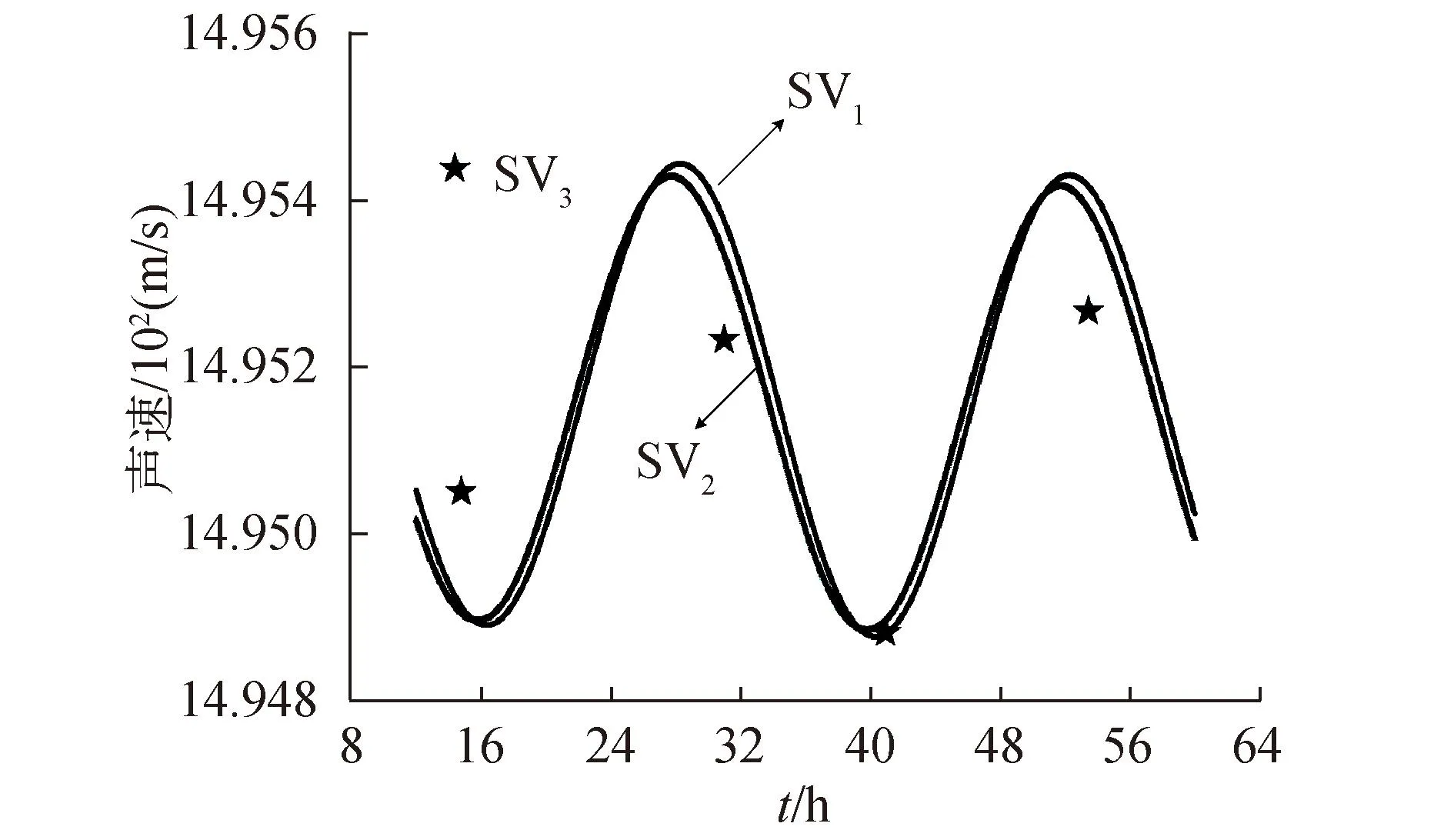
图4 水下定位声速模型及声速观测平均声速Fig.4 The model of sound velocity from underwater position and the average sound velocity from measurement
由图4可以看出:1)2种方案计算的声速变化规律相同,声速均在北京12时左右最大,24时左右最小(北京时为GPS时加上8 h,图中GPS时16时即为北京时24时);2)2种方案计算的声速模型与声速测量计算的平均声速值具有较好一致性。
表3给出了声速测量中间时刻的声速估计值,其中,SV1为GNSS/声学定位估计的声速值,SV2为联合定位估计的声速值,SV3为声速测量计算的平均声速值。
3.2 残差结果及分析
利用海底导航信标坐标值可以计算信标之间的基线距离,基线残差(即信标之间的声学测距值与坐标计算的基线距离之差)可以用来检核导航信标坐标估计结果。表4给出了简单弹性定位结果的基线残差统计值,其中基线i-j表示信标i与信标j组成的基线。图5给出了简单弹性定位结果的基线残差图。
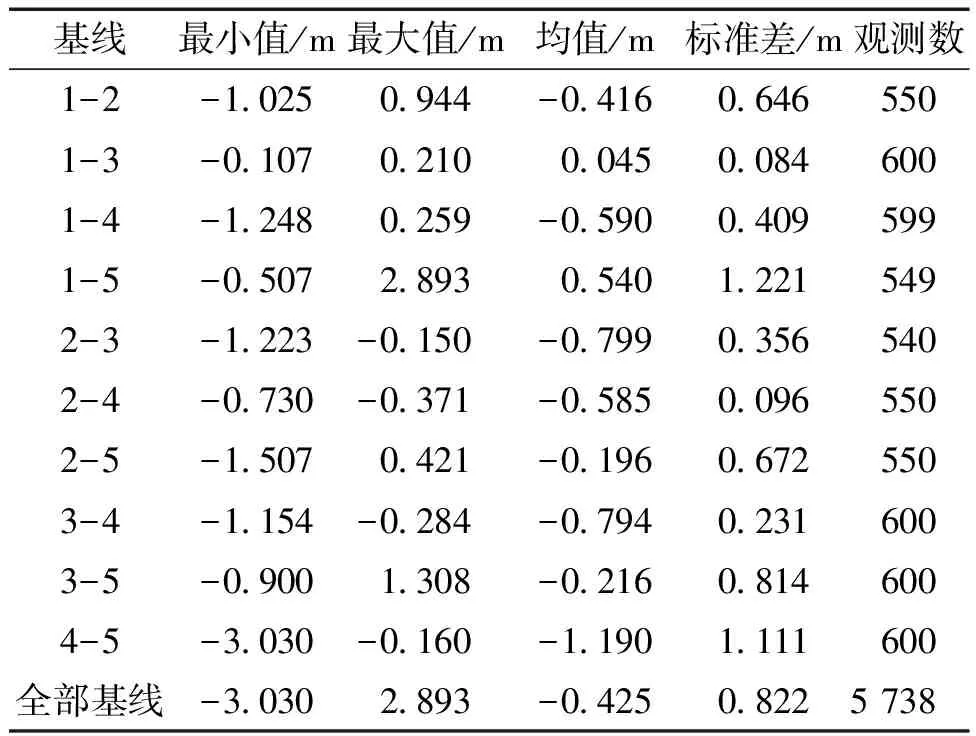
表4 简单弹性定位基线残差值
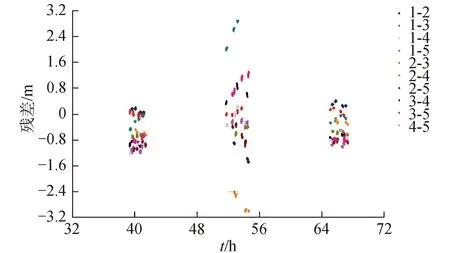
图5 简单弹性定位基线残差Fig.5 The residuals of the base-line from simple resilient positioning
由表4及图5可以看出:1)第2次海底声学测距基线残差最大,这可能是由于该时间段内,4个锚系导航信标的运动幅度较大;2)基线残差最小值为-3.030 m,该基线为4号信标与5号固定信标组成的基线,表明4号信标的运动幅度可达3 m;3)基线残差最大值为2.893 m,该基线为1号信标与5号固定信标组成的基线,表明1号信标的运动幅度近3 m;4)锚系导航信标与5号固定信标组成的基线残差较大,而4个锚系导航信标之间的基线残差较小,这可能是由于4个锚系导航信标之间的运动具有一致性。
表5给出了GNSS/声学定位结果的基线残差统计值。图6给出了GNSS/声学定位结果的基线残差图。
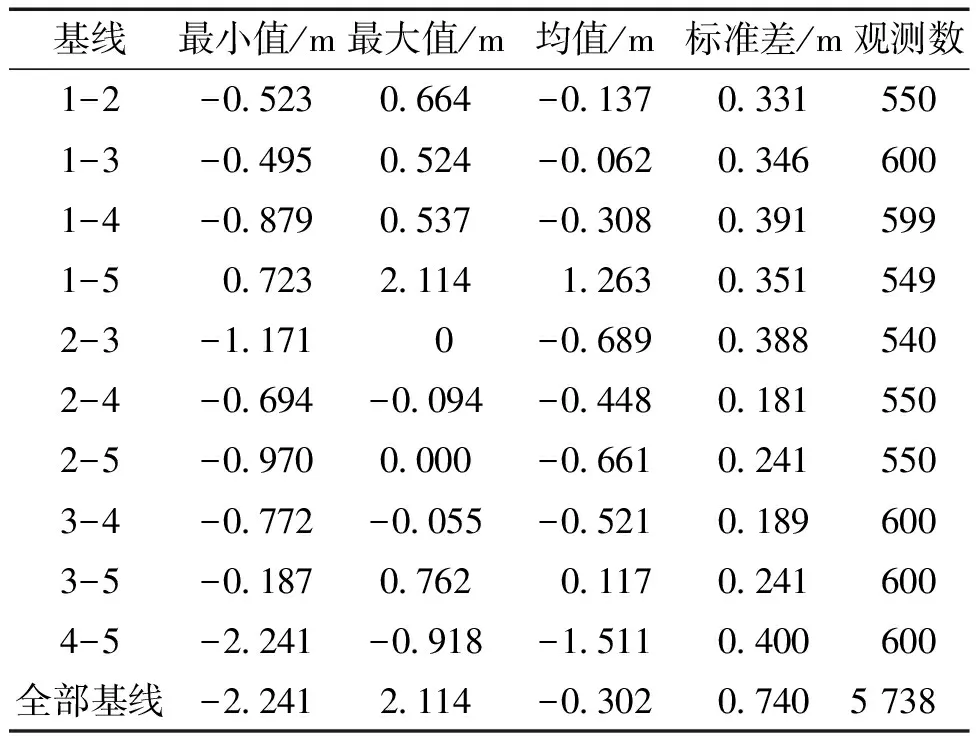
表5 GNSS/声学定位基线残差值
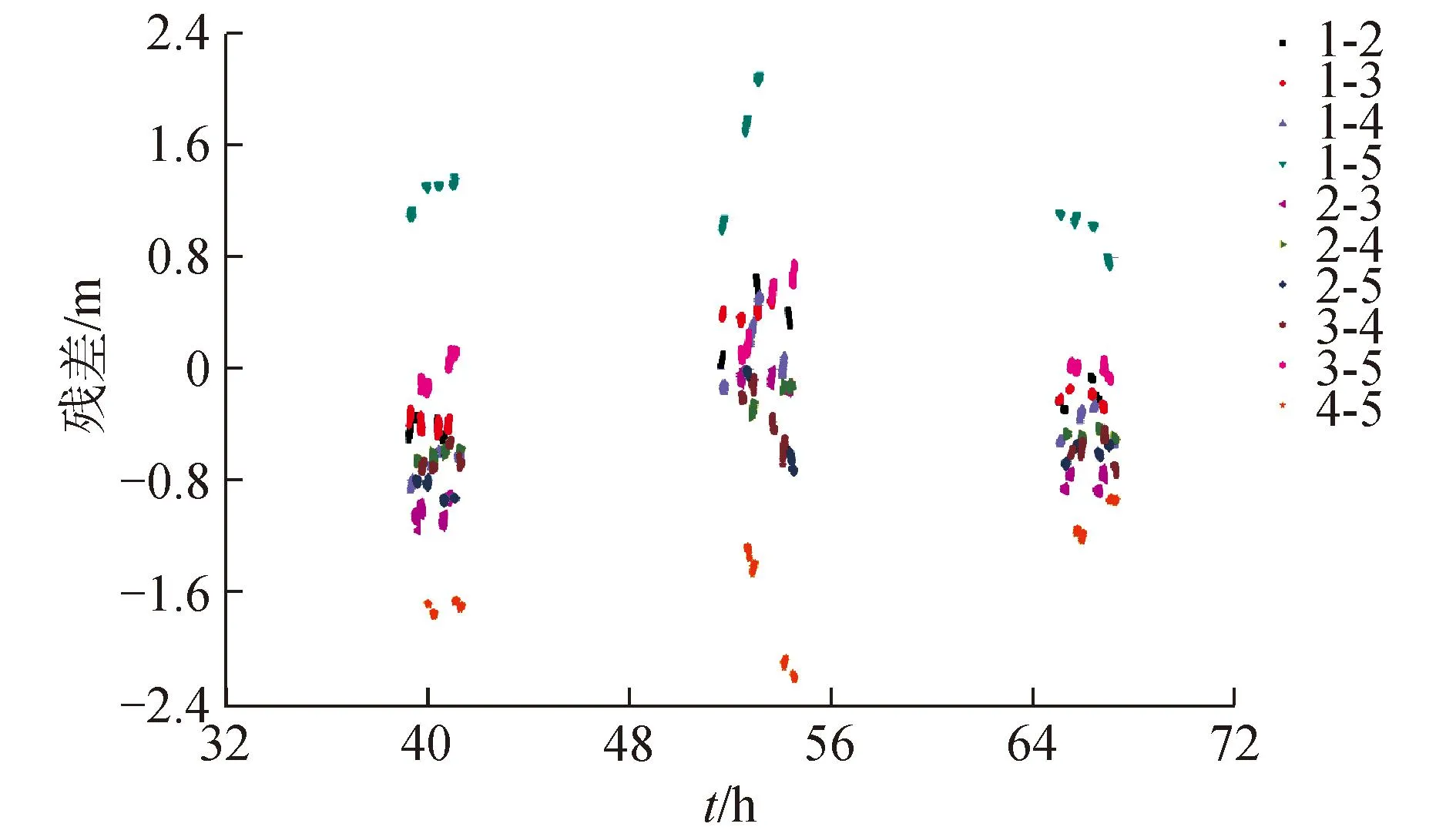
图6 GNSS/声学定位基线残差Fig.6 The residuals of the base-line from GNSS/acoustic positioning
由表5及图6可以看出:1)基线残差最小值为-2.241 m,该基线为4号信标与5号固定信标组成的基线;2)基线残差最大值为2.114 m,该基线为1号信标与5号固定信标组成的基线;3)与简单弹性定位结果相比较,考虑信标运动的GNSS/声学定位基线残差得到了明显的改善。
表6给出了GNSS/声学定位结果的基线残差统计值。图7给出了GNSS/声学定位结果的基线残差图。
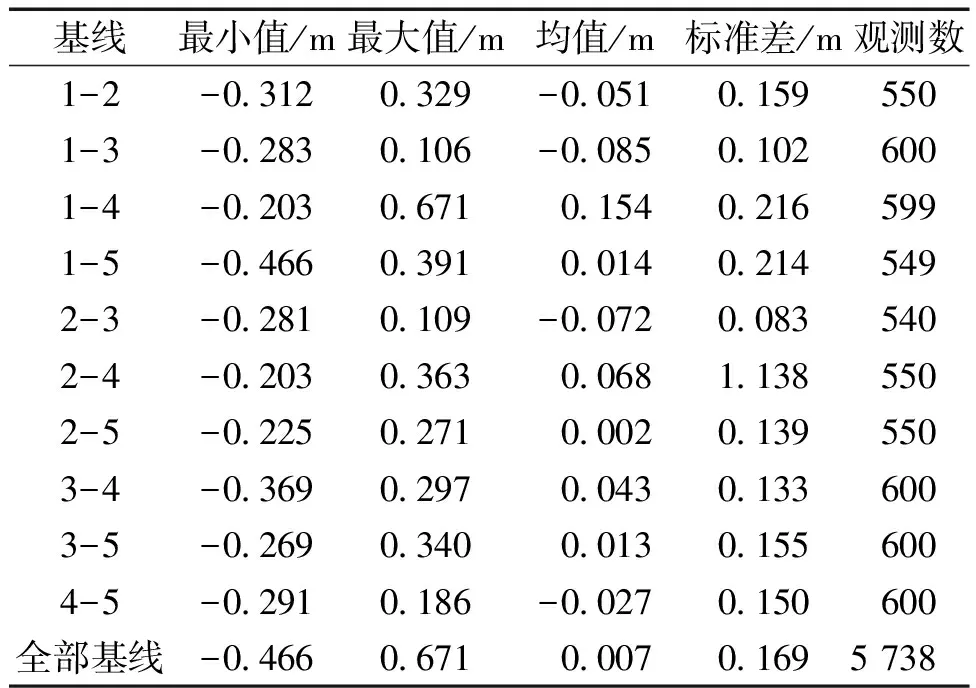
表6 联合定位基线残差值
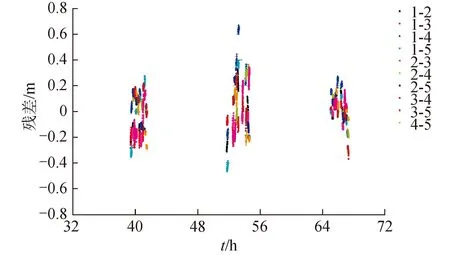
图7 联合定位基线残差Fig.7 The residuals of the base-line from combined positioning
由表6及图7可以看出:1)基线残差最小值为-0.466 m,该基线为1号信标与5号信标组成的基线;2)基线残差最大值为0.671 m,该基线为1号信标与4号信标组成的基线;3)5个导航信标之间的基线残差没有明显差异,表明周期性运动模型可以较好地描述海底导航信标运动轨迹。
由表4~6可以看出,简单弹性定位、GNSS/声学定位及联合定位的基线残差统计值分别为-0.425±0.822 m、-0.302±0.740 m、0.007±0.169 m,表明考虑信标运动的联合定位可以获得更高精度的海底导航信标位置。
3.3 运动轨迹结果及分析
采用上述方案计算海底导航信标位置,可以得到海底导航信标概略坐标及2组不同的运动轨迹,图8给出了4个海底导航信标的运动轨迹图。由图8可以看出:1)简单弹性定位计算的位置在GNSS/声学定位计算的运动轨迹之内,但简单弹性定位结果并非是运动轨迹的平均值;这可能是由于两者采用了相同的观测数据,但声速处理策略不同;2)GNSS/声学定位和联合定位计算的运动轨迹,均呈现出东向方向运动幅度大于南北方向运动幅度的现象。
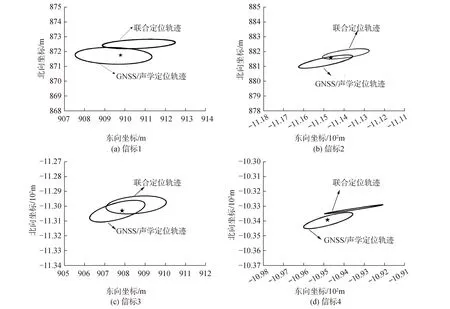
图8 海底导航信标的运动轨迹Fig.8 The motion of the submarine navigation beacons
4 结论
1)试验海域的声速存在明显时间变化,利用海底导航信标组成的观测网,获得的声速模型与声速测量值之间的差异小于0.15 m/s,其中GNSS/声学定位估计的声速模型与声速测量值的差异为-0.038±0.136 m/s,联合定位估计的声速模型与声速测量值的差异为-0.025±0.120 m/s,GNSS/声学定位与水下联合定位的声速模型具有较强一致性。
2)GNSS/声学定位及联合定位的基线残差统计值分别为-0.302±0.740 m、0.007±0.169 m,基线残差检核导航信标定位结果表明,水下联合定位由于融合了GNSS/声学测量与海底声学测量优势,其结果具有更高精度。
3)4个锚系信标的运动轨迹存在明显周期性,其水平运动幅度可达3 m,GNSS/声学定位和水下联合定位计算的运动轨迹,均呈现出东向运动幅度大于南北运动幅度的现象。
