基于光频标的氢原子钟频率驾驭系统软件设计
2023-11-21徐金锋史丰丰李国俊林勇昕
徐金锋史丰丰李国俊林勇昕
(北京卫星导航中心,北京 100094)
1 引言
随着冷原子物理、激光稳频和飞秒光梳等技术的飞速发展,光学频率标准(光频标)相对频率不确定度和频率稳定度相继达到E-18 水平,已远超现行秒定义参考铯喷泉钟[1,2]。国际计量委员会时间频率咨询委员会(CCTF)针对基于光频标重新定义秒进行了多次讨论,并提出了“秒的次级表示”概念:在基于光频标重新定义秒之前,部分光频标跃迁频率也作为时间基准得到应用[3]。中科院精密测量院利用可搬运光钟测量了钙离子光频标的跃迁绝对频率,并多次参与国际计量局关于钙离子光频标跃迁频率推荐值的计算,为中国在新的国际秒定义制定方面增加了话语权。另外,在光频标绝对频率测量方面,中国计量科学研究院与华东师范大学合作,利用中国计量科学研究院的铯喷泉钟和与国际原子时之间的比对链路,对锶原子光晶格钟和镱原子光晶格钟进行了绝对频率测量,其测量结果被CCTF 采纳,为国际秒的次级表示光频跃迁频率的定值做出了贡献[4]。
原子钟频率驾驭是时间产生和保持中的关键环节,一个理想的参考基准是实现频率驾驭的基础[4]。目前,以铯喷泉钟、铷喷泉钟等基准钟为参考的原子钟驾驭技术比较成熟,光频标在原子时标驾驭方面的应用还处于起步探索阶段。在基于光频标和氢原子钟构成的时间系统中,以光频标为时间基准进行氢原子钟频率驾驭,可以获得具有较高频率准确度和频率稳定度的时间频率信号,但也面临需要解决光频标运行率低带来的测量数据跳变、缺失等问题。因此,利用网络通信、虚拟仪器、计算机数据处理等技术,开发了基于光频标的氢原子钟频率驾驭系统软件,在具有测量仪器控制、数据采集存储、图形化显示等传统功能的同时,能够承担测量数据异常值较多情况下的氢原子钟性能评估、驾驭控制等任务,实现了氢原子钟频率驾驭的自动控制。
2 硬件系统介绍
以光频标为基准的时间系统主要由光频标、氢原子钟、光梳、频率计数器、计算机等设备组成,基本架构如图1 所示。光频标直接输出的频率是参考原子跃迁附近的频率,为了能够与微波频率进行比对,利用光梳实现将特定光学频率转换到微波频率范围[4]。被测氢原子钟的10 MHz 频率信号输入到光梳,利用光频标作为参考源,其输出的跃迁光通过光纤传输至拍频光路,在拍频光路中与光梳的输出光进行拍频。拍频信号通过探测器转化为电信号,再通过同轴电缆传递至光梳用于反馈,经过滤波、锁相等相关操作后,光频标的频率稳定度传递至光梳输出的高频射频信号。
实时采集处理频率计数器的测量数据,可以对氢原子钟频率准确度、漂移等特性进行精确评估,进而建模计算得到氢原子钟的系统变化趋势。最终,通过对氢原子钟输出信号进行频率驾驭,实现高准确度的实时信号输出。为了保障氢原子钟的自由运行,不直接对原子钟的变化趋势进行驾驭,而是通过相位微跃器进行频率和相位的改正,消除其系统变化[5]。为验证驾驭效果,驾驭后的信号MC1 利用比相仪与某标准时间信号MC2 进行比对,并通过分析比相仪的测量数据实现驾驭效果的评估。
3 软件功能实现
3.1 软件开发环境
基于光频标的氢原子钟频率驾驭系统软件运行于Windows 平台,要求具有仪器设备控制和数据处理分析两项基本功能。基于系统配置的频率计数器、相位微跃器、比相仪等设备均支持网络通信的特点,软件开发采用模块化设计思路,把各种软件功能对象化并进行封装[6]。软件采用基于Visual Studio 2015 平台的VC ++语言,与操作系统和硬件平台的兼容性、交互性较好,能够兼顾软件运行效率和接口统一。由于系统处理的数据量较大,数据库选择Oracle 11g,软件通过Oracle 客户端能够方便地进行前后台数据的存储、查询等操作。另外,软件利用可互换虚拟仪器驱动对53230A 型频率计数器等通用设备进行控制,开发环境需要预先安装相应的IO 驱动程序。
3.2 软件流程设计
为了满足不同的测量与控制的需求,系统软件主程序分为全自动模式和人工参与模式。全自动模式下,用户在配置文件中预先设置仪器IP 地址或者Visa 地址、数据取样间隔、计算周期等参数信息,软件启动后全程自动运行,完成测量数据读取、处理及结果存储。人工参与模式下,用户可以任意选择数据取样间隔、计算周期进行数据分析,并可手动对设备运行参数进行设置。软件流程图如图2 所示。
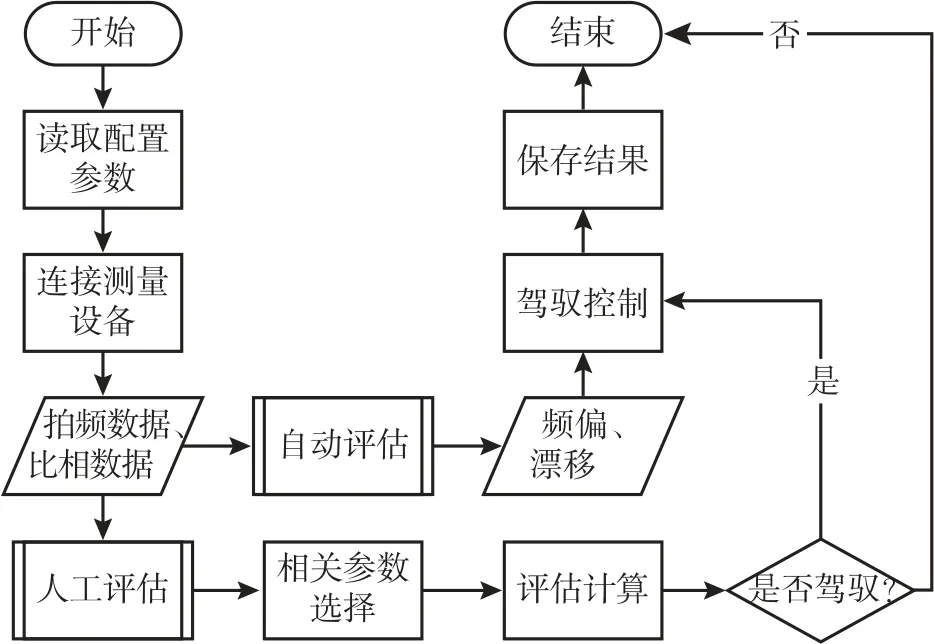
图2 软件执行流程图Fig.2 Flow chart of program execution
3.3 软件主要功能模块
3.3.1 参数配置模块
为增强软件的通用性,参数配置模块通过文件方式对软件自动运行的相关参数进行初始化配置。在系统总体框架不变的情况下,用户可以通过编辑配置文件,改变测量仪器地址、原子钟编号、数据库服务名称、驾驭生效时刻等参数,以适应系统硬件设备更换和运行控制参数调整。正确设置参数后,软件启动时能够自动加载配置文件,建立与设备的通讯连接,开启自动化运行。
3.3.2 数据采集模块
数据采集模块主要负责通过网络与设备进行数据交互,鉴于设备种类不同、协议不同,针对不同协议的设备采用不同的处理机制:
1)针对通过TCP/UDP 协议主动上报数据的设备,软件通过设置设备的IP 和端口号,开启端口监听的方式,接收设备上报到特定端口的数据;成功接收数据后,再通过匹配监听的设备IP 和端口号,获取设备解析协议,对设备上报数据进行解析,并按照时间顺序将数据存储到数据库;
2)针对通过可互换虚拟仪器驱动获取数据的设备,软件通过设置设备IP 地址或者Visa 地址,启动定时查询任务获取设备数据。成功接收数据后,再通过匹配监听的设备地址信息,获取设备解析协议,对设备上报数据进行解析,并按照时间顺序将数据存储到数据库。在编程期间,对可互换虚拟仪器设备的访问是通过其IP 地址字符串实现,软件支持套接字和VXI-11 两种连接协议,为进一步提高性能,优先选择使用套接字协议。以频率计数器数据采集为例,通过软件界面可以实时显示拍频数据,如图3 所示。
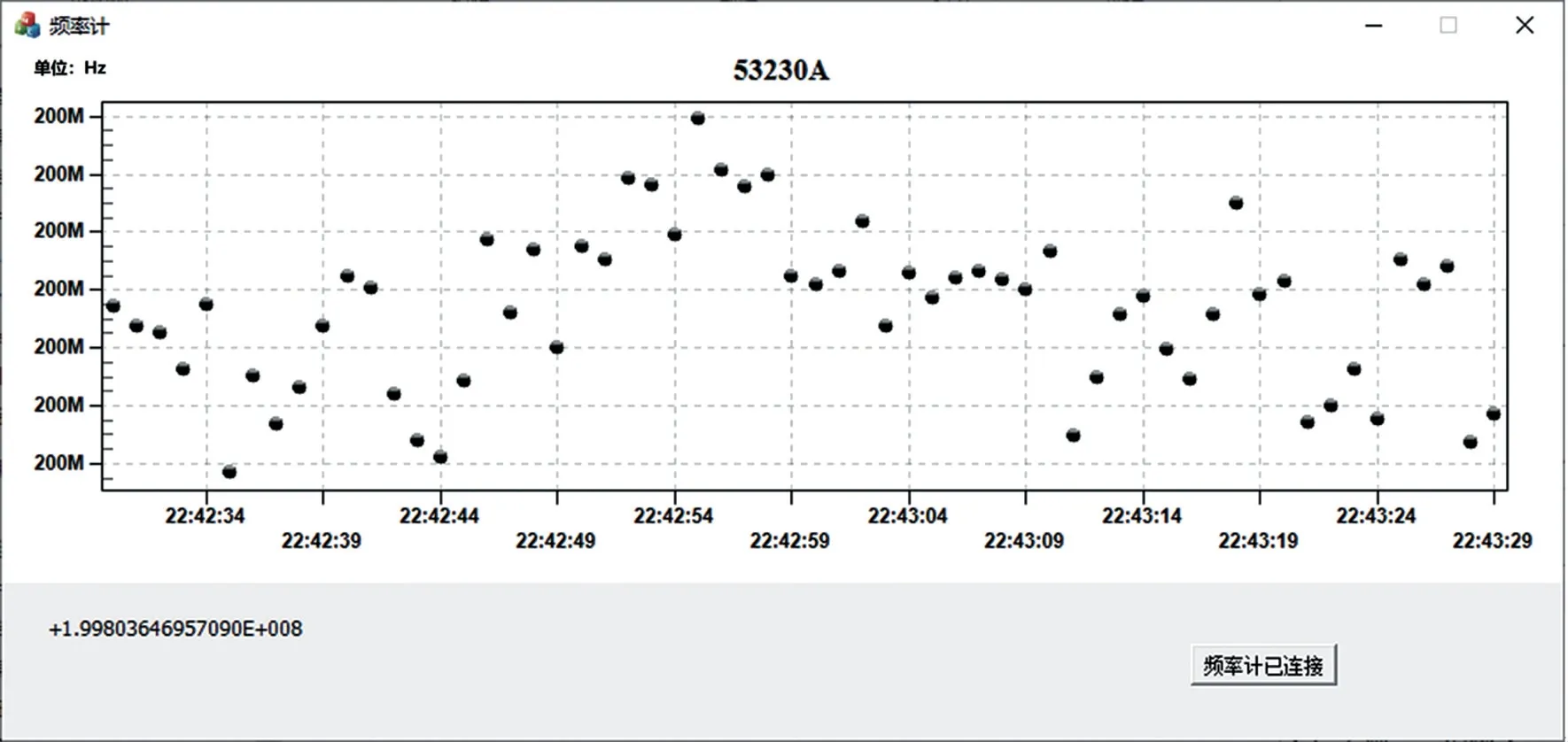
图3 频率计数器数据采集界面图Fig.3 The interface of frequency counter data acquisition
3.3.3 驾驭控制模块
氢原子钟具备较好的短期频率稳定性和低噪声性,但同时伴有长期漂移,因此更好驾驭氢原子钟的重点在于如何扣除长期漂移[7],一般采用二次多项式模型来实现。鉴于光频标的稳定度和准确度都优于氢原子钟,利用光频标驾驭自由运行的氢原子钟,将其输出信号频率在一定误差范围内向光频标靠拢,可以得到较高准确度和稳定度的微波信号。驾驭控制过程中,由于受到光频标运行率、氢原子钟性能或测量设备的影响,原始采集的测量数据不可避免地存在粗差、缺失和跳变等异常,需要通过控制算法对数据的异常点进行检测,确保数据的正确完好,从而避免受驾驭信号稳定度的降低[8,9]。数据异常值的处理主要采用中位差(Median Absolute Deviation,MAD)方法:将频率数据yi的绝对值与频率数据序列的中数(Median)m和MAD 的若干倍之和相比较,当测量数据满足式(1)时,就认为数据点yi是异常的粗差点。
式中:n——整数倍数,根据系统工作需要,其取值设为5;median——求取一组数据序列的中数。
与常规的MAD 方法不同,软件探测出异常数据后,将其对应的频率数据设为空,不对数据序列进行插值处理,从而避免了引入新的数据造成原始数据的失真。数据序列剔除粗差后,将其转化为相位数据进行原子钟频率偏差拟合预报[10]。驾驭控制界面如图4 所示,软件每日利用剔除粗差的拍频数据计算出氢原子钟与光频标的相对频率偏差,进而控制相位微跃器的输出频率。
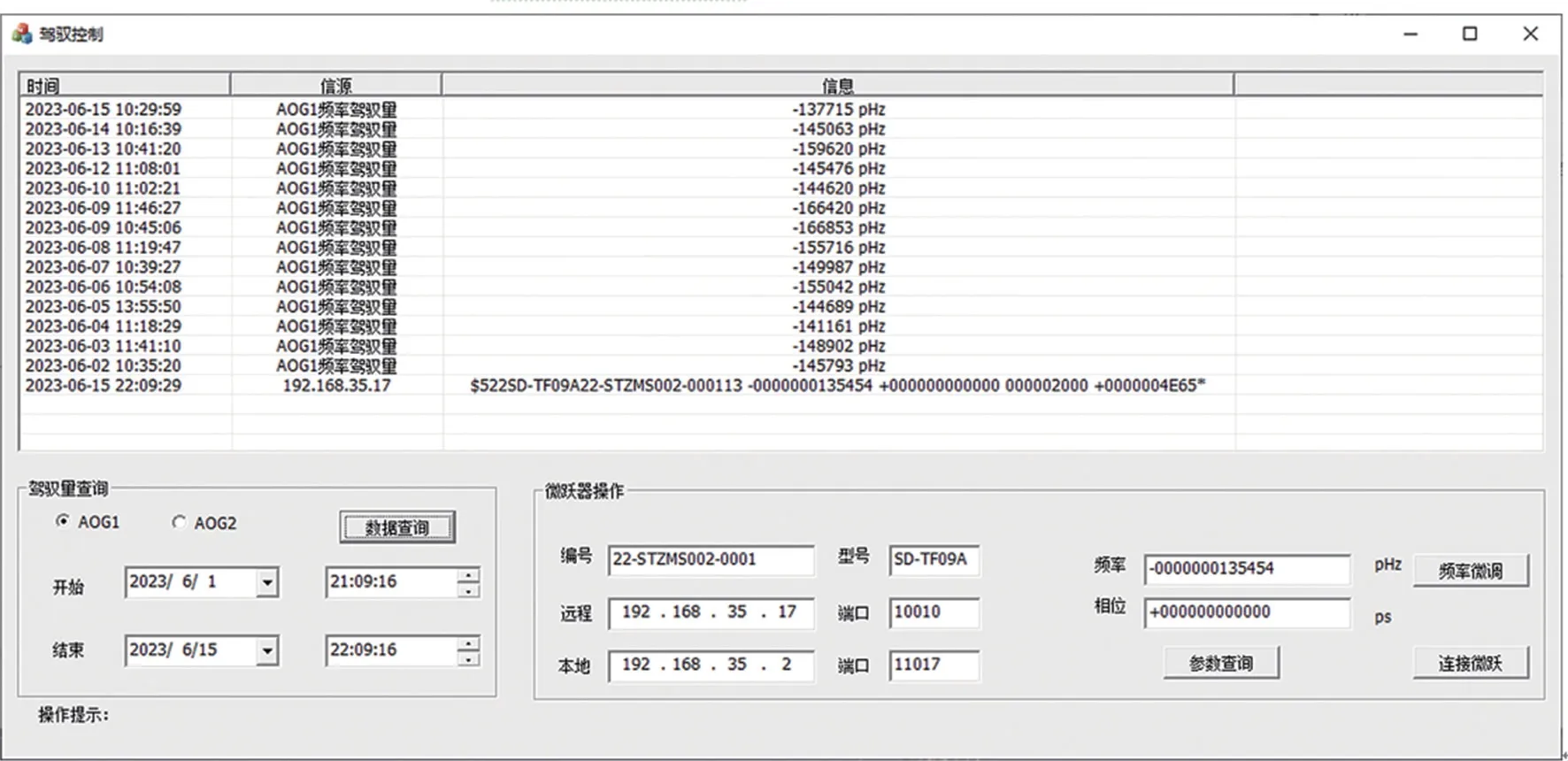
图4 氢原子钟驾驭控制界面图Fig.4 The interface of hydrogen maser's frequency steering
3.3.4 分析评估模块
评估模块使用Alglib 数值分析和数据挖掘函数库,能够高效地进行插值、最小二乘拟合等运算,实现对氢原子钟运行特性的评估,评估结果以图形形式在软件界面呈现,生成的图形可以保存为图片文件。为展示软件利用最小二乘拟合评估氢原子钟准确度和漂移率的效果,自由运行氢原子钟clock1相对于参考时标MC2 的钟差和残差曲线如图5 所示,取样区间1 个月,取样间隔1 min。驾驭后的信号MC1 相对于参考时标MC2 的频率稳定度结果如图6 所示,取样区间1 个月。
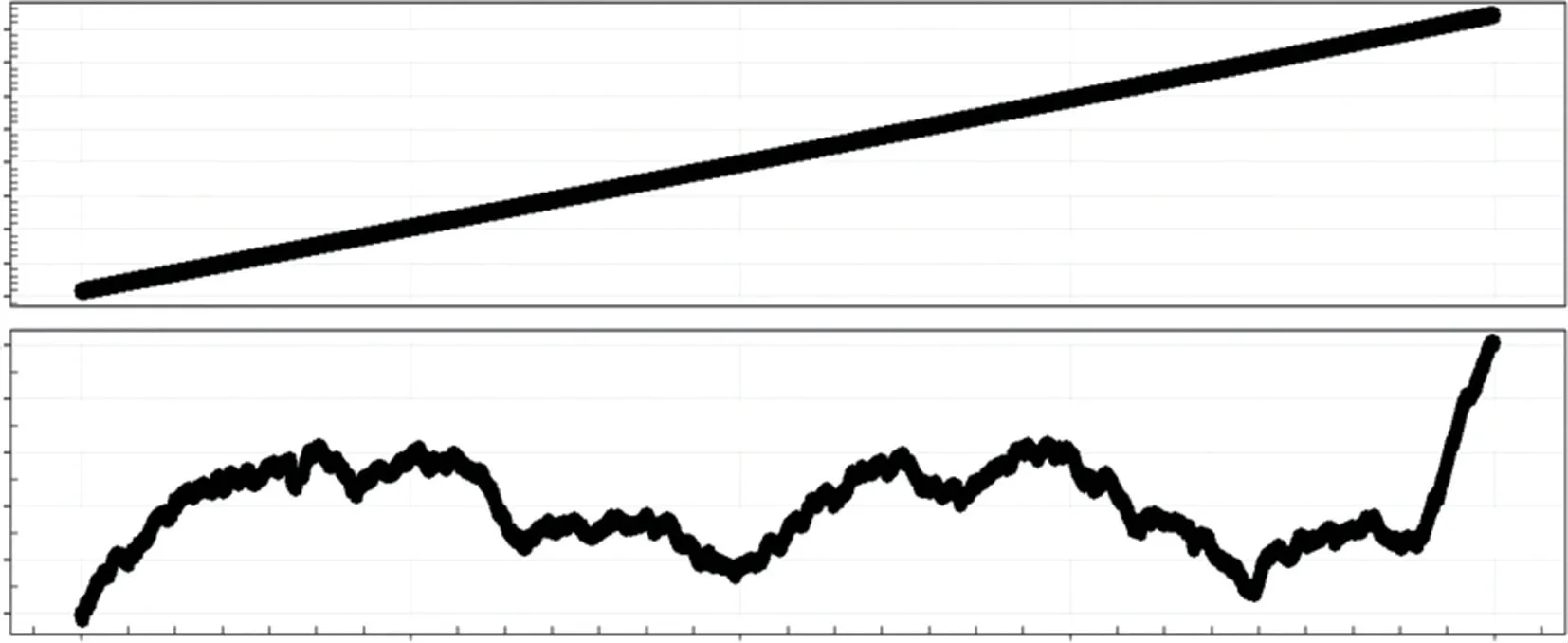
图5 clock1 相对于MC2 钟差曲线图Fig.5 The curve of clock bias between clock1 and MC2

图6 MC1 相对于MC2 频率稳定度结果图Fig.6 The frequency stability results of MC1 in reference to MC2
3.3.5 数据存储模块
数据存储模块用于存储测量数据和数据处理结果。针对系统中的Oracle 数据库,软件采用ADO方式建立应用程序层接口。ADO 库是一组组件对象模型(COM)动态库,封装了数据库底层接口,以统一的方式访问存储在不同信息源中的数据,其优点是易于使用、速度快、内存支出少和磁盘遗迹小,能够为软件前端和数据源之间提供轻量、高性能的接口,从而减少网络流量。软件在调用ADO 前,通过引入ADO 库定义文件,初始化OLE/COM 库环境,并通过Connection 对象执行SQL 命令,或利用Recordset 对象取得结果记录集进行数据查询、处理。通过数据查询界面可以高效地查询数据库中存储的光梳拍频数据,如图7 所示。
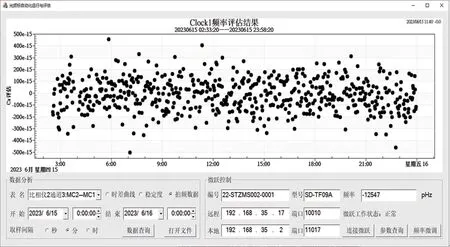
图7 氢原子钟频率数据查询界面图Fig.7 The interface of hydrogen maser's data query
4 软件测试与分析
基于光频标的氢原子钟频率驾驭系统软件设计和开发完成后,通过软件和硬件的配合,系统实现了设备的自动化控制和测量数据的实时采集处理,降低了人工处理数据造成的失误率,减轻了系统运维人员的工作强度。2023 年7 月~9 月,基于硬件系统进行光频标驾驭氢原子钟测试验证,软件每日自动计算氢原子钟的频率偏差值,将计算得到的频率偏差值发送到相位微跃器上,可实现对氢原子钟的频率驾驭。通过与外部UTC 比对进行驾驭效果的验证,两个月时间内光频标的有效运行率为80%,氢原子钟驾驭后的信号MC1 与UTC 的时差绝对值小于2.5 ns,如图8 所示。时差值波动的原因主要是氢原子钟频率驾驭量的变化和比对链路噪声引入的不确定度。同时,MC1 与UTC 之间存在频率偏差,反映出当前的驾驭系统还存在一定的系统偏差,需要在后续工作中进行优化。

图8 MC1 与UTC 的时差结果图Fig.8 The time difference between MC1 and UTC
5 结束语
针对光频标和氢原子钟构成的时间系统,开发了基于光频标的氢原子钟频率驾驭系统软件,对其测量仪器控制、数据采集分析、原子钟评估等功能进行了规划设计。软件采用VC ++语言,基于Visual Studio 2015 平台,界面简洁,操作简单,具备良好的可移植性和可扩展性。经过测试验证,软件运行稳定,在光频标的有效运行率为80%的条件下,氢原子钟驾驭后产生的时间信号与UTC 的同步精度小于2.5 ns。在现有软件系统基础上,未来将研究改进光梳拍频数据有效性的筛选策略和测量噪声分析方法,进一步提升光频标评估氢原子钟特性的准确性。
