利用卫星测高数据反演全球海底地形研究进展
2023-12-14郭金运张忠辉
蒋 涛,姜 笑,,郭金运,张忠辉
1.中国测绘科学研究院,北京 100830
2.山东科技大学测绘与空间信息学院,山东 青岛 266590
3.自然资源部第一大地测量队,西安 710054
0 引言
海洋约占地球总面积的71%,全球海底地形数据是重要的地球科学基础数据,在经济建设、国际政治、科学研究、自然灾害防治、生态环境保护和军事方面具有重要价值[1]。海底通信电缆铺设、航海路线规划、深海资源勘探、海洋领土划界、海底板块运动以及海平面与全球气候变化研究、地震预测预报、海啸监测预警、海洋生态环境保护修复和潜艇导航等都需要精准的海底地形数据。
鉴于构建精细海底地形的重要作用,日本基金会(Nippon Foundation)和海洋总测深图(GEBCO)项目组于2016年启动了“2030年海底计划”,旨在到2030年之前完成全球海底地图绘制,获得最终的GEBCO系列全球海底地形图。截至2023年5月,15"的船测水深数据覆盖率已达到24.9%[2-3],即海洋地区仍有3/4的地形有待绘制。然而传统船基测量不仅要消耗大量的人力、物力、财力,且具有远海地区船只不易抵达的局限性。因此,在实现船测水深数据全覆盖之前,如何利用其他技术构建精细全球海底地形模型是现阶段需要解决的关键问题。
当前能够短时间内实现大面积海底地形探测的技术主要包括激光雷达测深技术、遥感影像反演技术和卫星测高数据反演技术[4]。由于激光雷达测深只能应用在浅海区域[5-6],而遥感影像反演受雷达和光谱仪参数及海洋环境影响较大、普适性差[7-8],因此不能满足全球尺度海底地形反演的需求。而卫星测高数据反演技术由于受环境条件影响较小且具有能够获取高精度、大尺度、均匀覆盖数据的优点特性,被广泛应用于全球海底地形反演,目前已成为构建全球海底地形模型的主要技术手段[9-11]。
自1969年大地测量学者Kaula首次提出卫星测高概念以来,基于卫星测高的研究也随之展开。在早期,受测高数据稀疏分布的影响,仅可以通过沿轨一维观测获得的大地水准面的起伏特征来分析海底地形特征[12-13]。后来,得益于Geosat和ERS-1卫星测高任务数据的丰富, Sandwell等[14-15]利用这些数据反演重力异常,并通过其与海底地形在频域内中短波长的近线性关系来估计海底地形。该研究不仅填补了没有船基测量数据地区的空白,而且使得海底地形的反演精度和特征提取能力得到显著提升。自此,基于卫星测高获取的重力异常数据开始被广泛应用于海底地形反演[16-21]。
随着Jason系列、海洋二号(HY-2)系列和新型测高任务Cryosat-2、SARAL/Altika等多源卫星测高数据的积累和测量精度的改善,全球海洋重力场模型的精度和空间分辨率得到了显著提高,并进一步带动全球海底地形模型构建的发展。目前,由测高数据反演的海洋重力异常模型格网分辨率可达1′×1′、外符合精度优于2 mGal[22-24]。利用高精度、高分辨的海洋重力异常模型,在墨西哥湾、南大西洋和中国南海等海域甚至揭示了以往未曾探测到的海底构造[23-24]。国内外众多机构发布了基于重力异常反演的全球海底地形模型,例如S&S系列、DTU系列和武汉大学BAT_WHU2020等[25]。2000年,Wang[26]提出垂直重力梯度异常,可用于反演海底地形且具有在短波尺度上突显海底构造的潜力。因此,后有不少学者开展了利用垂直重力梯度异常反演海底地形方法的研究[27-28],并发布了基于垂直重力梯度异常数据构建的全球海底地形模型[29-30]或与重力异常数据联合反演模型[31]。2023年,Gevorgian等[32]利用高斯建模方法拟合海山形态,使用最新垂直重力梯度异常模型更新了全球海山目录,相比于之前发布的24 643座海山,又新确定了19 325座海山,证明了垂直重力梯度异常在探测海山方面的潜力。基于以上研究,本文将全球海底地形反演所需的卫星测高重力异常数据及垂直重力梯度异常数据统称为卫星测高重力数据。
本文首先介绍利用卫星测高数据反演海底地形的基本原理;第二部分介绍卫星测高技术的发展现状和主要测高模式与任务;第三部分介绍2种全球海洋重力场模型和3种经典海洋重力场反演方法;第四部分分析几种卫星测高重力数据反演海底地形方法的优缺点;最后提出全球海底地形高精度动态监测的构想,从卫星测高数据、船测水深数据和海底地形反演技术等方面开展了可行性分析。
1 卫星测高数据反演海底地形的基本原理
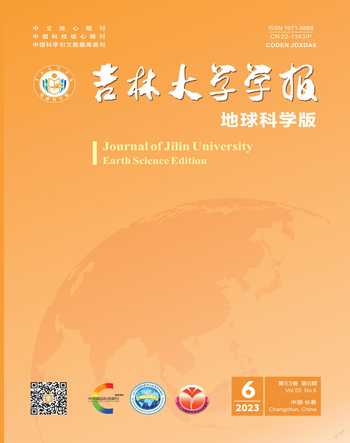
测高卫星利用电磁波信号与海面之间的准镜面反射作用来记录发射和接收雷达信号的往返时间,再结合已知信号传播速度来获取较高精度的测距信息R。实际应用中还需考虑潮汐、仪器误差、大气传播误差以及海洋环境误差等影响,详情可参考文献[33]。卫星测高基本原理如图1所示,测高卫星经过GPS卫星定轨获取相对于参考椭球面的高度为S,可得瞬时海面高。再结合动态海面地形的影响,可求得大地水准面高,进而基于沿轨大地水准面梯度可以解算出垂线偏差。由于动态海面地形难以获取,因此多采用稳态海面地形。
据文献[34]修编。
如何准确分离大地水准面高和海面地形一直是个难题。在早期卫星测高精度较低的情况下,大多忽略海面地形,直接将海面高看作大地水准面高。后来多用已有重力场模型计算大地水准面高模型,再通过平均海面高模型减去大地水准面高模型得到稳态海面地形。如此,通过新增测高数据将流程产品进行更新。例如,法国国家空间研究中心(Centre National d’Études Spatiales,CNES)发布了格网分辨率为7.5′×7.5′的全球稳态海面地形模型CNES_CLS18,该模型由GOCO05S大地水准面高模型和CNES_CLS15平均海面高模型计算获取[35]。
海洋大地水准面高和垂线偏差信息可以作为恢复海洋重力场的输入数据。恢复海洋重力场的方法主要有基于大地水准面高的逆Stokes公式、基于垂线偏差的Laplace方程和基于垂线偏差的逆Vening-Meinesz公式等,具体公式推导可参考文献[36]。
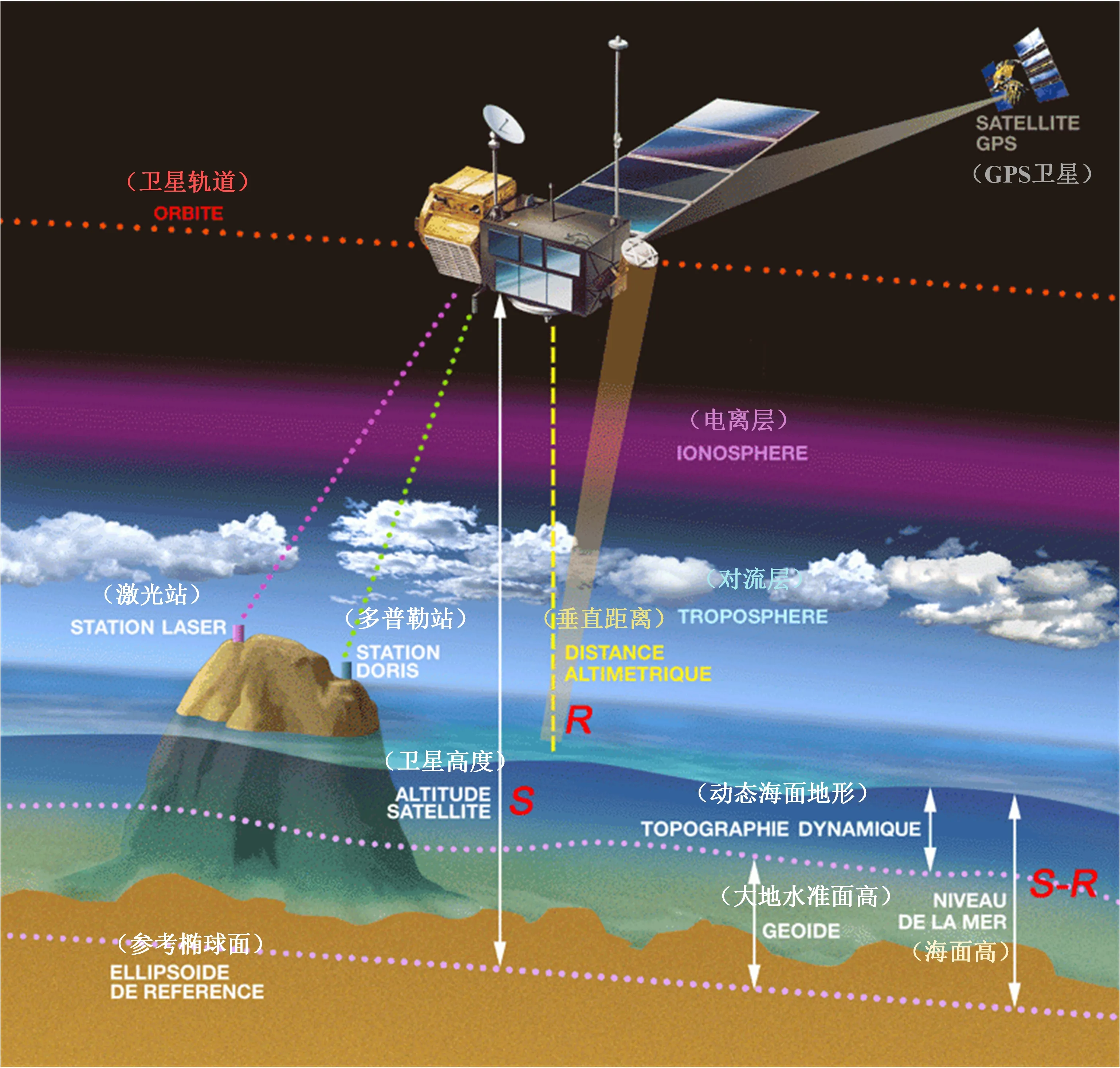
早在1876年,Siemens[37]设计了一款水深监测仪器,其思想就是通过监测局部地形变化导致的引力变化从而推测水深,这也是目前利用重力信息反演海底地形的主要思想。海水质量亏损是指海平面与海底地形之间的填充物由假设均质地壳转为实际海水时的质量亏损。海面重力信息受海水质量亏损、地壳密度分布不均匀、地壳以下质量的均衡补偿等因素影响。其中,由于海水质量亏损距离海面最近,使得海面观测到的重力变化主要来自于海水质量亏损[38]。在中短波段,海洋重力场与海底地形具有较高的相干性,从而在一定程度上可以反映出海底地形特征[14,39]。海底地形反演所需的海洋重力场主要是指引力位势能垂直方向一阶导数——重力异常和二阶导数——垂直重力梯度异常。图2分别展示了由美国斯克里普斯海洋研究所(Scripps Institution of Oceanography,SIO)发布的日本海域(132°E—136°E,36°N—40°N)的海底地形模型(topo_24.1)、重力异常模型(grav_32.1)及垂直重力梯度异常模型(curv_32.1)。由此可见,研究人员可以利用重力数据的此类特性,构建出适合实际数据处理的数学模型来反演实现海底地形。
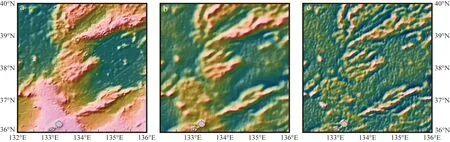
图2 日本海域的海底地形模型(a),重力异常模型(b)和 垂直重力梯度异常模型(c)
2 主要卫星测高模式与任务
为测试卫星高度计的设计参数,美国发射了第一颗测高实验卫星Skylab[40-41]。过去50 a间,国际上已成功发射20多颗测高卫星,这些卫星在大地测量学、海洋学和气象学等领域得到了广泛应用。如今,卫星高度计的主要测高模式有:脉冲有限模式、激光测高模式、合成孔径雷达模式(synthetic aperture radar mode,SARM)和合成孔径雷达干涉模式(synthetic aperture radar interferometric mode,SARInM)。表1列出了主要海洋卫星测高任务的执行信息。
表1 主要卫星测高任务
2.1 脉冲有限模式
Geos-3卫星是首个可进行有效测高的测高卫星,并采用脉冲有限模式测高。目前,全球大部分海洋地区测高数据的积累来源于脉冲有限模式测高。由于雷达波束脉冲会覆盖海面一定范围,通常用脉冲足迹来表示范围大小,脉冲足迹越小意味着测距精度越高。由于在典型海况条件下,即有效波高为2 m,采用脉冲有限模式,脉冲足迹直径一般为几千米,因此脉冲有限模式测高也称低分辨模式(low resolution mode,LRM)测高[42]。
2.2 激光测高模式
与其他模式测高的脉冲足迹相比,激光测高的脉冲足迹更小,直径已降低至米级水平。目前,主要执行海洋激光测高任务的是ICESat和ICESat-2卫星。ICESat卫星是由美国发射的世界上第一颗对地观测激光测高卫星,为极地地区提供了更多沿轨数据[43]。ICESat-2卫星是由欧空局(European Space Agency,ESA)发射的ICESat第二代激光测高任务卫星,搭载了先进的地形激光测高系统(ATLAS),相比于ICESat,增加了激光脉冲重复率,减小了测量间隔,能更好地测量崎岖地形[44-45]。
2.3 合成孔径雷达模式
CryoSat-2卫星首次成功采用SARM测高,提高了沿轨道方向的空间分辨率和卫星测高精度[46]。相比于LRM测高只利用了电磁波的频率和幅度信息,SARM测高还利用到了相位信息,因采用延迟多普勒补偿技术,也称为延迟多普勒测高[47]。利用多普勒频移技术,SARM测高的脉冲足迹直径减少到几百米,使测高数据分布可以更接近海岸线[48]。目前,Sentinel-3A和Sentinel-3B完全以SARM运行,未来计划发射的Sentinel-6A和Sentinel-6B预计同时进行LRM和SARM测高,便于直接和连续地将2种模式测量的瞬时海面高进行比较,从而提供向后兼容性[49]。
2.4 合成孔径雷达干涉模式
SARInM测高将传统的一维沿轨测高过渡到二维宽刈幅干涉测高,减少了卫星轨道间存在的大量数据空白,使得空间分辨率和时间分辨率得到了巨大的提升。因此,SARInM测高也称为宽刈幅干涉模式测高。目前,宽刈幅干涉模式测高已成为新一代测高任务的发展热点。中国载人航天工程于2016年9月发射的“天宫二号”搭载了三维成像微波高度计,这是国际上第一次实现宽刈幅海面高度测量并能进行三维成像的微波高度计。高度计幅宽提高到30 km,此成果验证了宽刈幅干涉在测量效率、测量精度和空间分辨率等方面的良好性能[50]。最新于2022年12月16日发射升空的SWOT(surface water and ocean topography)卫星,由美国宇航局(National Aeronautics and Space Administration,NASA)和法国CNES联合研制,且由加拿大航天局(Canadian Space Agency,CSA)和英国航天局(UK Space Agency,UKSA)协助。SWOT卫星设计搭载了新型Ka波段雷达干涉高度计(KaRIN),能够获取可达120 km幅宽的二维测高数据[51]。理论上,SWOT卫星能够获得网格分辨率为2 km×2 km的测高数据,具有提供高质量海洋重力场模型的潜在优势[52]。
3 卫星测高数据反演海洋重力场
目前,国际上较为知名的全球海洋重力场模型主要为丹麦科技大学(Technical University of Denmark,DTU)Andersen团队构建的DTU系列模型和美国SIO机构Sandwell团队构建的S&S系列模型。这两个团队一直致力于利用测高数据不断更新全球海洋重力场模型,通过对测高数据进行质量评定、低通滤波和波形重跟踪等系列处理,得到更为精确的沿轨海面高数据,从而构建更精确的海洋重力场模型[53]。
Andersen团队利用基于大地水准面高的逆Stokes方法来恢复海洋重力场[54]。Stokes公式由Stokes于1849年推导,该公式利用大地水准面上的重力异常计算大地水准面高[55],而利用大地水准面高反演重力异常则是Stokes公式的逆问题。计算大地水准面高时,需要从海面高观测值中扣除海面地形,因此首先要获得高精度稳态海面地形模型。目前,DTU系列公开版本于2017年更新至DTU17,并使用了新的潮汐模型 FES2014,处理和融合了更多CryoSat-2数据,提高了北极地区的模型精度[23]。
Sandwell团队利用基于垂线偏差的Laplace方程来反演海洋重力场,该方法不涉及复杂核函数计算且计算精度较高[14]。垂线偏差是海面高的一阶导数,可有效抑制径向轨道误差和海面地形等长波误差项,较好地保留了重力场高频成分[56]。早在1997年,Sandwell等[14]基于ERS-1数据和Geosat数据,首次反演了覆盖南北纬72°、分辨率为2′×2′的全球海洋重力异常模型,记为V7.2模型。2019年,Sandwell等[57]比较了Geosat、ERS-1、Jason-1、Jason-2、CryoSat-2和SARAL/AltiKa等6个测高卫星对海洋重力场模型的精度贡献,并应用于V28.1模型。随着卫星测高数据的积累、数据处理技术的改进,海洋重力场模型覆盖范围、精度和分辨率有了明显的改进,2022年已更新至V32.1版本。
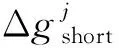
S&S和DTU系列全球海洋重力场模型所用的测高数据可参考文献[58],精度分析可参考文献[59]。图3展示了SIO发布的全球海洋重力异常模型grav_32.1。
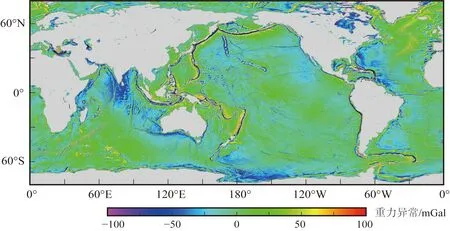
图3 全球海洋重力异常模型grav_32.1[14]
1998年,Hwang[60]将逆Vening-Meinesz公式转换成离散形式的数值积分,使用核函数推导了垂线偏差转换为重力异常和大地水准面高的频域表达式,构建了南海海域的重力异常模型,与船测重力数据的结果比较表明,模型的精度优于V7.2模型。由山东科技大学发布的全球海洋重力异常模型SDUST2021GRA也是采用逆Vening-Meinesz公式法构建[61]。逆Stokes公式和逆Vening-Meinesz公式反演重力异常都涉及核函数积分问题,而近计算点区域积分会导致核函数奇异的现象,被称为内圈带效应。后有学者提出使用估计内圈带效应、非奇异变换等方法来解决这一问题[62-63]。
除此之外,还有最小二乘配置法和Hotine积分法等方法。重力反演技术已较为成熟,目前的研究重点在于利用多源测高数据融合及波形信号重定等处理来提升数据质量和精度,从而改善重力场模型。
4 海底地形反演方法
利用卫星测高重力数据反演海底地形的经典方法主要有导纳函数法[64]、线性回归法(S&S法)[65]和重力地质法(gravity-geologic method,GGM)[66-68]等,该领域正呈现出向多源数据融合及人工智能等方向发展的态势。本节详细分析了3种经典方法的优缺点,回顾了其研究进展,还简要介绍了模拟退火和人工智能等最新优化算法。
4.1 导纳函数法
在频域内,海面重力场与海底地形之间的关系通常用转换函数来表示,转换函数也称为导纳函数[69]。1972年,Parker[70]利用快速傅里叶变换(fast fourier transform,FFT)推导出频域内密度变化界面起伏F[hn(r)]与重力异常F[Δg]之间的关系:
按《扬州鹅饲养技术规程》(DB32/T 1184—2008),采用自然光照,网上平养(试验前圈舍喷雾消毒)。整个试验期间,自由采食,统一供应清洁饮水。试验过程中,圈舍定期消毒,清理粪便。
(1)

式(1)用于地形正演重力场是容易实现的,然而由于级数的存在,加之高阶项影响相对较小,因此可以使用保留级数第一项的处理方式来进行反演。以重力异常为例,重力异常和海底地形之间的线性表达式为
ΔG(k)=Z(k)H(k)=2πGΔρe2πkdH(k)。
(2)
式中:ΔG(k)和H(k)分别为重力异常和水深的傅里叶变换;Z(k)为导纳函数,此时为未补偿导纳;e2πkd为向上延拓因子,表征了从海底地形到海平面的重力衰减。
Airy地壳均衡假说认为,地壳漂浮在地幔上达到了静力平衡状态,因此地球表面地形的高低起伏将会反映在莫霍面上。高于海面的地形会导致对应的地壳部分陷于地幔中形成莫霍面凹陷;低于海面的地形,即海底地形会导致对应位置的莫霍面突起,这也可以解释陆地高山区域重力异常为何为负值[72-73]。挠曲均衡作为Airy均衡的广义形式,综合考虑了岩石圈的弹性力,引进区域补偿代替局部补偿,将地形质量作为一种加在连续且有弹性的地壳层上的负荷,如图4所示。当在不同补偿模式下,导纳函数还有Airy补偿导纳和挠曲补偿导纳等,具体可参考文献[74-75]。
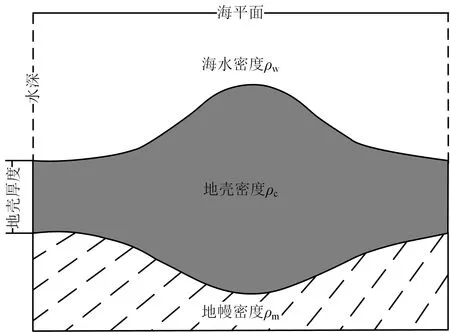
图4 地壳挠曲形变模型
地球物理参数的选取在导纳函数法的补偿模型中至为重要。针对海洋领域的地球物理参数已有许多学者进行研究。1983年,Dixon等[12]基于挠曲均衡补偿导纳函数研究了地壳密度、莫霍面深度和有效挠曲刚度对海深探测不同波段的影响。1987年,Baudry等[76]分析了海山形状、海山密度、地壳模型、有效弹性厚度和卫星轨迹与海山距离等物理参数对海底海山位置探测结果的影响。
后来,部分学者研究发现,相比于未补偿导纳函数模型,更为复杂的补偿导纳函数模型在精度方面的表现欠佳。2015年,欧阳明达等[77]探讨了未补偿导纳函数与挠曲导纳函数之间的区别并对两者的反演结果精度进行分析,结果表明补偿导纳函数模型精度略低于未补偿导纳模型精度。2019年,范雕等[74]对不同均衡补偿模式下的反演模型进行对比分析,认为未补偿导纳函数模型涉及的地球物理参数变化更小,因而优于补偿导纳函数模型,均衡补偿模型不适用于海洋区域。受限于当前地球物理参数精度和地壳均衡假说理论问题等因素,导纳函数法反演海底地形总体精度不高,仍有待发展。
4.2 线性回归法
1994年,Smith等[15]利用南半球海域的卫星测高重力异常数据开展了海底地形反演的研究。研究表明,由于海底地形频域内长波分量受地壳均衡作用补偿的影响,短波分量受向上延拓效应、观测噪声的影响,海底地形与向下延拓重力异常在一定波段内的相干性较强。因此,将该波段的向下延拓重力异常与海底地形之比定义成比例因子,根据不同地区的船测水深和沉积物厚度进行线性回归分析,得到更适用于估算海底地形的比例因子格网,该方法称为线性回归法,也称为S&S法。S&S法可在一定程度上利用船测水深数据作为先验信息,能巧妙地解决地球物理参数不易选取的问题。
2000年,Wang[26]指出垂直重力梯度异常数据可以削弱海底地形反演时地壳均衡、沉积层等因素的影响,且反演结果不直接依赖于重力异常。因此,后来也有学者使用S&S法利用垂直重力梯度异常或者联合重力异常和垂直重力梯度异常等数据进行海底地形反演研究[28,31,78-79]。
首先,对海底地形与重力数据进行相干性分析[78,80]。以重力异常为例,图5为日本海某研究区域内海底地形与重力异常的频域相干性示意图,使用相干性在0.5以上的波段进行线性回归分析效果较好。对频域内重力异常ΔG0(k)经过带通滤波器W(k)和向下延拓处理,获得与海底地形相干性更好的重力异常信号ΔG(k),表达式为
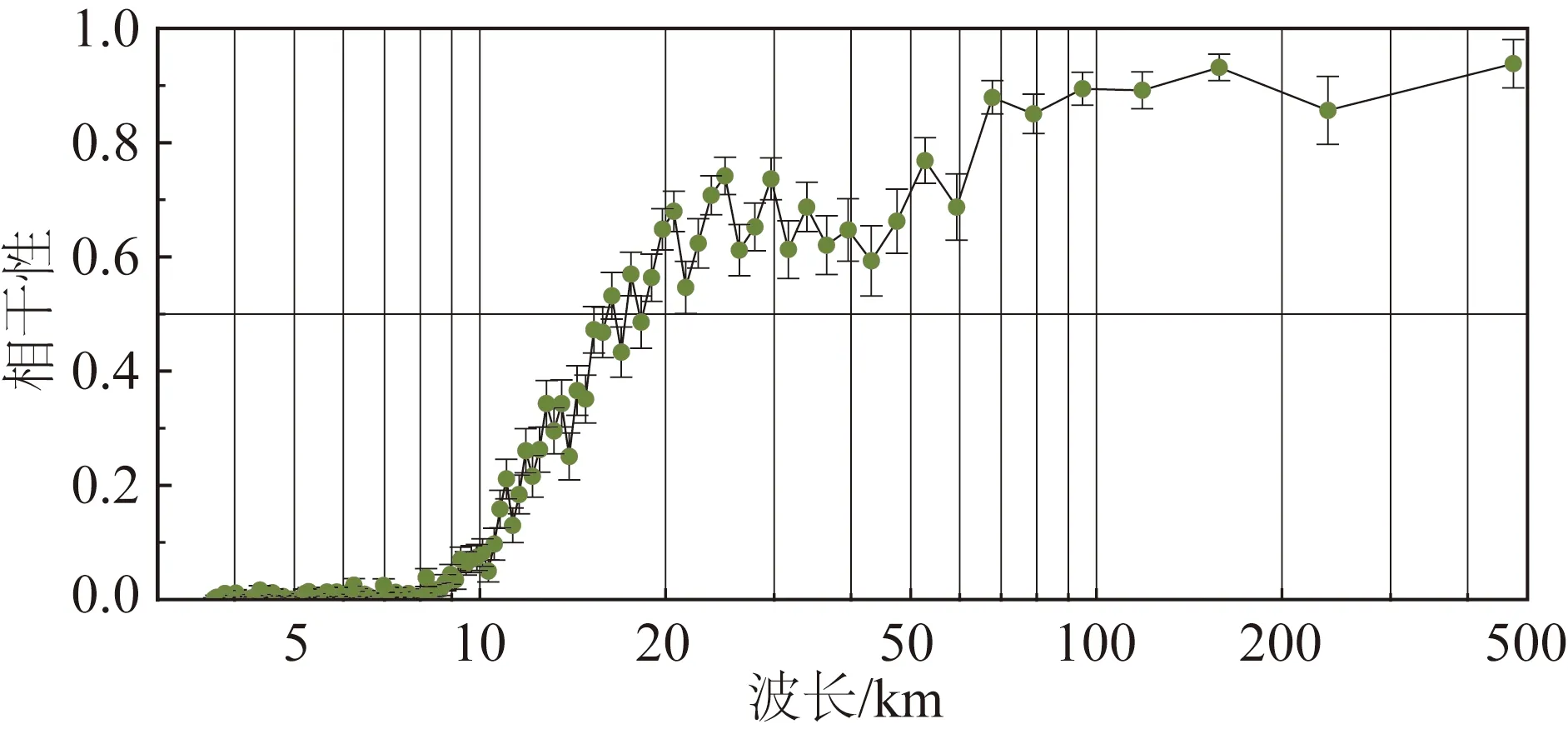
图5 海底地形与重力异常的相干性
ΔG(k)=ΔG0(k)·W(k)e2πkd。
(3)
再将频域内的船测水深测量格网B0(k)经过低通滤波器处理来恢复频域内长波海底地形D(k)。最后,得到海底地形b(r)模型[15]:
b(r)=d(r)+S(r)·Δg(r)。
(4)
式中:d(r)是D(k)经过傅里叶逆变换的空间域长波海底地形;S(r)是线性回归的比例因子;Δg(r)是ΔG(k)的空间域形态。
保证S&S法反演精度的关键在于,在使用带通重力信号恢复带通海底地形的过程中,如何得到鲁棒性较优且准确度较高的比例因子格网。早期有些学者是采用将船测点处计算的比例因子(即,过原点单点拟合)直接格网化的方法获取比例因子格网。然而,由于测量和地质条件的复杂性,单纯通过船测点处水深与重力数据之比获得的比例因子极易出现极值,而对极值进行粗差剔除并不能根本解决问题。
2018年,范雕等[81]认为由于误差等因素的存在,传统线性回归分析只考虑了一次项(即,比例因子)可能会致使拟合效果欠佳进而影响模型精度,因此提出了利用计算点周围数据(即,多点拟合)顾及常数项的线性拟合方法进行海底地形模型构建,结果表明,该方法在总体性能上,尤其在误差极值上的表现优于传统方法。2019年,Abulaitijiang等[82]分别采用绝对值中位数法和随机抽样法(random sample consensus,RANSAC)来获取比例因子,并指出相比于传统方法,RANSAC法对崎岖地形(如海山)更为有效,更接近船测水深值。2020年,范雕等[83]对比了中位数法、最小二乘法和鲁棒估计法的海底地形建模精度,结果表明,鲁棒估计法构建的模型精度最高且受粗差影响时变化最小。2022年,Xu等[84]通过权衡降低比例因子格网分辨率来提高反演精度,并结合Parker法正演和修正Bott迭代法将非线性影响迭代转化为水深,取得了较高的精度。
受限于船测水深数据分布不足和沉积物厚度变化,不排除仍存在比例因子异常的可能。因此,Smith等[65]利用船测水深数据控制反演模型格网,将S&S法初始海底地形模型进行修正和调整。
4.3 重力地质法
GGM起初被应用于陆地基岩厚度探测[85],后被发现十分适用于利用卫星测高重力异常反演海底地形[86-87]。GGM通过密度差异常数和船测水深控制点,将与海底地形较为线性相关的短波重力异常从观测重力异常中分离出来,从而实现海底地形反演。GGM无需输入复杂的地球物理参数,具有较高的自适应性[88]。
相比于S&S法通过重力数据与船测水深数据的统计分析来估计线性关系,GGM法则是在研究区域内直接采用已知线性关系,利用重力异常和船测控制点三维拟合海底地形模型格网。由于GGM在原理上相当于船测控制点插值在反演模型上,能够尽可能包含船测控制数据的短波信息,精度较高。Kim等[68]比较了研究海域内的GGM模型和S&S模型的功率谱密度(power spectral density,PSD),结果表明GGM能较好地反映12 km以下波段的海底地形信息。
(5)
式中:hj为船测控制点j处的水深;D为参考面深度。
具体构建过程可参考文献[89-90],这里给出GGM水深格网hi的表达式:
(6)
GGM模型精度的高低取决于密度差异常数和短波重力异常模型。确定密度差异常数的一般方法为迭代法,当反演模型与船测迭代点差异最小时停止迭代。受研究区域大小、海底地质情况以及地壳深部质量分布等因素的影响,密度差异常数往往与真实的海洋和地壳之间的密度差异不同,此时的密度差异常数已不具备明确的物理意义[90],其主要作用是配合布格板公式协调海底地形与短波重力异常一一对应的线性关系。
事实上,任何一点的海面重力异常不仅受到该点对应的海底地形的线性影响,还受到周围海底地形起伏等非线性影响。实际计算中,在地形起伏较小或船测数据分布密集的情况下,非线性影响可以被长波重力异常格网较好地吸收,短波重力异常的提取效果较为理想,从而反演精度较高。但是在地形起伏较大或缺少船测水深数据的地区,较为显著非线性重力信号会导致反演精度下降。
目前,已有许多对GGM中密度差异常数确定和长短波重力异常场构建的相关研究。Kim等[68]为减轻对密度差异常数的依赖,提出了使用重力异常的向下延拓估计法来调整密度差异常数;Xing等[18]使用矩形棱镜模型模拟短波重力异常,采用季洪诺夫正则化方法整合了菲律宾西部盆地的地球物理约束。An等[91]将布格板公式引入权重参数,消除区域长波重力效应,改进了海底地形建模精度。
4.4 优化算法
除了船测水深数据、卫星测高数据及其海洋重力场模型等因素,要进一步提高海底地形反演精度,有必要发展非线性海底地形反演理论和方法。
2005年,由于当时美国海军的导航产品未显示关岛南部的一座海山,致使美国旧金山号核攻击潜艇与海山相撞,而在SIO V8.2海底地形模型上却探测到了这座海山。相较于上一版本的V7.2模型,V8.2模型采用了Oldenburg[92]提出的Parker高阶非线性项迭代法,在频谱、精度、不同地形海域表现等方面更优[93],证明了考虑非线性项对海底地形反演的精度提升作用。因此,利用卫星测高重力数据反演海底地形的发展方向之一,是顾及非线性项贡献的海底地形反演。随着计算机性能的提高,使用更为先进、复杂的算法来优化非线性影响成为研究热点。
模拟退火法(simulated annealing,SA)是一种随机寻优算法[94]。利用模拟退火法反演海底地形,系统会在输入的初始海底地形解中添加一些地形扰动,生成一些随机解,将随机解正演后生成的重力数据与实测重力数据导入目标函数中来决定是否接受,直至趋于稳定,最终得到全局最优解。2018年,Yang等[27]采用模拟退火方法,利用卫星测高重力异常垂直梯度数据在太平洋某海域进行实验,结果表明模拟退火法能改进输入模型精度,且相比于Parker公式,对数据分布没有要求,较适合用于航空重力测量数据反演海底地形。2020年,Yang等[95]基于模拟退火法,利用NASA的OMG(oceans melting greenland)任务航空重力测量数据,开展了格林兰岛附近海底地形反演的可行性研究。然而,模拟退火法对计算机资源要求很高,在现有计算条件下不适用于大规模海底地形反演,在即将到来的大数据和人工智能时代,计算资源的问题有望得到解决[27]。
与此同时,得益于人工智能的发展,基于机器学习和深度学习的海底地形反演逐渐兴起。机器学习/深度学习海底地形方法的主要特点在于设计学习框架,通过大量的数据训练与验证,模拟输入数据与待求量之间的关系,建立优化的机器学习/深度学习模型。在这个过程中,能够将数据之间不易考虑到的关系和影响因素纳入学习模型,从而达到降低非线性因素影响的效果。2022年,Sun等[96]基于BP(back propagation)神经网络以重力异常和垂直重力梯度为输入数据,构建了马里亚纳海沟区域的海底地形模型。同年,Annan等[97]基于卷积神经网络(convolutional neural networks,CNN)以垂线偏差、重力异常与垂直重力梯度3种数据为输入数据,构建几内亚湾海底地形模型。2023年,Sun等[98]提出了一种基于神经网络和重力信息小波分解(CNNGWD)相结合的方法,并验证了该方法相比于多层神经网络(MNN)方法反演海底地形的优越性。总的来说,人工智能可以建立垂线偏差、重力异常等多源数据与海底地形间的非线性映射关系且不依赖物理模型。决定海底地形反演精度的关键在于能否从多源数据中选择、提取强相关的特征,并寻找合适的学习框架。此外,由于数据具有很强的空间关联性,人工智能方法的迁移性有待验证。
5 全球海底地形模型
经过多年卫星测高数据的积累和技术发展,国内外研究机构构建了多个全球海底地形模型序列,主要包括S&S系列、DTU系列和GEBCO系列等。
自1994年至今,美国SIO的Sandwell团队一直致力于研究和发布S&S系列海底地形模型,采用S&S法反演原始模型,并使用船测水深数据对模型进行约束,进而生成最终的海底地形产品。S&S系列会随卫星测高数据的更新和技术优化,融合多源船测水深数据,并结合海底地质资料统计分析,不断扩大覆盖范围,提高模型精度和分辨率,topo_9.1以及之后版本的分辨率为1′×1′。近年来,S&S系列保持着每年1次的版本更新频率,2023年1月更新至topo_25.1版本。图6展示了SIO发布的全球海底地形模型topo_24.1。DTU系列由Andersen团队研究和发布,同样采用了S&S法反演海底地形;与S&S系列不同的是,其在使用S&S法构建过程中采用了不同的参数和数据源,目前已于2018年更新至DTU18_BAT。GEBCO系列目前于2023年4月更新至GEBCO_2023版本,来源已于引言中介绍。
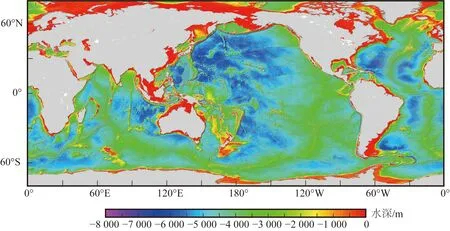
图6 全球海底地形模型topo_24.1[15]
6 未来展望
地球科学数据处理与模型构建一般是从局域至广域,静态到动态,持续向高精度、高分辨率方向发展。本文提出未来构建高精度、高分辨率、全球动态海底地形模型的构想,这一构想的实现有望对海洋地壳形变监测、海底板块运动及地震研究等起到重要作用。得益于卫星测高数据的全球覆盖和重复观测能力,现阶段已经实现了从区域到全球的静态海底地形模型构建,但精度仅为百米级,仍有待提升。以下对构想的可行性进行分析,并提出新的发展要求。
1)卫星测高海洋重力数据:国内外未来仍将致力于研发和改进测高卫星,预计将在2024年、2025年和2027年分别发射Sentinel-3C、Sentinel-6B和Sentinel-3D测高卫星。随着测高精度的改善以及重力场反演技术的成熟,全球海洋重力场模型的精度和分辨率也将得到提高,这为构建高精动态全球海底地形模型奠定了数据基础。建议同时改进船测重力技术、提高船测重力数据覆盖范围和数据积累量,发展卫星测高海洋重力与船测重力数据优化融合关键技术,进一步提升海洋重力场的精度和分辨率。
2)船测水深数据:由于海洋地质、地壳深层及沉积层等影响因素模型化误差较大,目前精度较高的静态海底地形反演多是基于统计模型结合船测水深数据来实现。然而,受船测水深数据质量及分布的限制,反演精度仍有待提高。未来随着更高质量船测水深数据的覆盖,一方面,有望通过精细的船测水深数据正演海洋地质及地壳深层的复杂影响,并将其从海面观测重力异常中与海水质量亏损影响分离,这将为海底资源探测、海底地质调查以及洋壳深层构造探索等方面的地球物理研究提供一定的参考;另一方面,可以利用丰富的船测水深数据作为真值去验证海底地形反演技术的有效性,从而发展无/少船测水深反演技术,此举可以不仅用于构建船测水深数据缺失地区的海底地形模型,而且预计在未来动态海底地形监测方面发挥重要作用。
3)海底地形反演技术:实现海底地形的动态监测对未来海底地形反演技术也需提出新的要求。首先,该技术不能在反演过程中过于依赖船测水深数据来控制反演模型,否则船测水深数据的强控制作用很可能将重力的动态变化剔除。其次,虽然目前统计模型在构建静态海底地形模型时具有更高精度的表现,但是为了能更好地将重力变化转化为水深变化,还需要建立更为严密的重力-地形解析关系。