基于全局滑模的自适应电力系统混沌容错控制
2023-12-07于永进
于永进 杨 洋
基于全局滑模的自适应电力系统混沌容错控制
于永进1杨 洋2
(1. 山东科技大学电气与自动化工程学院 青岛 266590 2. 国家电网阳泉供电公司变电运维中心 阳泉 045000)
当电力系统参数变动或遭受扰动后,系统极易进入局部混沌振荡状态,局部的功角振荡可能会演化为大范围的系统振荡,最终可能造成系统解列等严重后果。因此,抑制电力系统的局部混沌振荡状态具有重要意义。为抑制七阶系统的混沌状态,增强系统的抗扰能力,采用扩张观测器对系统发电机侧与负荷侧的系统项进行观测,设计了基于全局滑模的容错控制器。该文考虑了发电机侧遭受扰动与负荷侧控制器故障的情况。为减少系统在扰动下的最大偏差与稳态误差,并补偿控制器故障导致的输出幅值损失,设计了基于全局滑模的自适应容错控制器。仿真结果表明,当系统分别遭受传输故障、阶跃扰动及控制器故障时,系统在基于自适应全局滑模的容错控制器的作用下均能有效收敛至目标轨道。
电力系统 混沌 全局滑模 自适应 扩张观测器
0 引言
当电力系统遭受外部扰动或参数在某一特定范围内发生变化时,系统功角可能在一定范围内出现无序振荡现象,即系统进入混沌状态。近年来,新能源发电大量接入电力系统,缓解了传统发电模式带来的能源和环境问题。相对于传统能源系统,新能源发电功率的不确定性可视为传统系统的参数变化或外部扰动,极有可能使系统进入振荡状态,在没有得到及时有效的控制下,系统可能最终进入混沌状态[1-2]。
对于低阶模型,目前已有较多文献对其混沌特性分析与控制问题进行研究,提出了多种控制策略。文献[4-8]运用不同的控制理论对二阶模型进行控制器设计,达到良好的控制效果。文献[9-12]分别在不同方面对四阶模型进行混沌特性的分析,并设计了控制器。对于高阶模型,目前学术界普遍承认的最高阶模型为七阶系统模型,其相关研究仍然较少。对于七阶系统的混沌分析,文献[13]运用时域图、相图及庞加莱截面对系统通往混沌的道路进行了分析。对于七阶系统的控制,国内外学者将非线性理论推广至七阶系统中,从不同程度上消除了系统的混沌状态。文献[14]将储能装置添加到七阶电力系统中,使其成为一个十三阶系统,并根据各状态变量之间的耦合关系,将系统分为三个模块,根据反演定理,为各模块均设计了动态滑模面控制器,通过对各个模块的控制使系统各状态变量均收敛至目标轨道。文献[15]将一种新颖的协同控制策略推广至七阶电力系统的混沌控制,通过对所选变量的控制,消除系统各变量的振荡状态。文献[16]基于等效原理,将固定时间控制、自适应控制和滑模控制相结合,提出一种适用于七阶电力系统的自适应控制策略,该策略能保证七阶电力系统在有限时间内收敛至目标轨道。文献[17]运用时间尺度分离理论,设计了一种基于时间尺度分离的滑模控制策略,该控制策略中不含切换项,解决了控制器输出不连续的问题。目前相关文献中所设计的控制器虽能使被控对象收敛至目标轨道,但其控制器设计较为依赖系统的精确模型,并且大部分并未考虑系统在遭受扰动和发生故障时的情况,实用性相对较差。如果系统在遭受较大扰动导致系统模型出现变化,或出现控制器故障导致控制器输出信号幅值下降时,上述控制器可能没有足够的容错能力,导致系统状态偏离目标轨道。
本文建立了考虑外部扰动和控制器故障的七阶电力系统数学模型,并针对该模型设计了一种基于全局滑模的自适应容错控制策略(Adaptive Fault-Tolerant Control, AFTC)。该控制器不需要系统精确的数学模型,只需要系统各状态变量的信息,降低了控制器参数的整定难度,提高了控制器的通用性。针对七阶系统发电机侧易受干扰和负载侧控制器易发生故障的问题,在发电机侧控制器中采用固定增益与自适应增益相结合的控制策略,在负载侧控制器中采用自适应故障估计来补偿控制器故障造成的控制器输出损失。仿真结果表明,当系统在无扰动、外部阶跃扰动、传输故障及控制器故障的情况下,所设计的控制器均能使系统收敛到预定目标轨道附近。
1 电力系统模型
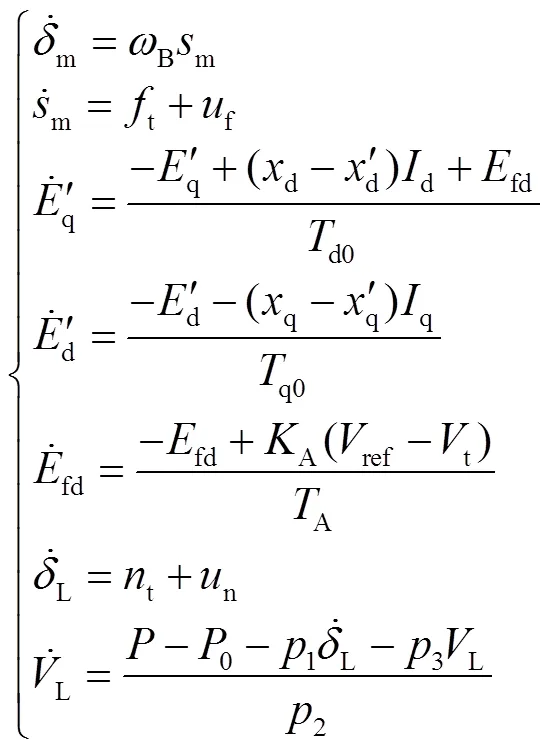
七阶电力系统是以典型的三节点电力系统为研究对象,其由发电机、负荷和无穷大系统组成,各部分之间通过输电线路连接。七阶电力系统电气结构如图1所示。
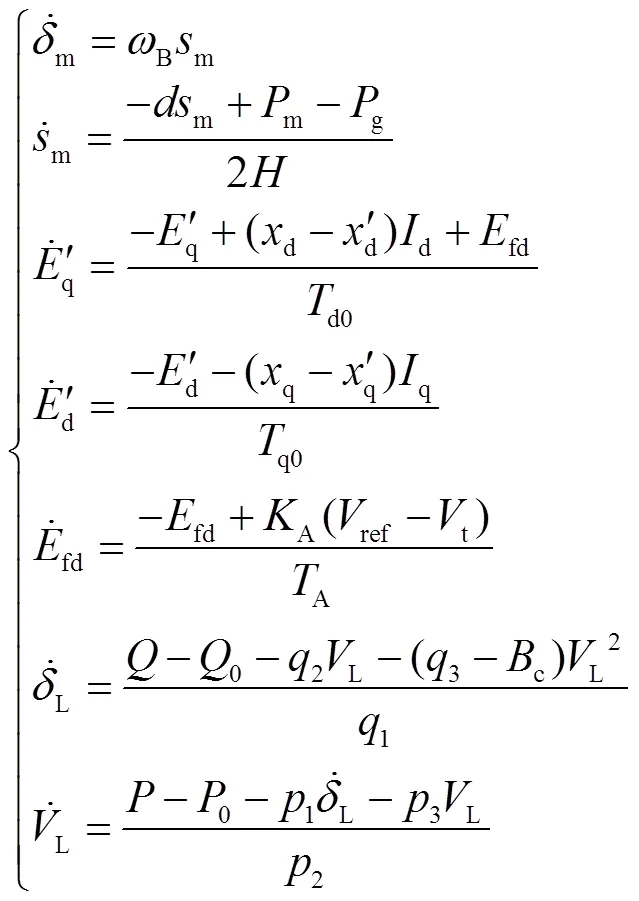
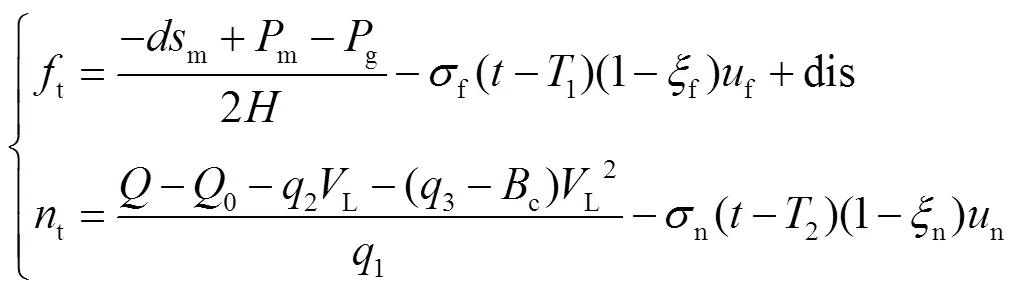
图1中,为无穷大母线电压,1、2和3为输电网络中的各段线路的导纳值,、和为各段线路的导纳角,t为发电机端电压幅值,m为发电机功角,L为负荷侧母线电压幅值,L为负荷侧母线功角,和分别为负荷侧母线的动态有功功率与无功功率。七阶电力系统模型表达式为
2 混沌特性分析
状态变量初始值的选取是系统能否产生混沌的关键条件之一。经过多组迭代,最终选取系统初始值为[1.3331 0 1.332678-0.3283 4.198 0.2936 0.93]。
为研究七阶系统的动态特性,选取系统恒定负荷有功功率0与无功功率0的典型参数为系统变量,其余参数取值均取自文献[14],观察此区间内系统功角的分岔图及在不同取值下系统的三维相图。

由图2可知,当0=0.397(pu)时,系统处于混沌状态;随着0的增加,当0=0.397 9(pu)时系统经历逆向分岔转为4周期态;当0=0.399 1(pu)时系统经历逆向分岔转为2周期态;当0=0.405 5(pu)时系统再次经历逆向分岔,此后系统转为1周期态。此外,当0>0.42(pu)和0<0.397(pu)时,系统分别为1周期和混沌态。由此可得,当0在一定范围内增加,系统经历逆向分岔后从混沌转为周期态。
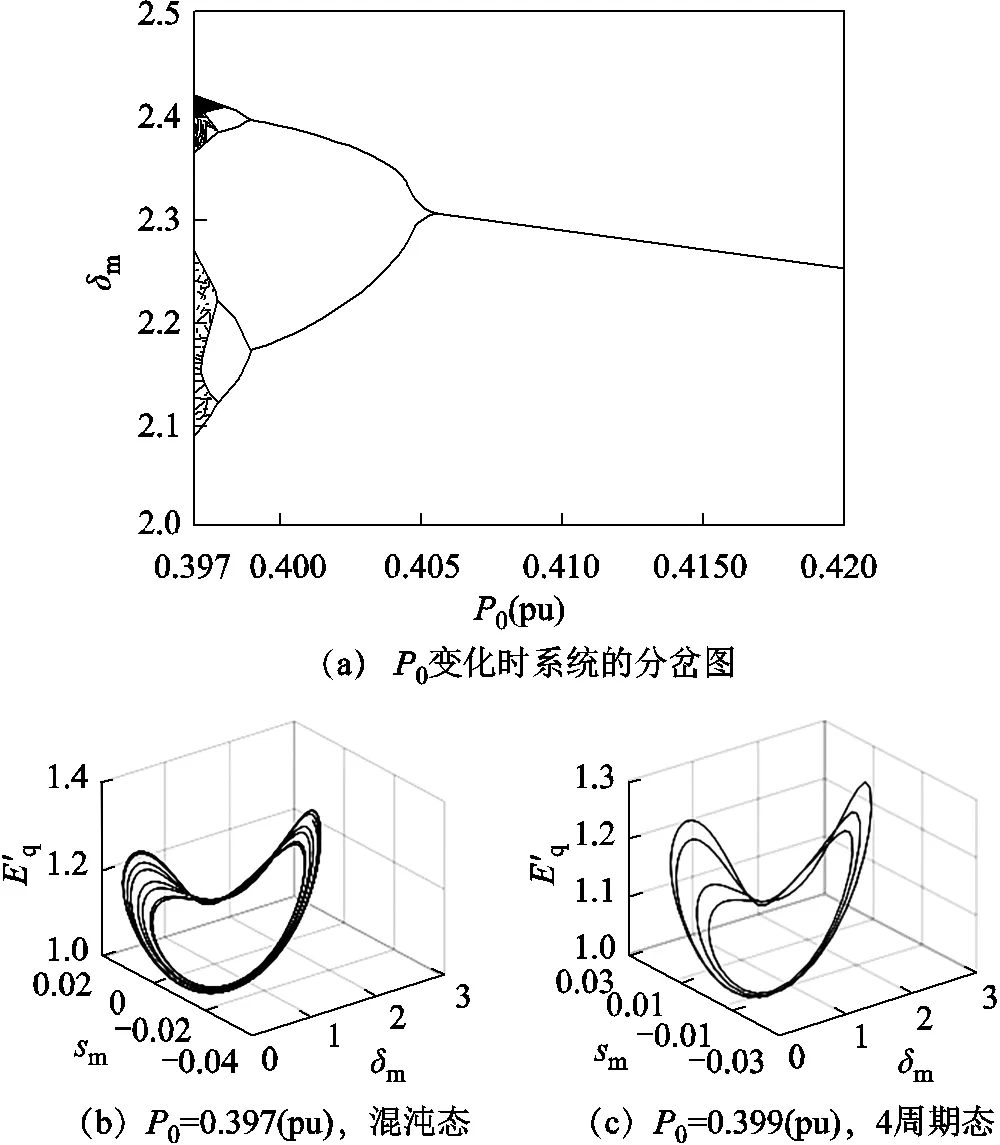
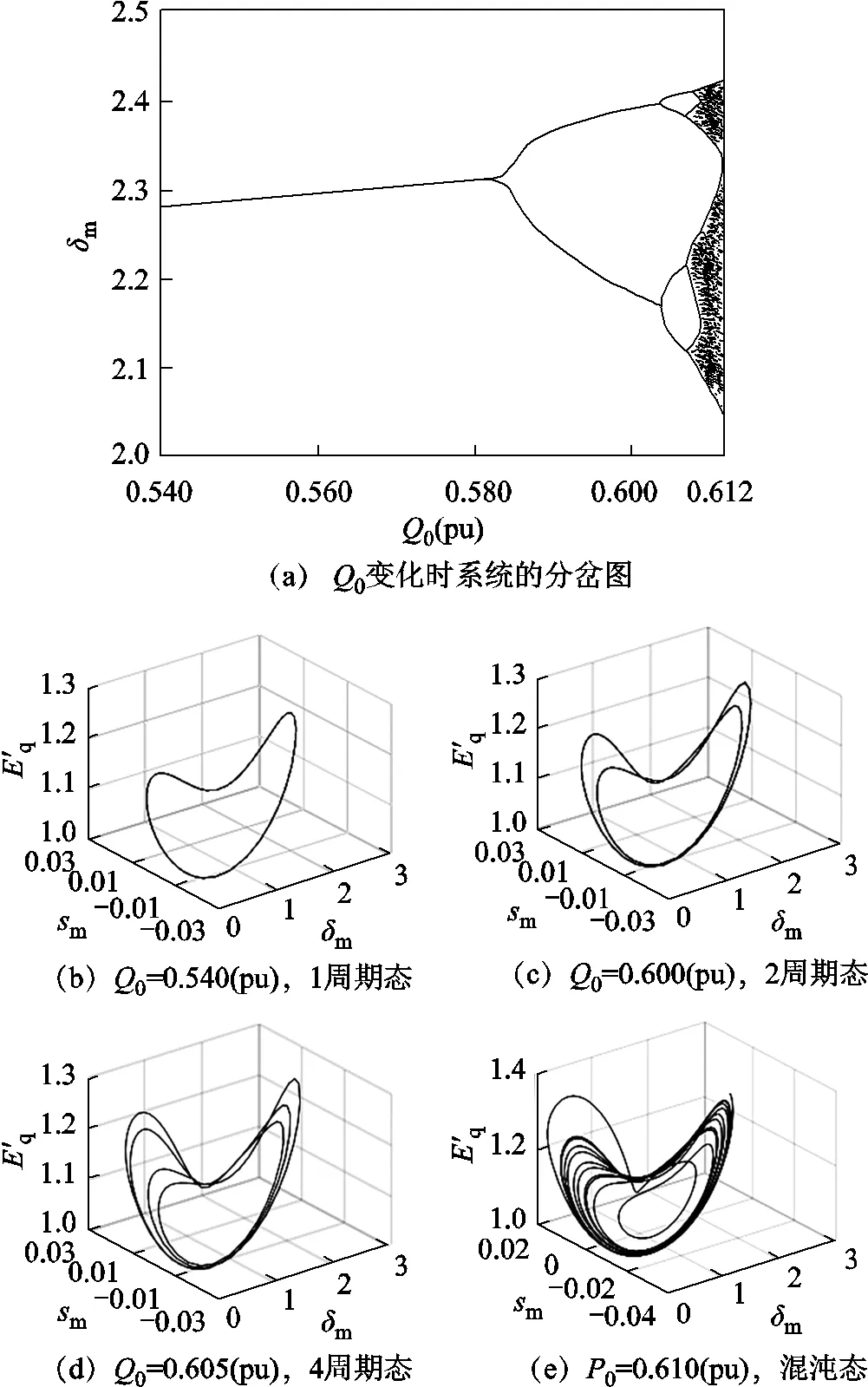
图3 变化时系统的分岔图与相图

3 电力系统控制器设计
3.1 考虑故障与外扰的电力系统模型
在电力系统中,信号传输元件的作用至关重要。而此类元件一般属于高敏感性元件,因而容易遭受干扰而导致其精度下降,从而使电力系统出现振荡现象。本文考虑被控系统与所设计观测器之间的传输故障的情况,被控对象数学模型为

式中,为故障发生时间。式(3)表示时刻传感器发生故障。


除发电机侧时常遭受各类扰动外,负荷端控制器由于工作环境复杂,使得控制器故障率大大提升,并且由于其远离操作中心,使得控制器发生故障时检修人员不能及时进行维修,进而可能导致负荷电压与相角偏离预定值,造成负荷电压质量降低。综上所述,负荷端控制器需要有一定的容错性,以应对可能发生的故障。
负荷端控制器发生故障时,控制器故障的数学模型为

3.2 基于全局滑模的容错控制器设计
滑模控制作为一种实用性很强的控制策略,已被运用在诸多领域中[21-26]。在传统的非线性滑模控制器的设计中,要求控制器输出中含有系统非线性项,故需已知系统准确的数学表达式及各参数值,给控制器的设计带来较大限制。非线性扩张观测器具有所需系统信息少、不依赖系统模型和观测精度高的优点。采用扩张观测器[27]对系统模型进行观测,并将所观测到的系统项输入控制器中,解决了由于故障和扰动而无法及时获取系统项变化的问题。
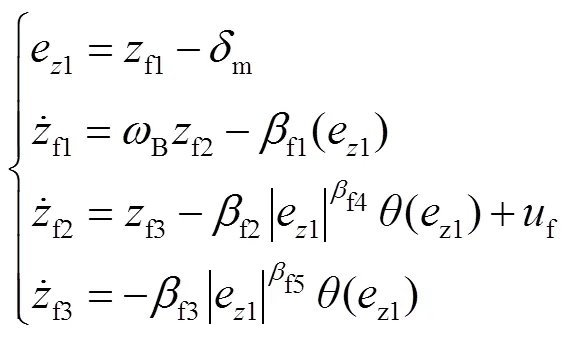
首先,设计观测器对同步发电机转子运行特性进行观测,由于发电机侧功角与系统项存在二阶导数关系。故设计如式(7)所示的三阶扩张观测器。
其次,对负荷侧母线设计观测器。由于负荷侧功角与负荷侧系统项的表达式存在一阶导数关系,设计如式(8)所示的二阶扩张观测器。
取全局滑模控制的滑模面为
根据式(12),基于全局滑模扩张观测器的容错控制(Fault-Tolerant Control, FTC)表达式为
将式(13)代入式(12)中可得

3.3 基于全局滑模的自适应容错控制器设计
发电机端遭受各类扰动的概率较高,当扰动幅值与变化率较高时,对系统的影响尤为剧烈。此时,观测器的最终观测精度可能下降,进而引起控制器输出偏离理想值,系统收敛到稳定轨道的时间显著增加。针对发电机侧扰动问题,在控制器中采用固定增益与自适应增益相结合的方式。由此,基于全局滑模观测器的自适应容错控制的发电机侧控制器输出表达式为


为改善负荷侧控制器的动态特性,提高控制器跟踪精度,将此自适应故障估计的表达式进行变换,变换结果为


对式(27)进行化简后可得

进一步化简可得

式(29)最终可简化为


结合式(1)~式(31)综合可得,AFTC表达式为
综上所述,在考虑外部扰动、传输故障和控制器输出故障的情况下,AFTC系统框图如图4所示。
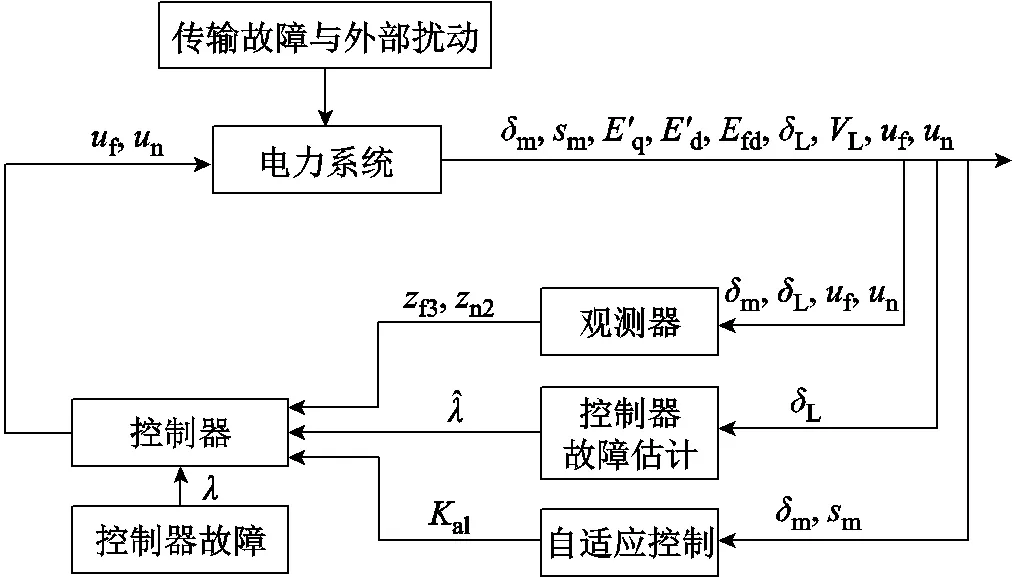
图4 基于全局滑模观测器的自适应容错控制系统框图
4 数值仿真

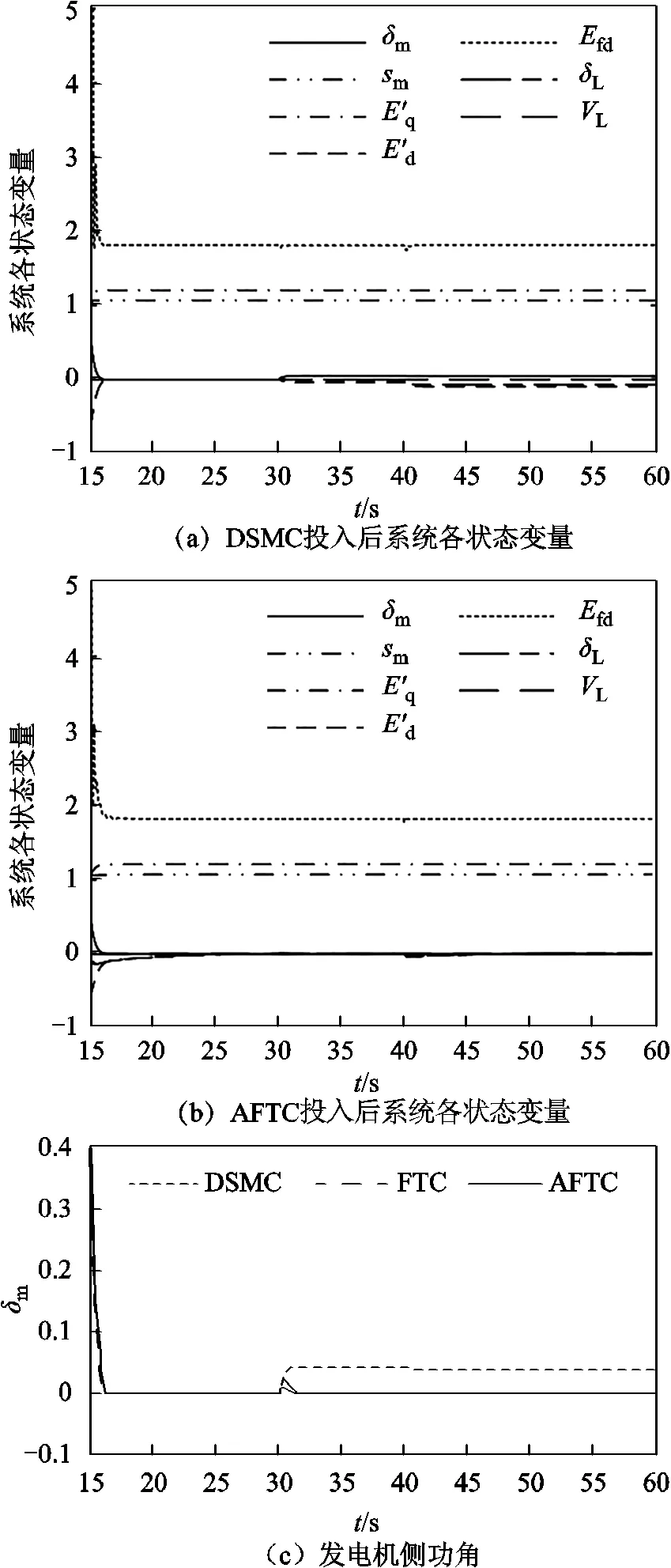
4.1 传输故障下系统的收敛特性
4.2 阶跃扰动下系统的收敛特性
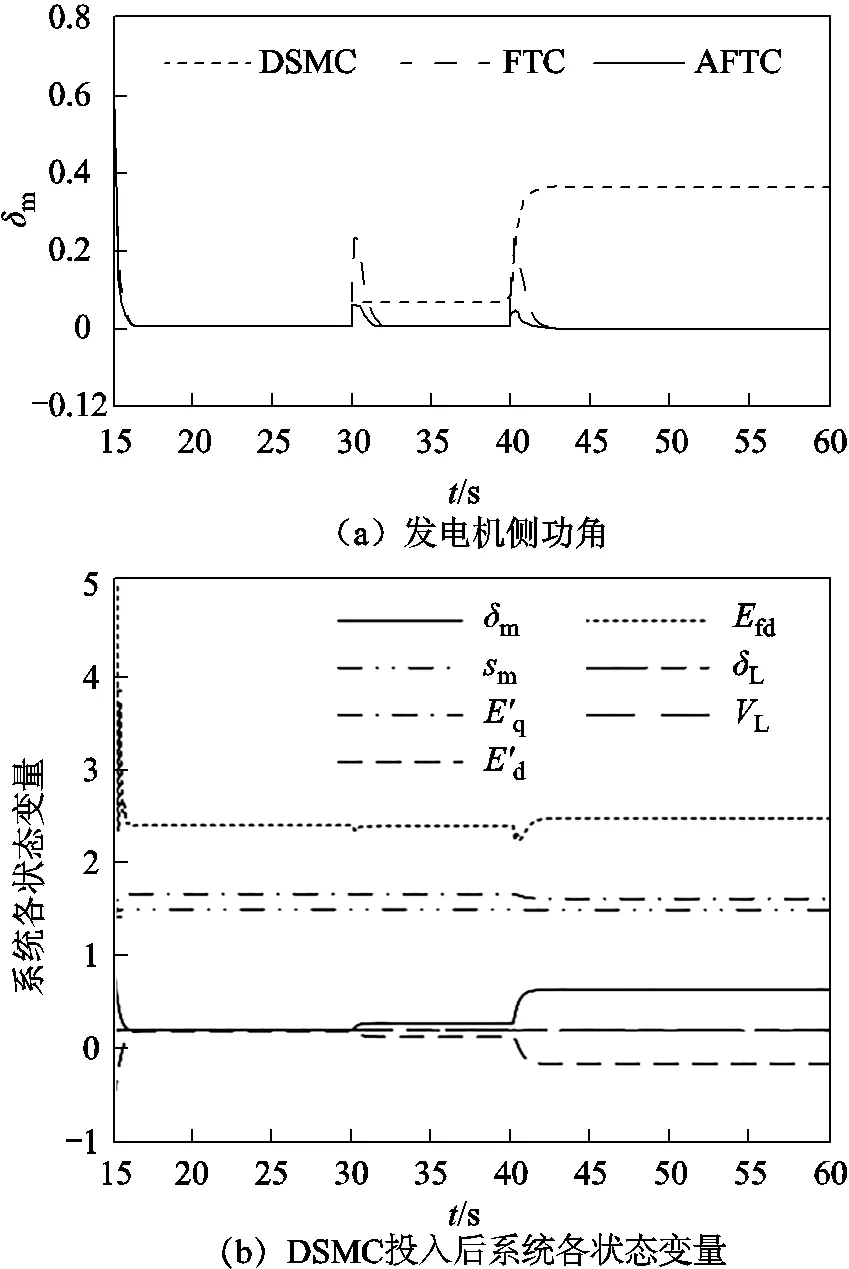
由图7a可知,在DSMC的作用下,m在两次扰动后最终未能收敛至原轨道,两次扰动后m对于目标轨道的稳定偏差分别为0.06和0.35。而在FTC与AFTC的作用下,m在偏离原轨道后迅速收敛至原目标轨道上,在收敛过程中,与目标轨道的最大偏差分别为0.22和0.05。
由图7b可得,当发电机侧在=30 s时第一次遭受阶跃扰动后,DSMC控制下的各状态变量立即偏离原目标轨道,并最终保持在扰动后的偏离轨道上;当发电机侧在=40 s时第二次遭受阶跃扰动后,各状态变量在次发生偏移,并稳定在偏移后的轨道上。由图7c可知,在AFTC的控制作用下,当系统在上述两时刻遭受阶跃扰动后,各状态变量仅出现小幅波动,并很快收敛至原轨道。
4.3 控制器故障下系统的收敛特性
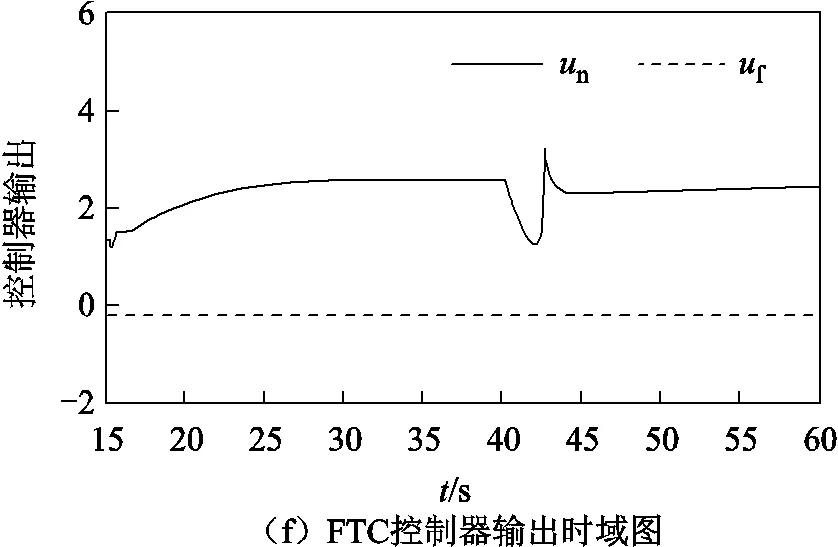
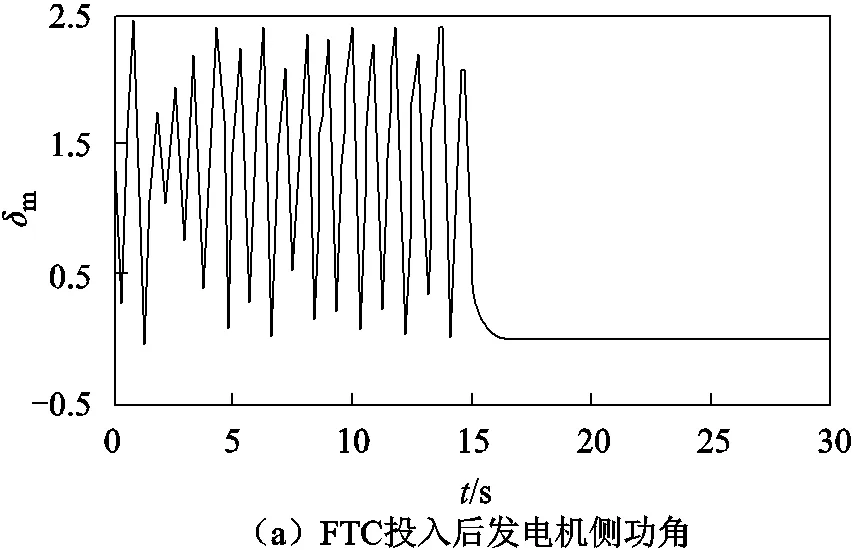
图8 控制器故障下各控制器投入后的系统状态时域图
由图8d可知,当负荷侧控制器发生故障时,DSMC控制器输出信号幅值随之迅速下降,并最终稳定在约理想控制器输出的0.1倍处。由图8e可知,FTC控制器输出同样最终稳定在约理想控制器输出的0.1倍处。由图8f可知,由于自适应故障估计对控制器具有补偿作用,AFTC控制器输出信号幅值先短暂下降,继而随着自适应项的减小而增大,最终逐渐接近故障前的输出信号幅值。
5 结论
1)根据七阶系统的自身特点,运用分岔图与相图对七阶系统进行混沌特性的分析,对系统关键参数变化下系统状态的变化情况进行了分析,得到系统在关键参数0和0下的混沌特性。经过分析可知,当上述参数变化时,系统呈现出周期与混沌状态切换的现象。
2)对于七阶系统的控制问题,为减少控制器对于系统模型的依赖性,提出一种FTC策略。继而考虑发电机易遭受外部扰动,负荷侧控制器易遭受故障,为提高系统的容错能力,提出一种AFTC策略。仿真结果表明,所设计的控制器均能消除系统的混沌状态,而当系统分别遭受阶跃扰动、传输故障与控制器故障时,在AFTC的控制下,系统的最大偏移及稳态误差均较小。
3)对七阶系统来说,不能用传统的Wolf法求取Lyapunov指数,故目前七阶系统只能采用分岔图与相图相结合的方式进行混沌特性的分析。如何对Wolf法进行改进使其可以推广至七阶系统中,是今后需要关注的问题。
[1] 赵光宙, 齐冬莲. 混沌控制理论及其应用[J]. 电工技术学报, 2001, 16(5): 77-82. Zhao Guangzhou, Qi Donglian. Chaotic control theory and applications[J]. Transactions of China Electrote-chnical Society, 2001, 16(5): 77-82.
[2] 王宝华, 杨成梧, 张强. 电力系统分岔与混沌研究综述[J]. 电工技术学报, 2005, 20(7): 1-10. Wang Baohua, Yang Chengwu, Zhang Qiang. Summary of bifurcation and chaos research in electric power system[J]. Transactions of China Electro-technical Society, 2005, 20(7): 1-10.
[3] Kumar A, Anwar M N, Kumar S. Sliding mode controller design for frequency regulation in an interconnected power system[J]. Protection and Control of Modern Power Systems, 2021, 6(1): 6.
[4] 许德智, 黄泊珉, 杨玮林. 神经网络自适应的永磁直线同步电机超扭曲终端滑模控制[J]. 电力系统保护与控制, 2021, 49(13): 64-71. Xu Dezhi, Huang Bomin, Yang Weilin. Neural network adaptive super twist terminal sliding mode control for a permanent magnet linear synchronous mtor[J]. Power System Protection and Control, 2021, 49(13): 64-71.
[5] 于永进, 王家斌, 王艳. 基于自适应全局滑模的电力系统混沌振荡控制[J]. 电力系统保护与控制, 2019, 47(16): 43-49. Yu Yongjin, Wang Jiabin, Wang Yan. Chaotic oscillation control in power system based on adaptive total sliding mode[J]. Power System Protection and Control, 2019, 47(16): 43-49.
[6] Ma Caoyuan, Wang Faxin, Li Zhijie, et al. Adaptive fixed-time fast terminal sliding mode control for chaotic oscillation in power system[J]. Mathematical Problems in Engineering, 2018, 2018: 1-10.
[7] 倪骏康, 刘崇新, 庞霞. 电力系统混沌振荡的等效快速终端模糊滑模控制[J]. 物理学报, 2013, 62(19): 190507. Ni Junkang, Liu Chongxin, Pang Xia. Fuzzy fast terminal sliding mode controller using an equivalent control for chaotic oscillation in power system[J]. Acta Physica Sinica, 2013, 62(19): 190507.
[8] 王家斌, 于永进, 阎振坤, 等. 基于自适应非奇异终端滑模控制的电力系统混沌抑制[J]. 电力系统保护与控制, 2021, 49(7): 120-126.Wang Jiabin, Yu Yongjin, Yan Zhenkun, et al. Chaotic suppression of a power system based on adaptive non-singular terminal sliding mode control[J]. Power System Protection and Control, 2021, 49(7): 120-126.
[9] 李小腾, 王江彬, 刘崇新, 等. 四阶混沌电力系统的全局快速滑模控制器设计[J]. 科学技术与工程, 2021, 21(24): 10298-10303. Li Xiaoteng, Wang Jiangbin, Liu Chongxin, et al. Global fast sliding mode controller design for a four-dimensional chaotic power system[J]. Science Technology and Engineering, 2021, 21(24): 10298-10303.
[10] Alrifai M T, Zribi M. Sliding mode control of chaos in a single machine connected to an infinite bus power system[J]. Mathematical Problems in Engineering, 2018, 2018: 1-13.
[11] 王江彬, 刘崇新. 4阶混沌电力系统的协同控制方法[J]. 西安交通大学学报, 2020, 54(1): 26-31. Wang Jiangbin, Liu Chongxin. Synergetic control method for four-dimensional chaotic power system[J]. Journal of Xi’an Jiaotong University, 2020, 54(1): 26-31.
[12] 杨洋, 于永进, 王云飞. 基于全局滑模时滞的电力系统混沌振荡控制[J]. 电力系统保护与控制, 2021, 49(15): 59-67. Yang Yang, Yu Yongjin, Wang Yunfei. Power system chaotic oscillation control based on global sliding mode time delay[J]. Power System Protection and Control, 2021, 49(15): 59-67.
[13] Yu Yixin, Jia Hongjie, Li Peng, et al. Power system instability and chaos[J]. Electric Power Systems Research, 2003, 65(3): 187-195.
[14] 王江彬, 刘凌, 刘崇新. 基于扩张状态观测器七阶混沌振荡电力系统的滑模变结构控制[J]. 电工技术学报, 2020, 35(21): 4524-4531. Wang Jiangbin, Liu Ling, Liu Chongxin. Sliding mode variable structure control for seven-dimensional chaotic power system based on extended state observer[J]. Transactions of China Electrotechnical Society, 2020, 35(21): 4524-4531.
[15] Wang Jiangbin, Liu Ling, Liu Chongxin, et al. Fixed-time synergetic control for a seven-dimensional chaotic power system model[J]. International Journal of Bifurcation and Chaos, 2019, 29(10): 1950130.
[16] Wang Jiangbin, Liu Ling, Liu Chongxin, et al. Adaptive sliding mode control based on equivalence principle and its application to chaos control in a seven-dimensional power system[J]. Mathematical Problems in Engineering, 2020, 2020: 1-13.
[17] Ni Junkang, Liu Ling, Liu Chongxin, et al. Chattering-free time scale separation sliding mode control design with application to power system chaos suppression[J]. Mathematical Problems in Engineering, 2016, 2016: 1-14.
[18] Rajesh K G, Padiyar K R. Bifurcation analysis of a three node power system with detailed models[J]. International Journal of Electrical Power & Energy Systems, 1999, 21(5): 375-393.
[19] Jia H J, Yu Y X, Li P. Relationship of power system chaos and instability modes[J]. Proceedings of the Chinese Society of Electrical Engineering, 2003, 23(2):1-4.
[20] Jia Hongjie, Yu Yixin, Li Peng, et al. Torus bifurcation and chaos in power systems[C]// Proceedings of International Conference on Power System Technology, Kunming, China, 2002: 1717-1722.
[21] 曹学谦, 葛琼璇, 朱进权, 等. 基于积分滑模的高速磁悬浮列车牵引控制策略[J]. 电工技术学报, 2022, 37(14): 3598-3607. Cao Xueqian, Ge Qiongxuan, Zhu Jinquan, et al. Traction-system research of high-speed maglev train based on integral sliding mode control[J]. Transactions of China Electrotechnical Society, 2022, 37(14): 3598-3607.
[22] 武志涛, 李帅, 程万胜. 基于扩展滑模扰动观测器的永磁直线同步电机定结构滑模位置跟踪控制[J]. 电工技术学报, 2022, 37(10): 2503-2512. Wu Zhitao, Li Shuai, Cheng Wansheng. Fixed structure sliding mode position tracking control for permanent magnet linear synchronous motor based on extended sliding mode disturbance observer[J]. Transactions of China Electrotechnical Society, 2022, 37(10): 2503-2512.
[23] 魏惠芳, 王丽梅. 永磁直线同步电机自适应模糊神经网络时变滑模控制[J]. 电工技术学报, 2022, 37(4): 861-869. Wei Huifang, Wang Limei. Adaptive fuzzy neural network time-varying sliding mode control for permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 861-869.
[24] 张康, 王丽梅. 基于反馈线性化的永磁直线同步电机自适应动态滑模控制[J]. 电工技术学报, 2021, 36(19): 4016-4024. Zhang Kang, Wang Limei. Adaptive dynamic sliding mode control of permanent magnet linear synchronous motor based on feedback linearization[J]. Transactions of China Electrotechnical Society, 2021, 36(19): 4016-4024.
[25] 王勃, 王天擎, 于泳, 等. 感应电机电流环非线性积分滑模控制策略[J]. 电工技术学报, 2021, 36(10): 2039-2048.Wang Bo, Wang Tianqing, Yu Yong, et al. Nonlinear integral sliding mode control strategy for current loop of induction motor drives[J]. Transactions of China Electrotechnical Society, 2021, 36(10): 2039-2048.
[26] 杨挺, 张璐, 张亚健, 等. 基于信息熵计算模型的电力信息物理系统融合控制方法[J]. 电力系统自动化, 2021, 45(12): 65-74. Yang Ting, Zhang Lu, Zhang Yajian, et al. Fusion control method for cyber-physical power system based on information entropy calculation model[J]. Automation of Electric Power Systems, 2021, 45(12): 65-74.
[27] 韩京清. 自抗扰控制技术: 估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008: 197-198.
[28] Feng Y, Bao S, Yu X, Design method of non-singular terminal sliding mode control systems[J]. Control and Decision, 2002(02):194-198.
[29] 刘壮, 郑雪梅, 冯勇, 等. 全阶无抖振非奇异终端滑模控制方法[J]. 控制工程, 2020, 27(5): 824-829. Liu Zhuang, Zheng Xuemei, Feng Yong, et al. Full-order chattering free non-singular terminal sliding mode control method[J]. Control Engineering of China, 2020, 27(5): 824-829.
Chaos Fault-Tolerant Control of Adaptive Power System Based on Global Sliding Mode
Yu Yongjin1Yang Yang2
(1.School of Electrical Engineering and Automation Shandong University of Science and Technology Qingdao 266590 China 2. Substation Operation and Maintenance Center State Grid Yangquan Power Supply Company Yangquan 045000 China)
When the power system suffers from external disturbance or the parameters change in a certain range, the power Angle of the system may appear disordered oscillation in a certain range, that is, the system enters a chaotic state. At present, in order to suppress the chaotic state of power system, controllers using various principles have been designed, but the disturbance and controller failure are rarely considered in the design process. To solve this problem, this paper proposes an adaptive fault-tolerant control strategy based on global sliding mode, which makes the system more stable under the action of the controller.
Firstly, according to the characteristics of the seven-dimensional system, the dynamic characteristics of the system under the change of key parameters0and0are obtained by using the bifurcation diagram and phase diagram. After analysis, it can be seen that when0changes from small to large, the system presents a transition phenomenon from periodic to chaotic state, and when0changes from small to large, the system presents a transition phenomenon from chaotic to periodic state. Through the analysis of chaotic characteristics, the chaotic state parameters of the system are obtained.
Secondly, in order to solve the problem that the controller could not timely obtain the changes of system items due to the disturbance, an observer was designed to observe the operation characteristics of the synchronous generator rotor and input the observation results to the input end of the controller. This paper proposes a Fault-tolerant control (FTC) strategy based on global sliding mode extended observer. In order to further reduce the fluctuation of the system under the disturbance and consider the possible failure, the method of combining fixed gain and adaptive gain is adopted in the controller. A strategy of adaptive fault-tolerant control (AFTC) based on global sliding mode observer is proposed.
The simulation results show that, under the action of FTC, the state variables of the system converge to the fixed orbit, and the output of the extended observer approximates the system term in finite time. When the system suffers from transmission faults, the stable deviations ofmandLfrom the current orbit and the target orbit are 0.04 and -0.07 under the action of DSMC. Under the action of FTC and AFTC, the maximum deviation ofmandLfrom the target orbit is 0.022 and 0.009, and -0.038 and -0.037, respectively. When the system is subjected to step perturbation, under the action of DSMC, the stability deviation ofmto the target orbit after two perturbations is 0.06 and 0.35, respectively. Under the action of FTC and AFTC,mrapidly converges to the original target orbit after deviating from the original orbit, and the maximum deviation from the target orbit is 0.22 and 0.05, respectively. When the system suffers from controller failure, the stability deviation ofLto the target orbit is -0.20 under the action of DSMC. Under the action of FTC, the stability deviation ofLto the target orbit is -0.16. Under the action of AFTC,Lconverges to the vicinity of the target orbit again, and the maximum deviation ofLto the target orbit is -0.11, and the stability deviation is -0.013.
By analyzing the simulation results, it can be found that all the designed controllers can eliminate the chaotic state of the system, and when the system is subjected to step disturbance, transmission fault and controller fault, the maximum offset and steady-state error of the system are small under the control of AFTC.
Power system, chaos, global sliding mode, adaptive, extended state observer
10.19595/j.cnki.1000-6753.tces.221660
TM712
国家自然科学基金资助项目(61803233)。
2022-08-30
2022-10-18
于永进 男,1980年生,副教授,硕士生导师,研究方向为电力系统运行与控制。E-mail:yaydjto@ 163.com
杨 洋 男,1995年生,硕士,研究方向电力系统运行与控制。E-mail:2534019091@qq.com(通信作者)
(编辑 赫蕾)
