信控交叉口行人过街冲突严重程度评价模型
2023-12-28张文会徐海彬周舸温文
张文会,徐海彬,周舸,温文
(东北林业大学,土木与交通学院,哈尔滨 150040)
0 引言
交叉口是城市道路网络的组成部分,也是人车交通冲突的高发区。虽然交叉口信号设施和标志标线完备,但随着城市道路交叉口人车通行数量不断增加,仍存在右转车辆、直行车辆与行人之间交通事故不断发生[1]在交叉口人车冲突中,不同交通行为导致的风险程度存在差异,深入分析行人过街冲突严重程度和致因,对于降低交叉口人车事故、提升交叉口安全管理水平具有重要的现实意义。
目前,对人车冲突等级划分的常用指标有后侵入时间(Post Encroachment Time,PET)[2]、安全减速度(Deceleration to Safety Time,DST)[3]、潜在碰撞能量(Potential Collision Energy,PCE)[4]、冲突速 度(Conflict Speed,CS)[5]等。Jiang 等[6]针对传统指标的局限性与适用性提出一种改进的交通冲突评价指标(Traffic Conflict Evaluation Indicators,TI)。通过对已有冲突点的多个指标进行算法聚类与迭代优化,可以有效区分不同类型的人车冲突严重程度[7]。鲍志强等[8]使用侵入时间(PET)与冲突时间(Time to Collision,TTC)作为仿真情况下人车冲突的指标。Zheng L.等[9]将TTC、PET、修改碰撞时间(Modified Time to Collision,MTTC)和避免碰撞的减速(Deceleration to Avoid Crash,DRAC)中任意两个指标进行组合,开发了双变量极值模型,根据模型预测与现实对比来验证交通事故碰撞严重程度。
为深入分析人车冲突行为,张洁等[10]围绕人、车、路、环境这4 个维度建立二元Logistic 模型,评价交通事故严重程度。彭勇等[11]通过Pearson相关性筛选14 个解释变量,建立回归模型获得影响人车冲突严重程度的显著性指标。马丹等[12]通过筛选行人不良过街行为的影响因素,建立二元Logistic 模型确定改善行人过街行为的措施。Layegh M.等[13]使用元胞自动机模型对交叉口人车冲突行为进行仿真,经过回归分析得到行人年龄段对人车冲突程度有显著影响。Kumar A.等[14]将人车冲突按严重程度分为4个等级,讨论行人冒险程度对冲突程度的影响。Zhang等[15]基于建立的人车冲突有序概率模型,分析车道数量与人车冲突的关联。Benlagha 等[16]利用统计与计量经济学方法检测交通事故大样本发现,性别对于交通事故严重程度有着显著影响。
综合以上研究工作发现,虽然针对交叉口人车冲突严重程度判别已有一定的研究基础,多选用PET、TTC 和DST 等为指标,结合数据挖掘算法深度分析关联因素。但已有研究中对交叉口人车冲突严重程度的解释变量存在不足,导致模型精度不够、研究结果的解释能力有限。此外,解释变量较为单一,且分类多为二分类。
因此,本文考虑到行人作为交通参与者的弱势群体,车辆在冲突区域的平均速度对人车冲突程度存在着显著影响,故引入冲突区域平均速度(Conflict Zone Vehicle Speed,CVS),结合传统冲突指标后侵入时间(PET)与冲突点距离(Potential Collision Distance,PCD)作为冲突严重程度评价指标,通过K-means聚类算法将人车冲突严重程度分成3类。考虑自变量相关性与因变量间的联系,以更综合的方式输入特征间的复杂关系,建立多元有序Logistic回归模型,引入充足的解释变量,有助于提供深入和全面的信息以提高模型的解释能力。
1 交叉口交通调查与数据分析
1.1 方案设计
本文选取哈尔滨市城市道路中3 处行人过街流量较大的交叉口作为调查地点,分别为幸福路—乐园街交叉口、哈平路—三大动力路交叉口、西大直街—汉阳街交叉口。利用DJI MINI3 PRO 无人机高空拍摄与地面拍摄双机位采集视频,共收集到3 h视频作为调查样本,如图1所示。
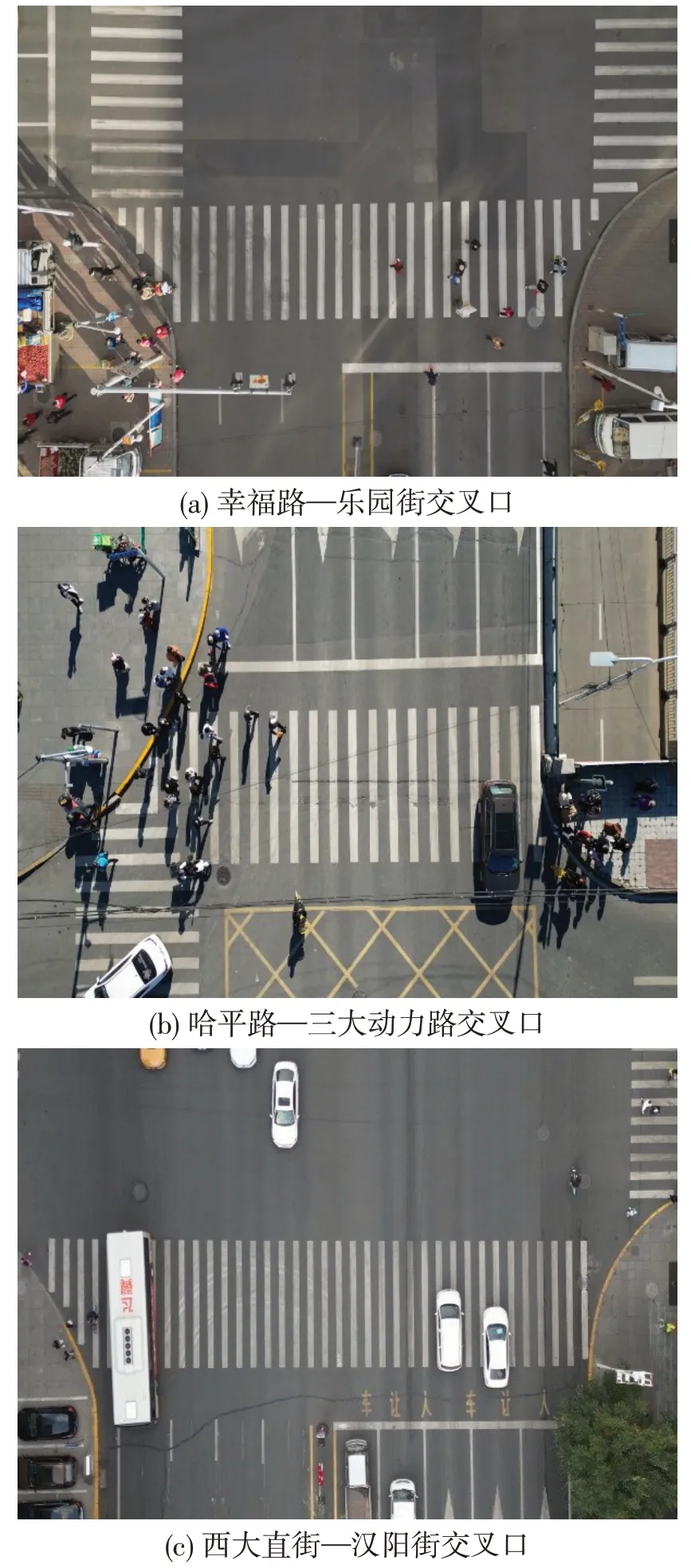
图1 调查路口实拍图Fig.1 Real time photo of survey intersection
首先利用Tracker软件解析轨迹得到人车冲突数据,使用K-means聚类算法将冲突点按照严重程度划分为3个等级,综合考虑人、车、路等多个变量建立多元有序Logistic 模型,具体实验流程如图2所示。

图2 实验流程图Fig.2 Experimental flowchart
1.2 变量描述
首先,基于人工观测和Tracker 软件解析处理航拍视频,剔除异常数据后获得423组有效冲突样本。其次,为保证风险分类精度,将城市道路交叉口行人过街场景包含的多种类型信息,以多类风险指标作为输入集。其中,一级变量按照人、车、路等因素划分为道路交通特征、车辆交通特征、行人交通特征这3 个特征变量。结合各变量特点与观测实际情况,对各一级变量细化。最后,根据变量类型将二级变量划分为离散变量、连续变量、分类变量,具体如表1所示。
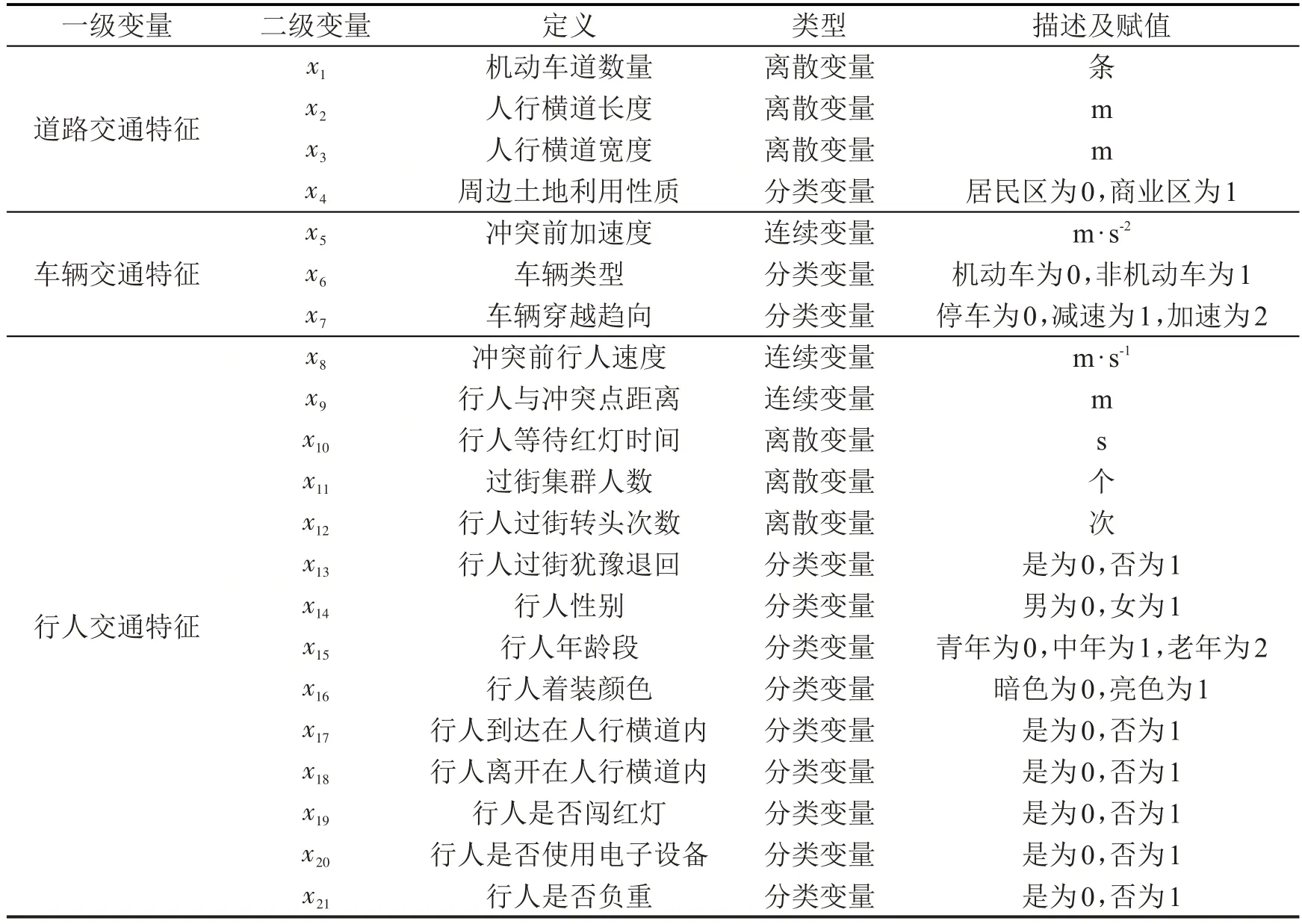
表1 变量描述Table 1 Variable description
1.3 冲突点空间分布
为了获得行人与机动车、非机动车冲突空间分布特征,将3个交叉口人车冲突点分别映射到人行横道,如图3 所示,图中散点代表人车冲突点。由此可见,冲突点的空间分布具有一定的规律,人行横道中部的冲突点通常出现在行人二次过街或行人闯红灯的情况下;幸福路和西大直街交叉口的冲突点主要集中在车辆出口道一侧的人行横道;哈平路交叉口不含出口道,该路段的人车冲突主要由行人与右转车辆的冲突引起,因此冲突点多集中在右转车道前的人行横道上。

图3 人车冲突位置分布散点图Fig.3 Scatter plot of conflict location distribution between people and vehicles
2 冲突严重程度聚类评价
2.1 评价指标
对于行人、非机动车与机动车冲突严重程度分析,除了采用后侵入时间(PET)、潜在碰撞距离(PCD)作为人车冲突评价指标,本文还引入冲突区域车速(CVS)评价冲突严重程度。
(1)后侵入时间PET
PET是指行人、非机动车或机动车先离开冲突点后,第2 位道路使用者到达冲突点区域的时间,其值TPET越小,表示冲突风险越高。PET被认为是最佳测量方法,可以较为客观地评价冲突严重程度。
式中:TPET为后侵入时间计算值(s);T1为第1 位道路使用者进入冲突点的时间(s);T2为第2位道路使用者进入冲突点的时间(s)。
(2)潜在碰撞距离PCD
PCD 表示行人与机动车或非机动车之间一方到达冲突点时,另一方与冲突点的距离,即其值LPCD越小,两者空间上越接近,行人风险越高。
(3)冲突区域车速CVS
CVS 表示机动车或非机动车的车身在穿过冲突区域时的平均速度,表征机动车或非机动车对行人潜在冲突严重程度。其值VCVS越大,行人风险越高。CVS中冲突区域示意图如图4所示。
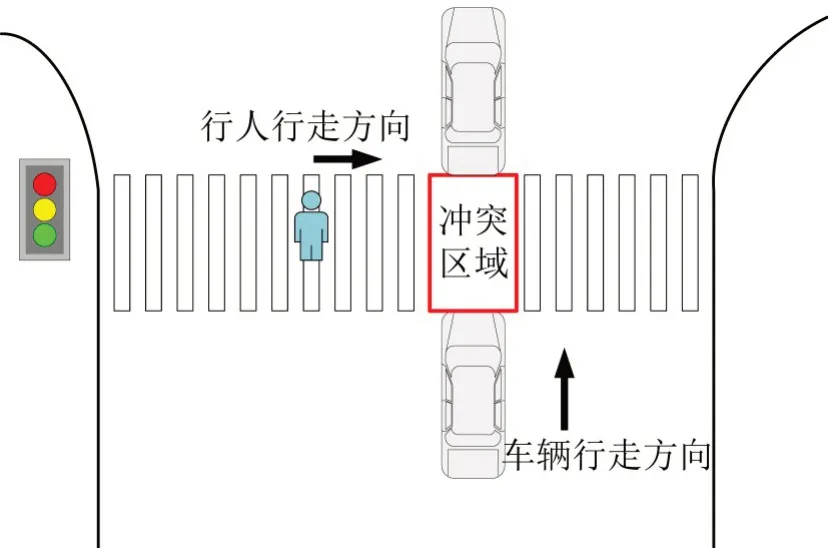
图4 冲突区域示意图Fig.4 CVS schematic diagram
式中:VCVS为机动车或非机动车的安全减速度(m·s-2);L1为机动车或非机动车车身的长度(m);L2为冲突区域的长度(m);t2-t1为机动车或非机动车车头抵达冲突区域时间t1到车尾离开冲突区域时间t2的差值(s)。
2.2 基于K-means聚类算法量化风险等级
为了量化交通冲突,本文基于PET、PCD、CVS指标建立冲突样本数据库,通过K-means聚类算法量化人车冲突等级,将冲突等级分为3类。
建立以PET、PCD和CVS为3个指标的三维坐标系,利用SPSS数理统计软件进行算法迭代,迭代13 次后,聚类中心收敛。聚类结果如图5 所示,图中越靠近坐标原点的点代表人车冲突程度越严重。冲突程度严重的冲突点相对密集,比重也较高。
按照聚类结果,将人车冲突分为严重冲突、一般冲突和轻微冲突这3个等级。在SPSS软件中输入模型的初始聚类中心,迭代后的聚类中心坐标结果如表2所示。
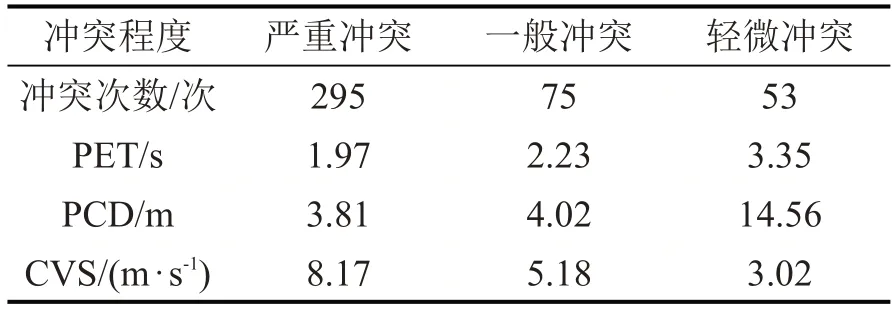
表2 聚类变量描述Table 2 Cluster variable description
3 多元有序Logistic回归模型
本文自变量包括分类变量、离散变量、连续变量,因变量为人车冲突严重程度等级,为有序多分类变量,适合采用多元有序Logistic 回归模型分析各变量对冲突严重程度的影响。
3.1 Logistic模型
设M为因变量,Mj为因变量下的某一等级,自变量记为X=(x1,x2,…,xn),即
式中:P为某一种冲突程度发生的概率;Y为因变量;j为第j个观测值;B0为回归截距;Bj为自变量xj的回归系数。
3.2 Pearson相关性分析
Pearson 相关性分析是一种常用的统计方法,用于评估两个连续变量之间的线性相关性。
式中:r为相关系数,取值在[-1,1]之间;x和y分别为两个变量的取值;mx和my分别为两个变量的平均值。
首先,利用Origin 软件中Correlation Plot 插件对解释变量进行相关性分析。如图6所示,x1与x2表现为强相关(相关系数为0.978),x1与x3表现为强相关(相关系数为0.865),x3与x4表现为强相关(相关系数为0.863),在0.01 水平上显著,因此剔除x2与x3变量。此时,其余相关系数均小于0.5,可以进行回归分析。
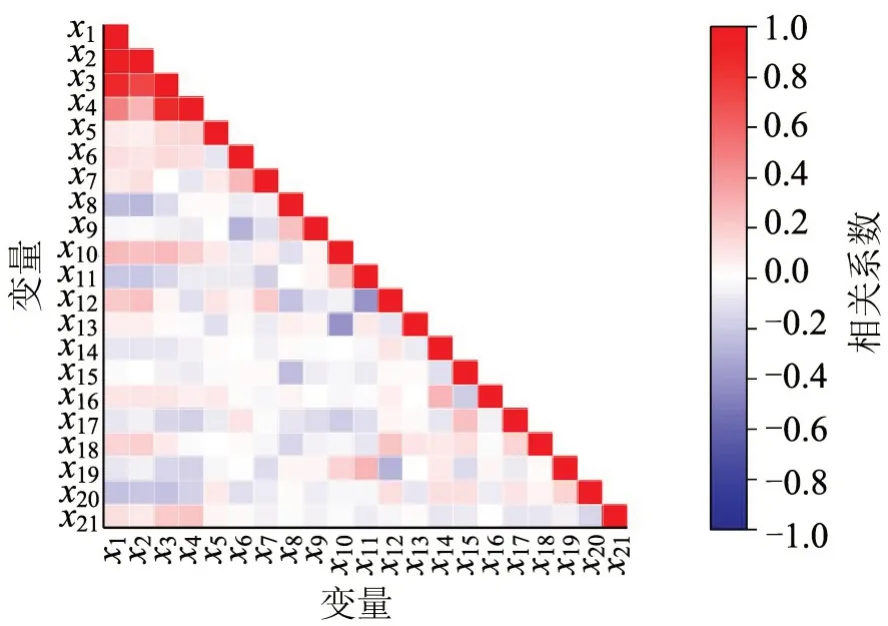
图6 Pearson相关性分析图Fig.6 Pearson correlation analysis chart
3.3 Logistic模型结果
本文所建立的多元有序Logistic模型经过平行线检验后,其显著性为0.861。说明本文建立的多元有序Logistic 模型具有统计学意义,平行线检验参数如表3所示。

表3 模型平行线检验Table 3 Model parallel line inspection
注:b表示在最大步骤对分次数后无法进一步增加对数似然值;c表示卡方统计量的计算基于广义模型最后一次迭代得到的对数似然值。
在统计学中,Wald 检验是一种常用的假设检验方法,用于评估模型参数的显著性。Wald 检验的基本原理为
式中:W为Wald统计量;θ为参数的估计值;θ0为原假设下的参数;SE(θ)为参数的标准差。模型输出参数如表4和表5所示。

表4 模型因变量参数估算结果Table 4 Model dependent variable parameter estimation results

表5 模型自变量参数估算结果Table 5 Estimation results of model independent variable parameters
根据表4的估算结果,将严重冲突、一般冲突、轻微冲突这3 种人车冲突程度的因变量进行两两对比。经过统计模型的分析,模型显著性小于0.001,说明模型中至少包含一种自变量对因变量的改变起着重要作用。
3.4 模型验证
本文使用实际类别的估计分类概率作为模型评价指标,并采用ROC 曲线将模型性能评价结果可视化。ROC 曲线通过依次尝试不同的决策阈值,计算得到一系列不同的真正例率(True Positive Rate)和假正例率(False Positive Rate),进而绘制出曲线。这样可以直观地展示模型在不同阈值下的性能表现。通过分析ROC曲线形状和曲线下面积(AUC),可以评估模型准确度和区分能力,有助于选择合适的决策阈值以平衡预测结果的准确性和召回率。
式中:PTPR为敏感度;PFPR为特异性;STP为真正例数;SFN为假负例数;SFP为假正例数;STN为真负例数。
基于多元有序Logistic 模型,进行人车冲突程度严重级别的区分,分类器的结果显示AUC 值为0.971,这说明该模型具有良好的正例和负例区分能力,表明该模型在冲突程度严重级别区分方面的显著能力,如图7所示。

图7 实际类别概率ROC曲线图Fig.7 Actual category probability receiver operating characteristic
3.5 结果讨论
通过分析表5 可知,在人、车、路这3 方面共计19个变量中,机动车道数量、车辆穿越趋势、行人与冲突点距离、行人等待红灯时间、行人年龄段、行人着装颜色、行人是否闯红灯这7个变量对冲突严重程度有显著影响,并在图8 中对3 种人车冲突程度下的上述7 个变量详细分布进行展示。通过分析图8,可以得出以下结果:
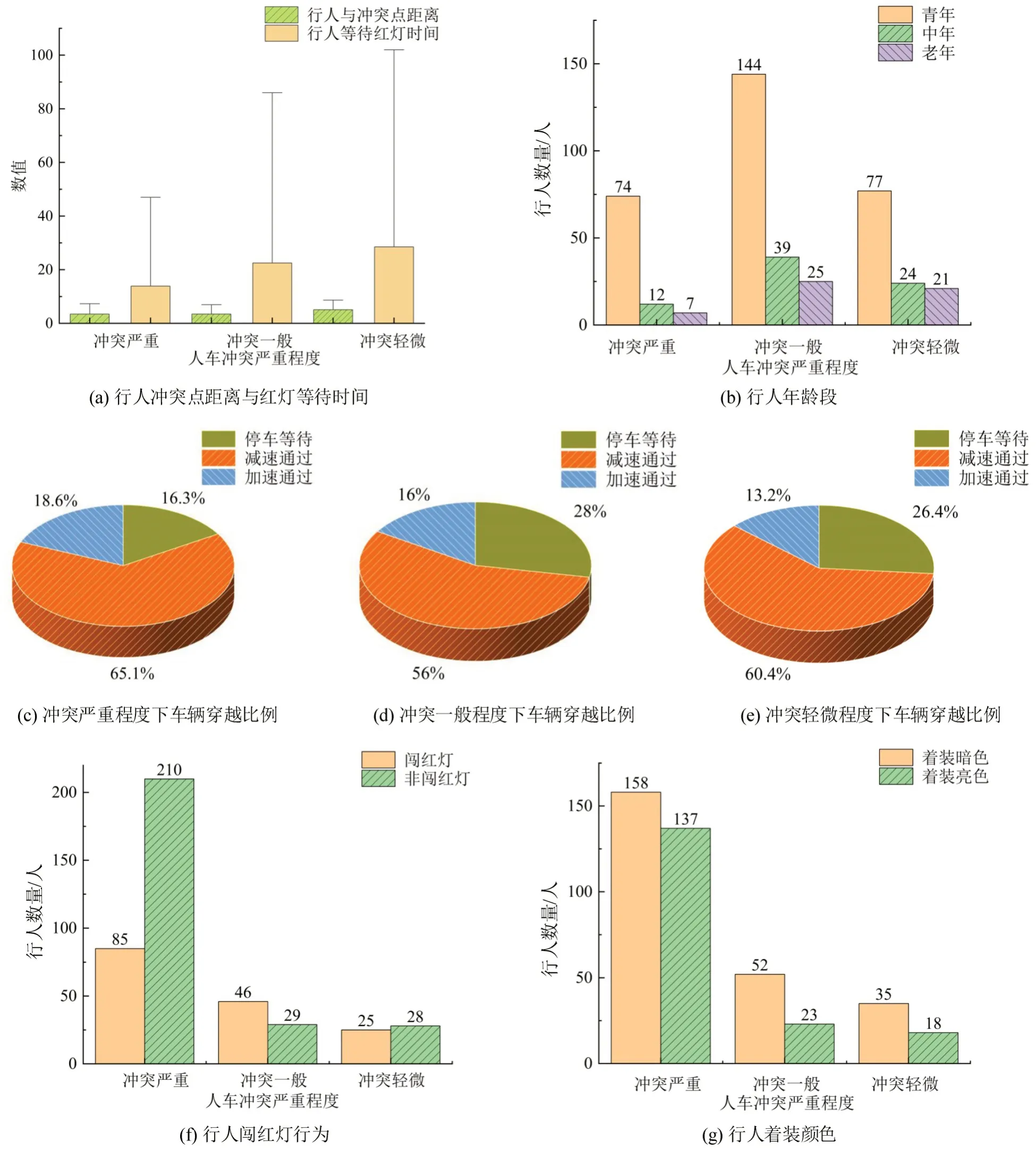
图8 不同冲突等级下解释变量分布图Fig.8 Distribution map of explanatory variables under different conflict levels
(1)图8(a)中,人车冲突程度由严重降至轻微的过程中,行人与冲突点的距离呈上升趋势,表示行人与冲突点距离更远。此外,行人等待红灯时间呈上升趋势,说明行人更加谨慎地等待红灯过马路。
(2)图8(c)中,人车冲突程度由严重降至轻微的过程中,车辆在冲突点的加速穿越行为占比呈下降趋势,表明车辆对冲突点的穿越行为更加稳定,减少了危险性。
(3)图8(f)中,人车冲突程度由严重降至轻微的过程中,行人闯红灯的数量也明显降低,意味着行人的交通规范性提高会降低过街风险。
结合表5进一步分析可得:
(1)在行人过街过程中,当机动车道数量增加时(0.29),人车冲突的严重程度会有所降低。具体表现为,由于车道数量较多,行人更加谨慎,并且不敢轻率地闯红灯,从而减少了潜在的人车碰撞风险。
(2)车辆选择停车让行(-4.22)和减速让行(-0.937)对于人车冲突的严重程度产生明显影响。具体表现为,车辆选择停车让行和减速让行时,能够将行人过街的风险降至最低。
(3) 行人与冲突点的距离(0.364)越远,也能使人车冲突的严重程度更轻微;行人等待红灯时间(0.012)对于人车冲突的严重程度也略有影响。较长等待时间的行人可以归类为等待绿灯的行人,这类行人在人车冲突方面的次数最少;不过,当考虑行人年龄段(-0.869)时,青年人和中年人由于生理机能等因素影响,过街警觉性高,导致人车冲突的严重程度最低;行人着装颜色(0.673)为亮色时,能够提高司机的警觉性,从而降低人车冲突的发生;不遵守交通规则闯红灯的行人(0.818)与车辆发生冲突的严重程度往往是严重级别。
4 结论
本文为量化城市信号交叉口下人车冲突的严重程度,并探究影响冲突程度的核心因素。选取哈尔滨市3个具有代表性的信号交叉口,通过无人机航拍采集与Tracker软件解析处理了人车冲突样本视频,提取冲突点与变量。得到具体结论如下:
(1) 使用人工观察与Tracker 软件解析无人机航拍视频后得到有效人车冲突点423个,将冲突点映射到人行横道平面图可以发现,在包含出口道的车道中,人车冲突点多集中在车辆出口道前的人行横道上;不含出口道的车道中,人车的冲突点大部分在右转车道前的人行横道上。
(2)采用后PET、PCD、CVS作为评价指标建立三维空间坐标系,利用K-means聚类算法经13次迭代后将人车冲突划分成3 个等级,其中,冲突严重类型295 次,冲突一般类型75 次,冲突轻微类型53次,CVS指标依次为8.17,5.18,3.02 m·s-1。
(3)统计人、车、路这3种属性下的21个解释变量,在Pearson 相关性分析下剔除了人行横道长度与人行横道宽度变量。基于多元Logistic回归模型的人车冲突严重程度模型,经过ROC曲线验证,模型对冲突严重级别的估计分类概率表现出优异的性能。得出机动车道数量增加(0.29)、车辆选择停车让行(-4.22)和减速让行(-0.937)、行人与冲突点的距离(0.364)、行人等待红灯时间(0.012)、行人年龄段(-0.869)、行人着装颜色(0.673)、闯红灯的行人(0.818)对人车冲突严重程度有着显著影响。
上述研究结果能够为行人过街安全的交通策略制定提供一定的参考价值。然而,在本文的研究过程中仅考虑了人车单次冲突情况,并且在聚类指标与解释变量选取方面可能存在一些不足之处。未来,在深入研究行人过街安全方面,仍需要进一步探索更精细的研究方法。
