CEEMDAN 联合小波阈值算法在水下激光雷达中抑制散射杂波的应用*
2023-12-01樊超阳李朝锋3杨苏辉刘欣宇廖英琦
樊超阳 李朝锋3) 杨苏辉† 刘欣宇 廖英琦
1) (北京理工大学光电学院,北京 100081)
2) (北京理工大学,信息光子技术工业和信息化部重点实验室,北京 100081)
3) (中国电子科技集团公司第三十四研究所,桂林 541000)
4) (中国电子科技集团公司第二十八研究所,南京 210000)
水下激光雷达回波信号中往往含有大量散射噪声.为了能够有效抑制散射噪声,提高水下激光雷达测距精度,提出了基于自适应完备噪声经验模态分解(CEEMDAN)与小波阈值相结合的去噪新方法.首先通过相关系数法对自适应完备噪声经验模态分解得到的本征模态函数(IMF)进行筛选;然后对筛选后的本征模态函数进行小波阈值去噪,进一步去除本征模态函数中的噪声成分;最后将去噪后的本征模态函数进行信号重构得到去噪后信号.将该方法应用到不同衰减系数水体的强度调制连续光水下测距实验,使用白色聚氯乙烯(PVC)反射板为探测目标,在3.75 个衰减长度时,直接采用相关极值确定延时,测距误差达到19.2 cm;应用该方法处理后,测距误差减小到6.2 cm,有效提高测距精度.
1 引言
海洋是地球环境的重要组成部分之一,对海洋资源的探测是研究和开发海洋资源的前提.长久以来,声纳探测一直在海洋探测领域中占据主导地位[1,2].然而声纳系统的载波为声波,声波传输速度慢、易受干扰,且必须与水直接接触的特性大大降低了声纳系统的工作效率.与之相比,激光雷达以激光为载波,有更高的成像分辨率和抗干扰能力,并且激光雷达系统结构紧凑,可以舰载、机载或星载,在大范围水下探测时具有更高的工作效率[3–5].
由于海水的强散射作用,水下激光雷达的探测信号中包含大量的散射杂波噪声,极大地影响了系统探测距离和精度[6,7].目前,载波调制技术已被验证具有良好的抑制海水散射杂波的噪声的能力,其利用目标调制频率高于海水调制频率的特点,通过高频调制与解调去除海水散射噪声[8,9].然而,在较为浑浊的水域,即使经过相干解调后,回波信号中仍包含大量的散射噪声,剩余的散射噪声会导致激光雷达的测距精度下降[10,11].因此需要对探测回波信号进行进一步滤波,抑制散射噪声才能提取有效目标信息.
为了有效去除水下激光雷达回波信号中的散射噪声,提高测距精度,本文提出了一种自适应完备噪声经验模态分解(CEEMDAN)联合小波阈值的信号去噪算法.CEEMDAN 可以自适应地将信号分解为若干本征模态函数(IMF),并将其按从高频到低频的顺序排列[12].小波阈值去噪根据原始信号经小波变换后噪声成分与信号成分在小波系数中的分布不同,在小波变换域实现信号与噪声的有效分离[13,14].联合算法通过相关系数法筛选CEEMDAN 分解得到的IMF 分量,部分筛选后的IMF 分量中仍包含大量噪声,对筛选后的IMF分量进行小波阈值去噪,再将去噪后的IMF 分量重构得到最终去噪信号.CEEMDAN 联合小波阈值去噪算法对CEEMDAN 分解得到的多个IMF分量分别使用小波阈值去噪算法做进一步去噪处理,针对不同IMF 分量分别应用小波阈值去噪算法处理可以有效去除CEEMDAN 分解后部分重构方法无法去除的噪声成分.使用根据不同IMF分量特性计算出的阈值门限分别进行小波阈值去噪处理,改善了直接使用小波阈值去噪处理时选取单一的阈值门限难以适应所有信号的问题,使算法具有一定的自适应性,可以更加方便有效地去除信号中的噪声成分.通过实验证明,将该算法应用到水下激光雷达信号处理中可以显著提高测距精度.
2 实验原理
2.1 小波阈值去噪原理
小波变换是一种多尺度信号分析方法,为信号去噪提供了强有力的工具.观测信号x(t) 经小波变换后,噪声成分的能量主要集中在高频部分,且比较均匀地分布在个数较多但幅值较小的小波系数上,而有效信号成分的能量则集中分布在少数几个幅值较大的小波系数上[13].信号的小波系数值大于噪声的小波系数值.因此在小波变换域能够实现信号与噪声的有效分离.
小波阈值去噪的基本原理是选择合适的小波基和分解层数对原始信号x(t) 进行小波变换,得到小波分解系数Wj,j表示小波分解层数.分解得到的小波系数Wj由两部分构成: 一部分是有效信号对应的小波系数Uj,另一部分是噪声对应的小波系数Vj,则
设置一个临界阈值λ对小波系数Wj进行阈值处理,得到Wj的估计值,使得‖-Uj‖达到最小.使用进行小波重构,得到估计信号即为去噪之后的信号.阈值λ的幅值应刚好大于噪声系数的最大幅值,本文使用Donoho 和Johnstone[15]给出的阈值门限:
式中,N为采样信号的长度;σ为噪声方差的估计值,σj=median(|Wj|)/0.6745 ,其中median(|Wj|)为第j层分解的小波系数细节部分的中位值.
小波阈值处理有硬阈值和软阈值两种方法[16],硬阈值函数表达式为
式中,sgn(⋅)为符号函数,λ为阈值.
这两种方法虽然应用广泛,但方法本身存在潜在的缺点.对于硬阈值函数,在±λ处不连续,容易导致重构信号产生震荡;而对于软阈值函数,虽然是连续的,但是当 |Wj|>λ时,与Wj存在恒定偏差,直接影响重构信号与真实信号的逼近程度.
为了克服硬阈值函数和软阈值函数存在的问题,采用二次多项式插值法构建新的阈值函数,其模型为
显然,用二次多项式插值法确定的阈值函数在整个定义域内都是连续的,克服了硬阈值函数不连续的问题;并且当 |Wj|≥t时,是无偏的,弥补了软阈值函数的不足.该阈值函数波形如图1所示.
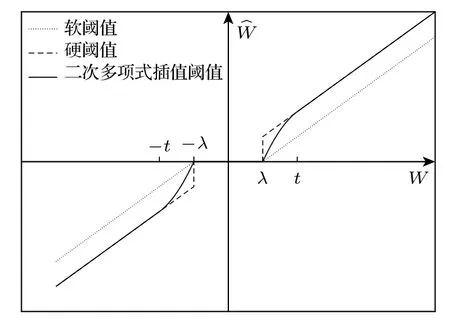
图1 各种阈值函数比较图Fig.1.Comparison of various threshold functions.
2.2 CEEMDAN 算法
经验模态分解(EMD)是Norden 等[17,18]在瞬时频率概念的基础上提出的一种特别适用于非线性、非平稳信号的分析处理方法.为了解决EMD方法模态混叠的问题,Wu 和Huang[19]对EMD 方法进行优化,提出了集合经验模态分解(EEMD).该算法在原始信号中加入同等幅值的高斯白噪声得到多组信号,之后分别对EMD 得到的对应IMF分量平均来抵消加入的白噪声,抑制了EMD 方法模态混叠的问题,但重构信号包含残余噪声.
CEEMDAN 是Torres 等[12]在EMD 和EEMD的基础上提出的一种新的信号分解方法.该算法通过在分解的每个阶段添加自适应白噪声,较好地解决了EMD 存在模态混叠以及EEMD 存在残余噪声的问题.CEEMDAN 算法过程如下.
1)假设x(t) 为原始 信号,ωi(t) 是第i次添加的白噪声,向原始信号多次添加白噪声,构造出一系列待 分离信 号,xi(t)=x(t)+σ0ωi(t) ,i=(1,2,···,N),σ0代表噪声的标准偏差.
2)对每个xi(t) 进行EMD 分解,获得N个待分离信号的第一个IMF 分量,将得到的N个IMF分量求平均值,作为CEEMDAN 分解得到的第一个本征模态函 数IMF1.若定义算子Ej[·] 表示经EMD 分解产生第j个IMF 分量,则
原始信号x(t) 减去第一个本征模态函数IMF1,得到第一个余量r1为
3)对高斯白噪声ωi(t) 进行EMD 分解得到自适应噪声,将分解得到的自适应噪声添加到余量中,得到新的待分离信号为
式中σk-1表示求解 IMFk时添 加噪声的幅值.对xi(t)′执行步骤1)和步骤2)中的操作,可得CEEMDAN分解得到的第k个本征模态函数 IMFk和第k个余量为
4)判断余量rk的极值点个数是否小于2.若rk的极值点个数小于2,则表明对原始信号x(t) 的CEEMDAN 分解结束.若rk的极值点个数大于2,则重复步骤3)继续分解,直到rk的极值点个数小于2 为止.最终,原始信号被分解为k个IMF 分量和一个余量.
信号经过CEEMDAN 分解后,各IMF 分量按瞬时频率由高到低排列,选择特定的IMF 分量叠加重构信号,可实现低通、高通和带通滤波器的效果[20].该方法完全由数据驱动,具有较强的自适应性.但是有些IMF 分量,尤其是高频IMF 分量往往同时包含信号和噪声成分,直接舍弃该部分IMF 分量在去除噪声的同时也存在损失有效信号的风险.
2.3 CEEMDAN 联合小波阈值信号处理方法
CEEMDAN 和小波阈值去噪方法各有其优缺点,相互间有一定的补充,本文结合两种方法进行联合降噪,方法流程如图2 所示.首先对原始信号应用CEEMDAN 分解算法,得到若干IMF 分量,计算各IMF 分量与原始信号之间的相关系数,当IMF 分量中噪声含量较多时,相关系数会偏低.本文选择舍弃相关系数小于0.3 的IMF 分量,对余下的与原信号具有高相关性的IMF 分量使用sym4小波基函数和上文所述阈值函数进行小波阈值去噪处理,进一步去除信号IMF 分量中的噪声成分.相关系数计算公式为

图2 方法流程图Fig.2.Method flowchart.
以某次实验中测量的数据为例,用CEEMDAN联合小波阈值去噪方法对该数据进行处理,验证该方法的可行性.图3 显示了衰减系数为2.5 m–1时,光电倍增管(PMT)检测到的1 m 远处漫反射目标回波信号及其频谱图.衰减系数表示单位距离内水体对光信号功率的衰减值,光在水中的衰减遵循比尔-朗伯定律,若在距离水箱入口r1,r2处目标的回波强度分别为
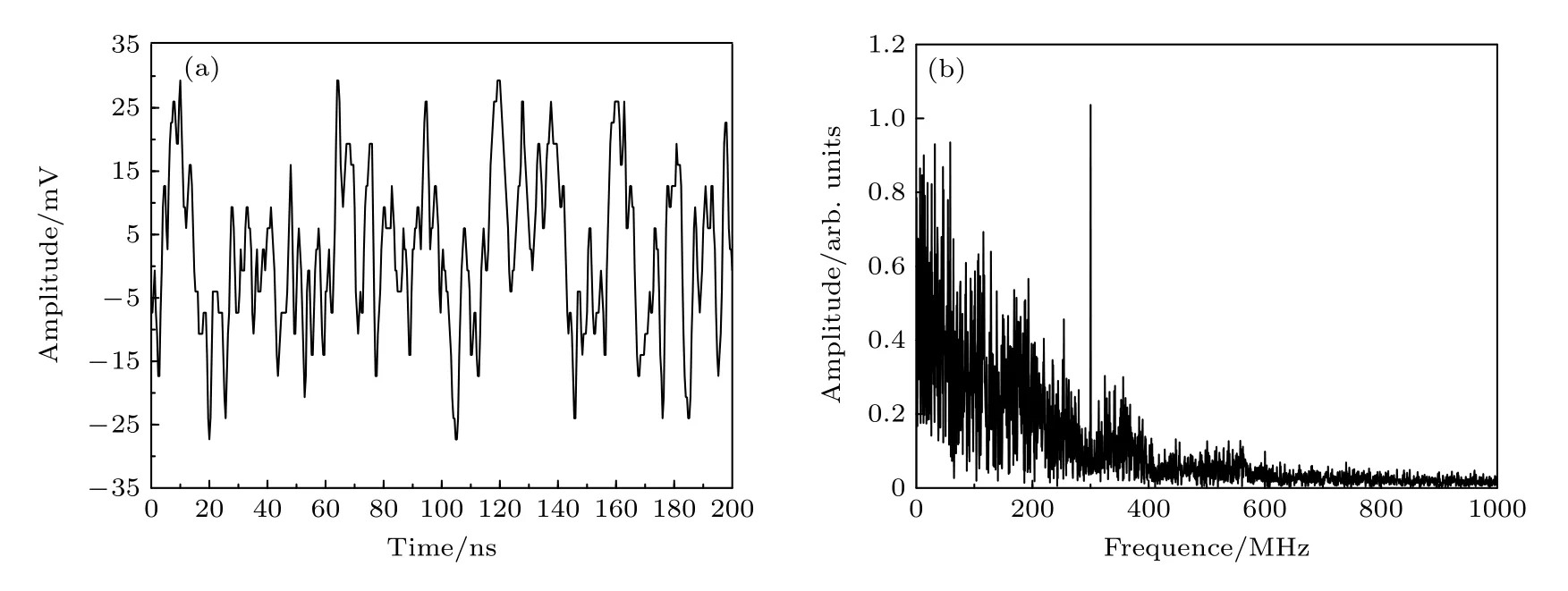
图3 目标回波信号的波形和频谱图 (a) 波形图;(b) 频谱图Fig.3.Waveform and frequency spectrum of target echo signal: (a) Waveform;(b) frequency spectrum.
式中,I0为入射光光强,α为水箱入射窗口透过率,β为探测目标反射率.则水箱中水体的衰减系数为
由于水体的衰减和散射作用,原始信号十分微弱且包含大量的散射噪声.对原始信号用CEEMDAN分解算法,信号分解为9 个IMF 分量和1 个残差分量,各个IMF 分量的波形如图4 所示.各IMF分量与原始信号相关系数分别为: 0.3258,0.4493,0.5491,0.6159,0.3987,0.2498,0.2160,0.1399,0.0548.结合图4 波形可以看出,当相关系数小于0.3 时,IMF 分量损失了绝大部分高频分量,且与原始信号的相关性较差.对相关系数高于0.3 的IMF 分量进行小波阈值去噪处理,将去噪后的IMF 分量叠加重构得到最终信号,信号波形和频谱如图5 所示.从信号波形和频谱图可以看出,原始信号中的散射噪声得到了很好的抑制,去噪后的信号可以用于随后的测距计算.
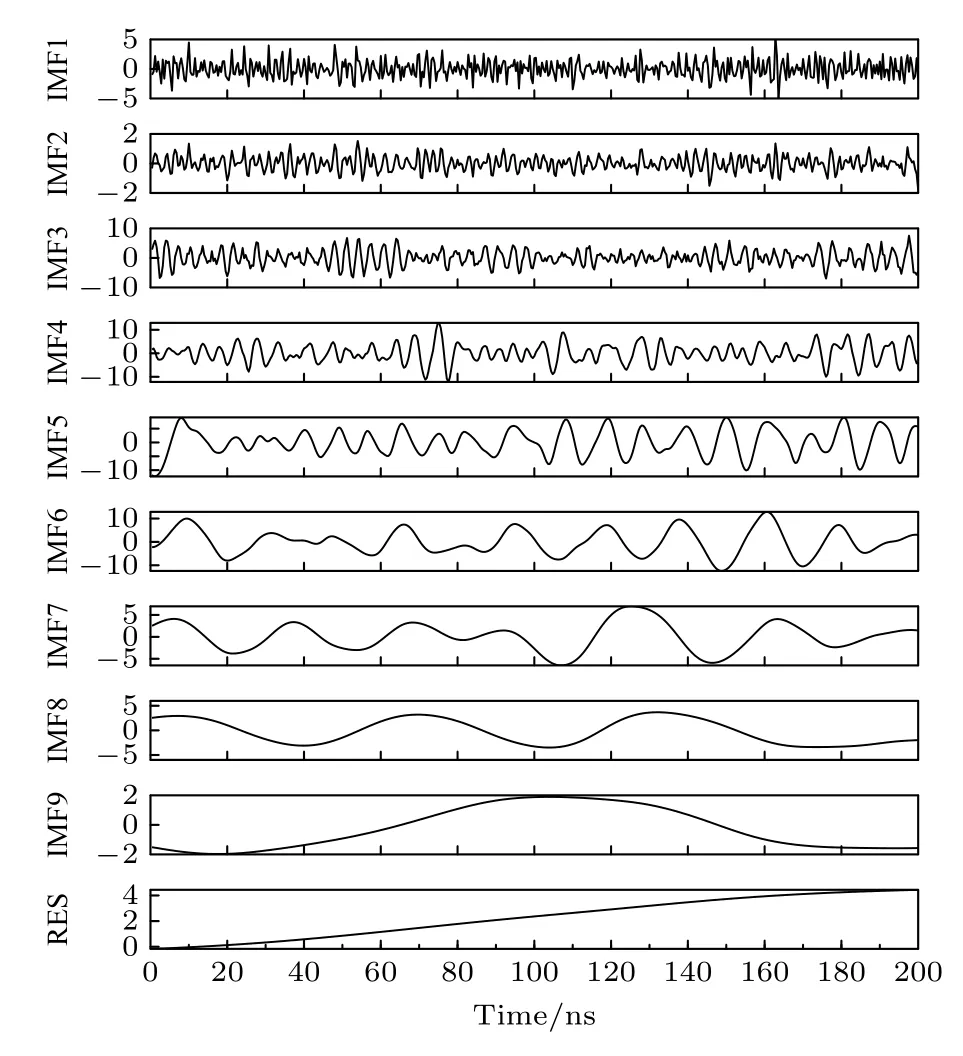
图4 目标回波信号分解得到的IMF 波形图Fig.4.IMF waveform of target echo signal decomposition.

图5 去噪后信号的波形(a)和频谱(b)图Fig.5.Waveform (a) and frequency spectrum (b) of the signal after denoising.
3 实验分析
3.1 实验系统
实验采用532 nm 啁啾强度调制激光器作为光源,该激光器调频范围为10 MHz—2.1 GHz,最大输出功率为2.56 W.图6 显示了实验装置示意图,准直后的激光入射到内径0.4 m,长度3 m 的水箱中,水箱内放置了一条轨道,用以将目标固定在水箱中的不同位置.实验使用白色PVC 板模拟水下漫反射目标,通过向水中加入Mg(OH)2的方法改变水体的衰减系数.反射信号经接收透镜聚焦后由PMT 探测器采集,使用数字示波器完成PMT输出的回波信号和信号发生器输出的相同频率参考信号的采样,计算回波信号与参考信号互相关函数,通过互相关函数峰值位置确定目标距离.

图6 激光水下探测实验系统Fig.6.Laser underwater detection experimental system.
3.2 实验测距结果与分析
为了验证CEEMDAN 联合小波阈值方法的有效性,本文分别在水体衰减系数为1.5 和2.5 m–1时,将反射目标放置在距离水箱入射平面0.5,0.75,1,1.25,1.5 m 五个位置进行测距实验,调制频率设置到 200 MHz和300 MHz.分别对原始信号单独应用小波阈值去噪算法处理、相关系数法筛选IMF 分量的CEEMDAN 部分重构信号处理以及CEEMDAN 联合小波阈值算法处理,分别使用原始信号和3 种算法处理后的信号计算目标距离,测距结果如图7 所示.当未经算法处理时,原始信号中包含大量散射噪声,测距结果存在明显误差.单独使用小波阈值去噪算法处理和CEEMDAN 部分重构信号处理可以在一定程度上抑制信号噪声,但测距结果仍存在较大的误差.应用CEEMDAN联合小波阈值算法处理后,信号噪声得到了明显抑制,测距误差显著降低.
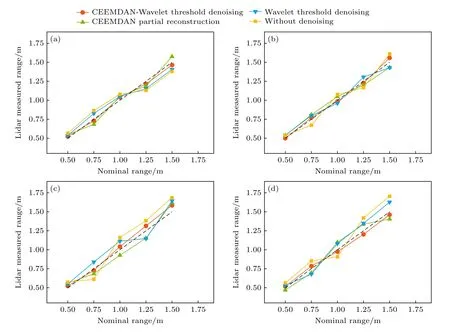
图7 不同衰减系数和调制频率下的测距结果 (a),(b) 衰减系数c=1.5 m–1,调制频率分别为200 MHz 和300 MHz 时的测距结果;(c),(d) 衰减系数c=2.5 m–1,调制频率分别为200 MHz 和300 MHz 时的测距结果Fig.7.Ranging results under different attenuation coefficients and modulation frequencies: (a),(b) Ranging results when the attenuation coefficient is c=1.5 m–1 and the modulation frequency is 200 MHz and 300 MHz;(c),(d) ranging results when the attenuation coefficient is c=2.5 m–1 and the modulation frequency is 200 MHz and 300 MHz.
为总结不同衰减系数下的测量数据,图8 展示了不同衰减长度下的测距误差.在未经算法处理的情况下,测距误差随着衰减长度的增加急剧增加,在3.75 个衰减长度(3.75 a.l.)时,测距误差达到了19.6 cm.单独使用小波阈值去噪算法处理和CEEMDAN 部分重构信号处理后,测距误差分别为10.8 cm 和13.5 cm,应用CEEMDAN 联合小波阈值算法处理后,测距误差下降到6.2 cm.实验结果表明,CEEMDAN 联合小波阈值算法有效抑制了散射噪声对测距精度的影响,大大提高了水下激光雷达的测距精度.
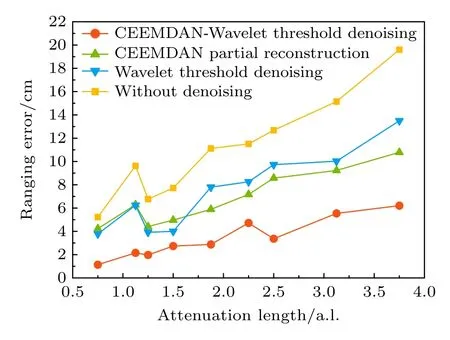
图8 不同衰减长度下的测量误差Fig.8.Ranging errors at different attenuation lengths.
该方法在水体散射较强,水下激光测距噪声明显的情况下效果优异.在实际应用中还应考虑算法耗时等问题,目前该算法耗时在百毫秒量级,将其优化,可以减少耗时,节约计算资源,以更好地抑制水下激光雷达中的散射杂波.另外需要注意的是小波分解应该在较宽带信号下进行,所以对探测信号的带宽有一定的要求,该方法适用于对高频调制信号的处理.
4 结论
本文将CEEMDAN 与小波阈值去噪算法结合起来,提出了一种新的水下激光雷达回波信号散射噪声去除方法.该算法使用相关系数法筛选CEEMDAN 分解得到的IMF 分量,对筛选后的IMF 分量使用小波阈值去噪算法做进一步去噪处理,有效去除了使用CEEMDAN 部分重构信号处理方法无法去除的噪声成分,同时改善了单独使用小波阈值去噪算法处理时单一阈值门限难以适应不同信号的问题.使用PVC 反射板为目标,532 nm强度调制连续波激光作为光源,在水体衰减系数为1.5 和2.5 m–1条件下,对不同距离水下目标进行测距实验.对原始信号分别应用小波阈值去噪算法处理、相关系数法筛选IMF 分量的CEEMDAN部分重构信号处理以及CEEMDAN 联合小波阈值算法处理,分别使用原始信号和3 种算法处理后的信号计算目标距离,并进行比较.实验结果表明,CEEMDAN 联合小波阈值算法在不同调制频率,不同衰减系数介质中均取得了更好的测距结果,在3.75 个衰减长度时,该算法将测距误差从19.6 cm降低到6.2 cm,有效提高了测距精度,抑制了水体散射杂波对水下激光测距精度的影响.
