冲压自动焊接机械手设计
2023-11-22詹俊勇王军领仲太生
詹俊勇,王军领,仲太生
(1.扬力集团股份有限公司 自动化处,江苏 扬州 225127;2.南京航空航天大学 机电学院,江苏 南京 210016)
0 引言
近年来,无人化智能化冲压生产线发展迅速。对于传统的焊接工序来说,不仅生产节拍慢,焊接产生的光和有害气体对操作者造成一定危害,使冲压焊接行业招人越来越难,人工成本越来越高。基于此,设计一种自动化焊接系统,满足冲压自动焊接要求势在必行。其中,最为关键和最难的一点就是设计一种自动焊接机械手来代替人工操作。本文针对焊接产品外形和焊接要求,设计出一种自动化焊接机械手,满足凸焊机和螺母输送机的自动化焊接动作需要[1-2]。
1 冲压工件
自动焊接冲压件,材质为碳钢,重量达6kg,冲压完成后需要对冲压件进行螺母焊接,但由于产品为异形件,普通的吸盘吸附抓取和磁铁吸附抓取,都不能保证搬运效率和稳定性,所以必须通过抓取产品才能实现焊接搬运[3]。
2 焊接机械手
2.1 工件抓取和定位
如图1 所示,焊接机械手主要由工件1、接线箱2、三维浮动头3、快换盘4、夹紧气缸5、定位销轴6、传感器7 和存放定位销轴8 组成。三维浮动头用于焊接机械手将焊接工件平稳地放置到焊接机上,避免硬碰硬的接触,保护设备,延长使用寿命。接线箱用于存放保护设备所用气路和电路配件,防止被焊接火花损坏。快换盘固定在三维浮动头的下面,可以对焊接机械手根据不同的产品进行快速更换。活动夹钳由夹紧气缸驱动夹紧焊接工件,将工件抓起,放入焊机中焊接,完成后将气缸松开,工件靠重力自动掉落。存放定位销轴可与快速存放库配合,实现焊接机械手快速更换和存放。传感器对焊接机械手上是否有料进行检测,防止重复抓取或者未能抓取[4-5]。

图1 焊接机械手结构图
2.2 夹紧气缸
夹紧采用焊接专用气缸CKZT40-90T,气缸动作通过电磁阀控制,通过参数表1 可知,气缸夹紧力为1.2kN/0.1m。当夹钳悬臂0.2m 长时其夹紧力为600N,可以夹紧60kg 工件,满足设计要求[6]。气缸参数如表1 所示。

表1 气缸参数
2.3 机械手快换盘
机械手快换装置的快换盘采用机器人侧1 套,工具侧2 套。快换盘参数如表2 所示,通过负载可知此款快换盘可以在悬臂1m 的位置,负载44.2kg 的重量,满足设计要求。

表2 快换盘参数
2.4 浮动头
焊接中需要压紧工件和螺母,为了保证机械手的抓取是柔性而非刚性,要求机械手的结构是柔性连接,所以需要增加浮动头功能,实现工件及抓手之间即无相对位移,又保证机械手和机器人之间是柔性连接,浮动头型号为AGE-S-XYZ-160-0,通过型号表3 可知浮动头在竖直和水平方向可以分别满足60kg 和40kg 的负载,满足设计要求。

表3 浮动头参数
2.5 控制接口和定义说明
为了满足自动化冲压整线协调的需要,机器人和总线模块通讯定义如表4 所示。同时焊接机械手和机器人之间必须做绝缘处理,防止极大的焊接电流通过焊接机械手传递给焊接机器人,造成机器人控制主板和电路的损坏[7]。
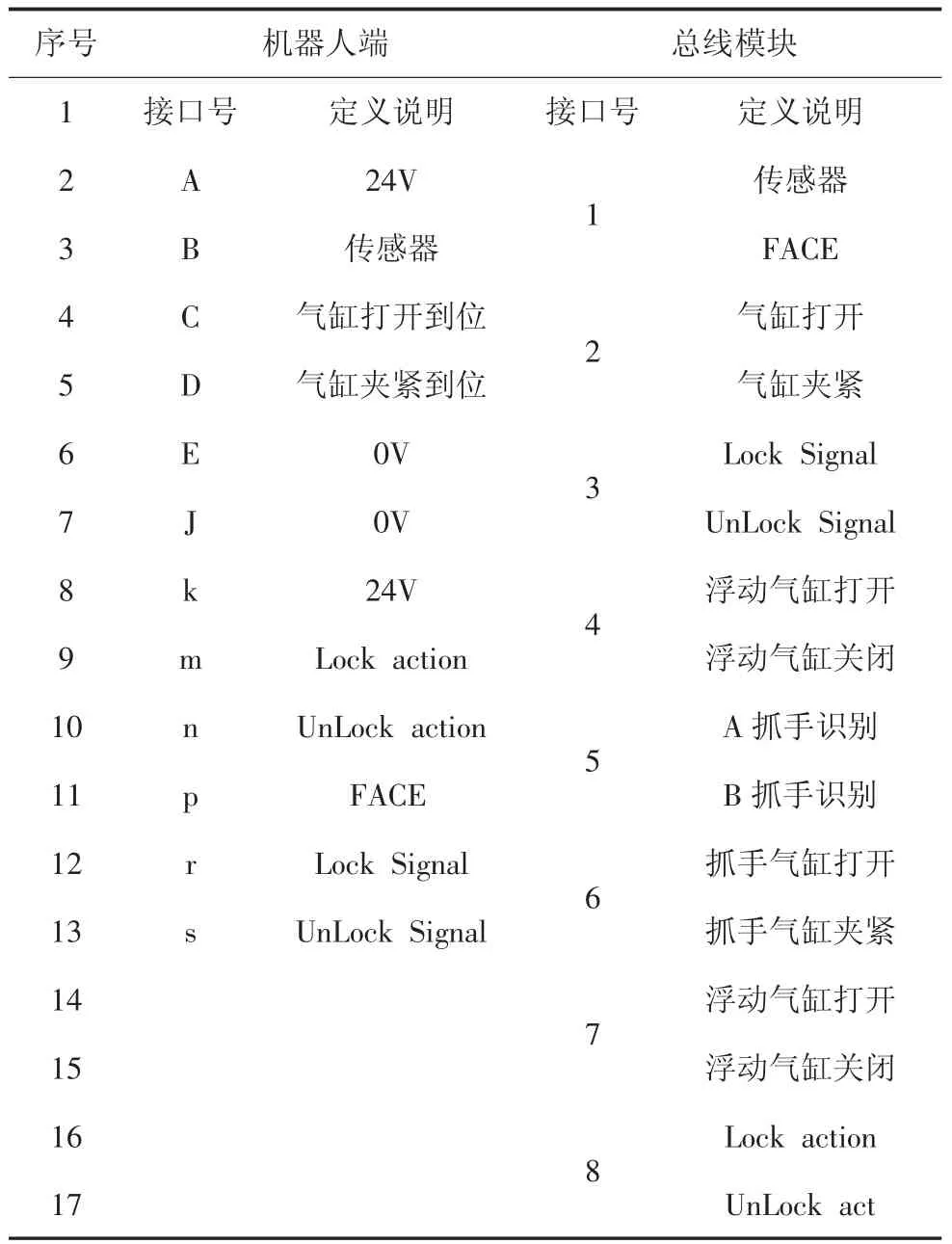
表4 接口号及其定义
3 焊接机械手自动存放
3.1 机械手存放库
焊机机械手主要通过两个销轴定位在自动快换存放库上,其中一个销轴完全约束,另一个销轴对应辅助定位座在X 方向上为腰型销孔,使辅助销轴可以存在位移,防止焊接机械手固定时因过定位卡死。销轴直径设计为ø15mm,固定座的腰型槽长度为22mm,左右间隙总和通常为销轴直径的50%。焊接机械手通过自身重力G 将竖直方向固定约束在快换存放库上,这样就可以节省一套机械手存放自动锁紧装置,在保证快换效果的情况下,降低设备成本。同时销轴孔提供给焊接机械手一个F1的反作用力,辅助托架承担了焊接机械手一部分重量,同时提供给焊接机械手一个大小相等的F2反作用力,用于平衡焊接机械手的重量,使其平稳地放在焊接快换自动存放库。如图2 所示。
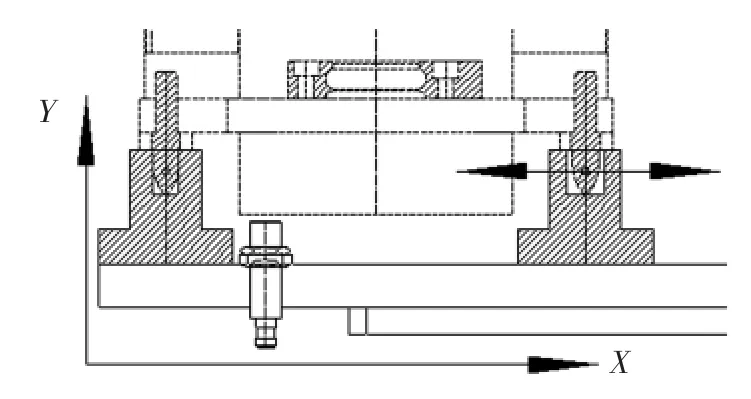
图2 机械手存放定位
存放库原理如图3 所示。当焊接机械手放到快换库并完成更换焊接机械手动作以后,旋转气缸会驱动防尘盖板盖住焊接机械手的快换盘,防止焊接灰渣掉落在快换盘上导致自动更换的故障。焊接机械手更换完成之后会有传感器进行检测反馈给系统,同时快换盘本体也有检测开关,可以检测快换盘是否吸合,保证快换动作的有序性和准确性[8-9]。

图3 存放库原理图
3.2 机械手存放库总线模块
为满足与总线的通讯,完成整个系统控制过程,机械手存放库总线接口模块接口号和定义说明如表5 所示[10]。

表5 总线模块接口号和定义说明
4 结语
(1)根据自动化焊机焊接和螺母输送空间动作要求,设计出了一种结构稳定的自动化冲压焊接机械手,满足了自动化冲压焊接动作和质量要求。
(2)列出了焊接机械手及其自动化存放库的总线模块接口号和定义说明,方便与机器人等总线的自动化对接控制。
(3)设计了一种焊接机械手自动更换存放库,可以根据不同产品快速更换和存放多套焊接机械手,减少换产时间,提高焊接机械手兼容性。
