水下网络系统定位与控制联合设计:研究现状与发展趋势
2024-01-08闫敬张志成杨晛商志刚关新平
闫敬, 张志成, 杨晛, 商志刚, 关新平
(1.燕山大学 电气工程学院, 河北 秦皇岛 066004; 2.燕山大学 信息科学与工程学院, 河北 秦皇岛 066004; 3.哈尔滨工程大学 水声工程学院, 黑龙江 哈尔滨 150006; 4.上海交通大学 电子信息与电气工程学院, 上海 200240)
海洋是国家战略资源的重要基地。我国拥有300万平方公里海域面积,然而我国海洋监测体系还不完善,水下目标监测手段匮乏。无论从国家战略层面,还是从海洋预警监测、海洋资源开发与保护方面,亟需构建实用高效的水下网络系统。水下网络系统的建立在对船只的远洋、深海作业的安全保障方面起着无可比拟的作用,海洋无小事,事关我国国土安全,资源开发和研究勘探等众多战略部署。2022年11月最新公布的《国家自然科学基金“十四五”发展规划》,强调了海洋安全的重要性,指出将“水下无人装置与水面船舶互联基础理论为代表的空天地海协同信息网络”放在十四五规划的优先发展领域。一般而言,水下网络系统包括移动潜器(通过携带传感器形成动态传感器节点)、水面浮标、水下温盐深等传感器,主要以水声通信的方式进行交互,进而协同完成水下目标监测任务。在上述系统,定位是水下网络系统实现目标全天候、全方位实时监测的核心,其目的是通过节点间信息交互确定网络自身以及外来目标的位置信息。另一方面,岸基中心根据定位的需要形成调度控制环,并将控制指令回传给传感器与潜器,进而通过潜器协同控制的形式实现定位自主性和适应性的提升。现有方法通常将定位与协同控制分离设计[1-2],尽管可降低系统设计的复杂度并易于扩展,但会使通信资源相互竞争,且使得状态信息传递出现延迟,在复杂多变的水下环境中,更容易产生控制偏差与定位误差。因此,有必要对水下定位与追踪控制进联合设计,联合提升定位与控制性能。
1 定位与控制联合设计的挑战
在水下网络系统中,水声异步时钟、声线弯曲、传输高能耗等弱通信特性,以及水下时变流速场等复杂海洋环境,导致水下网络系统面临目标定位误差大、协同控制性能差、系统间耦合关系[3]表征不清等难题。如何在复杂海洋环境下克服水声弱通信特性影响,突破水下高精度定位与协同控制的技术瓶颈,对水下定位与控制进行联合设计(见图1),已成为研究面临的挑战。需要强调的是,定位目的是确定水下目标以及节点的位置信息,进而考虑异步时钟、声线弯曲、通信时延、噪声与干扰等约束。将协同控制与定位联合设计,一方面使得定位为控制提供位置参考,另一方面使得控制反馈提升定位精度,最终提升整个水下网络系统定位精度与控制有效性。

图1 定位与控制联合设计Fig.1 Joint design of localization and control
1.1 水下资源受限条件下异构数据融合难
构建水下网络系统时,为了适应不同环境下不同的监测要求,往往要将异构终端[4]部署在不同的物理空间。但复杂的水下环境会导致终端感知到的数据出现难以规避的时空偏差;同时由于设备的物理特性,异构终端获取到的来自感知对象的数据信息是不全面的,彼此之间具有差异性,甚至会出现冲突。为此,异构数据的融合有助于时空覆盖范围的扩展,提升状态信息的准确性。而水声通信的带宽受限,设备之间数据传输速率较低,限制了异构数据实时计算处理能力。综上,如何及时考虑异构终端感知到的数据差异性,构建感知融合模型至关重要。此外,异构终端能量来源有限,往往是采用电池供电,同时水下环境的不可见性与不可访问性,又使设备的故障检测、维修和替换变得更加复杂。因此,异构终端除考虑自身监测和感知能力外,还应考虑终端间的交互、设备耐用性和能量有效性。
1.2 水声弱通信特性导致定位误差大
目标定位需要传感器与潜器测量的物理量作为输入,而物理量信息以声波为载体,以海水为传播介质。水下通信环境恶劣,引擎声、水生生物活动声、海浪与潮汐声等环境噪声会影响信号的信噪比,导致接收到的信号失真,难以准确解析,从而产生定位误差。此外,信号在传播过程中受反射和散射等因素的影响会产生多径效应[5],信号发送端与接收端之间的相对位移会引发多普勒效应从而导致载波偏移及信号幅度的降低,与多径效应并发的多普勒频展将影响信息解码,使得目标动态感知困难。同时,水下各节点的本地时钟的差异引发的时钟异步问题与非均匀介质引起声速大范围变化导致的时延抖动和声线弯曲效应将进一步降低定位的质量。
1.3 复杂海洋环境降低协同控制有效性
随着水下网络系统向大型化和复杂化发展,网络中的传感器节点数量增多,节点之间的连接和相互作用也变得更加复杂。同时,协同控制需要节点之间进行频繁的数据信息流通与交换来实现任务的分工、协同决策和共同目标的完成。由于水声信道通信距离短、链路稳定性差以及洋流等动态扰动与节点的移动特性导致的水声通信网络的脆弱性及时变性,会产生局部摄动、状态延迟与链路动态。这些不确定因素通过水下网络系统的连接及耦合关系不断传播,直接或间接作用到控制单元,严重降低了系统协同控制的有效性。因此,在对水下网络系统的控制与优化过程中,除了需要考虑单个传感器或潜器的反馈控制率[6]外,必须综合考虑水下环境与通信性能的影响,统筹整个网络系统的全局优化。遗憾的是,由于目前技术水平的限制,很多重要的状态无法实时反馈,关键的参数难以准确测量,直接影响到潜器之间的协同策略以及各控制器的具体实现。
2 水下网络系统定位技术
水下网络系统定位技术是水下传感器技术与水下通信技术相结合的一个重要分支。通过具备感知、传输、控制功能的水下传感器或潜器进行数据的采集、处理和分析,获得被定位目标的位置,在海洋领域已有广泛的应用[7]。
2.1 水下网络系统
水下网络系统一般由3个部分组成:传感器节点部分、通信与数据传输部分、网络管理与控制部分[8]。传感器节点是网络中的基础组件,它们被部署在水下环境中,用于感知和采集环境中的各种信息。通信与数据传输部分包括水下通信设备和数据传输协议,用于实现传感器节点之间的通信和数据传输。网络管理与控制部分涉及网络拓扑管理、节点部署与维护、数据采集与传输调度等任务,通常由位于地面或云端服务器的岸基服务中心担任[9]。岸基中心收集和处理水下传感器节点传输而来的数据,具有强大的数据处理能力。同时提供网络监控、维护和管理等功能,以便确保水下网络系统的安全性与可靠性。图2给出了一个常见的水下网络系统架构。

图2 水下网络系统架构Fig.2 Underwater network system architecture
2.2 水下通信技术
由于水下环境的复杂性和通信信道的不稳定性,传统的陆地通信技术应用在水下环境时往往要面临失灵的风险。目前,水下通信主要以声波的方式所实现,并经过30年左右的发展,在理论和实验研究上均取得了长足的进步,但仍有诸多难点:1)水声通信具有严重的带宽限制,同时声学信号比无线电的传播速率低5个数量级,信号传播速度慢;2)受水下介质不均匀性而引起的声速大范围变化(1 400~1 600 m/s),往往会产生时延抖动和声线弯曲效应;3)声波信号在水中传播时,由于反射、散射和衰减等因素的影响会产生多径效应,进而导致产生传播延迟扩展和信号失真,降低通信质量;4)水下布设通信节点成本高,导致拓扑结构稀疏;5)水声通信在信息传输过程中会产生能量扩散,且通信能量大;6)由于水下通信位于开放的环境,会遭受未知攻击者的攻击和窃听。针对这些难点,研究者们正在不断探索和开发新的通信方式和技术来提高通信能力,改善声波传播模型和相关调制解调技术等提高通信效率和可靠性,同时不断完善水下节点的设计和部署方式,以适应复杂的水下环境。这些努力将为水下通信技术的发展和应用提供有力支撑。
多载波调制技术可以极大地提高带宽利用率,正交频分复用(orthogonal frequency division multiplexing,OFDM)便是一种经过验证的多载波通信系统,具有有效应对频率选择性和延迟扩展的能力。Murad等[10]设计了一种用于水下通信的OFDM仿真模型,并提供了一种修改和调整各种参数的工具。Zhang等[11]设计了一种基于深度学习的OFDM接收机,与现有的深度神经网OFDM接收机相比,使用该模型可以精确定制更加复杂的水声通信。而单载波频域均衡技术(single carrier frequency domain equalizati,SC-FDE)能够降低多载波系统的峰均比和对相位噪声的敏感性,同时计算复杂度较低。Si等[12]提出了一种先验信息辅助方案,通过在SC-FDE传输帧中插入循环前缀作为保护间隔,获得更精确的信道长度和稀疏度先验信息,避免组间干扰。Tong等[13]提出了一种基于迭代子块的接收机算法,将每个时变块划分为多个准静态子块,后通过迭代削弱频间干扰。同时根据水声的传播特性提出了时间反转技术,利用声场的线性和互易性,把海洋信道本身当作匹配滤波器,对阵接收信号进行合并处理。该技术可以提高水下网络系统的通信速度和可靠性,降低通信功耗,减少信息传递的延迟,并且增强水下通信的抗干扰能力。Jing等[14]设计了一种二维被动时间反转结构接收机,在时延多普勒域实现了空间、时间和频率聚焦,可以在较低的复杂度下获得与传统消息传递算法相似的性能。Zhao等[15]利用声学链路空间依赖性产生的自然链路特征,提出了一种利用最大时间反转共振能量值的认证方案,用于检测欺骗攻击。此外,为了应对可能存在的攻击和窃听风险,军用通信往往对隐蔽性有一定的要求。文献[16-17]研究了使用仿生技术来进行伪装的水下通信方案,信号发射源通过模拟海洋哺乳动物叫声来传递信号。但由于海洋动物往往有其特定的分布区域,例如在没有海豚的区域,便无法通过模仿其声音来进行伪装。为此Biao等[18]提出了一种将信号隐藏在自然背景噪声和混响中的通信方法。
随着科技的不断进步,激光通信和电磁通信等通信手段也逐步应用于水下网络系统,其特点如表1所示。Zhang等[19]提出了一个受宽带背景噪声影响的水下无线光通信系统性能的数值模型和相关过滤条件,Zhou等[20]建立了水下无线光通信的数学模型,对50 m以上的远距离无线光通信进行设计。Yang等[21]提出了一种基于超紧凑极低频磁力传输换能器的远程水下电磁通信系统,实现了数字编码调制跨越水-空界面的远距离传输。

表1 3种水下通信技术的比较Table 1 Comparison of three underwater communication technologies
2.3 定位算法
水下网络系统中常用的声学定位方法可分为3类[22]。第1类是基于到达时间(time of arrival,TOA)的方法,基本原理是测量水下传感器节点到定位目标的时间延迟。由于时间延迟与发射端到接收端的距离成正比,因而可以通过计算不同传感器节点到目标位置的时间延迟,推算出定位目标的位置。TOA定位结果的准确性,高度依赖视距路径测量的准确性。然而,真实的声学信号在水下信道传播的过程中往往会受到严重的多径效应的影响,并且声线是弯曲传输的。为此,文献[23]利用分层近似、逐层计算的方式对声线进行补偿,文献[24-25]给出了时钟异步与声线弯曲模型:
T=αt+β
(1)
(2)


图3 发送点和接收点之间声线弯曲示意Fig.3 Schematic diagram of sound line bending between the sending and receiving points
需要注意的是,基于到达时间的定位方法非常依赖于时间的同步,并且常常配合其他的技术一起使用。Peters等[26]便提出了一种基于混合到达方向(direction of arrival,DOA)和TOA的无线传感器定位算法。而Yi等[27]提出了一种基于TOA的跟踪同步方法,用于解决分布式水下网络系统数据传输不并发而导致的时间同步问题。同时,大多数基于多径信道的TOA估计方式,都是利用直达信号和反射信号之间的互相关特性来消除多径效应的影响。鉴于此,Kostenko等[28]首先计算接收信号的镜像导数,后通过移动平均值对结果进行归一化处理,用于实现检测强反射信号中的弱直达信号的目的。Jiang等[29]将信道参数的估计问题转化为稀疏表示问题,从而实现二维网络中的时间延迟和多径信号衰减幅度的联合估计。但以上方法,计算量庞大,这对于需要迅速反应的实时水下网络系统来说是难以实现的。于是Sund等[30]提出了一种基于决策树的直接信号选择算法,并实现了对直达信号的高速率和高精确率选择。此外,为避免水下动物咬合,气泡破裂、潜器引擎震动等产生的强噪声干扰水下网络系统,Diamant等[31]在TOA定位的过程中引入一种聚类的方法来将匹配滤波器输出处的样本识别为信号或噪声。
第2类是基于到达时间差(time difference of arrival,TDOA)的方法,其主要原理是利用定位目标到达水下传感器的时间差来计算目标位置。此方法无需获知两者之间的传输时间,因此目标源和传感器之间可以是异步的,但是传感器之间需要同步。具体过程包括:收集传感器数据、计算时间差、构建目标函数、求解目标位置。首先,水下传感器接收声波信号,并分别记录各自的时间戳,然后计算传感器之间的到达时间,利用时间差构建距差方程。在之后的求解过程中,可以分为迭代求解法和非迭代求解法。由于水下环境复杂,受到多径效应和声线弯曲的影响,目标函数一般较为复杂,很难通过求解非线性方程组来计算目标位置,故常常采用智能优化算法进行迭代求解。通常TDOA需要至少4个传感器,才可对三维空间的目标进行定位。但Mandi等[32]在通过压力传感器确定水下声源深度位置的情况下,实现仅仅使用2个声波接收器便实现了对目标的定位,降低了系统网络的复杂度。同时,对水下网络系统而言,为延长传感器节点寿命,应避免频繁采样,Fyhn等[33]使用压缩传感(compressed sensing,CS)的方式来减少传感器采样,在已知表示矩阵的情况下,信号的奈奎斯特率样本可以从其子奈奎斯特率CS样本(CS序列)中恢复出来。但是由于所有CS-TDOA估计都需要从亚奈奎斯特速率CS序列中重建,而重建算法又是非线性的,这在水下强噪声环境中,会产生很大的误差。由此Cao等[34]提出了使用部分傅里叶系数以实现CS-TDOA估计的非相干处理。Salari等[35]利用Hadamard矩阵的性质,提出了一种避免CS重建的新框架,并使用CS测量直接计算目标位置。此外,Mourya等[36]为大规模水下网络系统提出了具有鲁棒性的TDOA定位方案,即仅通过监听来自多个锚点的信标信号,以此达到节省信道带宽和能量、延长节点寿命的目的。Kim等[37]设计了一组通过计算TDOA测量来捕获目标的潜器编队,能够避免目标估计的发散,提升定位性能。而考虑到水下网络系统可能会出现由于缺少传感器接收节点而导致定位模糊与传感器节点间无法协作的情况,Alexandri等[38]提出了一种到达目标运动分析时间差的定位算法,该算法通过在非凸平面上求解非线性优化问题,获得目标位置。Sun等[39]提出了一种广义的二阶到达时间差定位算法,消除了信号周期数的限制,且可以任意选择定位节点,从而提高了水下网络系统的定位精度。
第3类是基于到达方向的方法,与前两者不同,水下传感器接收端有多个换能器,通过测量换能器接受信号的相位差或者时间差,进而计算信号到达的方向角,最终推断出定位目标的位置。在这个过程中,传感器使用多个换能器接受信号源发射的声波信息,通过预处理来提高信号的质量和准确性,后根据各类测量方法,如时间差法、多普勒频移法、相移法等,得到信号到达角度,最后将角度代入计算模型后得到目标位置。DOA方法具有系统结构简单、易于获取角度信息等优点。但由于DOA估计的性能依赖于信号端阵列的大小和换能器数量,而部署在小型潜器传感器上的列阵很难达到其理想状态。为此Li等[40]通过研究方向相关传输响应的空间稀疏性,提出了小尺寸阵列DOA估计方法。Yang等[41]引入了压缩传感算法,以实现对小单元阵列的高估计精度。而考虑到多径效应对水下网络系统定位精度的影响,Das等[42]提出了一种基于稀疏贝叶斯学习的相关向量计算法,Xiang等[43]提出了3种用于多径环境下DOA估计的神经网络模型,Xie等[44]实现了对多径信号的信源关联、DOA和衰落系数估计,Han等[45]提出了一种基于空间时频分布的水下多径信号被动波到达方向估计算法。考虑水下环境声速不确定的影响,可使用声速无关的方法,文献[46]使用2个任意相交的均匀线性阵列来估计水下DOA,文献[47]利用3个交叉线性阵列接收到的数据的互相关矩阵(CCM)来去除声速因子。此外,Moreno等[48]通过优化传感器在水下网络系统中的部署位置来提高DOA定位精度。Kavoosi等[49]提出了矢量和各向同性水听器相结合的DOA方法来估计水下三维网络中未知源的位置。
3 协同控制技术
水下网络系统的定位需要通过对多个传感器与潜器的协同控制来实现。协同控制架构为协同控制提供了基本的组织结构,而协同控制策略则在这个基本结构的基础上,使各个节点能够协同工作,实现系统控制目标的完成。
3.1 协同控制架构
协同控制网络架构在水下网络系统中起着关键的作用,它定义了传感器之间的通信和协作方式,影响传感器之间的信息交换、决策协调和任务执行。通常水下传感器的拓扑结构有3种主要的形式:集中式、分布式、分层式。在集中式[50]架构中所有传感器节点都要通过一个中央控制器来进行数据的传输与信息的交换。优点是,由于所有的传感器节点都连接着中央节点,能够便于中央控制器管理和控制整个水下网络系统。并且当需要增加新的传感器节点时,很容易并入到网络系统当中,提高了扩展性。但是当中心节点出现故障时,会导致整个网络的瘫痪。而分布式[51]架构不需要中央控制器,传感器节点之间可进行自由的相互通信,每个传感器都与整体的子集共享信息。这样因某些节点出现故障导致无法工作时,剩余节点仍可发挥作用,能够尽可能保证水下网络系统的正常,也可通过数据分割、分布式储存来保证传输数据的安全性。但与之相对的,分布式架构带来了更高的复杂性与通信成本。分层式[52]架构将传感器划分为多个层次,并要求传感器按照不同层次进行协作,通过各自的协议层传递信息和控制指令,实现对水下网络系统的操控。分层式通信可以灵活的根据不同的通信需求选择相应的通信协议来满足需求。并且在一次等长距离的通信数据传输的过程中,分层传输的消耗的能量要小于集中式传输。但分层式架构设计复杂,要考虑不同层级节点之间的交互与协同。
3.2 水下环境中潜器协同控制策略
潜器的协同控制指的是在水下环境中,通过多个潜器之间的通信与协作,共同完成水下任务。静态传感器往往探测范围有限,当被检测目标超出其探测边界时,便无法提供目标位置的信息。因此,可以通过部署一定数量的能够自主移动的潜器,扩展探测范围,亦可对水下目标进行近距离探测,在搭载视觉模块的情况下,收集、回传视讯信息。还可以根据需要向传感器提供自定位参考的同时,对传感器数据进行中继转发与拓扑修补。因此,潜器之间合理的控制十分重要[53]。
通常,对于潜器的控制一般有基于领导者-跟随者、基于虚拟结构、基于人工势场、基于图论以及基于行为这5种。基于领导者-跟随者[54-55]的控制方式是目前对潜器进行协同控制最常用的一种,潜器被划分为领导者或跟随者2种,跟随者根据设定追随领导者的轨迹,控制中心通过控制领导者来控制整个潜器编队。而虚拟结构法[56-57]将所有潜器作为一个虚拟整体,设定一个虚拟几何中心,并以此为参考,进行潜器的协同控制。但由于需要保持同一个刚性结构,缺乏灵活性和适应性。相对的,基于行为的控制策略[58-59]灵活性更强,因为每个潜器根据其感知到的环境信息或者是设定的目标任务,选择适当的带有目的性的行为或动作来响应其他潜器或者与环境进行交互。同样,人工势场法[60-61]也有着较强的灵活性与实时性,能够解决潜器的水下避障问题。主要思路是将水下空间抽象设定为人工势场。通常有2种势场:吸引势场和排斥势场,引力势场能够将潜器吸引到目标点附近,而斥力势场则使潜器避开水下礁石、珊瑚等障碍物。最后,在基于图论[62-63]的方法中潜器协同控制系统被建模为一个图结构,图中的节点由潜器担任,图中的边为潜器之间的关系和通信路线。
潜器模型的不确定会影响潜器的控制,从而影响编队控制的稳定性。为应对潜器航行过程中的不确定性,Qiu等[64]提出了一种基于梯度下降的自适应学习控制方法并设计了误差补偿策略,Li等[65]提出了基于微分几何的精确反馈线性化滑模控制方法。Yan等[66]采用了位置/速度双层通信拓扑,并根据环境的恶劣程度将其通信状态分为有界和无界通信时变拓扑,并分别使用领导者-跟随者和虚拟领导者方法对所提出的方法进行了论证。同时考虑到多普勒速度测仪在水下环境里不可用,文献[67]开发了一种速度观测器(图4),联合设计了一种自适应非奇异快速终端滑模追踪控制器,使用自适应方法估计模型的集总不确定性。

图4 观测器与追踪控制器之间的关系Fig.4 The relationship between observer and tracking controller
为降低能耗,Yan等[68]使用混合了人工势场法和粒子群优化的算法,通过不断调整编队路径节点的数量和分布状态,寻求最优路径。Zhu等[69]利用生物启发式神经网络实现编队路径规划和有效导航。同时水下环境中,潜器之间的持续通信是困难的,为此Wang等[70]提出了一种基于间歇通信的任务分配机制来解决线性和非线性系统的协同控制问题,Chen等[71]对具有间歇性无向通信的多自主水下航行器系统设计了一种有限时间无速度交会的控制方法。此外,Yan等[72]提出了一种分散观测器-控制器方案,为每个潜器开发一个观测器来估计系统的整体状态,然后将其与集体任务变量集成以产生控制输入,同时降低了执行器饱和的风险。Lin等[73]在部分执行器故障时,使用基于线性反馈方法,对潜器进行线性化处理,从而提升控制系统的容错能力。而在真实水下环境里,多潜器协同控制系统与多潜器节点相比,信道在受到海洋环境干扰或对手攻击时往往更容易出现故障,因此对其可靠性的评估变得越来越重要[74],Liang等[75]确立了标准秩分布熵、全终端可靠性和标准自然连通性3个指标用来反应多潜器协作系统可靠性的不同方面。
4 定位与控制联合设计
在弱通信环境下,如何对水下网络系统进行设计,实现定位准确性与控制协同性的整体提升,是目前研究面临的重点。
4.1 使用固定锚节点进行设计
首先是使用固定锚节点进行定位。在所需要进性目标定位的区域架设浮标[76],浮标装备全球定位系统(GPS)或者北斗定位模块,能够通过卫星进行低成本的自定位。然后,这些明确自身位置信息的浮标,将作为位置感知锚节点发布自身的位置和时间信息,水下传感器根据这些信息进行自定位。但是这种方式对于大型水下网络系统来说是非常不经济的,为确保定位的准确性,浮标的覆盖密度必须和水下传感器的密度相当。类似的,也可以选择一些传感器节点赋予位置和时间信息,并将这些节点作为其他传感器节点自定位的锚节点。一旦传感器被定位和同步,它也将作为一个锚节点来使用。不断迭代上述过程,直到所有的传感器完成位置定位和时间同步。这种模式最主要的问题是精度低[77]。这种系统的定位和定时精度高度依赖于锚节点的数量,在初始锚节点数量较少的情况下,系统的性能将受到严重制约[78-79]。此外,定位误差在迭代中不断传递,导致与真实位置偏差较大。同时静态的传感器很容易遭受攻击,为了使开放的水下定位系统能够安全稳定的运行,文献[80]针对时间延迟攻击,将目标定位和攻击检测表述为整数规划问题,使用期望最大化联合求解攻击大小与目标位置。文献[81]设计了水下传感器节点的攻击检测与隐私保护定位算法,并给出了相应的攻击与隐私模型。图5为文献[81]给出的隐私保护实例。

图5 隐私保护策略的实例Fig.5 Examples of privacy protection policies
4.2 引入移动锚节点进行设计
由于固定锚节点覆盖的范围,严重限制着其探测定位范围。而在广阔的海域中部署广泛的传感器节点需要大量的成本和资源。考虑其经济性,故在水下网络系统中引入潜器作为移动锚节点进行定位。控制潜器沿着预先设定的轨迹进行行驶,并定期对水下传感器释放信标信号。在潜器信号覆盖范围内的任何传感器都可以接受其广播的信标信号,然后通过定位算法进行定位。潜器也可以被动的接受由传感器发出的信号,继而根据信号定位目标设备。总的来说,使用移动锚节点可以提供更灵活、精确和适应性强的定位解决方案。它们能够适应不同的定位场景,提高定位精度,因此在许多应用领域中具有重要的优势。对水下网络系统而言,海洋环境中的潮汐和水流的运动会产生强噪声,从而对水下传感器接收端获得到的水声信号产生影响。并且海洋运动还会造成水下传感器节点的移动,从而影响定位精确性与控制准确性。故在包括潜器和水下传感器节点的混合架构下,文献[82]考虑到传感器节点的移动性,提出了一种移动性预测策略来计算下一时刻节点的位置,文献[83]设计了一种基于无迹卡尔曼滤波的水下异步定位算法,消除强噪声特性的影响。但是在求解的过程中,需要对算法里的非线性测量方程进行近似线性化处理。这种近似处理的方式不可避免的会引入系统的模型误差,从而导致定位与控制性能的下降。为此文献[84]使用无迹变换来计算雅克比矩阵,后使用最小二乘求解,从而避免了近线性化产生的模型误差。但由于最小二乘的特性,求得的结果可能是局部最优解,而不是全局最优解。以往在陆地环境中,通常采用凸优化的方式使局部最优解为全局最优解。而考虑到水下这种具有复杂约束的问题,在凸优化转换的过程中非常困难甚至无解。故文献[85]将迭代学习应用于定位过程,并分别设计了基于监督学习、无监督学习与半监督学习的水下定位算法。
文献[86]考虑水流等物理场对水下网络系统定位性能的影响,提出了一种捕获未知水流参数的迭代最小二乘的估计方法,实现了弱通信约束下定位与流速场联合估计、克服了流速场对控制过程带来的不确定性,提高了定位精度。而文献[87]给出了一个包含水面浮标、潜器、主动和被动传感器节点的水下网络系统,提出了一个潜器辅助的定位与控制联合设计的方法,其中潜器为定位任务提供了空间重用机制(见图6)。整个过程通过定位通信协议实现了对整个网络的联合控制。此外,Gong等[88]提出了一种基于多普勒频移的水下定位算法,控制潜器协同定位,在保持低复杂度的情况下提高了定位精度。Wang等[89]提出使用单个水面移动机器人和潜器进行协同定位,在降低了控制难度的同时,削减了成本。

图6 时间戳传递过程Fig.6 The process of timestamp transmission
4.3 定位与追踪联合设计
潜器追踪控制的实现对反馈提升定位性能至关重要。现有的潜器追踪控制方法,通常假设潜器位置是已知的且传感器的反馈信息是可靠实时传输的,然而水声长时延、高能耗等弱通信特性使得上述假设在水下环境中很难保证。同时水下很多环境往往缺乏固定的参考节点,GPS也无法在水下使用,尽管可通过自定位的形式向控制系统提供位置参考,但是水下自定位系统与控制系统在带宽占用、能耗利用上存在互相竞争关系,潜器在航行过程中惯性测量单元受到加速度计漂移、陀螺仪噪声等因素的影响,控制误差不断累积。此外,与陆地机器人相比,水下潜器的动力学模型呈现强非线性、高耦合等特点,且受水流、复杂水底地貌、水中悬浮物等外部因素影响,使得建立潜器精确的动力学模型非常困难,上述因素增加了潜器追踪控制的难度。如何克服定位不完整约束,设计潜器追踪控制器,以反馈提升水下定位-组网整体性能仍是一个开放且极具挑战性的难题。Liu等[90]采用交互式多模型跟踪算法来控制潜器,并将时间同步与定位相结合,用于提高移动情况下的定位精度。Paull等[91]采用协同定位技术,在对潜器控制的过程中,通过相互通信和合作,共同实现对目标位置的估计,从而提高定位的准确性与控制可靠性。文献[92]提出了一个基于多潜器协同定位的轨迹规划的框架,并在此基础上推导了多潜器的可扩展协同定位和多潜器的轨迹规划算法。其中使用可扩展协同定位来解决控制过程中惯性测量不断累积误差而引起的精度下降问题,轨迹规划算法则将轨迹规划与定位问题制定为同时考虑目标检测概率和跟踪精度的凸优化问题。文献[93]将当前的信息融合到置信度传播消息传递的方案中,使用流速场辅助协同定位降低了惯性测量累积误差的影响,从而有效地减缓了潜器定位误差的增长。文献[94]开发一种基于强化学习的追踪控制器,利用自定位和潜器之间的反馈关系(图7),解决了在网络信道异步时钟通信和物理信道模型不确定性约束下潜器的自定位与跟踪问题。具体来说,先使用基于强化学习的定位算法来对潜器位置的位置进行估计,然后通过基于可伸缩采样强化学习方法的追踪控制器驱动潜器到目标点。

图7 潜器自定位与追踪控制关系Fig.7 Relationship between self localization and tracking control of underwater robots
在以上网络设计中,潜器需要知道彼此的位置信息来避免碰撞,或充当定位节点。节点之间相互通信,数据交换频繁。为保证组网通讯过程的高效与可靠,同时减少能量的消耗,学者们从路由及其MAC协议等角度对通讯协议进行设计。Molins等[95]利用水下环境中较长的时延来实现多个数据包的并发传输,减少数据碰撞的可能。Noh等[96]则开发了能够适应信道随时空变化而产生改变的动态拓扑MAC协议。此外,Xia等[97]结合二分图与维诺图来降低通信能耗。Lu等[98]将通信地图嵌入到通信协议之中,确保通信中断状态下的拓扑连通性。Yan等[99]使用最优刚性图的方法,实现拓扑连通性与能量有效性的协同最优。
5 思考与展望
在过去几十年中,我国水下网络系统发展经历了从无到有、从弱到强的过程,并且随着技术的不断进步和设备的持续更新,在蓬勃发展的同时,也出现了新的趋势。基于此,从如下层面对水下网络系统未来进行思考与展望。
1)多源融合的水下定位。
由于水下环境的特殊性,单一的传感器或数据源可能无法提供足够准确的定位信息。而多源融合技术就像人脑处理综合信息一样,将不同类型的传感器测量数据进行融合与集成,从而获得更全面、更可靠、多维度的定位信息,充分利用数据冗余性和互补性,弥补单一传感器的局限性和不足。例如,水下声呐传感器可提供距离和深度信息,而水下视觉传感器则可提供地标和目标识别等信息,将2种传感器的数据进行融合,从而生成更准确的定位结果。但考虑到水下环境的复杂性以及定位目标机动性等因素的限制,如何对动态多源传感器信息进行高效融合,从而组建水下定位网络尚未得到充分解决。
2)水文信息的快速获取。
相较于陆地环境,海洋环境中传感器定位与潜器的航行需要三维水文环境信息,如声速剖面图、洋流信息、内波情况等。水下环境的变化不仅影响声波的传播,还会影响传感器与潜器的性能与航行安全。在潮汐变化的时候,海水之间流动混合,造成海水的盐度和压力发生短期变化,声线传播途径改变导致以往的水文信息过时,如果继续沿用会导致产生定位误差。因此,对海洋环境进行不同尺度的预测是必须的。根据指定海域的历史水文信息,气象卫星以及浮式观测平台获取的实时观测信息,及时更新并调整海洋动力模型的参数和状态,从而更准确地模拟和预测海洋环境的动态变化,是未来研究的重点。
3)虚拟仿真平台的搭建。
虚拟仿真实验平台能够模拟真实的水下环境,并且根据需求进行灵活调整和控制,进行虚拟环境下的定位预演。操纵者通过对水下场景参数的自定义,如水流速度、水下地形、水声传播特性等,满足不同的测试和研究需要,这种可控性使得对定位算法的评估更加方便和准确。同时,可以生成不同的环境来对潜器进行训练,从而使潜器能够适应持续变化的海洋环境。在虚拟水下仿真实验平台中,通过预先优化和验证,在降低了潜在安全风险的同时,减少设备损耗和维护费用,并节约时间和人力资源。但现有的虚拟实验平台其真实性和准确性仍有待提高,需要进一步改进模型和算法,考虑更多的物理和环境因素,以更好地模拟真实的水下条件。
4)探测-通信-控制一体化。
定位组网在探测-通信-控制一体化体系中起着承上启下的作用,但现有的水下探测、通信与控制系统往往是独立的。探测系统聚焦于使用声呐装置来接受目标辐射源传来的噪声与信息,通过滤波、傅里叶变换、解码等信号处理的手段,提取目标的方位和距离等信息。通信系统主要关注如何设计高效率与高性能的水下网络系统通信协议,使水声信号在发射端与接收端之间进行可靠传输。控制系统主要关注如何设计多种类型的控制器,实现潜器平稳运动。探测系统与通信系统功能上具有一定的重叠性,如果分离设计只考虑彼此的最优设计方案,会造成在频谱资源、能耗上的相互竞争,无法达到全局最优。因此,采用探测、通信、控制独立设计的模式,一方面控制指令会因缺少信息而受到限制,另一方面探测系统与通信系统之间会因缺少反馈机制,限制水下网络系统性能的整体性提升。综上,有必要建立水下探测、通信、控制联合设计框架(图8),最大限度地把水下信息优势转化为决策优势,实现水下网络监测性能的整体性提升。
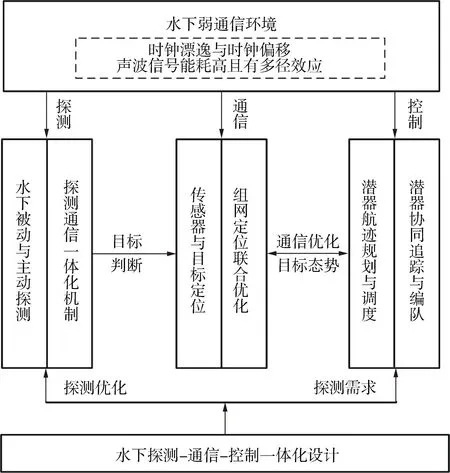
图8 水下信息物理系统探测、通信、控制内部关联Fig.8 Internal relationship of detection, communication and control in underwater cyber physical system
在作者前期工作[100-103]中,将水声信道模型引入到追踪控制中,提出了信息无处不在的潜器航迹规划策略,同时工作[104]将水声通信与潜器远程控制结合,设计并实现了水下遥操作协同控制。上述工作,对水下通信-控制进行了前期探索,但是还没有完全实现水下探测-通信-控制一体化。如何揭示三者间关联并突破技术瓶颈,也是未来研究重点。
6 结束语
定位对水下目标监测至关重要,而控制又密切影响着定位的精度。为此本文介绍了水下网络系统的内涵,概述了水下网络定位技术与协同控制技术,在此基础上讨论了定位与控制联合设计,并对未来研究方向进行了思考与展望,可供后续定位-控制一体化设计研究参考。
