水下导航定位弹性架构及关键技术
2024-01-08曾安敏明锋吴富梅
曾安敏, 明锋, 吴富梅
(1.地理信息工程国家重点实验室, 陕西 西安 710054; 2.西安测绘研究所, 陕西 西安 710054)
海洋占地球表面积的71%,贮藏着丰厚的自然资源,是人类可持续发展的重要空间。“建设海洋强国”已成为国家发展的重要内容,维护海洋权益、发展海洋经济和研究海洋环境,离不开高精度海洋时空基准信息。高精度海洋时空基准信息是水下资源环境调查、水下环境信息保障不可或缺的重要基础信息,水下导航定位已成为海洋战略谋划、决策、规划和实施的前提[1-7]。虽然世界上建成了包括北斗卫星导航系统在内的多个卫星导航系统,以及包括罗兰系统在内的多个低频/甚低频无线电导航系统等时空基础设施,能够为空中、陆地、海面用户提供定位导航授时(positioning, navigation and timing,PNT)服务,但由于海水的吸收作用,这些无线电信号入水性差,无法直接为水下用户提供服务。
目前,水下导航定位严重依赖惯性导航技术,惯性导航技术的机理决定了其误差迅速累积,仅采用惯性导航技术的水下航行器不得不定期上浮或靠近水面,利用外部高精度定位技术对其导航定位位置进行标定,以削弱惯性导航误差累积的影响,但这种上浮势必增加了水下航行器的暴露风险,降低了水下航行器的隐蔽性[8]。为确保水下航行器导航定位服务的可用性和稳健性,多普勒计程仪、电罗经/磁罗经、压力传感器等辅助技术常被采用[9],建立安全可信时空基准的弹性服务[4,7,10-13]已成为世界强国竞相发展的目标。为提高PNT服务的可靠性、可用性和安全性,近年国际上提出了弹性PNT,从弹性概念、多传感器弹性集成、弹性PNT的特性、弹性架构等方面进行了较深入研究[14-22],这些基础理论研究为水下导航定位服务的体系化提供了重要理论支撑。为提高水下导航定位能力,增加战略对抗实力,美、俄等国大力开展水下导航定位技术研究,偏重于各导航定位技术的发展[17],如美国的深水导航定位系统项目、俄罗斯的新型水下导航定位系统项目等[23-24],同时重建低频/甚低频无线电导航系统,从功能性、安全性、覆盖性出发加强PNT能力特征建设。近年来,我国学者也开启了涵盖深空、深海的综合PNT体系研究[25-26],对水下PNT也进行了有益的尝试[27-28],包括水下用户需求特点、当前PNT体系的水下服务能力差距分析、未来发展关键技术、初步架构设想、信息架构等。
本文试图对水下导航定位的弹性架构进行较初步的系统阐述,系统分析水下导航定位所涉及的技术,从技术体系设计、信息源基础设施设计、用户终端弹性设计等方面构建了其弹性架构,分析了水下PNT建设所涉及的关键技术。
1 不同机理水下导航定位技术分析
能够为水下用户提供导航定位的主要技术有惯性导航技术[8]、航位推算导航技术[29]、水声定位导航技术[30]以及背景场匹配导航技术[31]等,其主要技术特点见表1。此外,还包含压力计、电罗经等辅助设备。同时考虑时间频率,则还应包含晶振、芯片原子钟等。这些水下导航技术有不同技术特点,也有其不同的应用范围,可互为补充、互相增强。当前蓬勃发展的量子技术,应用于惯导、物理场信息测量仪等,虽然用途广泛,并不是独立的传感器技术,本文不论述。

表1 不同水下定位导航技术特点Table 1 Underwater navigation and positioning technologies and their advantages and disadvantages
2 水下导航定位体系的弹性化架构
目前,水下导航定位服务能力相对于水下用户需求存在较大差距,世界各国都在积极发展惯性导航、声学导航、辅助导航等技术,逐步完善自身的水下导航定位技术体系[10]。同样,我国学者也开启了海底大地基准与水下PNT体系相关研究[2,5-6,8,27],有学者将水下PNT体系分为基本架构、水面/近水面架构、应急PNT架构和评估架构[27]。水下场景不同于陆地/海面、深空场景,水下导航定位作为国家综合PNT体系的重要组成部分,应遵循综合PNT架构[25]、弹性化PNT概念[16-17]一般要求,具备对外部干扰等异常的预防、异常响应、性能恢复等弹性能力。这种弹性能力的实现,冗余是基础,即应建立在冗余的基础上,包括技术冗余、传感器冗余、分析方法冗余、处理软件冗余、算法冗余等,传感器冗余既包括不同机理系统冗余、相同机理系统冗余和多个相似机理传感器冗余等[32](如图1所示)。
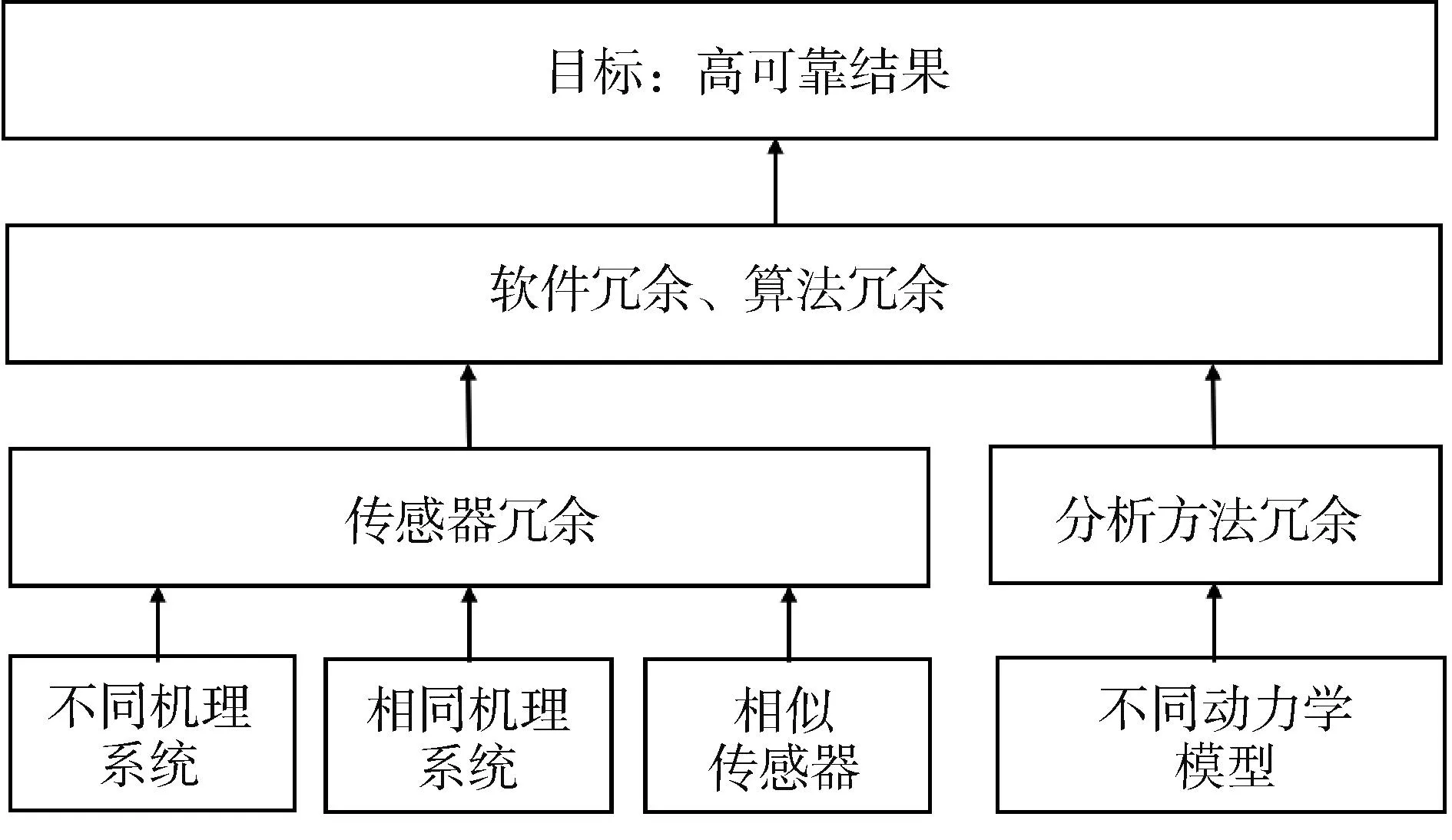
图1 弹性PNT体系的多源冗余架构Fig.1 Redundancy technology that support resilience PNT
2.1 弹性化架构的基本要求
构建水下导航定位的弹性化架构,仅有冗余是不够的,还应具有以下方面。
1)服务技术的多机理性。为满足水下PNT稳健可用性、稳健连续性和高可靠性,为水下用户提供PNT信息服务的技术应是不同技术、多机理的。之所以水下场景也要强调“不同原理”、“多机理”,是因为基于相同原理的信息一旦受干扰、遮蔽,再多的信息也无济于事,即一种技术的系统瘫痪不至于影响整个水下导航定位系统的可用性[16,25]。
2)信息源基础设施的互补性。为水下用户提供PNT服务的技术,有的需要提供信号的基础设施和用户接收传感器的同时支持,而有的则仅需在用户终端自主传感器。水下环境的信息源基础设施建设是用户PNT服务性能提升的基础与前提。由于建设成本等基础设施不可能在全球海域都建设,或者说基础设施在全球海域都有效。提供PNT服务的多种信息源基础设施应是互补的、冗余性的。海洋环境下的信息源基础设施建设成本巨大[1],一般应由国家统筹建设。
3)导航信息的冗余性。由于海水的吸收作用,无线电导航信号入水衰减严重,天文导航更不可用,能够为水下用户提供的导航定位观测信息主要有惯性导航信息、航行速度信息、航向信息、水声测距时延信息、物理场信息以及其他的辅助信息(如深度信息)等,这些信息互相补充,信息冗余。水下用户应充分利用这些信息,以确保导航定位服务的可靠性、连续性。
4)用户终端的弹性化集成。水下用户终端应能够利用一切可利用的PNT 信息,这种有效利用是以场景智能感知为前提的,依据外部场景自动选择工作的传感器。传感器硬件的场景智能接入、弹性优化集成、信息的弹性融合处理是用户终端弹性化集成的关键。如此用户终端可利用一切可利用的PNT信息生成连续、可用、可靠、稳健的PNT服务信息。
依据前述对水下导航定位体系的弹性化架构要求,从多机理技术体系、信息源基础设施和弹性化终端等方面对水下导航定位体系的弹性化架构进行设计。
2.2 水下导航定位体系的多机理融合
不同的导航定位测量信息由不同的导航技术装备提供。惯性导航信息由惯性导航系统提供;航行速度信息由多普勒计程仪提供;航向信息由航向传感器(如罗经)提供;水声测距信息由水声定位导航系统提供;物理场中的重力信息由实时重力测量仪提供,磁力信息由磁力仪器设备提供;深度信息由压力(水深)传感器提供。此外,水下用户终端应能够自主维持时间信息。惯性导航技术、航位推算导航技术、水声定位导航技术等这些技术也需要高精度时钟信息,小型(芯片式)原子钟技术也是水下PNT技术体系所必不可少的时间源。
此外,卫星导航、(甚)低频无线电等技术的信号虽然无法直接为水下用户服务,但它们能够为惯性导航的累积误差的标定提供支持,也能够为水声导航、物理场匹配辅助导航所必需的基础设施建设时提供导航位置支持。极端条件下,天文导航[33]也可作为保底手段提供使用。
如此,水下导航定位的多源技术体系应以惯性导航技术、原子钟技术为核心,以航位推算导航技术、水声定位导航技术、水深测量技术和物理背景场匹配辅助导航技术为补充,辅以卫星导航、(甚)低频无线电、天文导航等技术为标定支撑的技术体系(如图2所示)。
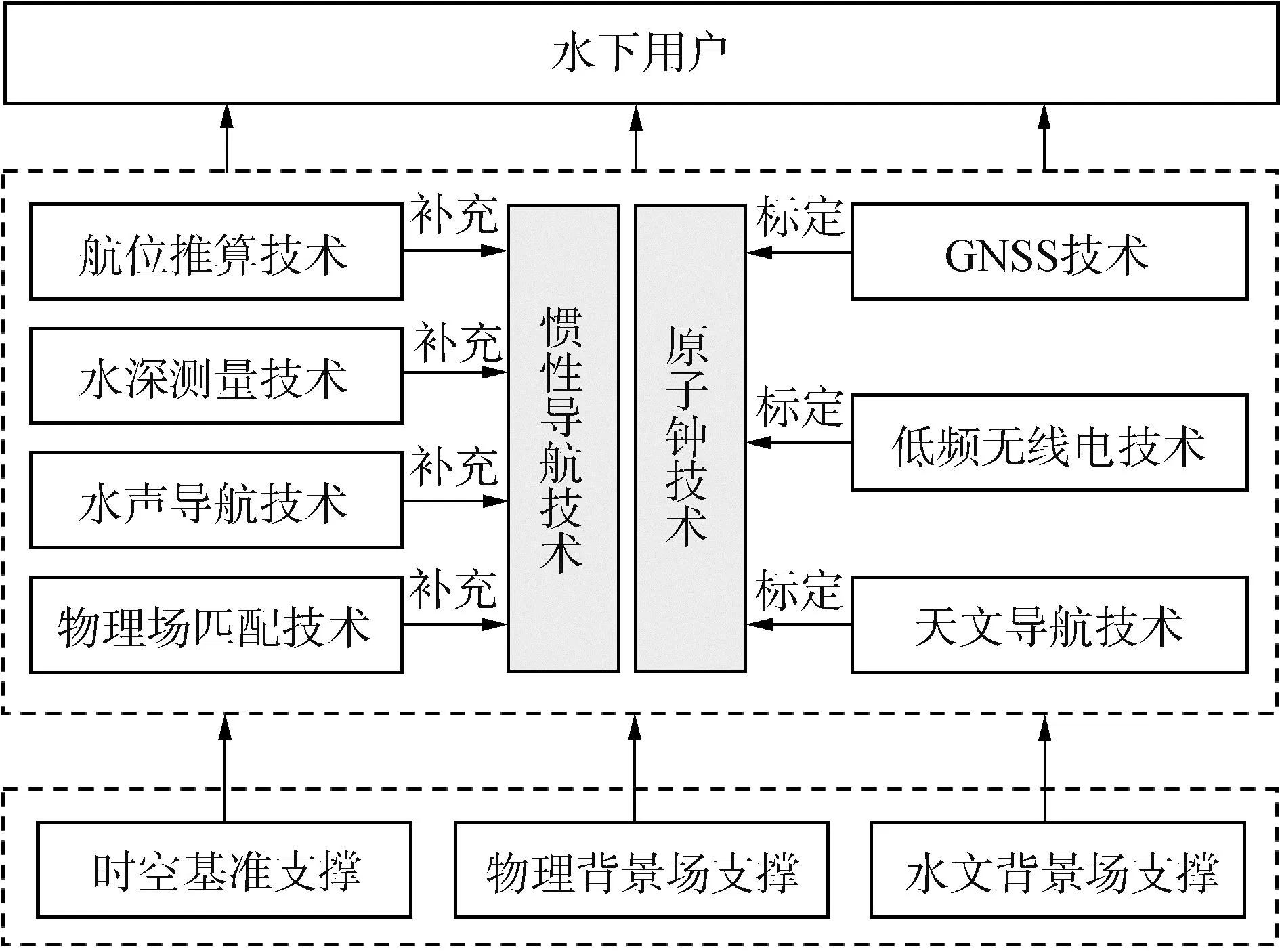
图2 水下导航定位的多机理技术体系Fig.2 Underwater navigation and positioning technology architecture with multi-mechanism
2.3 水下导航定位体系的信息源基础设施架构
水下导航定位服务应由基于不同机理的导航信息提供[16,25],这些导航信息来自不同的导航技术,有些技术需要信息源设施支撑,而有些技术则不需要。
惯性导航系统只需在用户终端安装设备即可能进行导航,工作时需要初始对准,包括静基座对准与海上动基座对准,即需要起算点坐标或者在线标定。同样,航位推算系统工作也需要起算点或者在线标定。这些起算点坐标由大地控制网(空间基准网)提供,这些提供起算坐标(或方位信息)的空间基准网即为其信息源基础设施。
对于水声导航技术,其信息源基础设施为信标服务网,包括海面浮标网、水中信标网、海底信标网等,建设在特定海域。这些信标服务网的服务节点常配置水声换能器、原子钟、压力计、声速仪等有效载荷。信标服务网为水下用户提供服务时,其位置应是已知的。由于海面浮标网随海流运动,其位置只能依靠卫星导航、无线电导航、天文导航等标校技术手段获得;水中信标网在水体中也是运动的,其实时位置目前只能依靠水声测量技术提供;而海底信标网固联在海底,其位置是不动的,可事先精确标定。高精度标定信标服务网各点的位置是建设水声服务网的一项重要关键技术[34-35]。
物理场匹配导航技术的基础设施是可匹配区的物理场匹配图数据库。这种物理场匹配图数据库必须事先建设,建设背景场数据库工作量巨大、技术复杂,常采用空、天、地、海一体化测量融合生成,并且事先注入匹配终端[36-39]。物理场匹配基准网的分辨率、精度与可适配性直接决定了导航匹配的精度。没有适配区的高分辨率、高精度的物理场匹配基准网数据库的支持,匹配导航将无法工作。
水深(压力)测量技术作为水下导航的辅助技术,可提供深度信息。水深(压力)仪量测得的深度是相对于当地平均海水面的水深,要想得到统一于国家法定基准下的大地高,平均海面高数据库成为水深(压力)测量技术的基础设施。平均海面高数据库的分辨率和精度决定了其结果的精度。
如此,为满足潜器、水下无人平台等国防安全需求,以及水下工程建设、资源勘探、水下考古等民用需求,水下导航定位体系的信息源基础设施应主要由“海面信标网+水中信标网+海底信标网+地基无线电+物理场匹配图+平均海面高数据库”组成,如图3所示。

图3 水下导航定位体系的信息源基础设施架构Fig.3 Underwater navigation and positioning infrastructure architecture
水下导航定位体系的信息源基础设施建设不仅要考虑其稳定性和可观测性,还必须考虑其网型设计[2]。海面信标网、水中信标网、海底信标网、地基无线电站网是实体基础设施,需要考虑几何分布。信标网是通过水声技术进行PNT服务的,而水声技术的服务距离有限,采用中频技术的单个基准站服务距离通常8~10 km,而采用低频技术的服务距离可达上百公里。水声导航离不开水下声速信息,水下载体导航时停下来测量声速是不现实的,事先建立声速数据库是可行的。水下声速场、物理场匹配图数据库、平均海面高数据库并不存在硬件实体,可称为数字基础设施。这些数字基础设施除考虑分辨率和精度外,也应考虑分布。如此,为了使效能最大化,实体基础设施和数字基准设施的布局设计应相隔一定距离,并且考虑冗余、互补,建成接力型(或蛙跳型)服务网。
2.4 水下导航定位体系的终端弹性化设计
水下复杂环境下,基于单一传感器的用户终端存在不连续、不准确或不可靠风险,甚至完全失去服务能力,充分利用多传感器进行弹性设计是合理的选择。水下导航定位终端的弹性化包括多传感器弹性集成和多源信息的弹性融合[40]。
2.4.1 多源导航定位传感器弹性集成
水下导航定位终端传感器包括高精度惯性导航传感器、水下声呐信号接收传感器、物理场匹配传感器、微型原子钟传感器、水深(压力)传感器、航位推算传感器等等。众多的传感器不能简单捆绑集成,也不能一味强调深度集成,而应弹性集成。简单捆绑集成的终端必然存在互相干扰、终端体积大、功耗高、可携带性差等问题,一味强调深度集成可能造成系统异常复杂、实用性差等[16]。多传感器应依据用户需要,智能感知应用场景、弹性集成,为了实现水下多源传感器的弹性集成,传感器组件整体优化设计十分必要。
1)分层次集成原则。依据各传感器特性、大小、复杂度,采用深度集成、即插即用、外部捆绑进行集成[40]。深度集成的前提是各传感器有共性组件,能共用的尽量共用,如微惯导、微型原子钟、声呐信号接收机的伺服单元、处理单元等共性组件可深度集成;高精度的惯性导航系统、水深(压力)传感器等可设计为即插即用,而重力传感器体积大、系统复杂,不易集成,可设计为外部捆绑。
2)接口标准化开放原则。水下导航定位终端的各类组件的接口必须标准化,如采用以太网口、USB口、串口、时间同步接口等,这些标准化接口遵循开发架构[40],接口标准化,便于各组件、传感器的集成,便于控制信息和数据信息的联通,便于组件、传感器的维修更换。
3)完好性监测原则。终端传感器多,水下环境复杂,影响数据质量因素也多。由于信号发射器问题、水下环境的变化等影响,会导致某些导航定位信号的不可用,信号故障诊断与检测、信号故障影响缓解、观测信号可用性确定、多源观测信号互检与评估等均应纳入完好监测范畴,如此能够确保水下PNT服务终端得到可靠的观测信号。
2.4.2 多源导航定位信息的弹性融合
可用的水下导航定位观测信息相对较多,这些观测信息对估计参数的可测性不同,有不同的观测模型,在其不同观测模型下有不同的随机模型。此外,还有不同运动状态下的不同动力学模型。在复杂的海洋环境下,其函数模型和随机模型不应一成不变,而应随外部环境的变化而弹性调整。多源导航定位信息的弹性融合应该在对函数模型误差和随机模型误差充分识别的基础上,实时或准实时地优化原有模型,使融合模型最佳地适应相应场景和相应数据源,并具备一定的抵御“干扰”的能力[25]。
水下导航定位观测信息的弹性函数模型的目的是强调模型的“可靠性”,既要具备模型系统误差的识别能力,又要具备模型误差变化规律的学习能力[40]。“可靠”的弹性函数模型要求:1)基本函数模型的统一表达,依据水下导航定位观测信号特点表示成相同的位置、速度和时间参数的统一函数模型库,将不同导航传感器信息抽象分类整理,统一到相同的理论模型框架[42];2)统一的时空基准归算,应以国家法定空间基准和时间基准为基础,确保表达的函数模型对应统一的坐标基准和时间基准;3)系统误差的弹性修正或自适应修正,系统误差的应能依据外部环境的变化而变化[4],并实时或准实时地修正原有的函数模型,使其适应当前相应的外部场景;4)函数模型的弹性选择与诊断,即强调特殊的时期、特殊的场景选择备份好的特殊模型,使得模型的适应性最佳化;5)处理算法的冗余,不仅动力学模型冗余,而且分析方法冗余。
水下导航定位观测信息的弹性随机模型强调模型的“自适应弹性调整”,即各导航定位观测信息的随机模型在状态参数估计过程中不是固定不变的,而是随着观测信息不确定度的变化而弹性变化[1]。“自适应调整”的弹性随机模型要求:1)对观测信息异常误差的影响控制,观测信息异常误差可采用抗差估计,动力学模型的异常扰动可采用在线诊断或自适应估计,若动力学模型和观测信息同时存在异常扰动,可采用自适应抗差估计法[43-46];2)观测信号噪声的在线标定,水下多源观测信息具有完全不同的不确定度。甚至在不同水下环境下,即使相同类型的观测信息或者相同类型载体运动信息,相应的不确定度也有可能不同。3)不同类观测信息权重的动态分配,多类水下导航定位观测信息融合时,应实时或近实时地确定各类观测信息的方差或权重,可以采用方差分量估计或基于实际偏差量确定的随机模型[45-46]。需要说明的是,函数模型误差与随机模型误差是可相互转换的,同时存在显著的函数模型误差和随机模型误差时,则需要同时优化函数模型和随机模型,这类混合模型优化是十分困难的[46]。
此外,水下导航定位观测信息的弹性融合处理必须采用合理高效的计算方法,如自适应滤波、因子图、并行滤波等[47-52]。也应注意到,水下用户终端能量有限,算力也有限,弹性融合处理算法尽量简洁高效,算法复杂度应低,复杂的算法在水下终端无法完成实时计算,并行计算是实现导航定位观测信息高效融合一种可行手段。
3 水下导航定位体系建设关键技术
水下导航定位体系建设的关键技术主要涉及水下导航定位服务基础设施建设和用户终端开发。
3.1 基础设施建设关键技术
水下导航定位的信息源基础设施包含实体基础设施和数字基础设施。由于这些信息源基础设施基础作用强、投资大且涉及国家安全,其建设维护应由国家或行业主导。实体基础设施建设包括设备载荷集成、基准站站址堪选(含可匹配区确定)、基准站网形架构设计、基准站位置标校与维护等。数字基础设施的建设本质上属于测绘新基建范畴,包括匹配区背景场图构建、水声速度场构建、平均海面建立等内容。本文认为信息源基础设施组网技术、背景场数据库建设技术、水声速度场构建技术以及基准站载荷设备的长距离水声导航技术是当前水下导航定位体系服务基础设施建设应优先解决的问题。
3.1.1 信息源基础设施组网技术
布局良好的信息源基础设施能提供性能优良的水下导航定位信息服务。信息源基础设施组网技术重点解决实体基准站网与数字基准站网的协调布局问题。海洋深度是有限的,最深处有万米,绝大多数区域只有几千米,依靠声呐服务的信标网所提供的几何观测强度是有限的,只有在合适的海域才能够建设信标网。水下匹配导航的背景场只有在可匹配区才具有可用性,这些可匹配区通常是地形变化较大的区域,匹配区的选择是匹配导航首先应关心的问题。另外,实体基础设施与数字基础设施的协调组网是信息源基础设施组网应重点解决的问题。依据海洋环境特点、所使用技术特点、建设成本、用户需求,进行信息源基础设施的合理布局,既保证能够提供一定覆盖范围、又保证有足够的冗余。
3.1.2 背景场数据库构建技术
背景场数据库构建技术重点解决匹配导航所必需要的背景场数据库问题。依据物理场特性有重力场、磁力异常场、地形/地貌等特征数据库背景信息。建立这些背景场数据库的技术很多,不同技术间观测资料的分辨率不同、精度不同、误差也不同,天、空、地、海各种观测数据融合存在不同的系统误差。此外,由于测得的物理场信息的空间位置不同,存在向上向下延拓问题,目前这方面研究相对较少。另外,由于观测时间不同,建立背景场数据库的基础观测数据在时间尺度上也存在变化,如何归算到参考历元时刻。并不是所有区域都能够成功匹配导航,可匹配区的选择也是必须要解决的问题。如此,构建一个与导航精度相适应的、一定分辨率、一定精度的统一的背景场数据库是背景场匹配辅助导航所要解决的核心技术问题。
3.1.3 水声速度场构建技术
水声导航离不开水声时延观测数据,声线路径上声速是水声导航必不可少的基础参数。水下载体行进中不可能为水导航停下来测量声线路径上声速,利用历史观测资料构建水声速度场是解决水声导航所必须的声速的关键技术。无线电导航信号传播路径上的无线电波速度是一常数,而声线传播路径上水声速度是温度、盐度、深度相关的非线性函数。温度、盐度具有明显的时空特性,由此获得的水声声速自然具有明显的时空特性。如何由获得的离散水文数据构建水声声速场是一个关键问题,涉及多源数据融合处理理论、异常误差控制、系统误差补偿、融合方法、处理准则等。另外,水声速度场是利用历史特定时空观测的水文数据构建的,与使用时刻是不一致的,水下声速场预报模型也是水声速度场构建技术一项关键研究内容。
3.1.4 长距离水声导航技术
长距离水声导航技术将有效解决水声导航服务距离的问题,拓展其服务应用。现有的水声导航技术常采用8~16 kHz中频信号,服务距离有限,通常小于10 km,极大限制了水声导航的应用领域与服务范围。如何降低频率、增大服务距离、而又不显著降低导航精度是长距离水声导航应用的核心关键所在。工作频率选择、信号波形优化、信号体制优选等等,直接决定了作用距离,是长距离水声导航首先充分考虑的事情。另外,主动、被动工作模式定位模型的智能切换直接决定了用户使用方法。如何提供信息安全、服务授权、抗干扰防欺骗等确保信息使用安全也是需要考虑。
3.2 水下用户导航定位终端关键技术
水下导航定位终端是水下用户体验位置服务感受最直接的设备,直接反映了水下导航定位体系的性能。水下用户导航定位终端以惯性导航、原子钟为核心、辅以其他传感器的终端,水下用户导航定位终端的物理场信息实时动态感知技术是背景场匹配辅助导航另一项关键技术。多传感器的弹性集成与多源导航定位观测信息弹性融合是其关键核心技术[16],本文不再分析。
3.2.1 微惯性导航技术
惯性导航可获得姿态、位置和速度等众多导航信息,是水下导航定位终端的核心技术之一。精度、重调周期、可靠性以及寿命是其众多技术指标最主要指标。微陀螺MEMS、微惯导具有体积小(甚至芯片化)、成本低等优点,是惯性导航的主攻方向之一。包括光纤陀螺、环状激光陀螺、原子陀螺、微原子核磁共振螺旋仪等单个小型、微型、甚至芯片化、成体系的新型陀螺研究,美国先后启动了这个方面7项研究计划[24]。此外,多个具有不同特性的微型惯性测量组件,集成到单一的微尺度测量单元,也是微惯导研究的重要组成部分。另外,初始对准也是惯性导航系统的一项共性关键技术,包括静基座对准与海上动基座对准,初始对准误差对导航参数影响是系统性的,如何又快又准地进行初对准一直是惯性导航努力方向。惯性导航受众多误差的影响,包括漂移误差、标度因子误差、温度误差等,这些误差的标定、补偿与校正(含在线标定与补偿)是提高系统精度与可靠性的重要方式,也是难点问题之一。
3.2.2 微原子钟技术
时钟传感器除了提供水下导航定位终端的时间信息外,还为水下终端的陀螺仪、加速度计等传感器提供时间频率和时间同步信号,大大提升了终端系统性能。芯片原子钟是当前微时钟发展重点方向,国外已具备规模化生成能力[52]。微时钟、芯片时钟有利于实现小功耗的实现、多传感器的集成,其精度较常用晶振高5个数量级,准确度和长期稳定性高,且具有守时功能。它主要由物理封装、射频模块和伺服环路控制模块组成,物理封装部分是其最核心部分。近年来,我国虽然芯片级原子钟取得了长远发展,但仍有许多关键技术需要突破,如真空泵、光隔离器以及组件集成等[55-56]。另外,芯片级光学原子钟由于具有更高的频率、更高的准确度,能把时间分割成更小的单位,有一个“高品质因子”,有望成为下一代芯片级原子钟。其光学频率梳连接了微波频率和光学频率,能够将光学频率传递出去,是实用化光学原子钟研究的最核心技术[52]。
3.2.3 物理场信息实时动态测量技术
物理场信息实时测量包括重力测量、磁力测量和地形/地貌测量等,这些物理场信息的实时动态测量是水下物理场匹配导航的三大关键技术之一[37-39]。海洋重力测量的实质是相对重力测量,受到多项扰动的影响,必须要对这些扰动进行相应的高精度改正才能获得高精度的测量值[37]。零漂是相对重力测量最大的影响因素,传统方法是用绝对重力控制网来约束和改正,无零漂或低零漂的海洋实时重力测量与处理技术是重力匹配辅助导航的一项关键研究内容。重力梯度测量不受等效原理限制,也不受载体运动加速度影响,适合动基座平台,并且可得到多个分量结果,也将成为动态实时重力测量的有效手段。磁力测量的新型磁强计、原子磁力梯度仪器等新技术,在高精度、小尺度磁场环境探测应用发展方面潜力巨大[38]。此外,获得三维、二维高精度海底地形、地貌的合成孔径声呐、干涉合成孔径声呐是地形匹配导航定位的另一核心技术[38]。
4 结束语
水下导航定位体系是综合PNT体系的重要组成部分,与综合PNT体系有着紧密联系,应遵循综合PNT体系所要求的弹性PNT架构、微PNT等要求。但由于水下环境特殊,建设难度大、技术复杂、花费成本极高、并且用户相对少,水下导航定位体系建设不同于服务陆地、海面、航空的PNT体系,有其特殊性,应依据其特定用途合理按需建设。
水下导航定位的技术体系是以惯性导航、原子钟为核心的多机理技术组成的技术体系,BDS等卫星导航作为标校技术支撑水下导航定位服务,如此的技术体系设计确保了水下导航定位技术的多机理性。水下导航定位的信息源基础设施设计为由服务于水声导航的信标网实体基础设施、服务于匹配导航的数字基础设施,以及支撑水下导航定位服务的平均海平面数据库、水声速度场数据库等数字基础设施组成。这些信息源基础设施不仅强调其稳定性和可观测性,还应充分考虑其网型优化设计、合理布局(分辨率)和冗余性。由于其基础作用强、投资大、建设难度高,且涉及国家安全,水下信息源基础设施建设应由国家、行业结合国家综合PNT基础设施建设综合考虑。终端弹性化设计强调遵循分层次集成、标准化接口、完好性监测等原则的多传感器弹性集成,以及强调函数模型下系统误差弹性构建和随机误差的自适应调整的多源信息弹性融合,充分多源信息,满足水下用户导航定位服务服务的可用性、精确性、可靠性、连续性和稳健性等要求。
当前水下导航定位弹性建设的关键技术不仅应包括信息源组网布设技术、背景场数据库构建技术、物理背景场延托技术等基础设施建设关键技术,还包括微惯性导航技术、微原子钟技术、背景场信息实时测量技术等水下定位终端关键技术。基础设施建设关键技术是发展的重中之重,PNT终端关键技术是提升PNT优良服务的用户最直接的关键。
