基于综合监测系统的无人船自主航行能力评价
2023-12-04陈天宇许凯玮
徐 力,陈天宇,许凯玮,胡 琼
(中国船舶科学研究中心,江苏 无锡 214082)
0 引言
无人船在海上自主航行时,相比水池与湖泊,更加复杂的海洋环境对无人船的自主航行控制技术提出了更高的要求,带来了诸如态势感知系统易受干扰、通信距离远、船体运动受风、浪、流影响易偏离预定航道等挑战。因此,开展无人船自主航行评价技术研究,对无人船自主航行控制系统的测试验证、综合评估及后续提升与改进具有现实意义。
本文在前人研究基础上[1–3],提出一种无人船自主航行综合监测系统,针对无人船自主航行时各关键参数的监测,搜集到无人船自主航行状态动态关键数据,包括航行速度、航向角、首向角、经纬度坐标等。通过与测试方发布的任务流程以及数字化实际海洋环境的结合,构建数字化的无人船自主航行场景,通过数学方法对该场景下的无人船自主航行任务完成情况进行综合评价,并得到量化结果[4–5]。
1 无人船自主航行综合监测系统方案设计
综合监测系统的主要用途是监测无人船在航行过程中产生的关键性能参数,包括航行环境参数(风速、风向)和航行性能参数(航速、航向、轴转速、轴扭矩、轴功率、纵横摇、船首和船尾加速度、舵角等),为无人船关键智能系统的陆上联调试验及海上试验提供支撑,为无人船自主航行效能的评估打下基础。
无人船自主航行综合监测系统主要分为船载子系统、船岸通信子系统以及岸基子系统3 部分,如图1所示。
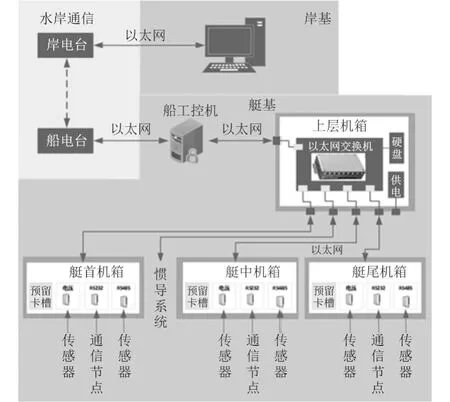
图1 无人船综合监测系统组成Fig.1 Composition of a comprehensive monitoring system for the unmanned surface vehicle
1.1 船载子系统
船载子系统主要实现对船上数据的实时采集、储存、处理和管理,实现无人船实时状态监测,并将监测结果通过通信子系统发送至岸基子系统。主要包括信号采集节点(船首/船中/船尾)、综合监测节点、船端工控机和各类测试传感器。
信号采集节点主要由FPGA 机箱与信号模块组成,负责将传感器采集的RS232 信号、RS485 信号、电压信号和以太网信号转化或保持为以太网信号。输入端为上述各种信号插口,输出端均为以太网插口。
综合监测节点主要包括存储硬盘、以太网交换机、适配电源、电源管理器,负责对采集节点发送来的信号进行预处理、显示、存储、数据处理,将采集数据实时发送到船载工控机,以及接收船载工控机及测试软件的配置、启动停止等控制命令。
船载工控机主要用于测试与评估软件的搭载,以及对包括通信模块在内的整个系统进行控制。
1.2 船岸通信子系统
船岸通信子系统主要提供无人船与岸基之间的无线通信链路能力,采用无线电台,负责水上平台与岸上平台间的实时数据传输,包括船端和岸基两部分,如图2 所示。主要功能包括:船上无线电台通过通信接口接收船载综合监测子系统获取的无人船自主航行状态数据,并通过无线方式发送至岸基,岸基接收到平台端发送来的数据后,通过通信接口将数据传输至岸基工控机。船端和岸基无线电台设备完全相同,均具备接收和发送功能。
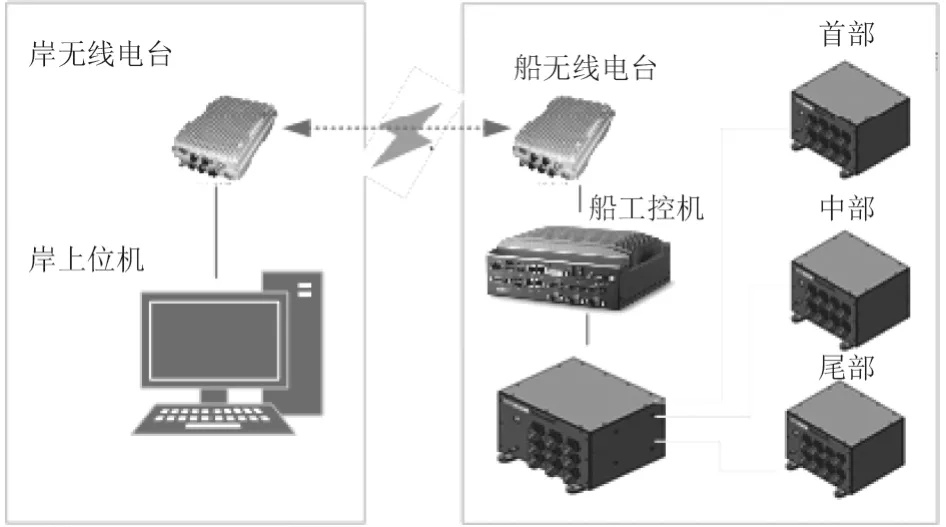
图2 艇岸通信模块架构图Fig.2 Architecture diagram of boat-to-shore communication module
1.3 岸基子系统
岸基子系统包括岸基服务器和运行于服务器的上位机软件,主要用于实时显示无人船航行状态数据、航后船载终端积累的大量采集数据等,在此基础上,实现状态监控及无人船自主航行能力评估等应用。同时,也可通过岸船一体化设计,实现对船端更加灵活的扩展能力和功能升级。岸基子系统主要功能包括:
1)配置和传感器相关的采集模块的参数,如设定传感器零位、采样频率等;
2)对整个无人船综合监测系统的控制;
3)对上传的数据进行实时显示,包括频谱、特征量等信息;
4)对数据有二次处理功能,包括积分、数值统计等;
5)对由通信系统发来的船端采集数据进行存储与回放。
2 无人船自主航行能力评价
基于无人船综合监测系统,将采集到的数据通过通信模块以udp 报文的形式传输至岸端工控机,再将报文数据以.xls 文件的形式进行储存。
结合自主避碰、自主循迹等自主航行任务下的具体场景,建立指标体系,针对指标进行解耦,建立试验数据与指标之间的数学模型。通过读取存储的试验数据,对指标进行量化计算,从而得出量化评估结果。
2.1 自主航行评价内容
针对无人船自主航行的任务科目进行划分,重点对自主循迹与自主避碰这2 项具有代表性的任务科目进行测试与评价的技术研究。
2.1.1 自主循迹测试评价方法
自主循迹的测试指标分为效能指标、功能指标与性能指标。效能指标主要指循迹总时间T;功能指标主要是指包括起始点在内的必过点穿行情况;性能指标包括:航迹偏距,航向角偏差。
将航行数据进行采样,采样频率为1 Hz。该组数据包括时间、无人船经纬度坐标、无人船航向、舵角信号。
将无人船经纬度坐标转化为直角坐标,得到位置数据(xn,yn),输入任务场景中的必过点数据(X,Y)。通过每组2 个必过点坐标,得到预计航线在此直角坐标系上的表达式:AX+BY+C=0,式中A,B,C为固定实数。
得到如下公式:
将所有航迹点数据代入对应的航迹中计算,得到航行偏差即航迹截距数组[Dn],求该组数据的平均值与均方差值MSE (Dn)。
计算每相邻航迹点形成的直线,得到Axn+Byn+C=0,式中An,Bn,Cn为固定实数。计算该直线的航向,即瞬时航向与预定航向之间的夹角,如下式:
如存在,且时间序列上不存在紊乱与重复,则认为必过点穿越成功。
2.1.2 自主避碰测试评价方法
自主避碰的测试指标分为效能指标、性能指标,效能指标主要包括总耗时T;性能指标包括时效性,避碰有效性。
在避碰规则中,当两船航向相交时,海事规则中涉及“碰撞危险”、“紧迫局面”与“紧迫危险”这3 种安全距离的概念。“碰撞危险”即为两船接近至存在碰撞危险的距离[6]。“紧迫局面”则是指两船接近至仅凭让路船的避让行动无法保证不发生碰撞的距离。“紧迫危险”是指碰撞危险即将发生的距离。3 种距离的碰撞危险程度依次增加,但海事规则中并未明确规定这些距离的具体取值[7]。因此在进行指标评价之前需要将这些距离作约定。且针对这些距离对于操作的指导做出约定。对于避碰系统评价方法,可以将上述距离简化为2 个,一个是避碰机动期间不应当到达的距离可以叫做“避碰危险距离”;另一个避碰机动应当开始时的距离可以叫做“避碰距离”[8]。
针对最常见的互见情形下的两船对遇问题,危险避碰距离可记作D1,表达如下[9]:
避碰距离可以记作D2,表达式如下:
式中:L为船舶长度,K为两船速度之比,∆δ 为两船航向交角,Da为安全距离一般取12 n mile。
1)避碰有效性评价
将无人船经纬度坐标转化为大地直角坐标,得到位置数据(xn,yn),输入任务场景中的障碍物坐标(x,y)。计算危险避碰距离D1,实时计算(每秒刷新)每组位置数据(xn,yn)与各障碍物之间的距离:
2)避碰时效性评价
了解被测对象的内在逻辑,了解其避碰的判断阈值。当观测到该值作为信号输入到避碰系统时开始计时t1,同时开始监测智能船关键部件(机桨等)信号,当监测到信号开始按照避碰操作变换时记录时间t2。计算时效性指标 ∆t=t2-t1。
3)避碰经济性评价
当障碍物出现,且智能船关键部件(机桨等)信号发生显著变化,即舵角信号出现大幅持续的脉冲信号,以及主机转速或功率有持续的明显下降时。记录避碰操作开始时刻,记作T1,并计算此时笛卡尔坐标系上的航迹表达式:Ax+By+C=0,式中A,B,C为固定实数。
当目标船驶离避碰距离D2,且智能船行驶回初始航迹Ax+By+C=0,即测试船完成复航时。记录避碰结束时刻T2。
于是,避碰过程总耗时 ∆T=T2-T1。
4)操舵频次评价
对于任务期间的指令舵角状态进行监测与数据记录,得到航行期间舵角的变化次数以及变化曲线,如图3 所示。
2.2 自主循迹任务评价实例
如图4 所示,在一片开阔水域内,对自主航行系统输入包括起始点在内的6 个必过点。根据试验船船长25 m,给定必过点穿越半径为50 m。转化经纬度坐标,将包括时间、经纬度坐标、航迹角、航向角在内的监测数据以及任务场景参数代入评价算法程序,结合自主循迹任务测评方法得到自主航行评价结果。
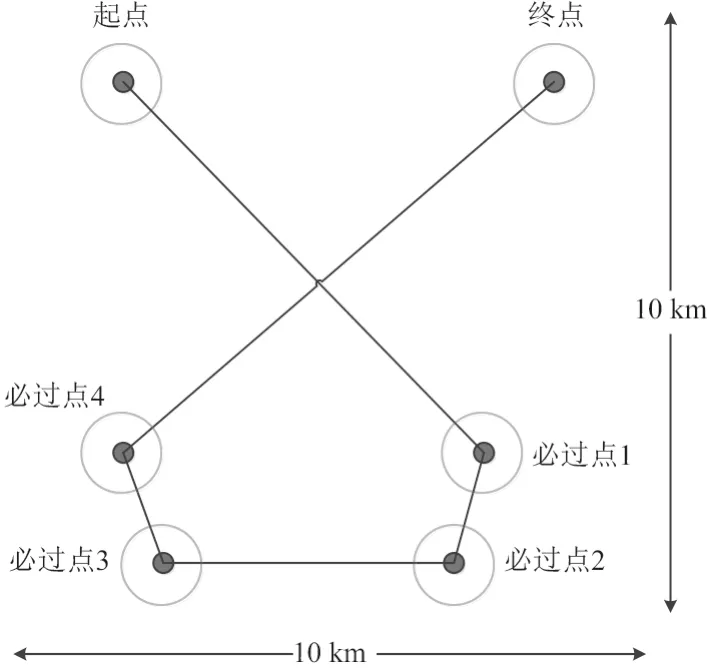
图4 无人船自主循迹试验场景示意图Fig.4 Schematic diagram of the autonomous tracking test scene of unmanned surface vehicle
将每2 个必过点之间的航迹视作一段航迹线,共得到5 段航迹线,通过与理想航迹(两必过点之间的直线)对比,得到航迹截距与航向偏差指标,如表1所示。
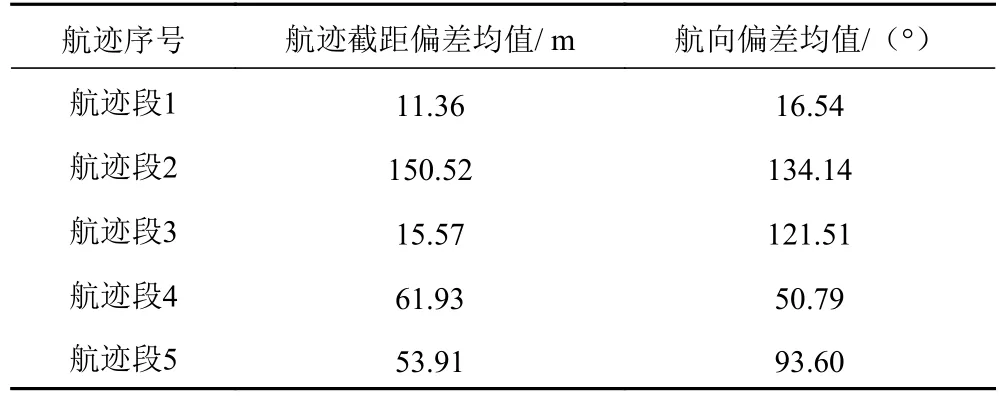
表1 自主循迹任务评价计算结果Tab.1 Autonomous tracking task evaluation calculation results
由循迹全过程中数据时间序列的总长度可知,此次自主循迹完成的总时长T为64 min。
针对每一个必过点,均有相距小于等于穿越半径50 m,因此认为循迹成功,但是距离误差(偏距)与航向角的误差较大,各航次平均偏距差值为58.7 m,各航次航向平均误差为83.3°。考虑到进行循迹测试时测试场内存在非合作障碍物,被试艇既要进行循迹试验又要对这些非合作障碍物进行避障操作,因此此次测试结果无法代表该操控系统在循迹功能上的真实水平,但是由必过点均穿越成功这一结果可以得知该操作系统能有效进行循迹操作。
3 结语
本文结合无人船自主航行实船测试需求,结合多维信息统一采集、船-岸-海协同测量与模块化设计技术提出并设计一种无人船自主航行综合监测与评价系统。在此基础之上,从功能、效能出发,构建无人船在自主循迹和自主避碰作业场景下的评价指标体系,开展自主航行试验数据与评价指标之间的数学模型构建工作,完成了对无人船自主航行性能的量化评价技术研究,为无人船自主航行的测评与后续改进提供依据。
