先进发电机管理系统在DP3船舶的应用
2023-12-07沈涛



摘 要:21世纪是全世界大规模开发利用海洋资源、发展海洋经济的新时期,各类大型海洋工程爆发式增长,需要投入大批优质的海工船舶,其中作业能力和功能最强的动力定位3级(简称DP3)船舶起到了关键作用。如何确保DP3船舶在海洋工程中更稳定、更可靠的运行,船舶电站的管理尤为重要,其中电网和发电机的监控和管理成为了重中之重。先进发电机管理系统(简称AGS),基于船舶电站管理系统(简称PMS),相比于传统的PMS系统,AGS从发电机的有功功率和无功功率的关系出发,通过监测柴油机油门齿条/有功功率,励磁电流/无功功率,分析电压和频率的变化趋势,在DROOP(均功)模式下,监测其变化率,从而可以在多台并网运行发电机中精确的监控每一台发电机,当其中某一台或多台发电机发生异常时,能及时采取措施,并将其分断或隔离开来,保证DP3 船舶的稳定运行。
关键词:AGS;PMS;DP3;有功功率;无功功率
中图分类号:U665.12
0 引 言
我国是一个海洋大国,拥有着1.8万km的海岸线,300多万km2的管辖海域面积,沿海有着丰富的油气资源和渔业资源,还可以开发大量的风能资源。习近平总书记多次强调建设海洋强国的目标,要实现这一宏伟的目标,需要建造大型的海洋工程,建造先进的海洋工程;稳定、可靠、安全的海洋工程船舶是必可不少的强兵利器。
我国的大型DP船舶起步较晚,但依托我国经济的飞速发展,船舶建造发展迅速,尤其是船体结构,自动化电站,重吊建设都已接近或达到世界先进水平。国内目前已成熟掌握DP3船舶的设计建造,近期几艘DP3船舶的交付,代表着国内DP3船舶的建造进入了一个新的阶段。这些船舶均配置当前世界最先进DP3动力定位系统,全船中压电站配置采用CLOSE-BUE TIE(中压系统一字排)模式或CLOSE-RING(中压环网),将燃油经济性和船舶安全性相结合,在提高燃油经济性的同时,对于船舶电站稳定和安全提出更高的要求。DP3船舶在最初发展时,从船舶海工作业安全性考虑,从绝对冗余出发,中压母排都采用分区供电模式,分区供电能源效率相对较低,进入到21世纪,随着人类的环保意识逐步提高,CLOSE-BUSTIE模式逐步运用到DP3船舶中,中压母线采用合排,發电机功率可以更合理的分配,但是对于电站运行的稳定性要求更高,为保证船舶在DP作业中绝对安全性,结合环保节能要求,AGS作为一项新的发电机管理模式加入到DP-PMS软件中,DP3(CLOSE-BUSTIE)采用中压一字排合排供电,低压系统分区供电,可以更加优化电力分配,传统的船舶电网保护主要分为柴油机/PMS/中压配电板等来实现系统保护,通过中压配电板继保监测发电机的电压、电流、频率、差动、零序电流等参数来对发电机进行运行保护。AGS从发电机的有功功率和无功功率关系出发(即发电机的转速控制和电压控制),通过实时监测在网发电机的有功功率和无功功率变化率,通过与自身设定值以及在网发电机参数比较,能够及时发现在网发电机的异常,一旦发电机发生故障达到设定临界点,AGS将切断故障发电机或隔离母排,启动备用发电机,保证船舶电站系统的正常运行[1]。
1 DP3(CLOSE-BUSTIE)系统基本模型
以某DP3(CLOSE-BUE TIE)船舶为例,船舶配置8台ABB发电机(8*5588KVA 11KV 60HZ),中压配电板分为4段母排(HSB1-4),船舶采用合排运行模式,在DP3作业时,HSB1-HSB3-HSB4-HSB2母联开关依次相连,HSB1&2之间母联开关断开。中压母排连接如图1所示。
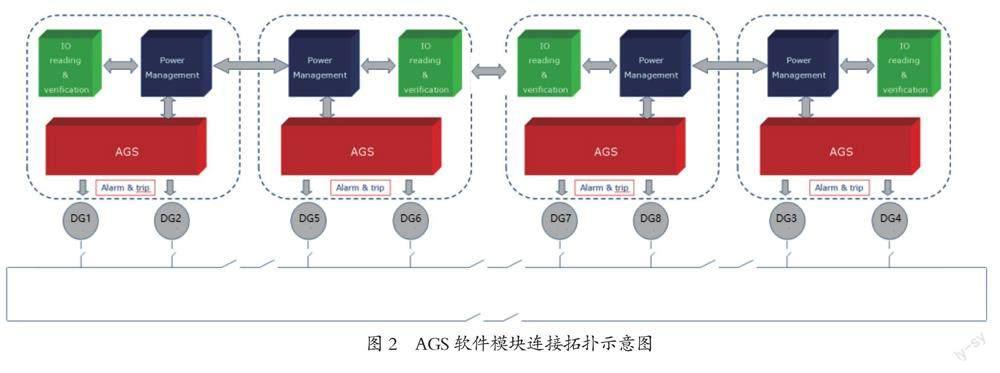
在DP3运行过程中低压主配电板由日用变压器分别单独供电,达到完全独立。为保证船舶在DP3状态下安全稳定运行,仅靠PMS的基础控制功能,不能完全达到系统要求,需要增加对发电机配电板状态监控的手段。KONGSBERG公司为船舶配置的K-CHIEF系统,整合了AGS系统,AGS能够优先快速发现故障机以及故障排并能及时采取有效措施,将相应的故障发电机隔离开来,并启动备用发电机保证剩余三段母排能够满足船舶稳定运行的作业要求。船舶4段母排(HSB1-4)分别配置一套AGS软件模块,模块整合在每一段母排 Process Station(RCU)内,相互之间通过网络相连。拓扑示意如图2所示。
2 AGS系统原理
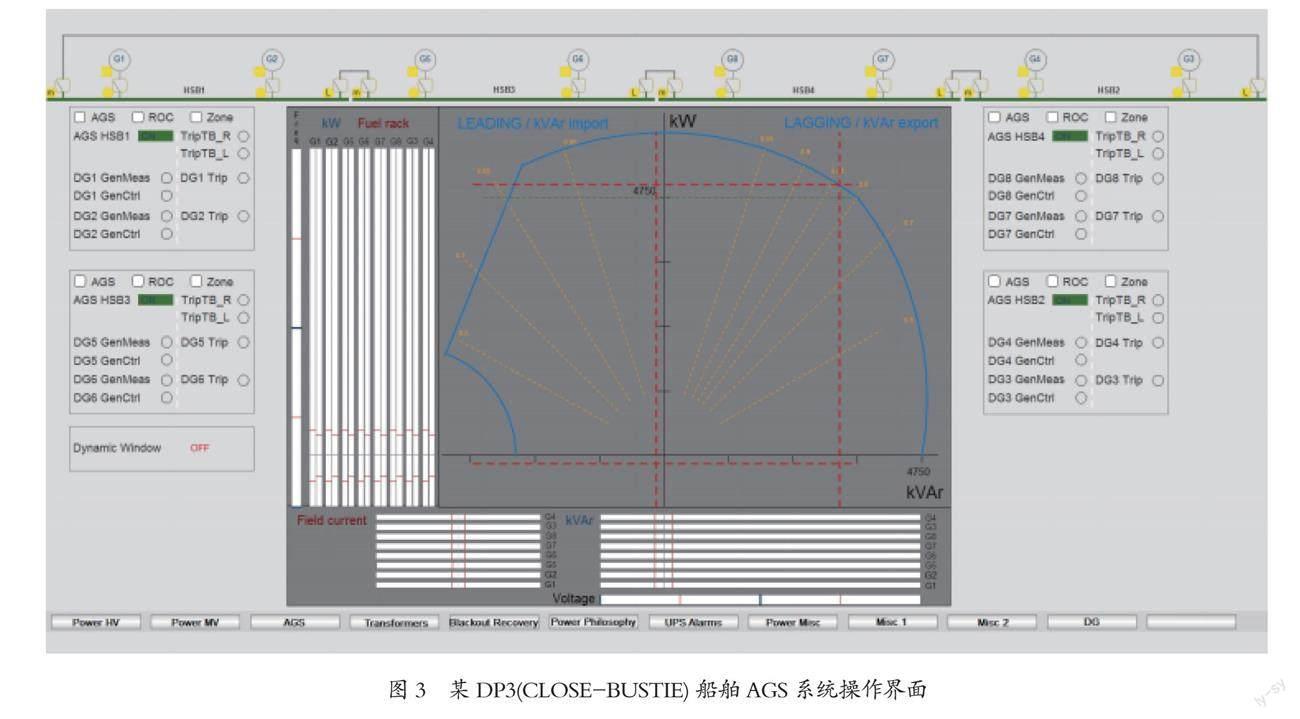
某DP3(CLOSE-BUSTIE)船舶AGS系统操作界面如图3所示。
AGS配置在KCHIEF-PMS中并且操作人员可以选择打开还是关闭AGS功能。AGS主要通过对发电机两大方面参数进行分析来实现保护功能:监控速度控制系统(active load-sharing);监测电压控制系统(reactive load-sharing)。
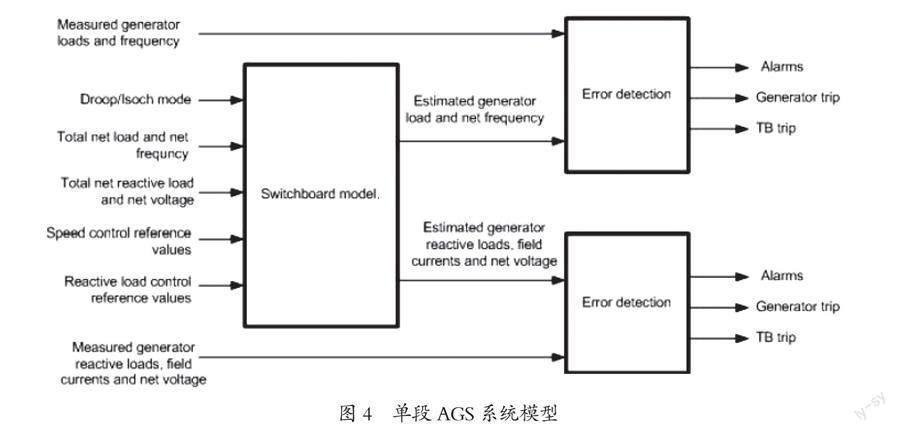
AGS软件系统根据系统设备调试时采集的参数来建立模型,采集发电机实际运行时的参数值。ZERO LOAD/FULL LOAD等工况下各项参数(有功功率,无功功率,励磁电流,励磁电压,油门刻度,额定电压,额定电流,实时电压电流,实时频率),动态监测发电机的运行状态,通过系统模型与实时参数变化率之间的趋势对比,来分析整个电站的运行状况,从而保证电站的安全运行。单段AGS的系统模型如图4所示,根据模型计算出当前工况下发电机各项参数期望值,并将与实际反馈值对比,当偏差超过设定时,AGS将会作出动作切断故障机,启动备用机。具体设定偏差可根据实际情况实时调整,本船AGS偏差限制设定,DROOP模式下有功功率限制偏差10%,无功功率限制偏差10%,电压偏差0.3%,频率偏差0.3 Hz,偏差及延时设定可根据现场工况实际修改[2] 。
2.1 监控速度控制系统
通过对发电机有功功率和运行频率(柴油机运行速度)。AGS系统持续通过系统负载分配设定点和速度的实际测量值对比来监测发电机的运行,通过在网发电机参数的对比,通过内部软件投票系统,分析出故障机。某船发电机额定频率60HZ(50HZ船舶原理一致)如图5所示。
图5 速度监测模型
监控速度控制系统,主要有以下几种故障模型:
(1)故障机低频低功率,会导致电网其他在网发电机低频高功率,变化速率分为慢速和快速,慢速报警并启动备用机,快速切断发电机并启动备用机。
(2)故障机高频高功率,会导致电网其他在网发电机高频低功率,变化速率分为慢速和快速 ,慢速报警,快速切断发电机并启动备用机。
(3)zone protection,其他排发电机高频高功率,导致当前母排发电机高频低功率(逆功),变化速率分为慢速和快速,慢速报警,快速系统切断BUSTIE。
(4)zone protection,其他排发电机低频高功率,导致当前母排发电机低频高功率(过载>100%),变化速率分为慢速和快速,慢速报警并启动备用机,快速切断并启动备用机。
(5)电网过载低频,功率限制降低失败,导致整个电网低频,系统切断BUSTIE 并启动备用机 。
速度控制系统,主要针对于柴油机调速器,高压油泵等发生可能故障时,作出的应急反应。当发电机转速异常导致的功率分配异常,在发电机电流电压频率达到配电板继电保护器设定保护范围之前,可以准确的分析判断出故障机,保证剩余在网设备正常运行。
2.2 监测电压控制系统
AGS通过实时对电网电压,在网发电机无功功率,发电机励磁电流(AVR)三个参数的监测,并与软件设定模型分析对比,通过变化率和趋势对比,及时发现故障机,切断故障源,保证电网安全稳定运行。通过在网发电机之间参数的对比,采取软件对比投票功能,计算无功功率,励磁电流和电压的偏差,从而分析得出故障机,并及时报警切断。
监测电压控制系统,主要有以下几种故障模型:
(1)AVR电压反馈丢失,导致发电机励磁电流增加,电网电压增加,无功功率增加,导致在网剩余发电机高电压低无功(逆无功)。
(2)AVR故障,导致发电机励磁电流降低或者为0,无功功率降低,导致电网的电压整体下降,剩余发电机无功增加。
(3)电网系统无功功率增加,电网电压下降。
电压控制系统,主要针对于发电机AVR异常,无功功率分配异常等状态,作出应急反应。
Zone protection是AGS的一个相对独立的功能,它通过切断母排主开关的方式,将故障排隔离。以某轮为例,将一字母排分开,分为4段,根据DP3的要求,至少可以保证3段母排正常运行,达到DP3的要求。
3 AGS/PMS/柴油机安保系统/中压配电板继电保护器保护范围对比
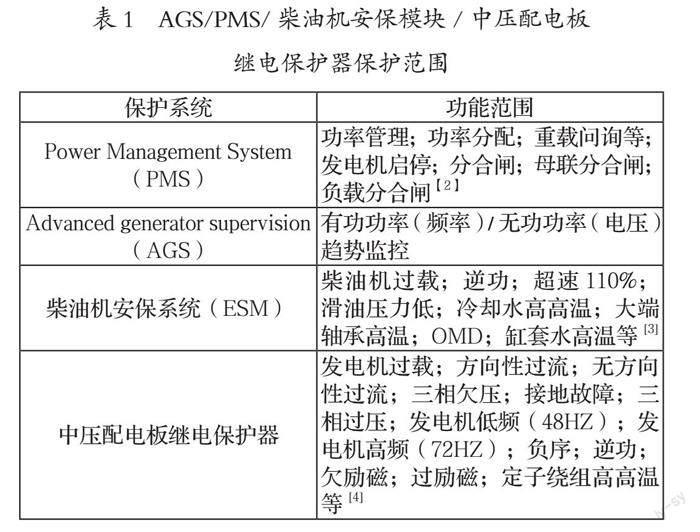
以某轮为例船舶电站主要由以下4种方式管理,确保电网系统稳定安全运行:PMS/AGS/柴油机安保系统/中压配电板继电保护器。具体见表1。
表1 AGS/PMS/柴油机安保模块/中压配电板
继电保护器保护范围
通过表格1可以看出,PMS主要侧重于船舶电网电站的功率管理,功率分配,重载问询,发电机启停并网等基本 功能,并监控所有的参数数据 ;柴油机安保系统(ESM)主要侧重于对柴油机本身硬件系统的保护,对于会造成机损可能的故障作出应急反应,及时切断故障柴油机;中压配电板继电保护器主要通过测量发电机电流电压频率功率等参数,当发生故障时,某些参数达到临界值时,继电器保护器切断发电机或者母联开关,达到保护整个电网的目的。相比于这3种措施,AGS通过监测参数的实时变化情况,通过对比,在柴油机或发电机故障发生初期,可以更快的发现在网发电机的异常,在电流电压频率等参数未达到继保整定值,即柴油机安保系统/发电机继电保护器介入之前,可以将故障隔离出来,切换故障发电机及故障排,从而保证剩余电网系统的正常稳定运行[5]。
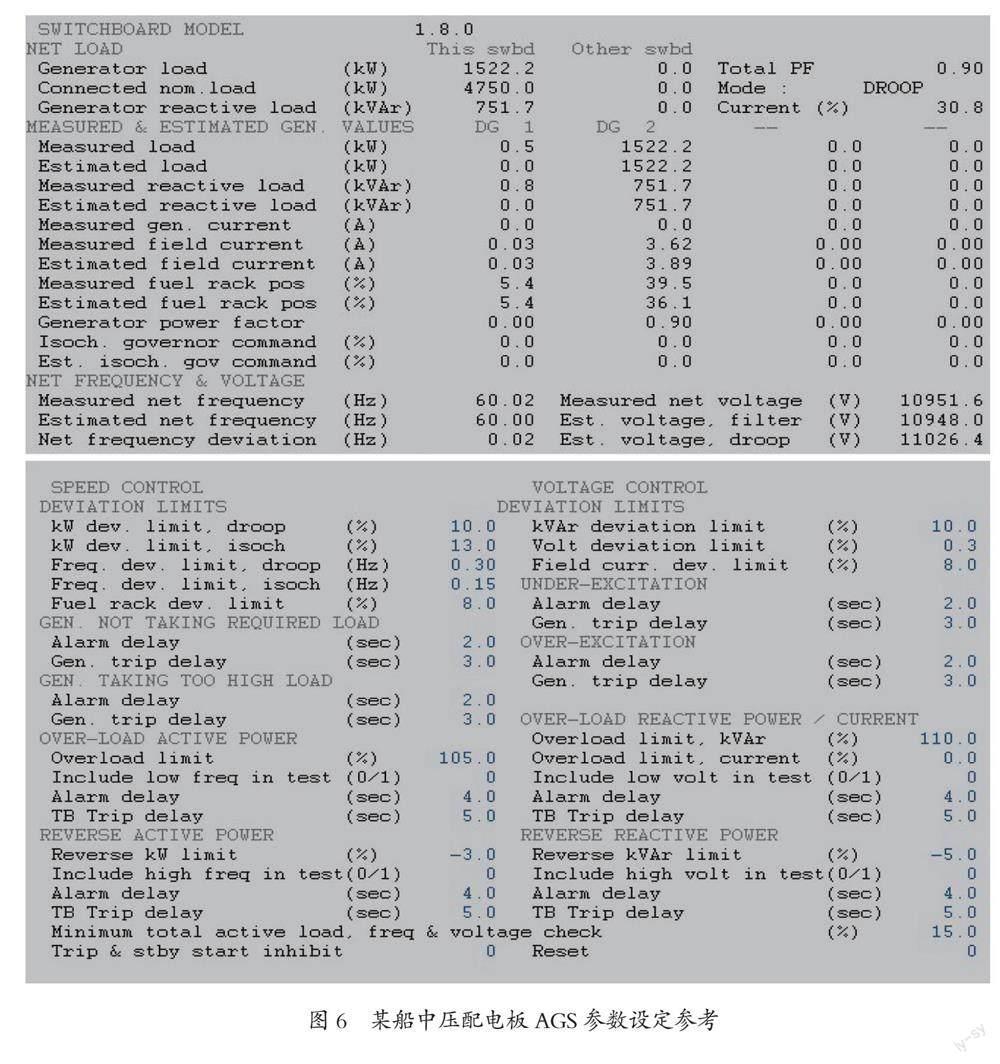
4 AGS 模型参数设定
AGS系统软件参数设定实时记录当前在网发电机及母排有功功率及无功功率,其他母排在线功率,功率因素等分别记录每台发电机measured load(反馈负载),estimated load(期望负载);measured reactive load(反馈无功),estimated reactive load(期望无功);measured gen.current(反馈电流),measured filed current(反馈励磁电流),estimated field current(期望励磁电流);measured fuel rack position(反馈油门齿条),estimated fuel rack position(期望油门齿条);measured net frequency(反馈频率),estimated net frequency(期望频率);并在系统参数中设定发电机额定功率,额定电流,励磁电流最小值,高功率因素0.95时励磁电流,低功率因素0.85时励磁电流,可计算励磁电流最大值。通过这些参数设定,建立系统模型,通过监测运行参数的变化趋势,与模型计算预期值作出对比,当偏差超出设定值可作出报警提示并动作。可以根据现场工况分别设定DEVIATION LIMITS(偏差限制),ALARM DELAY(报警延时),TRIP DELAY(脱扣延时)等时间参数。随着柴油机长期运行,工况可能会发生改变,可根据现场实际测定值,修改部分设定值,比如油门齿条等参数。具体的参数设定可参考图6。
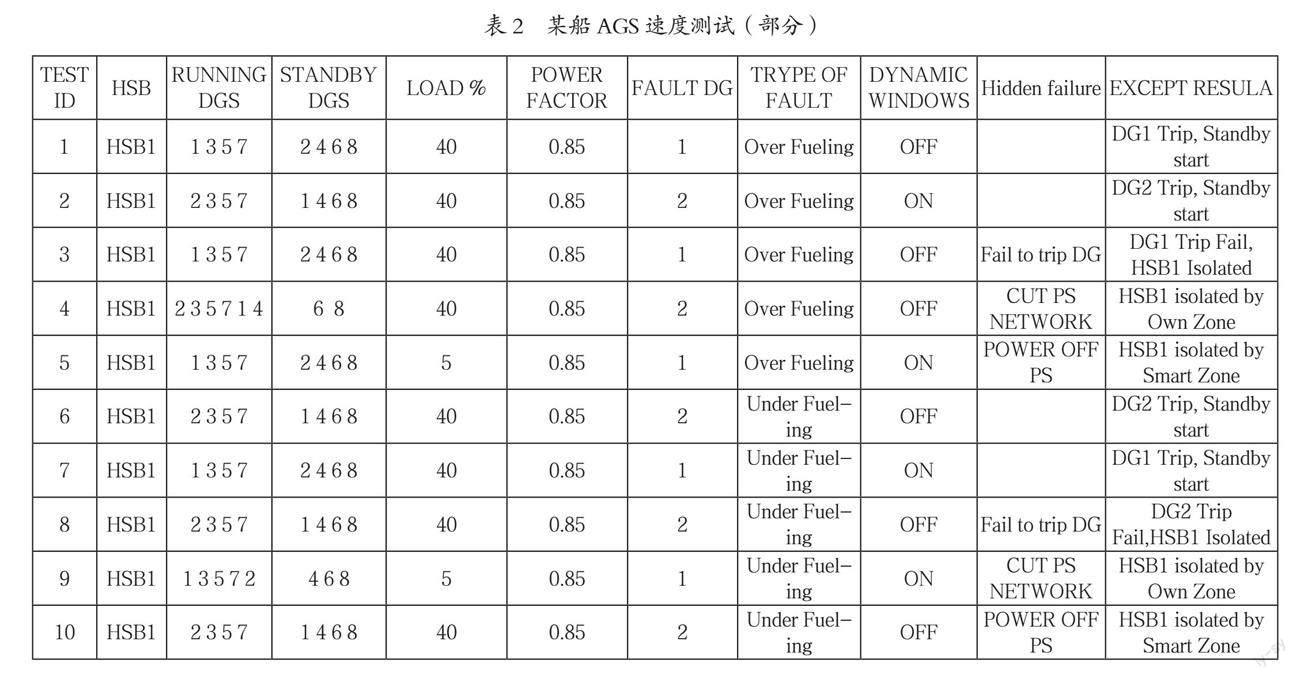
5 船舶AGS调试测试结果
表2中为某船系统建模和测试时,相应AGS速度控制测试(部分),从中可以看出AGS对于电网频率和有功功率的监测通过对发电机运行参数变化率的监测,达到及时发现故障机,切断故障源保证电网安全稳定运行。
表3中為某船系统建模和测试时,相应AGS电压控制测试记录(部分),从中可以看出AGS对于电网电压和无功功率的监测通过对发电机运行参数变化率的监测,达到及时发现故障机,切断故障源保证电网安全稳定运行。
6 结束语
综合比较可以看出,相比与传统PMS系统(电站管理,功率分配)和继电保护器对于电站的监测和防护(过载,欠压,低频,差动等)AGS结合DP3船舶的最新运行要求,将船舶安全、日常管理、灵活控制各方面优化结合;从电网两个最重要的参数出发,通过对发电机运行参数和系统设定参数分析对比,将在网运行发电机有功功率和无功功率对比,通过分析变化率关系,投票表决对比,能够发现故障的端倪;在电流电压等参数均在继保测量正常范围内,达到危险值之前,能够提前分析出故障的方向,发现故障机的存在,提前采取有效的方案措施,切断故障发电机或汇流排,保证船舶在DP模式下的安全运行。随着船舶电网拓扑向CLOSE –BUETIE和CLOSE- RING的发展,AGS在未来DP船舶中应用也将更为广泛。
参考文献
[1] CCS规范研究所. CCS船级社DP规范,第四分册[G].2018.7.
[2] KONGSBERG. KONGSBERG Functional Design Document PMS1460366-C-8 [R]2019.6.
[3] 操定友.浅谈高DP2船舶电站管理系统[J].电脑知识与技术,2021.6.
[4] ABB.11KV Switchboard function description 3ACM000325-302-C [R] 2019.1.
[5] 余小青. 动力定位船舶电站闭排运行的设计研究[J].中国设备工程,2021.2.
作者简介:
沈涛,轮机长,大专,研究方向:动力定位船舶电站及设备,(E-mail)daozi_8402@163.com,13621826905
