基于模糊PI和线性自抗扰的下垂控制研究
2023-12-30施昕昕伦靖怡
施昕昕, 伦靖怡
(南京工程学院 自动化学院,江苏 南京 211167)
0 引 言
逆变器是微电网中分布式微电源[1]与公共电网并网的重要连接装置,应用下垂控制的逆变器可以使微电网在并网和离网两种状态平滑切换,但是在切换负载的时候会存在电压频率难以较好稳定的问题。
目前对于下垂控制的研究主要在于分布式电源的功率均衡问题以及电压频率稳定问题。文献[2]将模糊技术运用到风光储直流微电网下垂控制策略中,有效地减小了母线电压的波动。文献[3]在三相电压源型逆变器下垂控制基础上提出一种并网预同步的控制方法,解决了模式切换时电压功率波动问题。文献[4]在低压微电网下垂控制中引入了虚拟阻抗和模糊比例积分微分(proportional integral derivative,PID)的控制策略,解决了微电网在孤岛运行时出现电压和频率的震荡问题。文献[5]提出一种双馈异步风力发电机(doubly fed induction generator,DFIG)虚拟惯量与下垂控制相结合的微电网调频优化策略,有效提高了微电网频率稳定性。
传统下垂控制的电压电流双环控制使用负荷处电压作为外环,并使用比例积分(proportional integral,PI)控制器减小稳态误差。本文提出了改进的下垂控制策略,将模糊PI控制技术和线性自抗扰控制技术(linear active disturbance rejection control,LADRC)相结合引入下垂控制的电压外环中,通过MATLAB/Simulink建立仿真模型,并与普通PI和模糊PI控制相对比,验证了改进算法对电压和频率控制效果的优越性。
1 逆变器的传统下垂控制
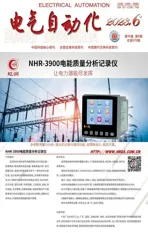
传统下垂控制是一种基于P-f、Q-U下垂特性曲线调节的控制方式。其中:P为微电网系统有功功率;Q为无功功率;f为系统频率;U为系统电压。曲线如图1所示。
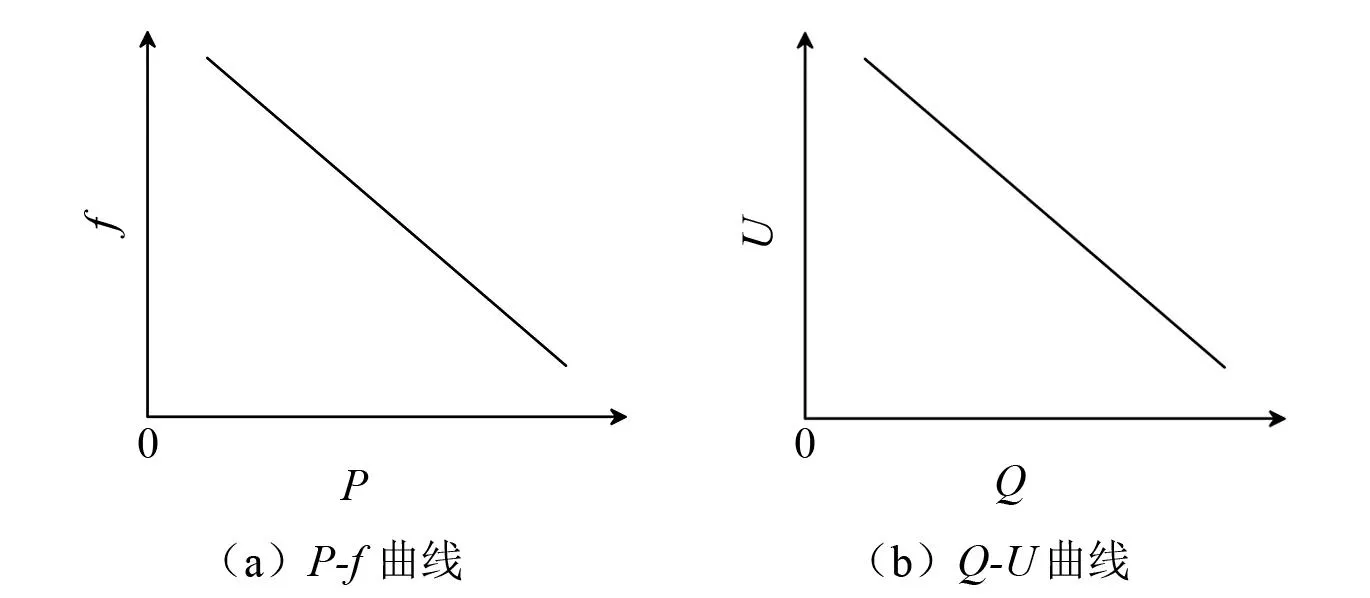
图1 P-f、Q-U下垂特性曲线
逆变器的下垂控制结构包括功率控制和电压电流双闭环控制。本文重点改进电压电流双闭环的电压外环部分,在基于两相坐标系dq坐标系[6]、传统下垂控制下d轴分量的电压电流双闭环控制结构如图2所示,q轴分量的结构与此相同。图2中:Udref为逆变器交流测输出的参考电压在d轴的分量;Ud为实际测得的输出电压;Icdref为电容电流的d轴参考值;Icd为实际电容电流;C为滤波模块的电容值。
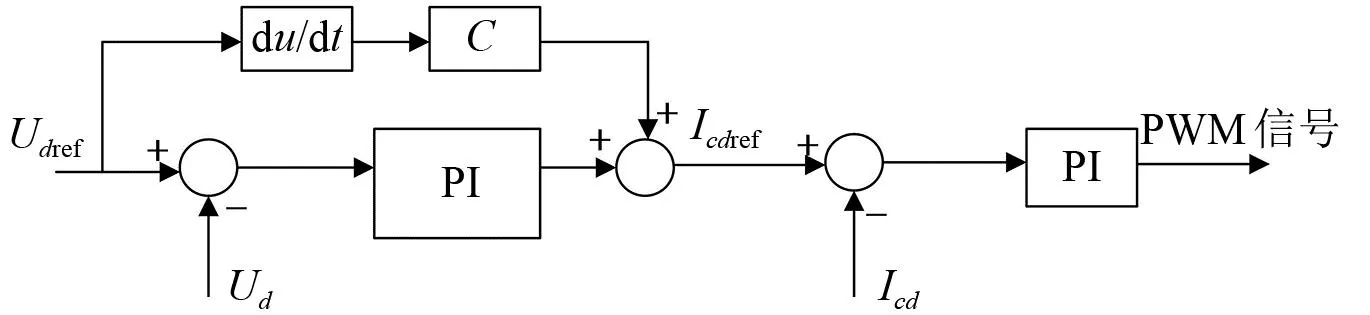
图2 d轴分量下的电压电流双闭环控制结构图
在MATLAB/Simulink中搭建仿真模型。仿真参数为:逆变器直流微电源电压为800 V,微电源经逆变模块和滤波模块后输出311 V交流电压为负载供电,额定频率为50 Hz。滤波器参数:电感L=0.6 mH,电容C=1 500 μF,电阻R=0.01 Ω。负载1:P1=8 kW,Q1=4 kvar。负载2:P2=2 kW,Q2=6 kvar。电压外环PI控制器参数:kvp=10,kvi=50。电流环PI控制器参数:kip=5。仿真验证通过投入或切除负载来验证控制器的效果。本文设置仿真时间为1 s,初始状态时逆变器同时带负载1和负载2运行,在0.3 ~0.6 s时,切除负载1运行,0.6~1 s期间再投入负载1。记录系统在有限仿真时间内系统公共连接点(point of common coupling,PCC)处的电压和频率的波形变化,PCC点参考电压有效值为220 V,参考频率50 Hz。
PI控制效果如图3所示。可见电压变化范围小于5%,而频率的变化范围小于1%,均在合理误差范围内。电压在0.3 ~0.6 s切除负载1后的母线电压有所上升,波动范围大概在0.5 V,频率由50.15 Hz增加到50.19 Hz,波动0.04 Hz。在0.6 s又重新投入负载1时,电压与频率的变化情况刚好与0.3~0.6 s的情况相反。并且在刚开始运行时,产生了震荡,但也很快稳定下来。
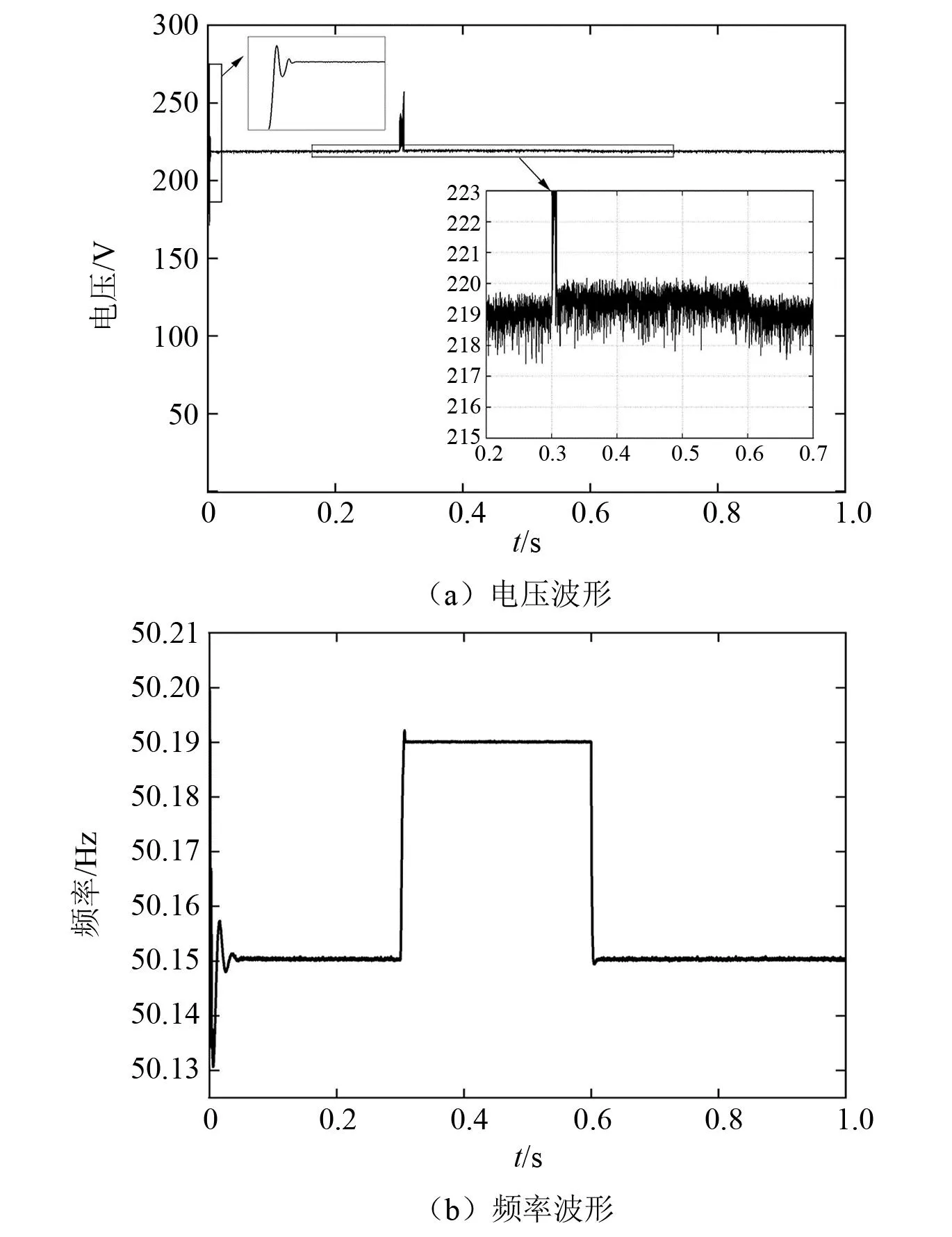
图3 PI控制下的电压和频率波形
2 基于模糊控制技术的逆变器下垂控制
模糊PI控制适用于复杂的非线性系统,其相较于普通PI控制器增加了模糊规则[7]。本部分将图2中电压外环的PI控制器替换为模糊PI控制器,设定模糊控制器的输入量为误差e=Uref-U与误差变化率ec=de/dt,通过模糊规则调节得到Δkp、Δki值,以此修正PI控制器的比例和积分系数。采用Mamdani模糊推理方法,可得到输出模糊值,再通过centriod重心法[8]解模糊,可得到准确的kp、ki值。
电压外环的模糊PI控制器参数:kvp=10,kvi=50,量化因子ke=0.001,kec=1×10-5,比例因子kpm=12,kim=0.000 1,电流环kip=5,其他参数不变。
模糊PI控制的效果如图4所示。开始运行后,电压的超调量比普通PI控制时的超调量更小,减少了振荡,输出更稳定。在t=0.3 s 切换负载时,电压波形变化相较于普通PI控制小一些,抗扰动性更强,稳态值更接近220 V,更准确。模糊PI与普通PI对频率的控制效果差不多,优化效果不显著,总体来说,模糊PI的控制效果优于普通PI。
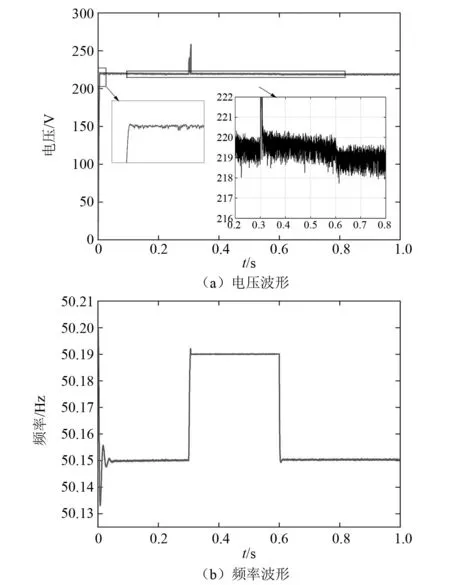
图4 模糊PI控制下的电压和频率波形
3 基于模糊PI和线性自抗扰技术的逆变器 下垂控制
自抗扰控制器由微分跟踪器(tracking differentiator,TD)、非线性PID和扩张状态观测器(extended state observer,ESO)三部分组成。传统模糊PI在PI的基础上进行上下参数调动,调节范围有限[9]。本文提出一种将模糊PI控制算法与线性自抗扰技术相结合的改进算法,并应用到逆变器下垂控制的电压外环中,外环通过下垂控制产生内环电压参考值,再通过内环的电压电流控制达到最终控制[10]。
3.1 线性自抗扰控制器设计
本节设计的控制器结构包含跟踪微分器和扩张状态控制器等。微分跟踪器的作用是对于输入量进行平滑处理,其常用形式为:
(1)
式中:v(k)为输入信号;h为积分步长;h0为滤波因子;r为输入信号。扩张状态观测器可以估计各个状态量的值并在反馈中对其进行补偿,其一般形式如式(2)所示。
(2)
式中:fal(·)为一种非光滑函数;u为控制量;b为常系数;β1、β2、β3为状态观测器的参数;δ为fal函数的线性区间宽度;z1、z2为y的状态估计量;z3为总干扰估计信号。
传统一阶LADRC控制器结构图如图5所示。图5中:K为控制器参数;Gp为被控对象;z1、z3分别为系统输出和总扰动的估计值;b为系统增益。
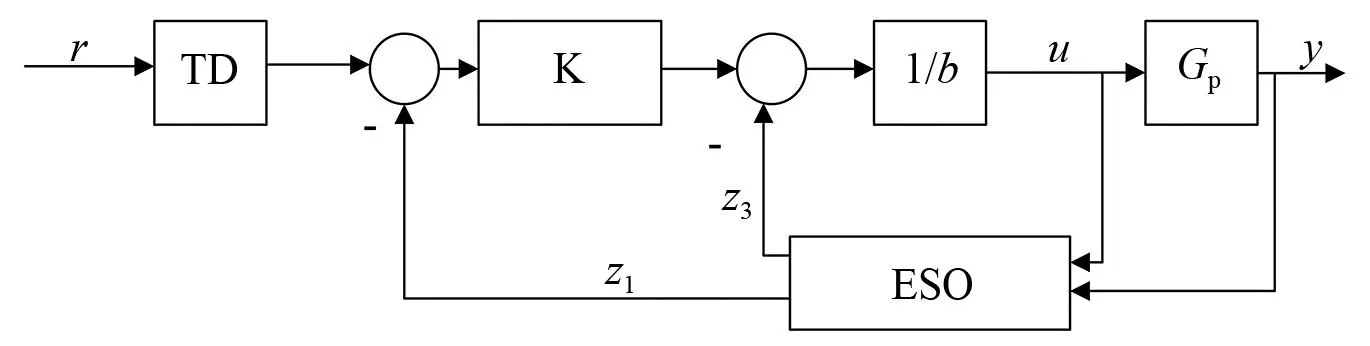
图5 一阶线性自抗扰控制结构图
本文提出将模糊PI控制和线性自抗扰技术相结合的改进算法,用模糊PI替换传统线性自抗扰结构中的K,改进后的算法结构如图6所示。将两者改进后的算法应用到逆变器下垂控制中的电压外环中,观察它的控制效果。
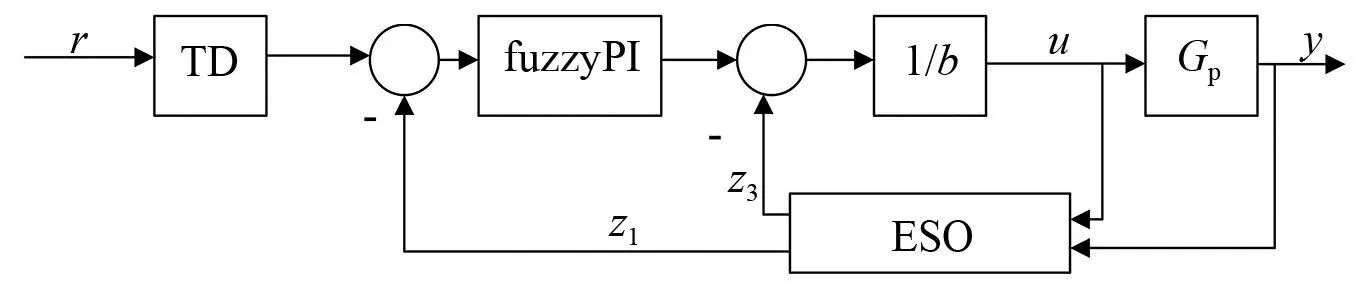
图6 模糊PI和线性自抗扰技术控制结构图
3.2 仿真分析
改进LADRC控制器中TD参数:h=0.01;r=20;h0=1。ESO参数:β1=200,β2=100,β3=100,δ=0.002 5,b=10。模糊PI控制器的仿真参数电压环:kvp=250,kvi=1 000;量化因子ke=0.001,kec=1×10-5;比例因子kpm=100,kim=50;电流环kip=5,其他参数不变。
由于模糊PI的控制效果比普通PI控制效果好,本部分将改进的控制器与模糊PI控制器的效果作对比。曲线1为模糊PI控制下的波形,曲线2为改进控制下的波形,电压对比波形如图7(a)所示,0.2~0.7 s的曲线放大图如图7(b)所示。可以看出,控制下的电压十分平稳,近乎一条直线,几乎无较明显的波动,抗扰动性能相较于其他两种控制器效果最好,稳态值更接近220 V,准确性更加优越。频率波形如图7(c)所示,改进控制下的频率波形变化小于0.02 Hz,更接近参考值50 Hz,准确性最高,变化也最小,抗扰动性最好。经过仿真对比,可以明显看出应用模糊PI控制和线性自抗扰技术相结合的优越性。
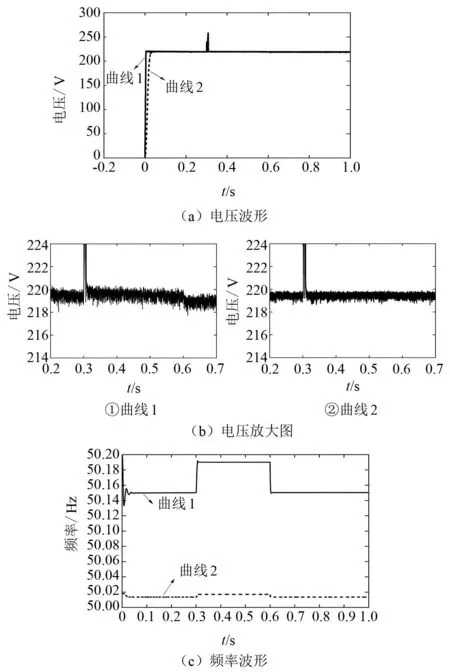
图7 控制器效果对比图
4 结束语
本文将模糊PI和LADRC相结合的改进控制算法引入逆变器的下垂控制的电压外环中。仿真对比结果表明:与PI控制以及模糊PI控制相比,应用模糊PI控制和LADRC相结合的控制策略对于切换过程中电压频率的稳定有显著的优化作用,对于设定值的跟踪性能最好。该控制策略在切换过程中能有效地减缓电压和频率的暂态振荡,较好地实现平滑切换。改进后的控制策略可以有效稳定微电网的电压和频率,给用户带来更好的用电质量。