基于工业传感器的刀闸位置双确认技术分析及优化
2023-11-25邓志雄
邓志雄
(广东电网有限责任公司梅州供电局,广东 梅州 514000)
随着调控一体化操作模式的普及,远方遥控刀闸是否分合到位成为保障电网安全稳定运行的关键所在。为解决调控一体化目标模式下刀闸位置双确认技术问题,实现在原有刀闸机构位置节点信号基础上,通过刀闸位置远方辅助识别技术新增第二辅助判据,但因刀闸位置双确认技术还在起步应用阶段,现场安装施工方案还存在诸多问题,须从运行专业角度出发不断优化方案。以及随着调控一体化衍生出远方操作的风险,运行人员将面对新的挑战。
1 研究现状分析
为了实现对刀闸分合状态的自动检测,刀闸位置双确认技术指用2个或2个以上的状态判据同时发生对应变化来确认刀闸已分闸或合闸到位,一般分为刀闸分合闸位置主要判据和辅助判据。通过增加工业传感器(含金属接近传感器、微动开关、姿态传感器等),采集传感器输出的电气信号,经内部逻辑处理后,转化为用于指示刀闸分合闸状态的硬接点信号作为刀闸分合闸位置双确认判据[1-2]。
本文通过对刀闸位置双确认技术应用情况的调查分析,发现能采用方法有多种,且不同设备、不同现场环境可采用的方法也不相同,表1给出了主流各类工业传感器优缺点分析。当变电站刀闸逐步应用第二判据以后,对运行人员及工作模式带来新的变化和挑战。
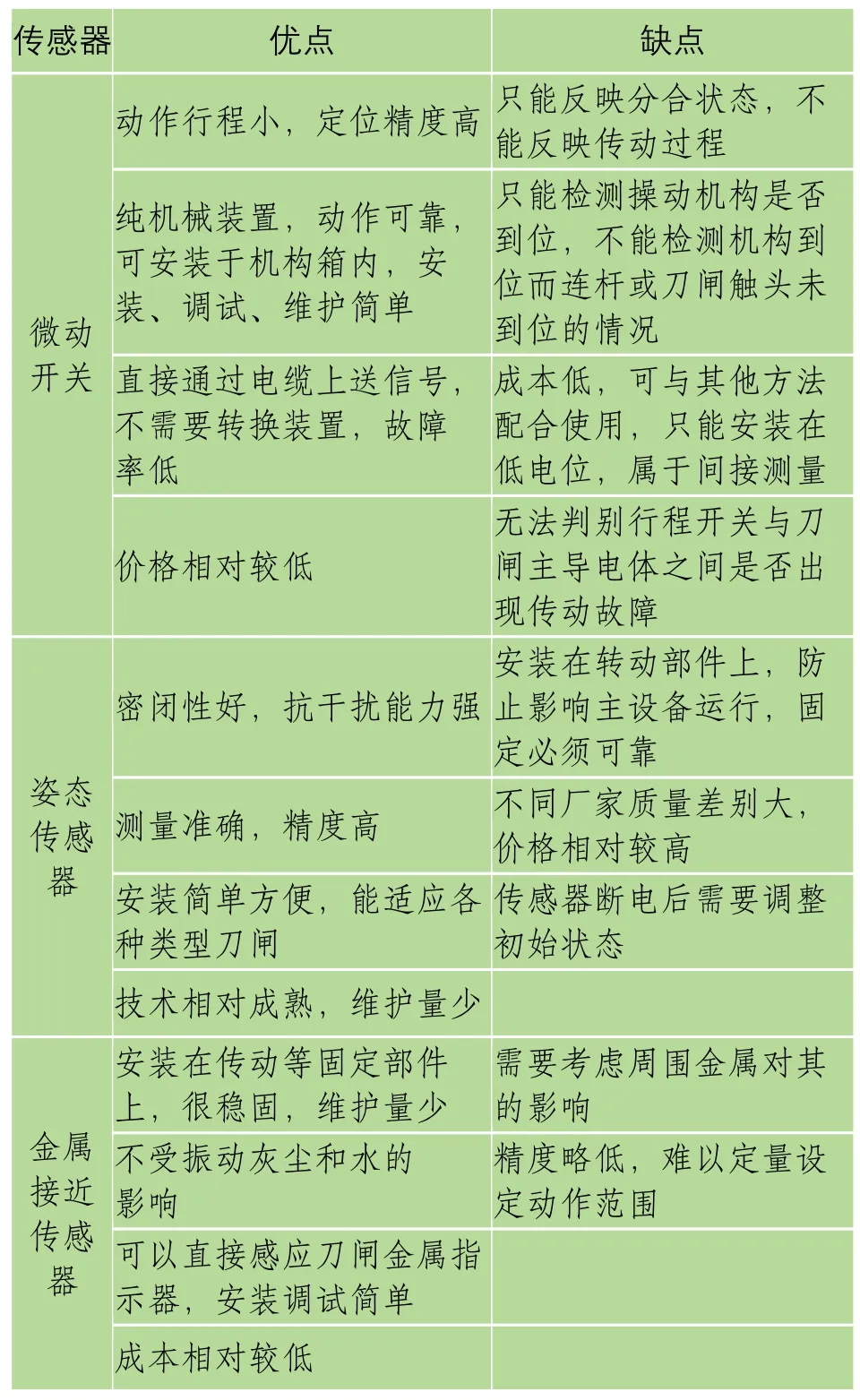
表1 各类传感器优缺点分析
2 刀闸位置双确认技术案例问题分析及优化方案
2.1 安装调试阶段
运行人员在验收某站220 kV刀闸位置传感器安装,进行刀闸第二判据实操对位调试时,发现传感器变位受阻,刀闸、地刀部件误碰传感器或其附件,使其不能正确变位甚至受损的问题,如图1所示。

图1 刀闸位置传感器变位受阻
优化方案如下。
保持传感器安装底座平面与刀闸的旋转平面的一致性,且固定必须可靠,防止因振动移位。在强电场、强磁场、强振动的工况下,传感器为保证精确检测刀闸角度及防止其他金属对电磁感应原理传感器造成影响,应选择正确的安装方式及位置。
安装传感器时,必须考虑好刀闸、地刀相关部件的运动轨迹,避免传感器与其发生接触,难以判断时,可以结合工作采用手摇刀闸、地刀慢合、慢分进行观察判断。
金属感应片到传感器的距离影响传感器的动作,因此在安装前应计算好距离,制作满足要求的固定扣,同时金属感应片的安装不能影响刀闸的转动部分。
传感器的固定扣应采用硬度高、不宜变形的材料制作,防止固定扣变形导致传感器移位,影响判别精度。
运行人员在验收某站220 kV加装刀闸位置双确认装置时,发现传感器安装在刀闸主传动杆上,而非经副连杆传动的刀闸末端相。传感器的电缆在刀闸底座等位置布置走线时,未明确具体固定要求,出现电缆晃动、下垂过多等问题,如图2所示。

图2 电缆晃动、下垂
优化方案如下。
传感器安装在刀闸连杆上时,结合刀闸结构,传感器应牢固安装于刀闸相应旋转部件上,优先安装在刀闸传动机构末级。安装位置应能准确检测到刀闸的分合闸位置变化,可靠、有效地判断刀闸本体所处的分合闸位置状态,包括分闸到位、合闸到位、分闸异常或合闸异常。
要求设计及厂家明确固定电缆用辅助材料和要求,如图3所示,如U型夹、不锈钢抱箍、不锈钢扎带、不锈钢螺丝、固定间距等。

图3 固定电缆的U型夹
运行人员在验收某新站220 kV垂直伸缩式刀闸加装刀闸位置双确认装置时,发现刀闸动静触头发生偏离,未完全对准,但刀闸传动机构和连杆已达到行程,如图4所示。若无人在现场检查确认,调度则因一键顺控操作执行下一步操作甚至合开关。

图4 垂直伸缩式刀闸触头偏移
优化方案如下。
刀闸传动机构和连杆到位,但触头不到位情况的刀闸,因较难检测这种异常,因此建议此类刀闸不纳入一键顺控操作。如果必须纳入,建议操作时增加由人员现场检查或通过摄像头、无人机远程查看进行确认[3]。
采用视频图像识别技术路线,通过视频及智能分析技术实现刀闸位置的辅助判断。
2.2 设备运维阶段
运行人员在巡视检查某站500 kV刀闸第二判据遥信信息时,发现图纸信号错误,如图5所示,刀闸第二判据测控遥信开入的分位、合位信号与刀闸位置识别装置的输出信号取反。现场二次标签混乱,厂家装置处的硬接点排序是“分、合、异常”,而接入测控的顺序则是“合、分、异常”。因无前期设备标识可参考,施工单位对新增的二次标签命名无所适从,验收时出现混乱的标识命名,同时若未关注传感器的固定、指示标识,将对后续维护工作造成不便。
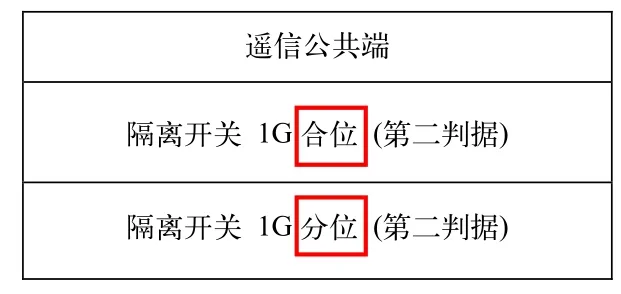
图5 图纸刀闸分合位遥信错误
优化方案如下。
厂家在白图上注明分位、合位信号的端子排序,设计根据厂家注明的信号端子排序正确设计开入到测控的信号命名,防止后台、调度的位置信号与现场实际取反,避免不必要的改图、改接线、反复修改后台及远动信号、调度信号等工作;
重点关注传感器及其定位等标识,提前与施工单位进行命名、标识沟通。建议对传感器固定位置、指示位置等增加标记,如图6所示,以便观察传感器有无移位、帮助传感器维护后的准确定位而无须再次动刀闸调试。

图6 传感器固定位置标记
对于不确定投运日期或投运日期较久的备用间隔,建议先不安装第二判据的传感器。因为传感器安装方便快速,且电子产品更新迭代较快,可以投产前再进行安装。
3 刀闸位置双确认技术下操作风险及管控
3.1 刀闸实际操作不到位
根据运行经验,敞开式刀闸不能分合闸到位的故障概率相对较高,在这种状态下同时刀闸双位置功能同时失效,刀闸操作不到位,给运行设备留下严重安全隐患。在极端情况下,如果刀闸处于半合位状态时合上开关,则刀闸动静触头放电,导致刀闸烧损或故障跳闸,扩大事故范围。
预控措施如下。
提升设备运行质量。做好设备维护,运行维护中发现影响刀闸操作的缺陷,生产系统中填报后,同步输出至调度端,由调度员挂牌提示,缺陷未消除前避免操作此刀闸。
远程巡视敞开式变电站。调度远方操作后,可采用无人机、摄像头远程巡视,确认操作到位,室内变电站可采用摄像头远程巡视,确认操作到位。
传感器安装完毕后必须经过反复调试,对刀闸在各种状态下均验证可靠性,经过试用期合格后才能正式投入使用。
3.2 防误操技防手段转换
传统运行人员就地操作,采用技防手段“五防系统 + 电气联锁”。调度远方操作后技防手段转为“间隔五防 + 电气联锁”,而部分老旧站点测控间隔五防不完善。
预控措施如下。
完善变电站测控间隔五防逻辑。
严格验收设备“间隔‘五防’ + 电气‘五防’”,正反逻辑反复效验多次,保证“五防”正确性。
新增二次设备远方遥控防误闭锁系统,使程序化操作应用具备对二次设备的防误闭锁与状态校验等功能。
3.3 刀闸操作异常的应急处置
调度员在进行设备遥控操作时,存在遥控失败、操作失败等异常情况风险。调度远方操作时刀闸未操作到位时突发故障,现场刀闸拉弧。
预控措施如下。
制定刀闸遥控操作不到位异常应急处置方案,并做好宣贯、演练。
刀闸遥控操作异常时调度员应立即停止遥控操作,并加强该间隔的信号监视,通知运行人员检查处理。
重点关注刀闸遥控操作不到位的情况,调度员能进入变电站视频监控系统,发现刀闸拉弧及时做出应对措施,提高紧急故障处置速度。
运行人员接通知后,一组人前往现场,一组人通过远程摄像头、无人机、调度自动化系统初步判断异常情况,快速应急响应。
4 结束语
调控一体化是变电智能运维体系建设的重要一环,而刀闸双确认技术则是关键重要环节,其可靠与否直接影响调度远方判断刀闸位置是否准确可靠,电网是否正常运行,应当引起足够的重视。本文所述为目前所遇到的案例问题及参考优化方案,值得在电网系统内借鉴。不同类型、厂家的设备问题不一,解决思路和方法也不一,具体问题还应具体分析和解决。在实际工作中,运行专业应积极与检修专业沟通协调施工方案是否恰当,图纸是否正确等,防止出现刀闸分合不到位的情况,保障电网安全稳定运行。
