自动化包装机械运行速度控制系统的开发设计
2023-11-25周广越辛欣
周广越,辛欣
(华北理工大学机械工程学院,河北唐山 063210)
自动化包装机械运行速度控制系统是一种用于提高包装过程效率和准确性的技术[1]。该系统通过使用先进的控制算法和传感器技术,实时监测和调整包装机械的运行速度,以满足不同产品的包装要求。目前,国内研究对自动化包装机械运行速度控制系统的研究已取得了一些进展。一些研究关注于探索新的控制算法和技术,以提高系统的性能和精度[2]。另一些研究致力于优化系统的设计和实施过程,以提高系统的可靠性和稳定性[3]。此外,还有研究关注于系统的智能化和自适应能力,以满足不断变化的包装需求[4]。文章提出了一种新的控制系统方案,旨在提高包装机械的运行效率和准确性。
1 硬件设计
1.1 系统运行模块
RHI58N-0AAK1R6XN-02048增量型编码器是一种高精度的传感器设备,适用于各种工业应用场景[5]。其通过测量旋转轴的角度和速度来获取系统运行的实时数据。编码器具有快速响应、高分辨率和稳定性等特点,提供准确的数据反馈。将RHI58N-0AAK1R6XN-02048增量型编码器安装在系统的关键部位,可实时监测系统的运行状态。编码器会不断产生脉冲信号,反映旋转轴的运动情况。这些脉冲信号通过接口与系统的控制单元进行连接,实现数据的传输和分析。
通过在运行模块中设置带有不锈钢薄膜集成式1.5"夹持膜片密封件,确保在-25~200 ℃范围内的高温环境下,保证自动化包装机械的运行数据完整性和系统操作安全性。这种密封件能够有效防止外部物质和液体的侵入,保护系统的稳定性和可靠性,同时也防止运行数据的泄露。
1.2 显示模块
6AV2124-0JC01-0AX0触摸屏是一种先进的人机界面设备,广泛应用于工业控制系统中,其具有高分辨率、触摸操作、实时显示等特点,以实现对系统数据的监控和管理。
通过连接6AV2124-0JC01-0AX0触摸屏与调节数据显示管理系统,实时显示系统的运行状态、参数和报警信息等。触摸屏上的界面设计根据实际需求进行定制,便于操作和数据查看。通过触摸屏的触摸操作,用户轻松地浏览和调节系统的各种参数和设置。
1.3 控制模块
STM32F103RCT6是一款功能强大的ARMCortex-M3内核的微控制器,具有高性能和低功耗的特点,丰富的外设接口和强大的计算能力使其非常适合用于工业控制应用。
如图1所示,在自动化包装机械运行时,系统的运作核心将收到操作指令。在STM32的分析下,其会将自动化包装机械的调速信号输至变频器。变频器是一种用于控制电机转速的设备,通过改变电压和频率来调节电机的运行速度。通过与变频器的配合,STM32根据系统的需要精确地控制包装机械的运行速度。利用STM32强大的计算能力和丰富的外设接口,实现对包装机械的精准控制和调速。
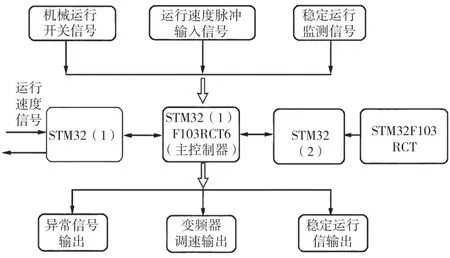
图1 机械控制器运行速度控制过程
2 软件设计
2.1 主程序设计
当自动化包装机械处于某一包装工序时,主控制器会接收运行信号,并立即做出反应。主控制器内设有速度曲线,根据该曲线来控制包装机械的运行。运行速度检测流程如图2所示,运行速度控制如图3所示。
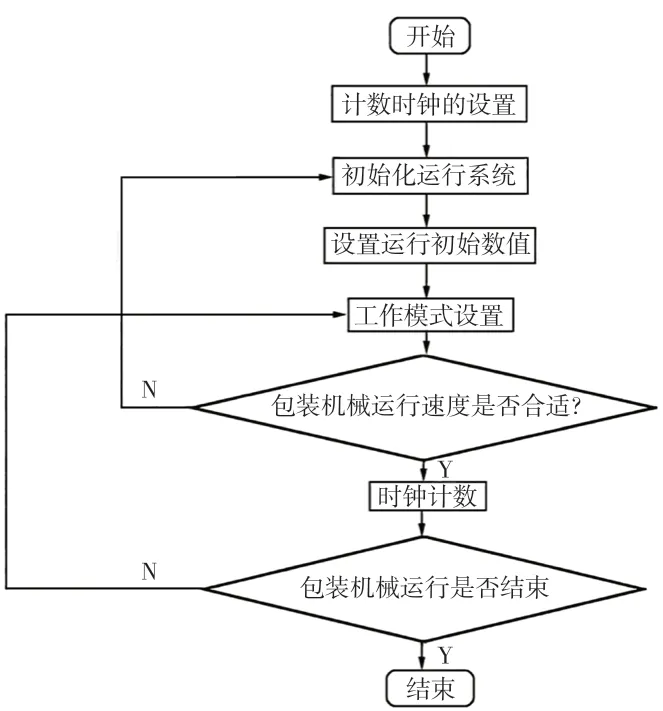
图2 运行速度检测流程

图3 运行速度控制
具体来说,主控制器会根据包装工序的要求设定相应的运行速度,这些速度信息事先预设在主控制器中,也通过外部输入设备进行实时调节。主控制器会根据设定的速度曲线,逐步调整包装机械的运行速度,以实现包装运行的要求。主控制器还会对包装机械的速度进行检测。通过与包装机械的编码器或传感器连接,主控制器实时监测包装机械的运行速度,并与设定的速度曲线进行比对。如果检测到包装机械的速度偏离设定值,主控制器会立即做出相应的调整,以确保包装机械的运行速度符合要求。
主控制器主要用于控制自动化包装机械的运行速度,并对包装机械的速度进行检测,通过设定速度曲线和与包装机械的编码器或传感器的连接,主控制器实现对包装机械运行速度的精确控制和检测,以确保包装机械在不同的包装工序中以设定的速度运行,提高包装效率和质量。
2.2 运行速度智能控制算法
在包装机械运行区间中,选取一个有限的时间区间[0,t],通常选择包装机械工序之间的两个环节作为运行区间[t1,t2],其中t1∈[0,t]。将采样时间设置为φ,那么离散时间区间描述为τ=0,1,…,χ,其中存在t=φ·τ。根据欧拉定理,微分方程被离散化为:
式中,y(τ)为离散时间点τ上的系统状态,f(τ,y(τ))为离散时间点τ上的系统状态的变化率。
通过离散化微分方程,在离散时间点上计算系统状态的变化,并进行相应的控制。
通过将微分方程离散化,在离散时间点上计算包装机械系统状态的变化,并进行相应的控制,以便更好地描述包装机械的运行过程,并实现对其运行速度和状态的控制。
为了方便控制包装机械的运行速度,将包装机械的运行速度和位置变化定义为系统状态。在离散时间点τ上,系统状态表示为:
式中,y(τ)为离散时间点τ上的包装机械位置,v(τ)为离散时间点τ上的包装机械速度。
通过离散化微分方程,在离散时间点上计算包装机械位置的变化,并进行相应的控制。通过将包装机械的运行速度和位置变化定义为系统状态,并离散化微分方程,在离散时间点上计算包装机械位置的变化,并实现对其运行速度和状态的控制。这样更好地描述包装机械的运行过程,并方便地进行控制。
3 实验设计
3.1 实验参数
包装机械的工作电压为220 V,包装机械的初始速度为300r/min,在实验中,包装机械将会包装100件食品,机械与其他设备或系统进行接口管理,可能会有输入输出的数据传输,这些参数设置将用于实验中,以控制包装机械的工作条件和性能。实验参数设置见表1。
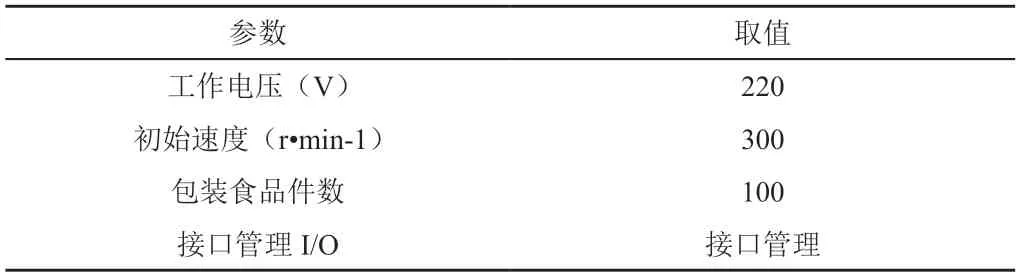
表1 实验参数设置
3.2 实验结果
3.2.1 不同系统机械运行速度控制准确性分析
为了验证文章系统的有效性,实验对比了文章系统、系统一、系统二在包装机械运行速度控制的准确性。
文章系统:根据实验结果,文章系统在包装机械运行速度控制方面表现出较高的准确性。通过将包装机械的运行速度和位置变化定义为系统状态,并离散化微分方程,文章系统能够在离散时间点上计算包装机械位置的变化,并进行相应的控制。这样更好地描述包装机械的运行过程,并方便进行控制。实验结果显示,文章系统能够有效地控制包装误差,提高包装机械的运行准确性。
系统一:系统一利用神经网络算法进行速度自适应的控制方法,改进了非线性关联的现象,能够在包装材料速度达到稳定时,有效控制包装误差。然而,实验结果显示,系统一的抗干扰能力较差,容易受到外界干扰的影响,导致包装误差较大。这可能是由于系统一忽视了对数据的快速处理,无法及时调整控制速率,导致系统反应较慢。
系统二:系统二根据包装机械系统运行的特征,设计了自动化模块,调节自动化控制速度等,实现了自动化包装机械控制系统的设计。然而,实验结果显示,系统二的系统控制速率较低,无法快速响应包装机械的变化需求。这可能是由于系统二忽视了对数据的快速处理,系统控制速率较低。
由图4看出,在实验次数为2和8时,文章系统相对于系统一和系统二在包装机械运行的控制准确性方面表现较好。实验次数为2时,文章系统的控制准确性约为89%,相比之下,系统一的控制准确性约为78%,系统二的控制准确性约为59%。这意味着在较少的实验次数下,文章系统能够更准确地控制包装机械的运行。实验次数为8时,文章系统的控制准确性约为95%,系统一的控制准确性约为89%,系统二的控制准确性约为85%。这表明随着实验次数的增加,文章系统的控制准确性进一步提高,而系统一和系统二的控制准确性也有所增加,但相比之下仍然低于文章系统。文章系统在控制包装机械运行时具有较好的准确性,无论是在较少的实验次数下还是在较多的实验次数下,文章系统均能更准确地控制包装机械的运行,提高包装的准确性。

图4 不同方法机械运行速度控制准确性对比
3.2.2 不同系统机械运行速度控制稳定性分析
文章系统的控制表现出较高的稳定性,其控制包装机械运行速度的变化频率始终在1~2 Hz 范围内。这意味着文章系统能够较好地维持包装机械的运行速度稳定,避免了过大的波动。不同方法机械运行速度控制稳定性对比如图5所示。
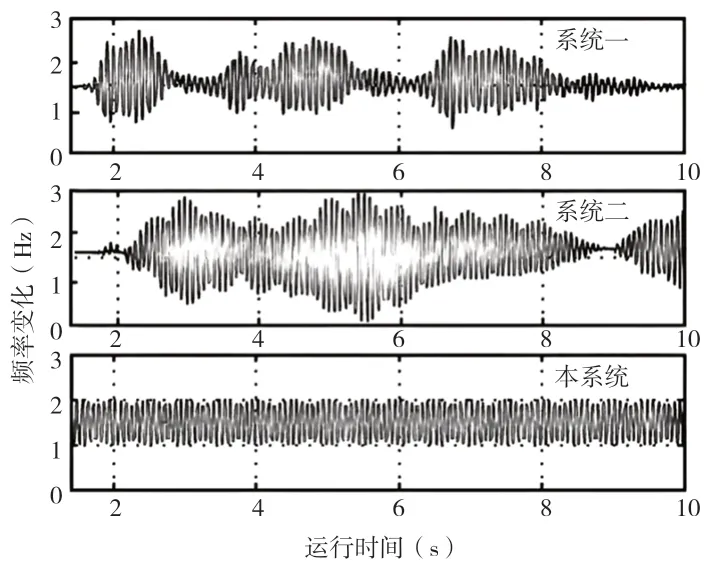
图5 不同方法机械运行速度控制稳定性对比
系统一和系统二在控制包装机械运行速度方面表现出较低的稳定性,所控制的运行速度出现不同幅度的波动,无法保持稳定。这可能是由于系统一和系统二的控制算法或控制模块设计不够优化,导致了速度的波动。因此,采用文章系统进行包装机械运行速度的控制可获得较高的稳定性。这有助于提高包装机械的运行效率和准确性,减少包装误差。然而,仍然需要进一步研究和改进系统一和系统二的控制方法,以提高其稳定性。
4 结束语
文章成功地设计了一种自动化包装机械运行速度控制系统,该系统在控制准确性和稳定性方面表现出较好的性能。通过文章系统的应用,有效地提高了包装机械的运行效率和准确性,减少了包装误差。然而,文章系统仍然存在一些改进的空间,例如进一步优化控制算法和增加系统的灵活性。未来的研究须进一步完善文章系统,并探索其他创新的控制方法,以满足不断变化的包装需求。
