基于Web的多体制中频测控一体机设计与实现*
2023-11-25夏珍珠朱晓辉李绍旸
夏珍珠,朱晓辉,李绍旸
(中国空间技术研究院,北京 100094)
0 引 言
测控基带设备是卫星地面TT&C测试、测控模拟和地面站测控业务中的核心单机。传统的地面测试系统中采用功能强大的引进设备Cortex CRT,该产品采用了通用化的工控机硬件平台和先进的软件无线电技术,其优点是性能优异、通用化强。在卫星地面测试过程中需配合信号源、频谱仪、开关矩阵、上变频器、下变频器、功率计、频率计及示波器等设备,虽然引进设备功能完备,但系统集成度低、连接关系复杂、信号中继环节多等缺点降低了系统整体可靠性。同时,其实现关键功能的核心技术不可控,发生与其相关的异常现象时由于涉及测控数据等关键信息难以协调外方展开深入分析,也无法针对需求做定制化开发,这成为制约系统集成度和测试效率进一步提高的瓶颈。
随着我国航天事业的快速发展,出现了统一S 频段(Unified S-band,USB)、统一C 频段(Unified C-band,UCB)、非相干扩频等多种测控信号体制共存的现状[1]。本文针对卫星测控体制多样化的发展趋势,研制了基于Web的多体制中频测控一体机以适应多体制测控、高集成、小型化和智能化的测控设备。针对上述需求,完成了测控一体机硬件和软件的设计。硬件采用软件无线电架构,大部分功能在数字基带中实现,在物理电路上将FPGA模块和ARM模块设计为一块电路板。软件设计包括核心数字基带算法、测控任务管理软件和嵌入式网页的开发,可通过Web浏览器和TCP/IP远程监控测控一体机,设备配置灵活,测控体制和功能可动态重构。
1 传统的测控基带设备
CORTEX CRT是法国ZODIAC DATA SYSTEM公司设计制造的遥测、遥控和测距集成基带处理设备,代表了当前测控基带设备的国际先进水平,具有遥测处理、多普勒测量、卫星遥控、卫星测距、遥测模拟和遥控自环比对等功能,是传统卫星测试系统中的核心单机。其主要功能是完成多路测控信号的调制解调,为卫星或卫星模拟系统提供可靠的测控链路,同时满足卫星测控分系统功能性能测试的需求。传统基带设备存在以下不足:一是技术不透明,对偶尔发生的丢帧等异常现象难以展开深入的分析;二是设备功能复杂,操作繁复;三是不具备功率、频率测量功能,为实现相关测试任务必须在系统中单独配置功率计和频率计;四是不支持传输音单载波信号输出,为实现相关测试任务必须在系统中单独配置信号源设备。
综上,通过对CORTEX CRT的硬件和功能性能分析发现,可将遥测、遥控、测距、侧音载波输出、功率测量和频率测量功能集成于一台设备中,达到减少信号链路、缩减设备数量和体积的目的。
2 设计目标和原理
2.1 设计目标
测控一体机的设计主要解决两个方面的需求:一是提高卫星遥测、遥控和跟踪系统的测试效率;二是多种测控信号体制的融合。
1)提高测试系统的测试效率
为了提高测试效率,需要降低地面测控系统的复杂度和提高系统的自动化水平。测控一体机的设计不仅具备遥测、遥控和测距功能,还具有遥测模拟、侧音载波输出、功率测量和频率测量的功能,在系统测试阶段可减少信号源、功率计和频率计等设备,从而减少了测试系统的中继环节,降低了系统的复杂度。为了提高系统的自动化水平,测控一体机的网络化设计采用基于C/S架构的TCP/IP网络接口设计实现序列化执行测试项目,采用基于B/S架构的嵌入式Web设计来实现远程更改配置和测控体制切换。
2)测控信号体制融合
测控一体机的设计具备三种常用的测控信号体制的调制解调,配置设备参数时,匹配中频信号的输入和输出调制解调方式即可实现不同测控体制的遥测、遥控和测距功能,设备的配置参数存储在设备中,设备启动后点击配置参数切换按钮可一键式完成测控体制的切换。
3)相比同类产品的优势
当前主流的同类型产品均是基于工控机架构,以FPGA为核心的数字信号处理板卡完成遥测、遥控和跟踪信号的处理。多体制中频测控一体机的优势在于与整个卫星地面测试系统的紧密融合和功能集成,可灵活切换测控体制,同一套测试系统适用于不同测控体制的测试需求,实现了高水平的自动化测试。
2.2 设计原理
测控一体机的设计借鉴软件无线电思想,整体设计为输入中频模拟信号,由ADC转换为数字信号输出至FPGA完成数字变频、信号捕获以及数字信号的调制解调处理,FPGA输出的数字信号经DAC转换为模拟信号输出。测控一体机数字化和网络化设计包括带通采样、内插处理、抽取处理和嵌入式Web技术等方面。
2.2.1 带通采样
测控一体机的输入和输出信号是中心频率为70 MHz的带通信号,采用带通采样可有效降低采样速率,使用较低的釆样速率即可还原输入信号的特性,降低了后续数字信号处理的难度。
设一个频带限制在(fL,fH)内的时间连续信号x(t),信号带宽B=fH-fL,令M=fH/B-N,N为不大于fH/B的最大正整数,采样频率满足
(1)
则可以由抽样序列无失真的重建原始信号x(t)[2]。测控一体机的带通采样在中频接收电路中实现,ADC采样频率为100 MHz,60~80 MHz的中频信号经采样后转换为20~40 MHz的数字信号由FPGA继续降频处理。
2.2.2 内插和抽取处理
抽取是软件无线电接收机的理论基础,内插是软件无线电发射机的理论基础,内插和抽取均在FPGA中完成。
在测控一体机的发射端,为了使数据速率与载波速率相匹配,需要对数据进行内插操作,以提高数据的采样速率。为了能恢复原始信号,内插后进行低通滤波。
在测控一体机的接收端,ADC后的数据速率很高,无法对全部数据进行处理,通过抽取操作进行重采样,以降低数据速率。为了防止信号抽取后产生混叠,抽取前用数字低通滤波器根据抽取后的采样率对信号进行滤波处理。
2.2.3 嵌入式Web实现原理
嵌入式Web服务器BOA监听超文本传输协议(Hyper Text Transfer Protocol,HTTP)端口80,当客户端向服务器发起连接请求后,客户端和服务器之间经过交互协议建立连接。服务器对客户端的HTTP请求进行解析,创建相应的通用网关接口(Common Gateway Interface,CGI)应用程序进程,并将客户端请求信息传递至CGI应用程序进程。CGI应用程序读取从Web服务器传递的客户端请求信息,对请求进行解析和处理后将处理结果返回至Web服务器,由Web服务器生成HTTP响应信息返回至客户端。
3 总体设计
多体制中频测控一体机主要实现USB、UCB和非相干扩频测控体制的遥控信号调制、遥测信号解调,以及测距测速。USB测控体制的上行载波和下行载波调制方式均采用调相(Phase Modulation,PM)。UCB测控体制的上行载波调制方式为调频(Frequency Modulation,FM),下行载波调制方式为PM。非相干扩频测控体制调制方式为PCM-CDMA-BPSK。多体制中频测控一体机的主要技术指标如表1所示。

表1 多体制中频测控一体机主要技术指标
如图1所示,多体制中频测控一体机主要由机箱、电源模块、中频数字信号处理模块组成。

图1 多体制中频测控一体机组成
图1中电源模块对测控一体机提供直流二次电源。嵌入式系统模块是以高性能ARM处理器和嵌入式Linux为核心的嵌入式微系统,实现任务管理与调度、数据的处理与存储、程序控制和网络通信等功能。FPGA模块实现信号的调制、解调等数字基带信号处理。中频接收电路接收中心频率为70 MHz、带宽为20 MHz的中频模拟信号,输出数字信号至FPGA。中频发射电路发射中心频率为70 MHz、带宽为20 MHz的中频模拟信号。视频接收电路接收模拟视频信号,输出数字信号至FPGA。视频发射电路输出0~1 MHz的视频模拟信号。时钟管理电路负责内外部频标信号的选择和生成中频信号处理模块所使用的时钟。时码输入电路采集IRIG-B时码,输出信号至FPGA。中频接收和发射、视频接收和发射、频标管理、时码管理、FPGA模块和嵌入式系统模块由一块PCB 板实现[3-5],所有硬件模块安装于高为1U的通用机箱中。
4 硬件设计
基于Web的多体制中频测控一体机的硬件电路模块主要用于实现中频信号的输入/输出和视频信号的输入/输出,并完成相关的信号处理。
4.1 嵌入式系统设计
嵌入式系统的主要任务是运行任务管理软件,实现设备的任务调度、数据存储和网络通信控制。系统硬件主要包括ARM处理器、存储器和以太网络等对外接口电路。
处理器选用工作主频1.0 GHz的工业级ARM器件。处理器外接DDR3 SDRAM作为系统扩展内存,外接Nand Flash作为遥测数据、配置参数、日志信息及其他关键数据的非易失存储,对遥测数据进行不间断缓存,且缓存数据掉电不丢失。
对外数据接口采用双路冗余备份的千兆以太网口作为主要数据交互接口,既满足现阶段使用需求,也具备可扩展空间。
操作系统使用嵌入式Linux系统,基于开源的Linux内核进行定制化裁剪,并单独开发了针对FPGA信号处理模块的驱动软件,实现应用软件与硬件设备层隔离,保障了系统的性能、可靠性及软件的可移植性。
4.2 FPGA模块电路设计
FPGA模块包括FPGA及其所需的电源、时钟、加载和调试接口等电路。
FPGA选用Xilinx公司的Virtex-7系列高性能器件,完成基带信号的数字调制、解调。作为数字信号处理模块的核心器件,FPGA负责所有中频和视频信号的处理工作,包括采集和发射电路。中频接收电路的两路ADC、中频发射电路的两路DAC、视频电路的ADC和视频电路的DAC均与FPGA相连。FPGA内部实现的功能还包括与ARM处理器的专用接口、中断管理、时钟管理等。主要模块如下:
信号处理:实现70 MHz模拟中频和基带信号的采集与生成。
与ARM接口:实现FPGA与ARM之间的数据传输,ARM根据上位机或嵌入式网页下发的指令将对应的配置参数写入FPGA的指定寄存器或是从指定的寄存器读取数据。
中断管理:管理FPGA输出至ARM的中断信号,主要包括中频接收通道1中断、中频接收通道2中断、遥控接收中断和遥测发送中断共四种类型的中断,确保ARM在响应FPGA中断的同时FPGA不再上传新的中断。
参数配置管理:接收嵌入式系统模块下传的配置参数,使FPGA根据用户配置参数工作。同时,参数配置管理子模块将FPGA的参数配置、工作状态等状态信息传送给嵌入式系统模块,再通过网口传输给上位机软件或嵌入式网页用于设备监控。
时钟管理:FPGA共输入3路时钟,分别用于对外接口信号的处理时钟,包括100 MHz的A/D采样时钟、500 MHz的D/A转换时钟和20 MHz的时频转换时钟。
本地时标:FPGA的本地时间管理模块,产生FPGA本地时标信息,为遥控帧数据、遥测帧数据加入时标信息。本地时标模块支持上位机授时,同时支持上位机读取FPGA本地时标,时标信息包括年、天、小时、分钟、秒、毫秒、微秒,精度为1 μs。
温度采集:利用Virtex-7芯片自带的系统监控功能,采集FPGA芯片温度发送至ARM主控模块,通过网口传输给上位机软件或嵌入式网页进行实时监控。
LED控制:FPGA数字信号处理模块控制两路中频输入和输出共4路LED。
4.3 中频接收电路设计
中频接收电路主要完成中心频率为70 MHz、带宽为20 MHz、输入功率动态范围为-90~0 dBm的中频模拟信号接收,模数转换后输出数字信号至FPGA模块。图2为中频接收电路的原理框图。

图2 中频接收电路原理
滤波电路采用两级带通滤波,前级带通滤波器用于滤除输入信号的谐波和其他杂散分量,后级带通滤波器用于ADC采样时的抗混叠滤波。功率调整由固定增益放大器和数控衰减器组成,数控衰减器由FPGA依据数字检波或功率检测的结果来调节。ADC将模拟中频信号转换为数字信号输出至FPGA。
4.4 中频发射电路设计
中频发射电路主要完成中心频率为70 MHz、带宽为20 MHz、输出功率动态范围为-90~0 dBm的中频模拟信号输出。图3为中频发射电路的原理框图。
DAC接收FPGA输出的中频数字信号,将数字信号转换为模拟信号。滤波电路采用两级带通滤波,用于滤除输出信号的谐波和其他杂散分量。功率调整由固定增益放大器和数控衰减器组成,数控衰减器的衰减量由FPGA程序控制。
4.5 视频接收电路设计
视频接收电路接收模拟视频信号,经过低通滤波器、差分放大和模数转换后输出数字信号。
低通滤波器对视频输入信号进行低通滤波,差分放大器用于将单端信号转换为差分信号,ADC将模拟视频信号转换为数字信号输出至FPGA。
4.6 视频发射电路设计
视频发射电路将数字信号经过数模转换、差分放大和低通滤波器后,输出视频信号。
DAC接收FPGA输出的视频数字信号,将数字信号转换为模拟信号。差分放大器将差分信号转换为单端信号,并进行幅度放大。低通滤波器实现模拟信号的滤波和放大输出。
5 软件设计
5.1 任务管理软件设计
任务管理软件运行在ARM处理器上,开发环境为Linux操作系统。任务管理软件架构如图4所示。

图4 任务管理软件架构
5.1.1 接口程序设计
TCP/IP通信服务:作为服务器端为遥测获取、遥控操作、参数配置、设备监视和测距操作等客户端分别提供相应的Socket通信服务端口,客户端连接服务器端Socket端口与服务端按照数据交互协议进行数据交互,服务端处理处理客户端请求并返回应答。
FPGA驱动通信服务:与FPGA驱动进行数据交互,实现遥控数据的发送、遥测数据的接收、FPGA状态信息采集和FPGA工作参数的设置。
CGI通信服务:与Web后端CGI程序通过共享内存进行数据交互,实现工作模式控制、参数设置和状态查询。
5.1.2 核心功能
任务管理和调度:接收以太网络遥控、测距、参数配置等指令,执行相应的任务并返回执行结果,如遥测数据缓存和发送、测距测速的逻辑控制、遥控数据的接收发送和自环比对。
状态监测:收集测控一体机的各种状态信息,包括FPGA的状态信息,如FPGA系统监控功能中所有被监测信号的量值;硬件状态,如当前风扇转速和FLASH检测状态;软件状态,如当前工作状态、IP地址和TCP端口连接状态等。
自检测:系统启动时进行加电自检测,检测项目包括存储器读写、与FPGA通信、以太网络接口、LED巡检和风扇检测。自检完成后收集自检数据信息并存入日志。
故障告警:当自检测失败,或状态监测信息超出设置的阈值时,通过LED告警灯上报故障告警信息,故障信息存入日志。
日志管理:缓存部分遥测、存储告警信息、存储配置参数、存储启动自检测记录等。
5.2 数字基带信号处理软件设计
数字基带信号处理软件运行在FPGA器件中,主要完成中频测控信号的调制解调和测距算法的实现,以及功率计算、频率计算、信噪比估计等测量辅助功能[6-11]。为了在同一台硬件中实现针对UCB、USB和非相干扩频测控体制的应用,在数字基带信号处理软件中设计了两套并行的基带信号处理算法,其中一套负责处理UCB、USB测控体制,另一套负责处理非相干扩频测控体制。
5.2.1 UCB、USB测控体制
图5为UCB、USB测控体制数字基带信号处理算法原理框图。

图5 UCB、USB测控体制数字基带信号处理软件算法原理
模数转换部分:为了降低后续数据处理速率,对中频输入信号进行带通采样,实现频偏的一次下搬移。载波跟踪完成后,信号从中频变为基带。
捕获跟踪部分:采用FFT算法进行中频信号的快速捕获,同时结合唐检测器来完成检测判决。载波初始捕获完成后,系统将进入载波跟踪环节,采用锁相环进行载波的跟踪,同时完成调相信号的解调,输出基带信号给下一级模块进行处理。
信号分离部分:为了避免在解调过程中相互影响,采用带通滤波器的方法将遥测副载波信号和测距信号分离。
解调部分:遥测副载波信号的BPSK信号采用相干解调的方法。对于数字调相信号,相干检测过程与理论上的最优解调的方法相符合,可以在较低的信噪比下工作。
测距采用接收发射比相法计算相差及解模糊,完成距离测量。
5.2.2 非相干扩频测控体制
非相干扩频测控体制数字基带信号处理算法主要包括捕获、跟踪两大功能模块[12-16],其中,捕获模块包含伪码相位捕获、载波频率捕获、数据位捕获,这三个子模块串行工作;跟踪模块包含伪码相位跟踪、载波频率跟踪、数据位跟踪,这三个子模块并行工作。图6为非相干扩频测控体制数字基带信号处理算法原理框图。

图6 非相干扩频测控体制数字基带信号处理软件算法原理
5.3 嵌入式网页设计
嵌入式网页实现远程用户通过Web浏览器登录访问多体制测控一体机,通过网页设置遥控、遥测、测距等相关参数信息,采集并显示整机所有的工作状态参数,完成对设备的监控。图7为嵌入式网页设计原理框图[17]。

图7 嵌入式网页设计原理
5.3.1 Web前端网页设计
Web前端网页采用HTML、JavaScript、CSS、jQuery和AJAX技术实现。HTML和CSS实现页面的呈现效果,JavaScript、jQuery和AJAX实现网页的动态交互。由JavaScript监听浏览器用户操作事件,创建XMLHttpRequest对象,执行send方法向服务器发送请求,XMLHttpRequest对象获取返回数据,解析数据后完成页面数据的动态更新。
5.3.2 Web服务器
嵌入式Web服务器采用Boa服务器,嵌入式Boa服务器相比与其他嵌入式服务器更加精简且便于开发。Boa服务器主要完成嵌入式系统与客户端的网络通信功能,建立Web 浏览器与嵌入式服务器的HTTP 连接,监听浏览器请求,根据浏览器的请求调用相应的CGI程序并返回应答。
5.3.3 CGI程序
CGI程序主要完成与Boa服务器和任务管理软件的通信。CGI 程序解析前端网页的请求,成功获取数据后返回数据内容至网页显示。CGI 程序与任务管理软件均采用C语言编写,可以直接采用内存共享的方式进行数据交互,将任务管理软件采集的遥控、遥测、测距以及设备状态信息发送至浏览器网页显示。CGI 程序与任务管理软件进行数据交互的流程如图8所示。
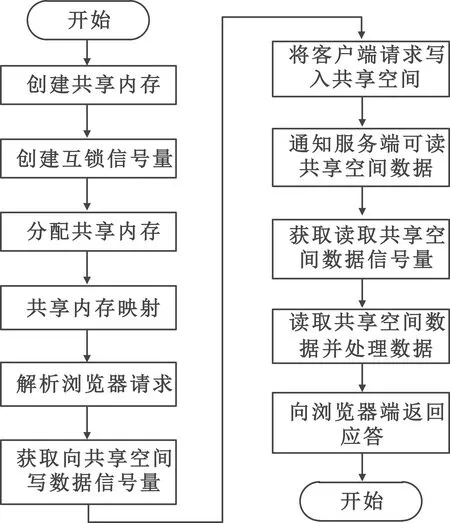
图8 CGI程序与任务管理软件数据交互流程
6 测试结果和应用
6.1 卫星地面测试应用
在卫星地面测试阶段,地面设备与卫星之间采用射频有线或无线连接,如图9所示。以多体制中频测控一体机为核心,图中的相关设备负责建立并维持被测卫星与地面测试系统之间的TT&C链路,形成闭合的测试回路,功率计、频谱仪、示波器用于上下行测控信号监视。
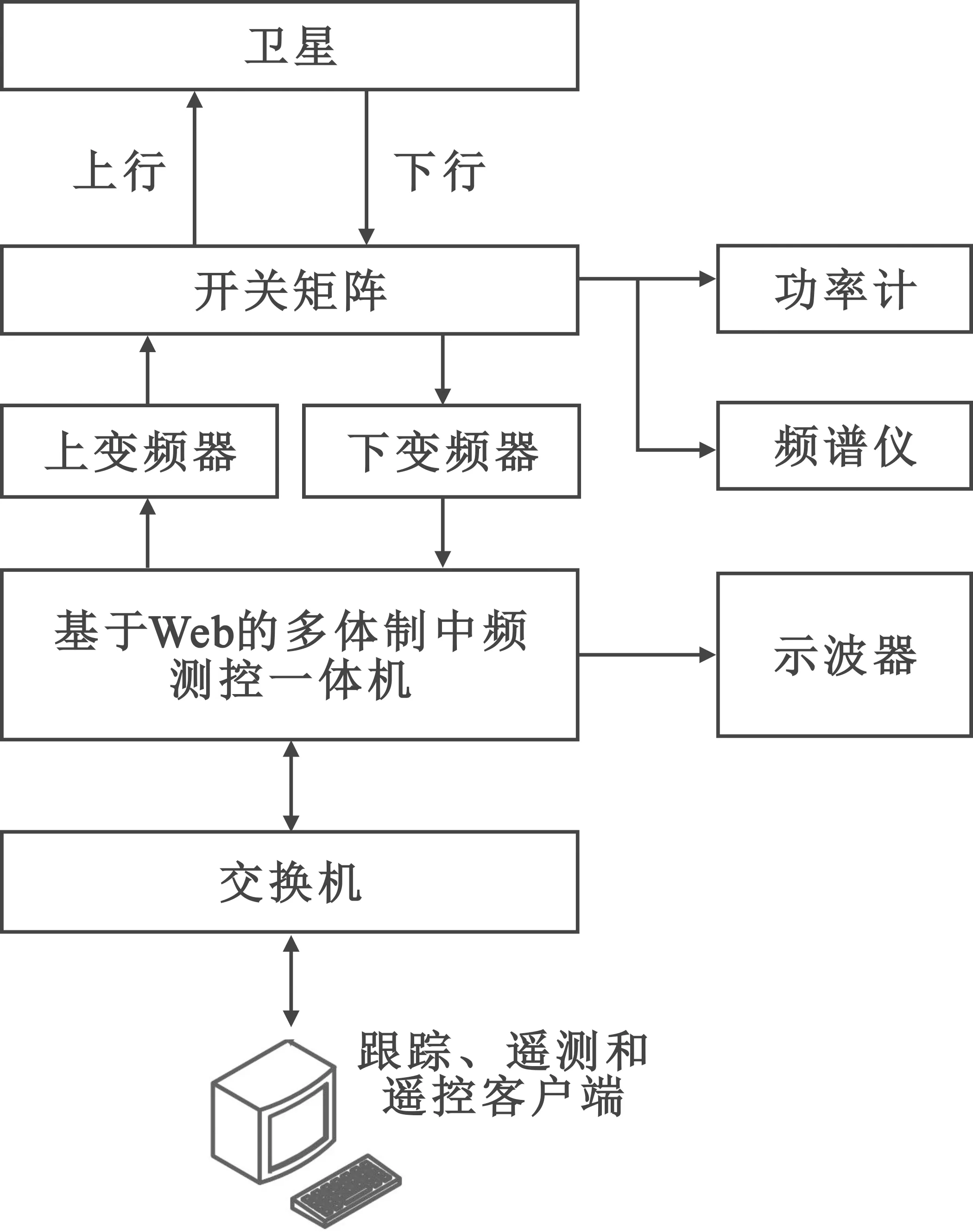
图9 卫星地面测试TT&C连接图
完成系统硬件连接设置后,远程访问设备的Web页面,首页如图10所示,包括中频接收(Intermediate Frequency Receive,IFR)、中频调制(Intermediate Frequency Modulation,IFM)、测距单元(Ranging Unit,RAU)、遥测模拟(Telemetry Simulation,TMS)、遥控单元(Telecommand Unit,TCU)、遥测单元(Telemetry Unit,TMU)等模块,根据测控需求加载或修改输入输出配置可直接切换为不同的测控体制工作模式,配置信息存储在设备中。

图10 Web页面首页
6.2 测距测试
根据图9所示的测试连接环境,分别使用多体制中频测控一体机和Cortex CRT进行距离测量测试。
6.2.1 UCB测距体制
UCB测距体制上行FM,下行PM,测距音的主音频率为27.777 78 kHz,传输音频率为19 kHz,次音频率为3 968.25 Hz,283.45 Hz和35.43 Hz,测量次数为100次。下行遥测为48 kHz的单载波,测控一体机与Cortex测试结果如表2和表3所示,记录的测量方差为主音和次音测量的最大方差值。
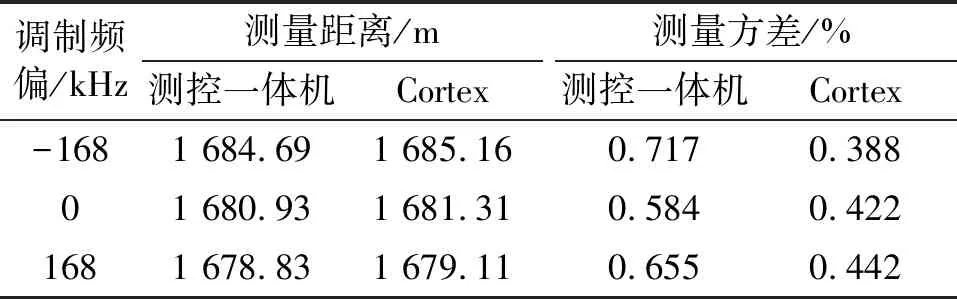
表3 不同输出调制频偏下的测距结果
下行信号加调遥测后进行测距测试,测控一体机与Cortex测量方差如表4所示。

表4 加调遥测下行信号的测距结果
在加调和不加调遥测下行信号的情况下,针对不同的输出功率和调制频偏,测控一体机与Cortex测距结果一致。
6.2.2 USB测距体制
USB测距体制上下行均为PM模式,测距音主音频率为100 kHz,次音频率包括20 kHz,16 kHz,16.8 kHz,16.16 kHz,16.032 kHz和16.008 kHz,测量次数为100次。测控一体机与Cortex测距结果如表5所示。

表5 USB测距体制的测距结果
USB测距体制下,测控一体机与Cortex测距结果一致。
6.2.3 非相干扩频测控体制
非相干扩频测控体制采用非相干伪码测距和多普勒测速,上、下行信号采用测距帧结构,帧内信息为测距信息。非相干扩频测控体制下的测距结果如表6所示。

表6 非相干扩频测控体制测距结果
非相干扩频测控体制下,测控一体机与Cortex测距结果一致。
6.3 遥测遥控测试
遥测遥控测试使用Cortex STS模拟卫星进行遥控指令解调和模拟遥测输出,测试时使用同轴电缆将测控一体机和Cortex CRT分别与Cortex STS直连。
UCB和USB测控体制下行遥测副载波设置为65 536 Hz,码速率为4 096 b/s。非相干扩频测控体制下行遥测伪码速率为10.23 Mchip/s,码速率为4 096 b/s。每项测试发送遥测7 200条,测试结果如表7所示。
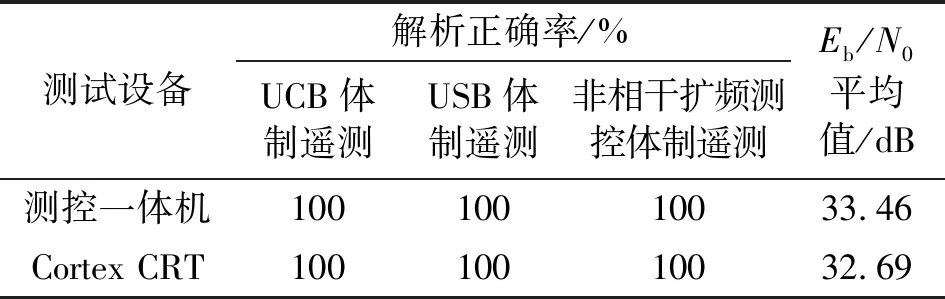
表7 遥测解调测试结果
UCB和USB测控体制上行遥控副载波设置为8 000 Hz,码速率为1 000 b/s。非相干扩频测控体制上行遥控伪码速率为10.23 Mchip/s,码速率为1 000 b/s。每项测试发送指令1 000条,包含执行脉冲,测试结果如表8所示。

表8 遥控发令测试结果
测控一体机与Cortex在遥控测试中均能正确完成指令发送和遥测解调,接收Eb/N0值一致。
7 结 论
作为卫星地面TT&C测试、测控模拟和地面站测控业务的核心设备,基于Web的多体制中频测控一体机能够完全替代引进产品,涵盖了USB、UCB和非相干扩频测控体制的遥控信号调制、遥测信号解调,以及测距测速,并具备高集成、小型化、智能化等明显优势。整个测控一体机的设计具有良好的通用拓展性,大部分功能在数字基带中实现,测控码速率、码长等内容可设置,满足USB、UCB和非相干扩频测控的业务需求,具有良好的应用前景。