机器视觉在舰船综合保障中的应用研究
2023-12-22仲维彬
仲维彬
机器视觉在舰船综合保障中的应用研究
仲维彬
(海军装备部)
介绍了国外先进舰船综合保障方面的发展现状,从应用需求出发,分析了机器视觉技术在物资分拣、智能运输和智能监控等场景中的应用,探究了上述场景中提高舰船综合保障能力有关机器视觉的关键技术。机器视觉在提高舰船综合保障的自动化水平、作业效率以及节省人力需求等方面将发挥重要作用。
舰船综合保障;机器视觉;物资转运;智能监控
0 引言
舰船综合保障能力直接关系到武器装备系统性能的发挥和全生命周期费用的高低,优化舰船的综合保障能力至关重要。舰船的综合保障包括物资、设备和技术资料保障等方面,而物资保障是确保舰船持续运行和战斗力保持的关键。目前舰船的物资转运和舰面异常状态监控人工参与较多,一定程度上影响了舰船作业效率,因此探寻一些高效能的、自动化的物资转运与智能监控方式尤为重要。随着机器视觉在民用物流仓储、自动导航和安全监控等领域的成熟应用,将机器视觉技术引入舰船综合保障中可显著提高自动化和智能化水平,进而支撑作战效能的提高。
1 舰船综合保障系统现状分析
美国尼米兹级航母的结构布置和物资补给、搬运、存储流程均为早期设计,例如在弹药装上舰载机之前,由于航空弹药储存在航母底层甲板的不同弹药舱内,需要舰员将武器移动到搬运车辆上,并在航母内部经过几次横向和纵向的移动,送达不同的中转区和装配区[1]。这些“陈旧”流程使得尼米兹级航母的物资搬运严重依赖人力,准备时间较长,影响舰载机出动效率。
福特级航母的物资转运系统则进行了大量的改进,主要是在物资搬运与存取系统的结构、布置方面采用了很多自动化技术,提高了空间利用率和调度效率,采用的先进设计包括自动仓储与提取系统、万向自动搬运车等。
福特级航母的自动仓储与提取系统采用了选择性卸载技术,如图1所示,该技术使得货舱、贮藏室、弹药库的存储和卸载实现自动化作业。系统工作时,在计算机端由人工识别和定位物资及其摆放位置,通过可编程控制算法和外部传感器控制无人升降机到达指定位置,并利用传输系统将物资传输到无人升降机和甲板上,实现了批量物资转运和指定物资的选择性卸载,也将其存储到航母货舱的其他位置[2],该系统有效节省了人力、提升了物资的存取效率。

图1 福特级航母自动仓储与提取系统
在手推车和铲车基础上,福特级航母上采用了具有自动控制和导航系统的万向自动搬运车[3],如图2所示,该自动搬运车体积小、重量轻、负载能力强,可以利用车辆万向轮朝着任意方向移动,在航母狭窄空间内作业非常便利。运行过程中,在舰员的遥控下自动驾驶往返货舱和甲板之间,控制搬运车沿着准确路径行驶,大幅度提高物资搬运效率,但整个过程中需要人员监视和控制搬运车的运行状态,自动化程度有待进一步提高。

图2 万向自动搬运车
上述应用中,舰船综合保障中的物资存取和转运系统,采用了一定的自动化设备,提升了舰船物资装卸和搬运的效率。然而整个运输过程中存在人员参与多、智能化水平和作业效率低等问题,无法满足未来无人化作战的需要。
2 机器视觉技术在舰船综合保障中的应用分析
为满足未来无人化作战对舰船综合保障体系发展的新要求,在现有舰船综合保障设施的基础上引入机器视觉技术,有望进一步提高舰船物资转运以及舰面监控视频中的智能化和自动化水平[4-5]。机器视觉在舰船保障的应用如图3所示,可通过视觉传感器采集图像,利用图像处理模块对获取的图像进行智能识别与分析计算,根据具体需求实现物品码/存储位置识别、导航定位、障碍物感知和舰面状态识别等能力,为物资转运过程中的自动分拣、智能运输以及智能监控等应用提供支撑。

图3 机器视觉在舰船综合保障中的应用
3 关键技术需求分析
3.1 自动分拣识别
在舰船货舱中,物资按照类别存储在多列排布货架的不同区域,人工存放存在物资类别与存储位置误识别、作业效率低等问题。为此,采用机器视觉技术,建立基于语义分割和深度学习的物品码与货舱存储位置识别模型,对物资类别与存储位置进行精准识别。物资自动分拣识别流程如图4所示,通过BiSeNet、SeaFormer等模型对视觉传感器采集的图像进行语义分割,定位物品码,采用ResNet、DenseNet等深度学习模型对物品码进行识别[6-7],获得物资信息;可采用相同的算法识别货舱存储位置,将识别结果与物资信息进行关联,锁定存储位置。基于此,将有效降低误识别概率,提升自动分拣系统的作业效率。

图4 物资自动分拣识别流程
3.2 智能运输
为实现舰船物资在货舱与甲板间的无人化智能运输,使用具有自主导航定位和障碍感知的机器视觉技术辅助无人转运车辆进行自主形势。
3.2.1 循迹式定位与导航
循迹式定位与导航是通过识别地面合作标识的方式实时计算位姿,引导车辆沿着预先规划的路线自动行驶。循迹式定位与导航流程如图5所示,对视觉传感器采集的地面引导线等合作标识进行智能识别,并采用PNP(Perspective-N-Points)、POSIT等算法计算车辆当前位置,直至引导车辆到达终点,实现转运车辆的循迹式定位与导航[8]。

图5 循迹式定位与导航流程
3.2.2 同步定位与建图
与循迹式导引需要专用的合作标识的导航定位方式不同,基于视觉特征的同步定位与建图(Simultaneous Localization and Mapping,SLAM)是一种基于周围环境特征的自主定位算法,该算法对连续捕获的场景图像进行特征检测和提取,通过特征匹配构建帧与帧之间的共视关系,对特征进行优化,在构建周围环境三维地图的同时准确定位车辆在地图中的位置,提高转运车辆在行驶途中的环境感知与自主定位能力。
采用双目相机的SLAM技术更容易获得周围的环境信息,其算法框图如图6所示。通过双目相机采集环境图像,基于视觉里程计机理提取图像中的特征进行特征提取与匹配以及位姿估算,并根据接收的位姿估算结果和回环检测信息进行后端非线性优化,得到周围环境三维地图的同时获取定位结果[9]。
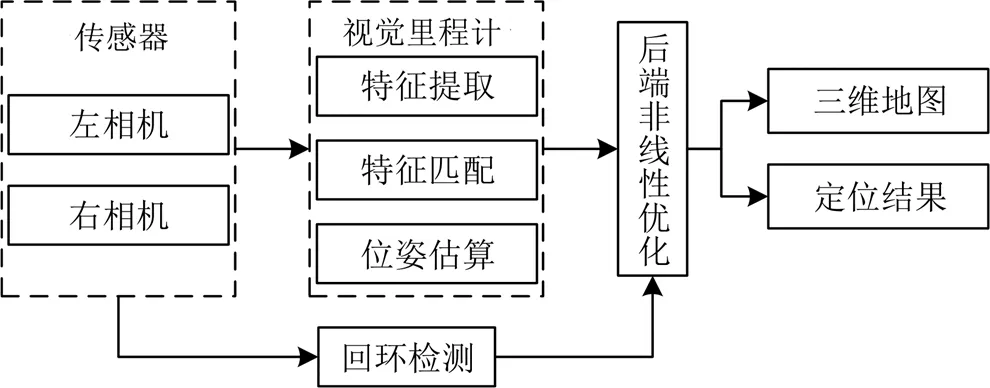
图6 双目视觉SLAM定位算法
3.2.3 障碍物感知
物资运输过程中可能存在其他车辆、舰员以及某些固定设备等障碍物,影响转运车辆的正常行驶,因此需要提高转运车辆对障碍物的感知能力。采用双目视觉三角测距法对获取的图像进行智能分析计算,得到前方物体的深度信息,实现车辆行进前方障碍物的智能感知。
双目视觉三角测距原理如图7所示。其中,l和r分别为左右相机的成像平面;l和r分别表示左右相机的像素坐标;l和r分别为左右相机的焦距;为2个相机光心的距离。
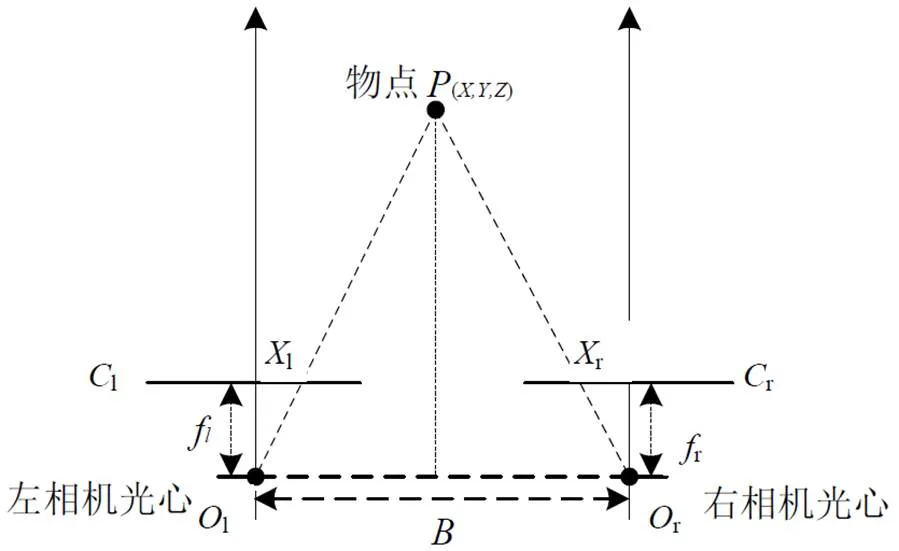
图7 双目视觉三角测距原理
在平行双目视觉系统中,相机视场内的任意物点在左右相机中分别形成对应的像点,首先计算左右相机采集图像对应点横坐标之间差值的绝对值,然后根据物点和左右相机之间的几何关系计算出物点与光心的距离[10],即为前方物体的深度信息,根据物体与车辆的相对位置、车辆行进方向等关系判断是否为障碍物。
机器视觉感知障碍物具有实时性好、精确度高、自主性强等优点,另外可将超声波、激光雷达等手段与机器视觉结合使用提供多重感知能力,通过异构冗余设计实现无盲区覆盖,提高障碍感知的可靠性,确保车辆行进安全。
3.3 智能监控
舰船运行过程当中可能会出现转运车辆异常、物资掉落、舰面人员跌倒甚至是飞机侧翻等状况,因此需要构建基于机器视觉、人工智能的舰面状态智能监控系统。在着舰区、起飞区、停靠区、舰桥等重要和易发生安全事故的区域安装分布式监控终端设备,在服务器端对分布式监控设备所采集的视频进行实时智能图像综合处理,实现从仅具备录制功能的传统监控到实时异常提示的智能化监控转变。舰面状态智能监控流程如图8所示,首先通过HsNet、CifarNet等深度学习模型对车辆异常、物资掉落、人员跌倒和飞机侧翻等不同状态的样本数据进行训练,获得舰面状态识别模型,通过该模型识别输入的实时监控视频,对异常状态进行智能识别和告警提示,实现对舰面状态全方位、高可靠性的智能监控。

图8 舰面状态智能监控流程
4 结语
本文在分析现有舰船自动化物资保障体系的基础上,从适应未来无人化作战的应用需求出发,分析了机器视觉技术在物资分拣、智能运输与智能监控场景中的应用,探究了物品码/存储位置识别、循迹式定位与导航、同步定位与建图、障碍物感知、舰面异常状态识别等关键技术。机器视觉技术的应用,将进一步提高舰船物资保障与舰面状态监控的智能化和自动化水平,有效提升作业效率,优化舰船作战效能。
[1] 志昂. 美国“福特”级航母先进物流系统[J]. 现代舰船,2012,12:32-35.
[2] 于瀛.“福特”级航母的设计及技术特点[J]. 现代舰船,2011,8:16-19.
[3] 希弦. 微观航母之弹药贮运(下)和物流系统的新技术[J]. 兵器知识,2016,9(19):76-79.
[4] 祝泓,张平. 舰船综合保障系统设计[J]. 中国工程科学,2015,17(5): 44-50.
[5] 孙光甦,原宗,关静. 舰船综合保障体系综述[J]. 中国舰船研究,2020,15(1):89-94.
[6] 王成军,韦志文,严晨. 基于机器视觉技术的分拣机器人研究综述[J]. 科学技术与工程,2022,22(3):893-902.
[7] 赵熠,邵春福,李霞. 基于图像处理技术的货运标签识别系统[J]. 设施与设备,2007,8:185-187.
[8] 张舒原,孙中. 视觉识别导引AGV系统的物流规划分析[J]. 物流技术与应用,2016,21(4):130-135.
[9] 梁明亮,王云飞,张凯. 基于双目视觉SLAM的室内机器人导航技术[J]. 科学技术与创新,2022,17(4):185-188.
[10] 郭兆明,周庆华,曾小为. 基于双目视觉的缺陷药片检测[J]. 计算机与现代化,2021,11(5): 56-60.
Research on Application of Machine Vision in Shipboard Comprehensive Support
ZHONG Weibin
An overview of the current state of development of advanced foreign naval vessels in the realm of comprehensive logistical support is provided. Starting from practical applications, it delves into the utilization of machine vision technology in scenarios such as material sorting, intelligent transportation and intelligent monitoring. The critical technologies associated with machine vision that enhance the comprehensive logistical support capabilities of naval vessels in these scenarios are investigated. Machine vision is poised to play a significant role in elevating the automation level, operational efficiency, and reducing the human resource requirements in enhancing naval vessel comprehensive logistical support.
Shipboard Comprehensive Support; Machine Vision; Materials Transportation; Intelligent Monitoring
TN953
A
1674-7976-(2023)-06-401-04
2023-10-30。
仲维彬((1977.05—),江苏海安人,硕士,高级工程师,主要研究方向为信息装备技术研究。
