M701F4 重型燃机负荷控制模式浅析
2023-11-30唐宝华席建忠
唐宝华 席建忠
(杭州华电江东热电有限公司)
0 引言
M701F4 重型燃机主要通过调节机组的燃料给定(CSO) 来改变机组的负荷, 其调节系统主要由一个通过最小门选择的多个控制回路组成。这些控制回路的输出经小选后再与最小CSO 大选作为机组的主控输出。GVCSO 和LDCSO 分别为机组的转速和负荷控制回路的输出指令, 运行人员可选择机组投入转速调节(GOVERNOR)或负荷调节(LOAD LIMIT) 模式。选择一个模式时, 另一个模式会自动退出控制并加上一个偏置后作为备用,这样可使机组在电网频率突升时快速降低燃料供应防止转速飞升, 而在电网频率突降时不会增加燃料过快而导致机组热通道温度变化过大造成损坏。
1 负荷自动控制(ALR CONTROL)
1.1 系统概述
M701F4 重型燃机为了实现机组负荷的自动控制,设计了一个自动负荷控制回路(ALR CONTROL) 来实现机组负荷的自动增减。这是一个闭环的无差调节回路,它位于负荷控制和转速控制回路的上层, 负责将机组的负荷指令(ALR SET) 自动传送到转速和负荷控制回路中以实现控制, 这个回路可由运行人员手动投切。机组投入负荷自动控制(ALR ON) 时, 自动负荷控制回路的负荷指令将送到转速和负荷控制回路中参与控制, 退出负荷自动控制(ALR OFF) 时, 机组根据操作员设定的负荷指令进行GVCSO 和LDCSO 计算。实际上机组并网后可有4 种负荷控制模式: 投入负荷自动控制的负荷调节模式(ALR ON & LOAD LIMIT)、投入负荷自动控制的转速调节模式(ALR ON&GOVERNOR)、退出负荷自动控制的负荷调节模式(ALR OFF & LOAD LIMIT)和退出负荷自动控制的转速调节模式(ALR OFF &GOVERNOR)。负荷自动控制逻辑简图如图1 所示。
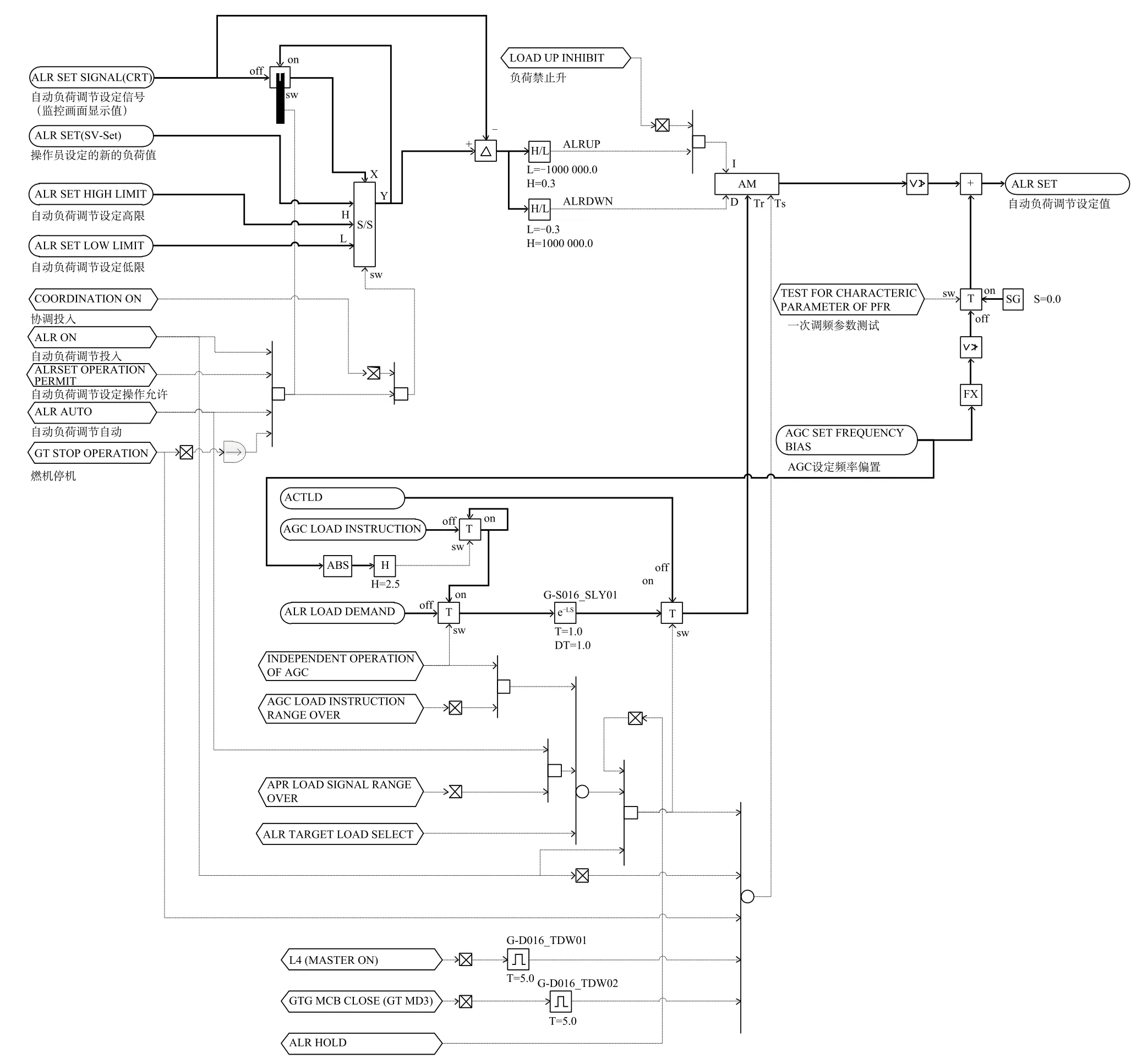
图1 燃机负荷自动控制原理
1.2 AGC 与一次调频
从图1 中可以看出, 负荷指令(ALR SET) 在送给转速和负荷控制回路前, 还叠加了一个被限速的频率偏差值(AGC SET FREQUENCY BIAS) 函数, 频率偏差值计算公式为(GT SPEED/60 -50)*60。在转速控制回路中, 机组转速与转速给定值的差值直接进入纯比例环节计算后即得到GVCSO 值, 进而控制燃料调节阀动作, 中间没有死区限幅限速等环节, 因此其调节速度非常快, 基本可在机组TCS 控制系统的1 个运算周期(50ms) 之内完成, 这类似于常规汽轮机的DEH 侧一次调频。相对而言, 自动负荷控制回路中的频差在加到功率给定上后, 需经一个限速环节按照一定的速率改变机组的功率或转速调节设定值,因此, 其一次调频的响应速度就会慢很多, 这类似于常规汽轮机的CCS 侧一次调频。
另外, 机组投入AGC 时也是将AGC 指令送到自动负荷控制回路中并通过该回路进入转速和负荷控制回路, 换言之, 机组AGC 投入时必须投入自动负荷控制回路。综上所述, 机组在三种模式下都具有一次调频的功能, 分别是投入自动负荷控制的负荷调节模式、投入自动负荷控制的转速调节模式和退出自动负荷控制的转速调节模式, 这三种模式的调频功能会在转速控制和负荷控制里面具体分析。
2 转速控制(GVCSO)
2.1 转速控制模式介绍
当选择转速控制模式时, 负荷控制模式会自动退出并加上一个5%的偏置作为备用。转速控制方式表面上看是以增减燃机转速为目的来控燃料量的增减,但是因为发电机并网运行, 燃机转速在燃料投入量适当增减时不会变化, 而燃料增减时会直接改变燃机输出功率, 进而达到了调节发电机输出功率的目的。比如当AGC 负荷指令大于发电机实际发出的功率时,ALR 接受到AGC 指令后比较判断出AGC 指令大于实际功率, ALR 就会发出升负荷指令, 转速控制模块就会将升负荷指令转变为升转速指令, 增加燃料量, 但机组转速受限于电力系统固有频率而不会轻易改变,所以GVCSO 开始变大, 控制燃料投入量增加, 最终增加了发电机的输出功率。当输出功率等于AGC 指令时,ALR 发出负荷保持指令, 转速控制模块维持燃料量不变, 至此升负荷过程结束。在升负荷过程中如果燃机转速确实有增长, 则GVCSO 控制燃料量的增加速率会马上减小, 从而保证了升负荷过程中燃机转速的稳定, 这也就是转速控制的优点。转速控制策略图如图2 所示:
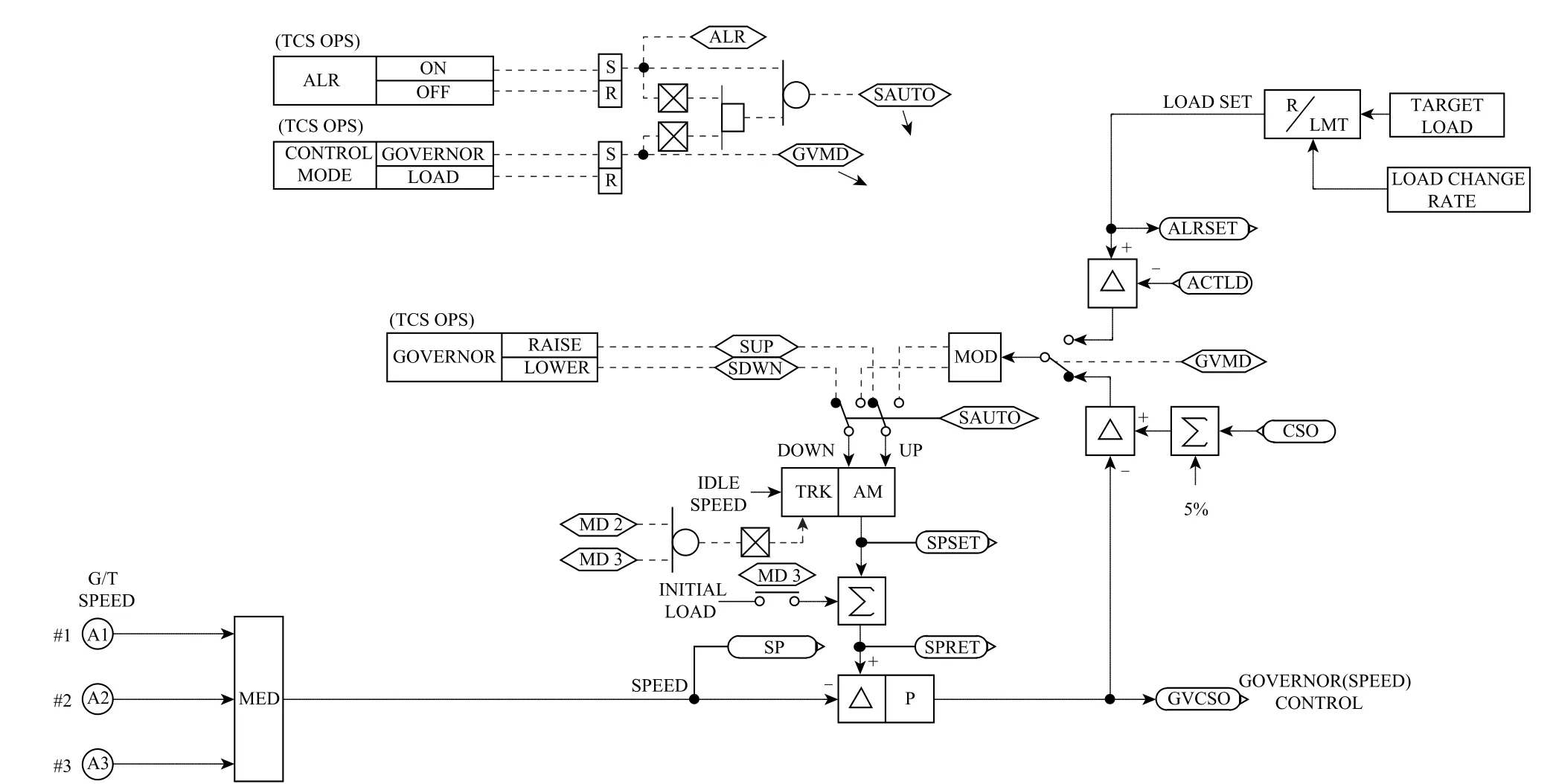
图2 转速控制策略框图
从图2 可以看出, 当SAUTO=0 时, 转速设定值由运行人员设定, 此时机组具有一次调频功能; 当SAUTO=1&GVMD=1 时, 负荷自动回路会把负荷设定值ALR SET 和实测负荷的偏差转换成增减转速设定值的指令, 机组也具备一次调频功能。转速调节是以转速设定值SPREF 与实测转速SPEED 的差值Δn作为调节信号, 来改变燃料阀的开度, 从而控制机组的转速, 它是一个纯比例环节, 只要转速偏离给定值(Δn≠0), 调节系统立即响应直到Δn =0, 调节过程才结束。此种调节方式响应快, 并且具有很强的抗内扰能力, 但精度不高, 且容易产生振荡。转速控制GVCSO 的计算公式为:
(1) GVCSO=(SPREF-SPEED/30)*GV GAIN+NO LOAD CSO
(2) 其中: SPREF = SPSET +100, 正常情况下SPSET 的范围为( -4, 6), 做超速试验时SPSET 的范围为( -4, 12);
(3) GV GAIN 为调速器增益, 在假设燃料全部为气体的情况下, 满载时燃料输出指令为80%、空载燃料指令为24%, 不等率为5%, 其计算公式为GV GAIN=(80% -24%)/5=11.2%, 燃油工况下, 满载时燃料输出指令为84.6%、空载燃料指令为27.2%, GV GAIN=(84.6% -27.2%)/5 =11.48%。
(4) NO LOAD CSO 为燃气轮机的空载燃料信号,燃气工况时设定值为24%, 燃油工况时设定为27.2%。
2.2 正常启动各阶段GVCSO 的变化
正常启动包括LDON (点火升速)、MD2 (全速空载)、MD3 (并网带负荷), 下面我们分析各个阶段GVCSO 的变化。
(1) 在LDON 为零时, 跟踪信号Ts 为1, SPSET=0.266, 所 以SPREF = (100 + 0.266) *30, 约 为3008rpm。SPSET 加上100 后为100.266, 减去实际转速百分比得到偏差值INPUT, 对该偏差进行比例调节。在此期间, GVCSO 的大小会由100%慢慢降为24%。
(2) 在MD2 时, 跟踪信号Ts 为0。此时操作员使同期装置投入自动, 自动同期装置则会根据同步并网的要求分别产生SPEED UP 和SPEED DOWN 的信号, 使SPSET (转速设定值) 以一定的斜率增减, 从而实现发电机频率与电网频率的匹配。
(3) MD3 时, 并网后一个计算周期内, Ts 信号会跟踪Tr 的值, 此时Tr 是在SPSET 的基础上加0.1 的值,GVCSO 使机组升负荷至初始负荷21MW。一个计算周期后跟踪信号为0, GVCSO 工作状况则与MD2 时相同。
2.3 非正常工况下各阶段GVCSO 的变化
以上分析了燃机正常启动过程中转速指令GVCSO 的变化情况, 下面再来分析非正常工况HOUSE LOAD、RUNBACK 时GVCSO 的变化。
(1) 当GT HOUSE LOAD OPERATION (孤岛运行) 条件触发时, 燃机控制模式将由负荷控制切换至转速控制。HOUSE LOAD 信号出现的同时会触发GT LOAD RUN BACK (快速降负荷), LOAD RB (MOMENT) 信号让转速AM 模块的跟踪信号Ts 为1,HOUSE LOAD 信号则让跟踪值Tr 选择为0.25 (计算公式为5.0/100.0 *GT SPEED REGULATION, GT SPEED REGULATION 为常数5.0), 两者共同作用使GT SPSET 迅速减小为0.25, 而HOUSE LOAD 触发时燃机转速又会迅速升高, 这样燃机转速设定值与实际值之间就会产生一个很大的差值, 根据GVCSO 的计算公式可知, GVCSO 会急剧减小至MIN (CSO)19.2%以下。所以, 在相当长一段时间内, 当CSO 的小选输出值小于MIN (CSO) 时, 燃机输出CSO 将一直保持19.2%不变。随着转速的缓慢下降, GVCSO会不断增大, 最终将会取代MIN (CSO) 成为主CSO输出。
(2) 当GT LOAD RUN BACK 信号触发时, 因受到LDCSO TRACKING COMMAND AVAILABLE (负荷控制的跟踪信号) 限制(该信号始终为OFF), 所以RB 信号并不会让转速的AM 模块跟踪。
3 负荷控制(LDCSO)
当选择负荷控制模式时, 转速控制回路会自动退出并加上一个5%的偏置作为备用。负荷控制方式为闭环无差调节, 适用于带负荷运行工况下的负荷控制, 与转速控制互斥, 其控制策略图如下。
从图3 可以看出, 当LAUTO=0 时, 功率设定值由运行人员手动设定, 此时机组没有一次调频功能, 当LAUTO=1&&GVMD=0 时, 负荷设定值LDREF 则是由自动负荷回路ALR SET 的值经限速后给定, 机组也具备一次调频功能。负荷调节是以负荷设定值LDREF 与实测负荷LOAD 的差值Δn 作为调节信号, 因为引入了积分环节, 所以负荷调节提高了系统的无差度, 但是响应速度也会变慢。
燃机在升速阶段且尚未并网时, LDON 为0 时, 负荷设定AM 模块处于跟踪模式, 此时LDSET=20MW, 负荷调节模块PIQ 也处于跟踪模式, LDCSO=60%, 所以其不可能通过最小选门。同步时LDSET 为下限值20MW(初始负荷), 等到GVCSO 使机组并网带初负荷后,LDON 信号变为1, 此时燃机转由LDCSO 进行控制。
在负荷控制方式下若选择ALR ON 模式时, LDSET 会以20MW/min 的速率跟随ALR SET 的值, 当ALR SET 与LDSET 偏差大于0.3 时会给LDSET 的AM模块发增指令, 偏差小于-0.3 时发减指令, 当机组检测到负荷设定值LDSET 与一阶滤波后的负荷实际值ACTLD 有偏差时, PIQ 模块会进行比例积分调节来控制LDCSO 的大小, 从而达到控制负荷升降的目的。机组并网带负荷后, 在温度控制还没有投入的前提下,频率/负荷调节才能发挥作用。此时无论机组处于何种模式下运行, 另外一种模式都会对此进行跟踪。
为了保护机组热通道, 减小热冲击, 对负荷控制回路的升速率增加了限制。在燃机负荷为218 MW 以下时, 负荷升速率为18.3 MW/s; 负荷245MW 以上时, 负荷升速率速率为16 MW/s; 机组负荷在330 MW 以上时, 负荷升速率位20 MW/s 左右。
4 控制模式特点
在投入负荷自动控制的转速调节模式下, 调频动作分以下三种情况:
(1) 电网频率升高, GVCSO 下降未超过5%, 控制方式保持为LDCSO 控制;
(2) 电网频率升高, GVCSO 下降超过5%, 控制方式由LDCSO 切换为GVCSO 控制;
(3) 电网频率降低, GVCSO 上升, 控制方式一直为LDCSO 控制。
在投入负荷自动控制的负荷控制模式下, 机组由LDCSO 控制, 电网频率的升高导致转速突升时,GVCSO 也会有一个突降的过程, 只要突降的幅度不超过5% (负荷控制方式时, GVCSO 指令是在CSO基础上加5%跟踪), 此时GVCSO 仍然大于LDCSO,转速控制未介入。转速扰动时, 自动负荷控制指令ALRSET 立刻产生阶跃, 被置为理论的调频负荷, 而负荷控制回路目标值LDSET 则由于限速环节的作用,按照一定速率降到这个理论的调频负荷, 机组负荷也基本跟随这个目标值降低, 调节基本没有偏差。转速下降扰动时的动态响应情况与转速上升扰动类似, 在扰动过程中GVCSO 突升, 而后机组在负荷控制回路作用下逐渐提升负荷, 然后慢慢达到理论调频值。
当电网频率升高造成GVCSO 减少超过5%时, 此
投入负荷自动控制的负荷控制模式下的调频类似于AGC 动作, 其响应速度最慢, 但调频可实现无差,机组功率稳定, 对机组的扰动小。频率波动大时该方式调频效果较差。退出自动负荷控制的负荷控制方式是直接通过增加燃料量来改变燃机输出功率进而改变发电机输出功率。在升降负荷时不受燃机转速的反馈影响, 所以升降负荷快速平稳, 这是负荷控制的优点,但发电频率是电能质量的主要指标, 负荷控制(LOAD LIMIT) 这种不直接引入转速反馈的控制方式无法快速有效的调整发电机频率就成为了它的一大缺点。
5 结束语
我厂的M701F4 重型燃机在国内投入商业运营时间也有近十年了, 但对其控制理论的了解深度做的还不够, 希望通过本文能与同行进行沟通, 互相学习,以更好地了解M701F4 重型燃机的控制理念, 对今后的自主化逻辑优化建立基础。由于作者的能力有限,文中有不足之处还请读者海涵。
