农用机械多规格板件分拣机器人工作站视觉系统设计*
2023-11-28边臻涛王红娥郑玉寅李一凡
向 亮 ,边臻涛 ,王红娥 ,郑玉寅 ,李一凡
(武昌工学院智能制造学院,湖北 武汉 430065)
农用机械上有各种安装板件,在传统的安装中,都是靠人力去辨识,再拿到不同的安装工位进行安装。这样的人工分拣效率低下,难免会因工人疲劳、分神等各种原因导致工作精度不高,较易产生失误的问题。近年来,随着科技水平的不断提高,世界正处于新型工业化的浪潮之中,而机器人工程作为新型工业化最主要的趋势,机器人产业的需求也不断扩大。机器人可以运用到农用机械零件分拣的过程中,可以利用机器人智能化的特点来代替人工操作[1-4]。因此针对这一现象,展开农用机械多规格板件分拣机器人工作站视觉系统设计课题的研究,依靠机器人视觉来识别多规格板件,并用机器人工作站来完成多规格板件的分拣工作。机器人视觉系统对不同形状的板件一一识别,并通过机器人通信将识别结果反馈给机器人,最后机器人通过末端操作器对已识别的板件进行抓取分拣,把不同规格的板件放入相应的采集框中。通过农用机械多规格板件分拣机器人工作站视觉系统设计来达到使用机器人工作站代替人工分拣多规格板件,并提高分拣多规格板件的准确性和效率的目的,进一步提高生产能力。
1 农用机械多规格板件分拣工作站总方案
工业机器人视觉系统可分为两大核心部分,即机器人控制部和视觉控制部。机器人控制部是对机器人进行控制,视觉控制部则要同步控制摄像部和图像处理部,多个部门紧密配合、相辅相成,借助机器人视觉系统来搜集相应的数据和信息,经过处理之后及时传输到下一环节中[3-6]。
为了实现对三种板件的分拣,设计的工作站需要有视觉系统来识别三种板件,通信系统来链接机器人和视觉系统,工业机器人对板件进行夹取分拣,最后用三个收集箱来分装三种板件。农用机械多规格板件分拣工作站总方案如图1 所示。

图1 农用机械多规格板件分拣工作站总方案
2 视觉系统方案
视觉系统是整个工作站最重要的部分之一,要实现对三种板材的识别,对工业相机所拍摄的图像进行采集和处理等操作。多规格板件分拣工作站视觉系统方案如图2所示。

图2 多规格板件分拣工作站视觉系统方案
3 视觉系统硬件方案
设计的视觉系统硬件部分需要有系统触发、拍照摄像、图像采集等功能。系统触发需要用传感器,当板件到达传感器感应范围时,传感器会输出一个信号给视觉系统,触发视觉系统中的相机工作,相机对下方板件进行拍照摄像,上传图像到视觉系统,视觉系统对上传的图像进行图像识别和图像预处理。机器视觉需要有实用性和性价比,同时要有通用的工业接口,有较高的容错率和安全性,能够在复杂的环境下工作[7]。视觉导航线路跟踪机器人需要利用图像处理技术,通过摄像机对线路进行检测[8-9]。而且因为系统安装在生产线上,相机检测速度需要与生产线上的检测速度保持同步,相机拍照需要精确且能够抓拍到移速较高的板件[9-10]。本工作站的工业相机选用ME2L-161-61U3M 水星二代Lite 160 万像素黑白工业相机。同时,配套工业镜头选用的是大恒图像HNP-5028-6M-C1/1.8 型号工业镜头,为了实现高效照明,光源选择FH-RI15045 LED 环形光源,最后工作站所需传感器选择M18漫反射式光电传感器。
4 视觉系统软件方案
本工作站视觉系统通过HALCON 软件编写程序,对三种规格板件的图像进行采集和预处理,并对图像进行识别并将结果显示出来。
具体流程如下:先进行相机标定,完成相机标定之后,相机对待采集的板件进行拍照,采集图像,当采集的图像质量符合图像识别标准时,用HALCON软件对图像进行灰度化等预处理,完成图像预处理后,视觉系统进行深度学习,并建立特征库,最后通过建立的特征库与待检测的板件进行特征匹配,从而完成视觉系统对待测板件的识别,并将结果显示在显示屏上。
系统在进行识别之前需要对相机进行标定,这里采用更为简便的九眼标定法[7-10]。具体步骤如下:
第一步,准备一张有九个点的图片,称之为标定板,并且图中点是尺寸直径为3 cm的圆,九眼标定九点图如图3所示。

图3 九眼标定法标定板的图片
第二步,把这张标定板放置在工业相机的正下方,并且标定板需要处于水平位置,然后需要按照Z字形的顺序来记录这九个点的中心坐标是多少。
第三步,需要控制工业机器人,并且将工业机器人的末端操作器装配在工业机器人的法兰盘上,在实验室使用的末端操作器是一支笔,用笔尖来按顺序靠近九个圆的中心点,用笔尖可以更加精确地得到圆心的坐标,然后得到机器人记录的九组坐标数据。
第四步,需要用到HALCON 软件的算子,这一步需要在HALCON 软件上编程,并且运用之前所记录的数据。
5 视觉系统通信设置
目前主流通信协议有TCP/IP 协议、ModBus 通信协议、RS-232通信协议、串口通信等。
TCP/IP 协议:不依赖于特定的网络传输硬件,TCP/IP 协议能够集成各种不同网络。
ModBus协议:应用层面广,数据传输效率低。
RS-232 协议:抗干扰能力不强,传送距离有限,通常在15 m以内,仅能实现点对点通信。
串口通信:外设和计算机间,通过数据信号线、地线、控制线等,按位进行传输数据的一种通信方式。串口通信所需要的传输线相较于其他通信方式来说少很多,并且可以大大节省远距离通信的成本,唯一不足的是传输的速度比其他方式相对低一些。此工作站通信要求不高,因此选择串口通信。
同时在工业机器人示教器上编写程序,将电脑、PLC、相机、转接器相连接,通过示教器程序来实现相机和PLC 的通信功能,从而达到视觉系统与外部保持稳定通信的目的。这样一来,整个机器视觉的软件方面可以构成一个整体,共同协作来完成对板件的识别工作。
6 视觉系统测试
三种规格的板件,分别准备wcgxy.5-1 安装板A、wcgxy.5-2 安装板B、wcgxy.5-2 安装板C 各100 块,共计300 块安装板。将这300 块板件分批放入工作站中进行视觉识别分类与分拣。实验室设备如图4所示。
依次对三种板件进行识别,识别过程以及结果如图5、图6、图7、图8所示。

图5 三种板件识别前效果图

图7 板件C识别完成效果图

图8 板件B识别完成效果图
上述效果图是对三种板件分别进行识别,本视觉识别系统同样也可以对各种排列情况的板件进行识别,无论是对于单块板件,还是对于随机两种板件或三种板件,都可以进行精确识别。下面再演示对随机两种板件进行识别,识别效果如图9、图10、图11所示。
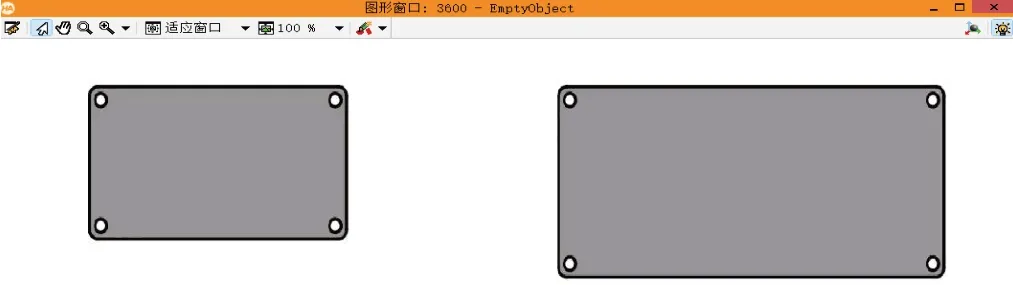
图9 安装板A和安装板C识别前效果图
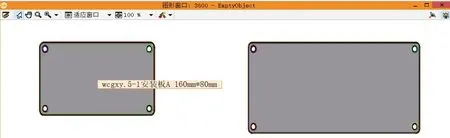
图10 安装板A和安装板C识别效果图(先对安装板A进行识别)
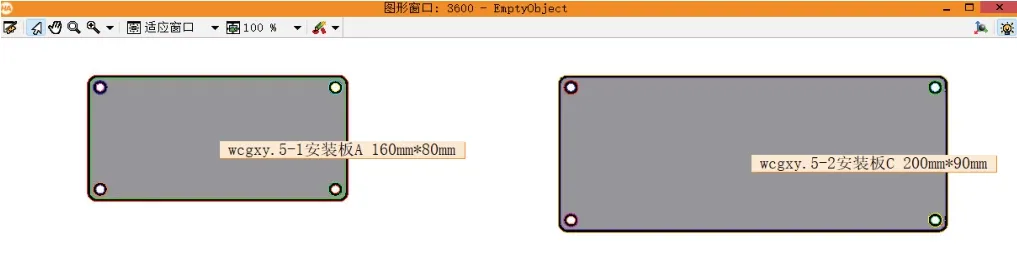
图11 安装板A和安装板C识别效果图
如图9、图10、图11 所示,本视觉系统成功完成了对随机两种板件的识别。
本工作站对300 块三种类型板件的视觉识别结果如表1所示。
从表1 可以看出,三种板件的识别成功率都在95%以上,所以该视觉系统的可靠性、准确性及工作效率较高。

表1 测试结果
7 结语
三种规格板件分拣机器人工作站中的关键部分是视觉系统,视觉系统是工作站能够对wcgxy.5-1 安装板A、wcgxy.5-2 安装板B、wcgxy.5-2 安装板C 这三种板件进行高效识别和分拣的基本保障。本文从现实情况和意义出发,通过确定农用机械多规格板件分拣工作站总方案来明确研究方向,再对系统硬件进行了设计和选型,对系统软件的设计以及软件之间的通信进行了研究,最后对本工作站视觉识别功能进行了测试,测试结果基本符合预期,能够满足需求。通过自动分拣农用机械多规格板件的工作站,可以大大提高农用机械的装配效率,减少人工成本,并且可以在恶劣环境中工作。
