面向拒止环境的无人机集群数据链网络拓扑优化策略研究
2023-12-22张超琦
张超琦,迟 凯
面向拒止环境的无人机集群数据链网络拓扑优化策略研究
张超琦,迟 凯
(中国电子科技集团公司第二十研究所,西安 710068)
针对现有无人机集群在卫导和通信拒止环境下,由于网络连通性降效导致任务遂行能力严重降级的问题,分析了国内外基于数据链网络降低拒止环境影响的最新研究现状,提出了一种基于任务优先级的动态优化连接度拓扑自适应位置选择策略,实现多个无人机集群在拒止环境下通过大区域拓扑连接获取拒止区域外信息,从而降低或抵消拒止影响,有效提升了无人机集群生存能力和任务遂行能力。
集群数据链网络;自适应拓扑优化;拒止环境
0 引言
随着无人平台技术高速发展,无人机集群在军事领域作用愈发凸显,如俄乌冲突中,俄军在一次军事行动中,曾使用约20架“柳叶刀”3和从伊朗进口的“见证者”136自杀式无人机(巡飞弹),协同攻击了乌军第406旅第66炮兵营和8月刚从英国接收装备回国的乌军技术保障分队,成功摧毁了乌军的防控指挥所、警卫连连部和燃料库。通过数据链网络将多种功能不同的无人机联合合作,最大程度地发挥作战效能[1],形成体系对抗优势。
相较于有人平台,无人机集群具备多层次复杂防空系统且电磁域处于超负荷强对抗环境下的拒止环境区域时,由于其自身携带的导航定位以及与后方信息交互等通讯功能极易受到强烈干扰和多重诱骗,从而极大影响遂行任务能力。这时通过采用现有无人机集群网络拓扑优化管理中常用的功率控制技术手段、信道分配及骨干节点/休眠等技术手段,除了会对无人机自身能耗产生巨大消耗,增加被发现的风险外,也无法合理发挥无人机平台自身的能力优势。因此,在不断提升抗干扰波形设计的同时,通过可靠灵活的数据链网络技术降低拒止区域影响也越发成为提升无人机集群遂行任务能力的关键。其中,网络的高效拓扑控制依然是最有望的研究热点[2-3]。鉴于此,本文提出的一种基于任务优先级的动态优化连接度拓扑自适应位置选择策略,为无人机集群在强拒止环境下的可靠任务遂行提供了一种思路和方法。
1 研究现状
军用方面,随着美国的战略重点由反恐向大国竞争转变,美军正积极推进第三次抵消战略,倡导应用无人系统、人机协同、人工智能等颠覆性技术,应对以弹道/巡航导弹、一体化防空系统、先进战斗机以及各型舰艇为代表的由一大批先进装备组成的区域性强国的反介入/区域拒止(Anti-Access /Area-Denial,A2/AD)战场的威胁。
但由于各无人机自身携带的电子设备较多,无人机及其与指挥控制中心的通信主要依赖于通信电台的联络,通过无线通信进而实现侦察、监视等情报信息和任务规划、决策等指控信息的传输。这就要求其通信网络和通信链路具有较强的抗干扰能力,以满足实际作战的需求。但实际作战应用中,无人机一旦遭受敌方的强电子干扰,极易出现信息传输错误甚至通信中断问题,致使无人机无法正常完成作战任务,甚至出现失控、坠毁和被俘获等严重问题[4]。
鉴于此,美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)的战术技术办公室(Tactical Technology Office,TTO)启动了名为拒止环境协同作战(Collaborative Operations in Denied Environment,CODE)的项目。该项目旨在研发先进的自主协同算法和监督控制技术以增强无人机(该项目无人机包括巡航导弹、诱饵无人机及其他无人机系统)在拒止环境的作战能力[5]。通过CODE项目的研究,使美军无人机集群能够适应并应对通信带宽受到限制或通信中断情况的发生,帮助其在受到突发威胁导致部分无人机处于敌方通信和全球定位系统(Global Positioning System,GPS)拒止环境下时,可以通过协同自主的通信技术将情况及时告知友方无人机,并可通过安全区域的无人机以中继的方式将操作员最新的命令传送给拒止环境下的无人机集群,从而有效避免了无人机操作员与无人机之间失去联系致使无人机无法正常完成作战任务等情况的发生。
2019年2月,在美国陆军尤马试验场,6架装有传感器阵列的RQ-23“虎鲨”无人机以及14架虚拟RQ-23“虎鲨”无人机举行了系列试验。试验无人机一开始通过与任务指挥官的互动执行任务,在双方之间通信降级直至被拒止后,它们仍能自主协同导航、搜索、定位并打击了受模拟一体化防空系统保护的预定及临时出现的目标。该试验验证了CODE无人机在通信降级或被拒止环境中适应和响应意外威胁的能力。
其后续启动的“小精灵”项目(Gremlin),可视为CODE项目的延伸与强化,可在电子干扰、通信能力削弱和其他困难作战条件下,完成无人机集群对敌的侦察监视及打击任务[6-7]。
民用方面,柯林斯宇航公司为异构网络提出了一种被称为韧性自治组网(Radio Access Network,RAN)的框架架构,该架构将异构组网的问题空间划分为多个能力层,该框架通过利用从数据流中获取的信息来训练并推断出的学习技术和启发方法,监控底层服务的运行状态,以选择并构建最优和韧性拓扑结构以供数据传输。卓翼智能科技有限公司下属的飞思实验室在无人机集群组网与协同方面,成功实现最大30架无人机集群飞行控制,通过其分布式控制方案,可实现机间星形、网状和链式等不同的网络拓扑组网方式,实现去中心化,并且当任意一架飞机脱离集群后,区域无人机可快速形成新的网络拓扑链接,具备一定抗毁能力。
另外,在无人机集群间数据通信传输中所遇到的易受干扰、稳定性差和实时性能低下的问题,国内外不少公司有的通过将Turbo迭代处理技术应用于接收机中的解码译码角度,实现了接收系统解调、均衡与译码的联合优化[8]。有的公司从扩频角度研究了基于变换域通信(Transform Domain Communication,TDC)的无人机数据链抗干扰技术,并在抗窄带干扰方面效果显著[9]。有的从隐蔽通信的角度来考虑提升机间信息的传输安全性[10],还有的从波形及链路路由选择等方向提出关于如何提高无人机集群间的数据链通信可靠性方面的研究。
从以上研究现状可以看出,民用领域对于无人机集群数据链网络拒止环境下的通信研究还不够全面,并鲜有涉及大规模集群网络拓扑优化方面的研究,至于涉及到复杂动态战场环境下的无人机集群组网敏捷性和可重构性等的相关技术研究[11]也少之又少。
2 拓扑优化策略
网络拓扑是指网络中所有节点及链路所形成的网络结构。无人机集群网络的拓扑控制就是在满足集群连通度前提下,通过功率控制或者骨干节点/休眠选择等技术,构建必要的通信链路,用于形成一个优化的网络结构[12]。
无人机集群在遂行任务时,往往由于电磁环境恶劣或者恶意干扰而无法依赖基础设施(如卫星)进行连通性保持。这种情况下,集群易产生网裂问题,即在拓扑结构上分解为多个独立的子网,由于无法保持连通,严重影响集群协作效能,最终导致任务降效。因此,考虑不依赖基础设施的集群网络连通性优化,对任务区域的无人机集群进行动态拓扑优化控制以保证网络的连通质量,尤其是末端集群与后方操作人员保持连通,能够有效抵消或降低网裂问题的影响,提升无人节点协同效能,最终提升任务的执行效果。
综上所述,为了保证在拒止区域内的无人机集群依然能够与视距之外的操作员建立通信,避免网裂情况的发生,可在仍处于安全区域内的集群节点中,依据通信需要选择一至多个节点充当拒止区域与操作员之间的中继节点,实现的多跳通信如图1所示。

图1 多跳通信
2.1 场景描述


图2 任务场景
图2中,操作员可以通过我方战术通信卫星向我方无人机集群子群和分别发送作战指令,但由于此时我方无人机集群子群进入到红色圆圈所包围的敌方高拒止区域,导致战术通信卫星无法将操作员的指令传达给无人机集群子群,同时由于子群之间的距离过大无法将消息从无人机集群子群通过一跳直接传送给子群。因此,通过在子群中间的子群区域中寻找合适位置放置一个或多个无人机,充当子群与子群的中继节点,继而实现战术卫星与子群的通信。
集群内每个无人机节点的通信半径R和感知半径一致,集合中的位置坐标为(X,Y),=1,2,…,。可将子群区域中继节点无人机的通信范围视为半径为R的圆形区域,故可将在子群区域中寻找合适位置放置无人机的问题转换成寻找在子群区域中,将中继节点放置在何处可保证子群和子群连通的前提下,所连节点中包含尽可能多的高权值节点的动态优化连接度拓扑自适应位置选择问题。
2.2 拓扑优化模型
设无人机节点Z位置坐标为Z=(X,Y),目标点T位置坐标为(X,Y),则节点与目标点间的距离如式(1)所示

无人机节点被目标点感知的概率(Z,T)为

为了在子群区域中得到中继节点能够放置的最优位置,不仅要能够同时与子群和子群建立通信关系,更重要的是,其能够与子群和子群中优先级权重较高的节点能连尽连,从而保证面向任务的高连通性与高效性。因此拓扑优化的目标函数Fits()可表示为

式中:weight表示与节点通信的节点自身的优先级权值;node_size表示中继节点可链接子群和子群中节点的最大数量;relay_node表示子群中节点个数。
子群和子群中的节点在式(3)中,每次只能与一个极点相链接,即在每一轮计算中,每一个与子群中1节点相链接过的节点在下一轮计算中将不能够与新的节点=2相链接。最终,得到子群中每个节点的函数value值,按照从大到小的顺序排列,其中函数value值最大的一个或前几个节点其对应的坐标位置(X,Y)即为符合基于任务优先级的动态优化连接度拓扑最优部署位置。
2.3 拓扑优化过程
为了得到最终优化后的拓扑位置,首先,需要一次找到待链接无人机集群子群中每两个集群中心连线的中点位置(CX,CY);然后,分别在这两个子群中寻找离中点最近的两个节点和;接着分别以和为圆心,R为半径画圆,得到两圆相交区域;最后在相交区域中利用迭代优化方法寻找到符合目标函数Fits()的可用来链接这两个集群子群的一个或多个最优部署位置position_best(X,Y)。
优化流程如图3所示。

图3 优化流程
3 仿真案例
在电脑上利用仿真软件进行算法验证。其中,无人机集群仿真场景分别由两个数量为25的无人节点构成,如图4所示,任务仿真场景区域为320×320 km的区域,节点通信距离约为30 km,蓝色星形图案为集群几何中心,红色实心图形是权值为10的高权值节点,黑色图形是权值为1的低权值节点,全网形成扁平化多跳网络结构。

图4 仿真场景
初始化任务场景后,随机选择左边红色圆圈包围的集群子群模拟进入到敌方强拒止环境中无法与外界通信的情况,而右边黑色圆圈包围的区域即为安全区域,红色拒止区域与黑色安全区域边界最近处距离为31 km。
随后,在子群和子群中寻找放置中继节点的合适位置。并进行三次仿真试验,第一次按照2.3节拓扑优化过程中寻找符合目标函数Fits()的拓扑最优位置节点,其结果如图5所示,后两次均不以目标函数Fits()作为指引,随机生成如图6和图7所示的结果。

图5 仿真结果1
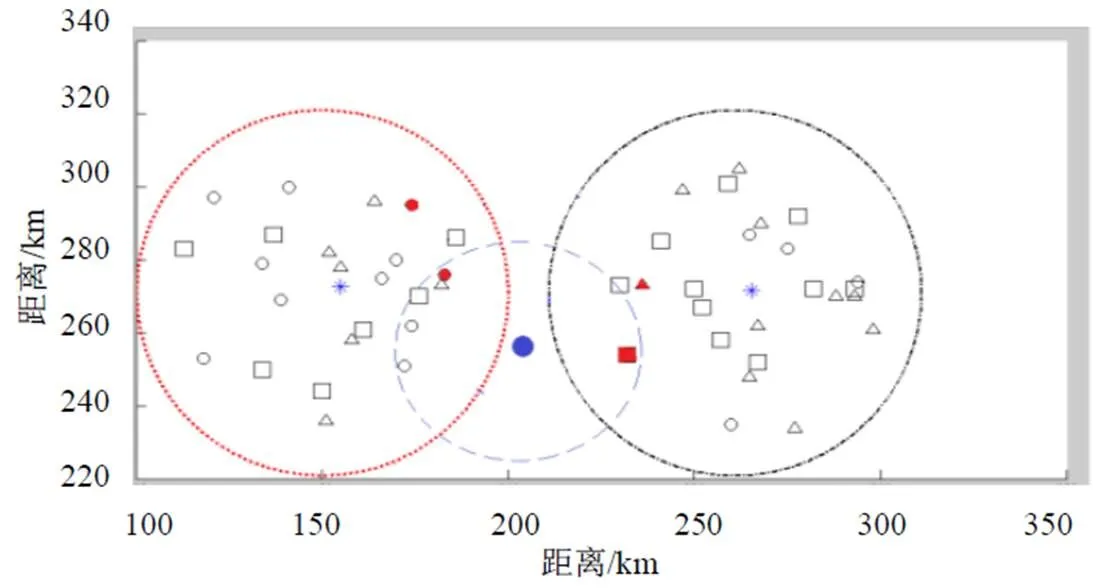
图6 仿真结果2

图7 仿真结果3
可以看出,根据Fits()函数,图5中继节点所包含子群和子群的高权值节点数量总共为3,其目标函数值为value=3×10+3=33;图6中继节点所包含子群和子群的高权值节点数量总共为2,其目标函数值为value=2×10+4=24;图7中继节点所包含子群和子群的高权值节点数量总共为1,其目标函数值为value=1×10+4=14。
通过对比可以发现,在采用基于任务优先级的动态优化连接度拓扑最优位置自适应放置策略后,所放置的中继节点位置最为合理。
4 结语
无人机集群协同作战具有变革突防战术战法,牵引集群装备发展的重要意义,对抗环境下集群作战,对网络拓扑适变性提出了很高的要求,在保证网络可靠性与鲁棒性的同时,要能够根据网络态势和遂行任务情况,灵活自适应重构。基于数据链网络进行大规模无人机集群拓扑控制,能够有效提升动态场景下网络效能,支撑未来无人机集群体系对抗。
本研究设计的面向无人机集群数据链网络拒止环境下拓扑优化策略,通过搭建仿真验证环境,在典型场景下对拓扑优化技术进行了验证。相关技术可为后续大规模无人机集群协同作战提供支撑。
[1] 崔朝阳,孙甲琦,徐松艳,等. 适用于集群无人机的自组网安全分簇算法[J]. 山东大学学报(理学版),2018,53(7):51-59.
[2] 张春侠,高洋,张烁,等. 飞行器协同自组网数据链信息集成设计要求[J]. 航天标准化,2021,183(1):1-5.
[3] 魏艺明,朱铁林,牛立新. 一种时分自组网无人机数据链的设计[J]. 电子世界,2021,611(5):172-173.
[4] 王桂胜,任清华,徐兵政,等. 无人机作战数据链面临的通信干扰问题研究[C]. 第二届中国空天安全会议论文集,2017.
[5] 李磊,王彤,蒋琪. 美国CODE项目推进分布式协同作战发展[J]. 无人系统技术,2018:59-66.
[6] 王祥科,刘志宏,丛一睿,等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报,2020,41(4):20-45.
[7] 刘宏波,孟进,赵奎. 蜂群无人机数据链自组网协议设计[J]. 火力与指挥控制,2018,43(9):163-168.
[8] 姚安,陈自力. 无人机数据链信道均衡算法仿真研究[J]. 计算机仿真, 2014,31(11):42-47.
[9] 韦乃棋,陈自力,朱安石,等. 基于TDC的无人机数据链抗干扰技术研究[J]. 测控技术,2013,32(3):124-127.
[10] 李曙光. 高速数据链隐蔽通信发展现状及其关键技术[J]. 现代导航,2015,10(5):461-464.
[11] 姜思晓,房红征. 数据链组网与数据传输仿真技术[J]. 计算机测量与控制,2016,24(6):278-281.
Research on Topology Optimization Strategy of Unmanned Cluster Data Link Network for Denial Environment
ZHANG Chaoqi, CHI Kai
Aiming at the problem of serious degradation of task execution ability due to network connectivity effect of existing UAV clusters in the environment where navigation and communication are denied, the latest research status at home and abroad is based on data link network to reduce the impact of denied environment, and a dynamic optimization connectivity topological adaptive location selection strategy is proposed based on task priority. In the denial environment, multiple UAV clusters can obtain information outside the denial area through large area topology connection, thereby reducing or counteracting the denial impact, and effectively improving the survivability and mission fulfillment ability of UAV clusters.
Cluster Data Link Network; Adaptive Topology Optimization; Denial Environment
TP393
A
1674-7976-(2023)-06-446-05
2023-08-28。
张超琦(1996.01—),陕西西安人,硕士,主要研究方向为数据链网络。
