基于无人机纯方位无源定位的研究
2023-11-19刘佳李宜超
刘佳,李宜超
(潍坊理工学院 大数据学院,山东潍坊,262500)
1 研究概述
随着时代与科技地飞速发展,无人机的应用逐渐渗透到我们生活中地各个领域,如民事领域中的航拍、微型自拍、救灾救难、快递运输、跟拍野生动物、测量测绘、生活娱乐等;军事领域中的侦察机、靶机等,及大力度拓展的无人机的使用用途,许多发达国家都在积极地发展研究无人机的相关技术。
无人机的遥控原理一般就是利用地面的发射机把有关控制的电信号进行编码,经过红外调制、调幅或无限调制,把信号转换成无线信号发送给无人机。无人机接受信号后,把接收到的无线电波在进行一系列的放大解码等操作,获得最初的控制信号,然后将信号传给相关的元器件进而实现无线控制。但无人机群在进行遂行编队飞行时,为了减少或避免外界信息的干扰,都尽可能地保持电磁静默,尽量地少向外发送电磁波信号[1]。因此需要使用纯方位无源定位的方法来实现对无人机位置的调控,也就是说由编队中的一架或多架飞机发射信号,其余的无人机进行信号的接收,从接收的信号中提取出方向信息进行定位,从而调整无人机的位置[2]。本文根据无人机的编号以及无人机地在编队中相对位置保持不变,建立数学模型解决以下问题:
(1)当位于中心的无人机(FY00)和其他二架无人机发射信号进行定位时,其他接收信号的无人机的位置有所偏差时,如何进行定位的问题;
(2)在只有中心无人机(FY00)和圆周上最多三架无人机发射定位信号的前提下如何进行调整方可使九架无人机均匀分布在圆周上的问题;
(3)当无人机集群是特定位置编队队形(例如:锥形)时该如何设计无源定位的调整方案的问题。
在研究上述问题中,本文基于以下三点假设:
(1)本文仅考虑在无外界各种因素干扰下进行的信号发射;
(2)文中每个无人机保持匀速飞行且位于同一平面上,位置相对静止,无外界因素干扰;
(3)本文只考虑无人机收到信号进行定位。
本文的总体分析流程图如图1 所示。
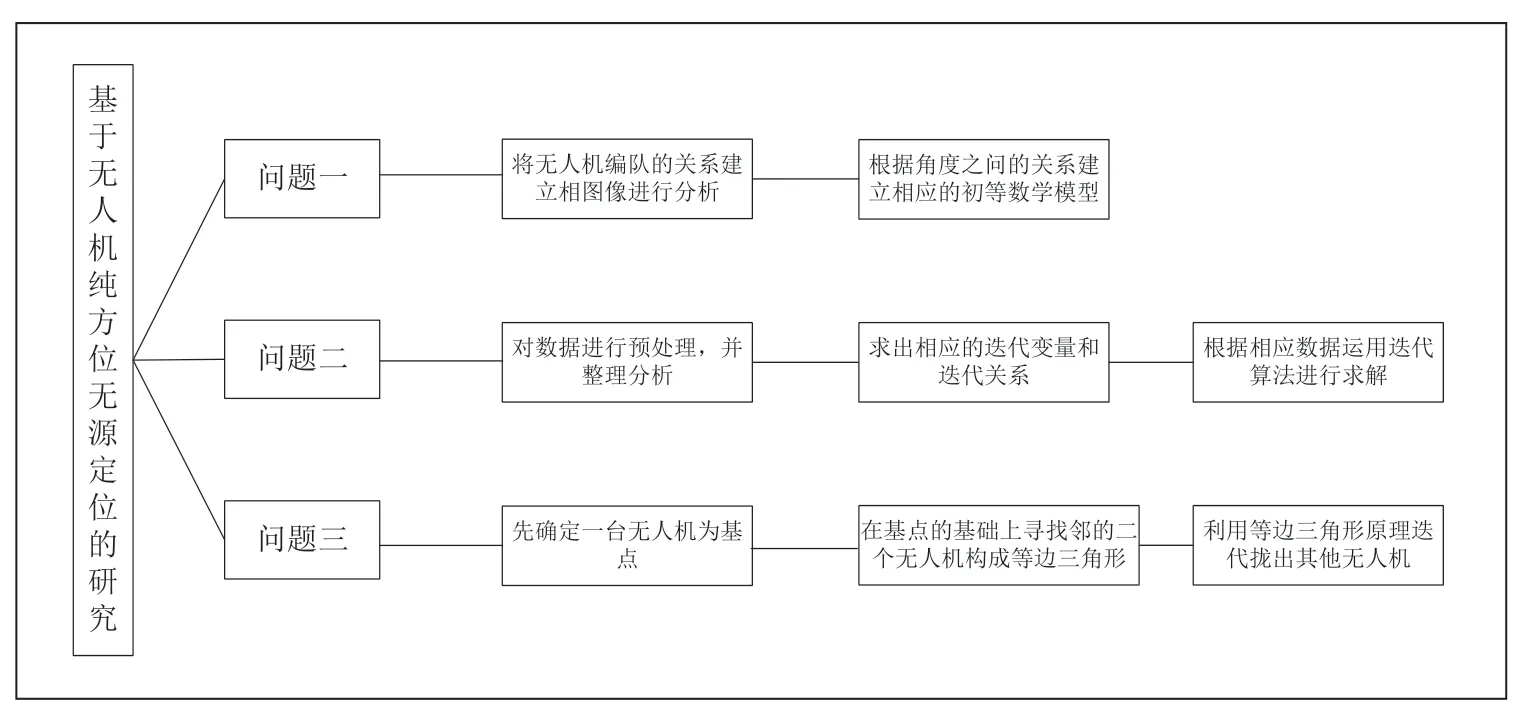
图1 总体分析图
2 无人机定位问题
为了解决当位于中心的无人机(FY00)和其他二架无人机发射信号进行定位时,其他接收信号的无人机的位置有所偏差时的定位问题如图2 中8 所示。本研究通过发射信息无人机与接收信号无人机所形成的夹角进行分析得到标准角度信息,再通过发送标准信息实现无人机位置有效调整,并基于三角函数理论进行分析,进行无人机位置的定位。
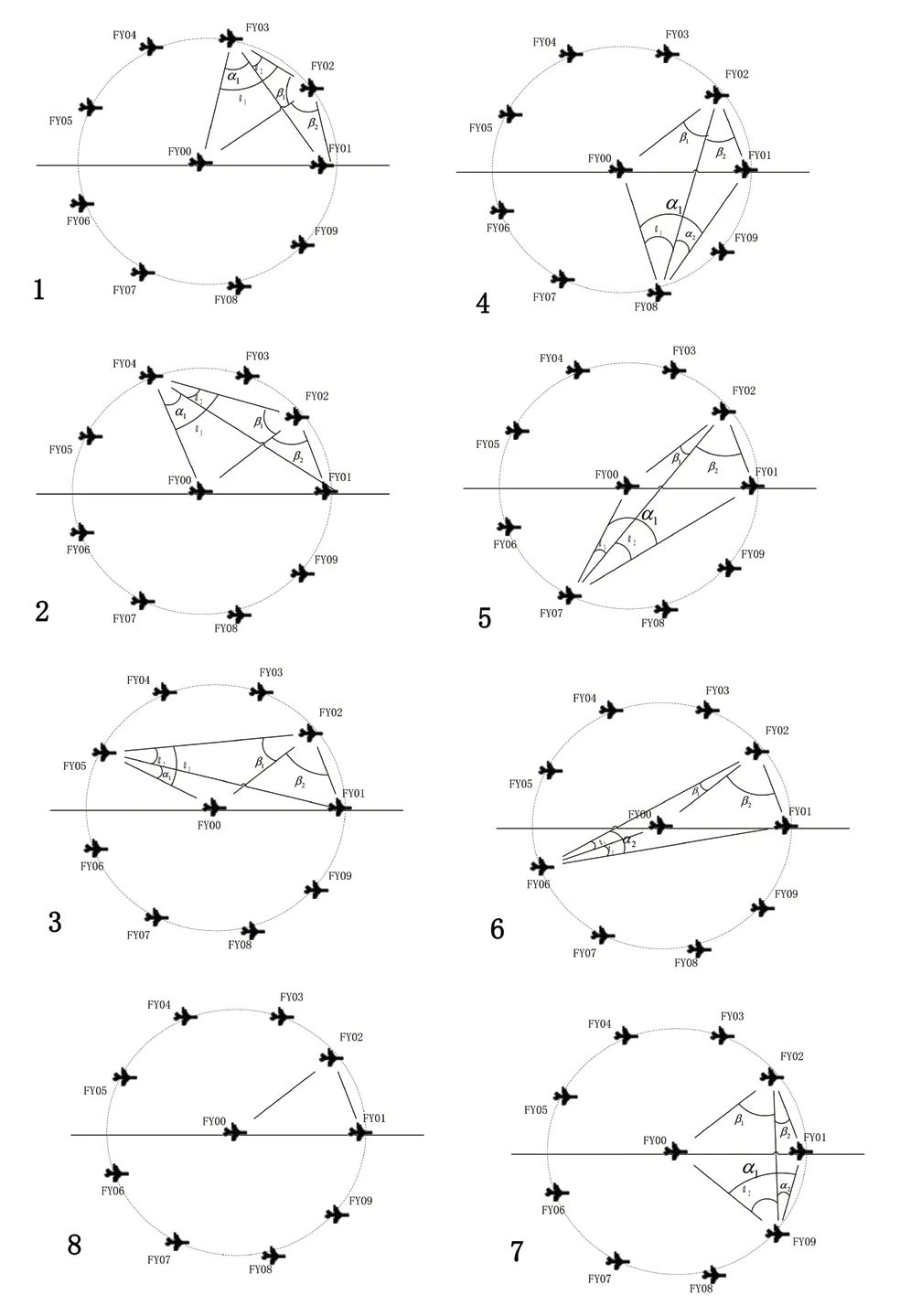
图2 定位图
在无人机进行圆形编队飞行时,无人机均匀分布在圆周上,且利用自身感知高度信息,使无人机均保持在同一高度飞行的情况下,可以分析出无人机的标准位置信息,通过发射信息无人机与接收信号无人机所形成的夹角进行分析得到标准角度信息。通过发送标准信息实现无人机位置有效调整,并基于三角函数理论进行求解,得到了可以利用公式(1)进行有效定位。
注:α1为无人机FY00 和其一已知无人机与矫正无人机夹角;α2为无人机FY00 和另一已知无人机与矫正无人机夹角;1β 为无人机FY00 和矫正无人机与其一(中间)已知无人机夹角;β2为矫正无人机和另一无人机与其一(中间)已知无人机夹角;β3为1β 和 β2的角度和。
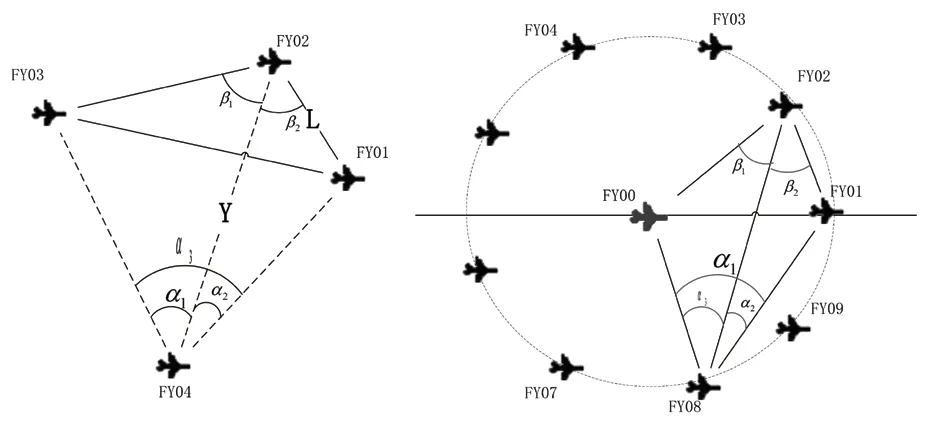
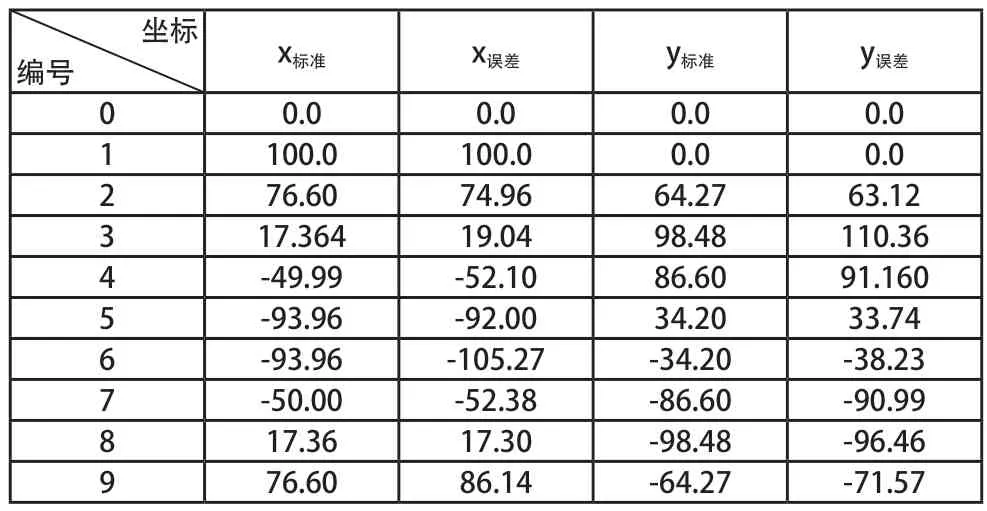
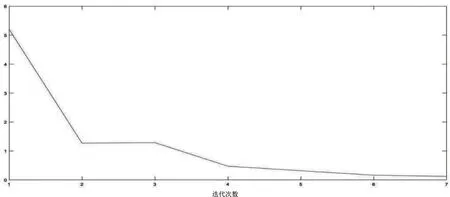
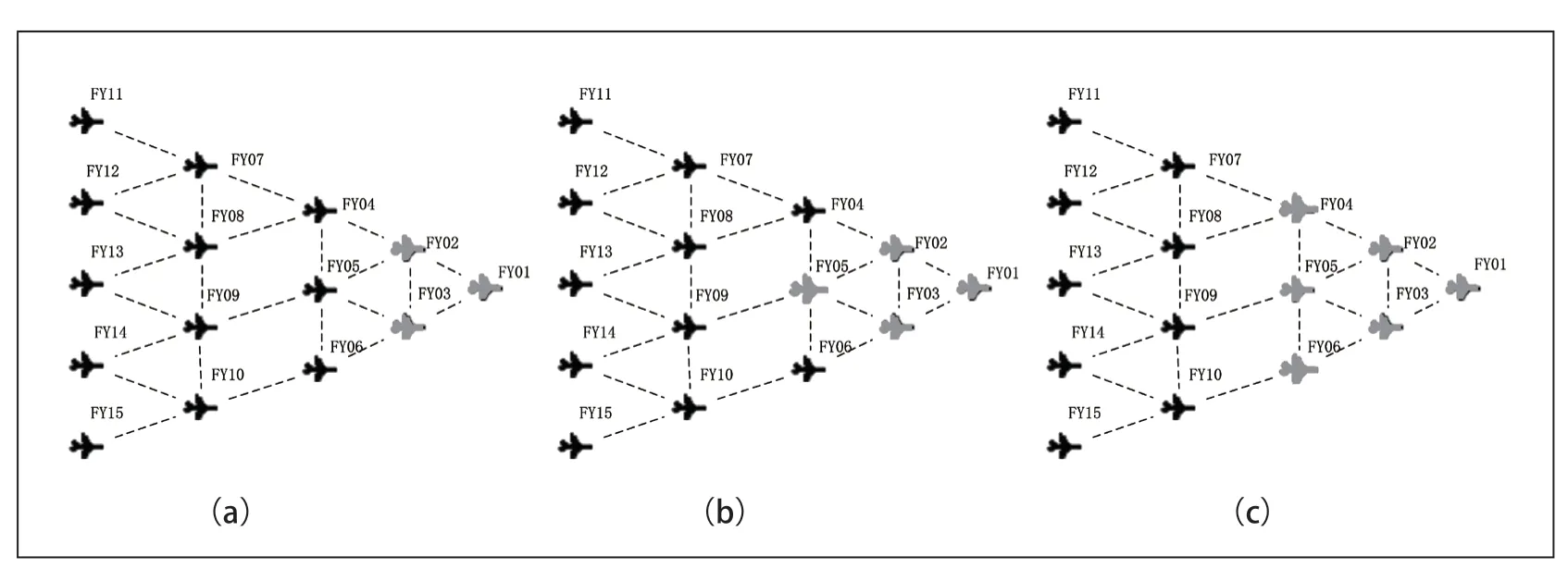
首先根据已知条件确定FY00 与另外两架无人机FY0M、FY0N(0 假设以无人机FY00 与FY01、FY02 为发射信号无人机,确定发射信号无人机后对剩余飞机开始实行逐个依次定位。 在对整个问题进行分析求解之前,首先对大问题进行拆解,拆解成多个小问题,对小问题进行逐一求解,然后进行整理归纳。如图2 中1 到7,假设以无人机FY00 与FY01、FY02 为发射信号无人机,确定发射信号无人机后对剩余飞机开始实行逐个依次定位。接收信息的无人机对所接收的方向信息约定是:接收信号的无人机与任意两架发射信号的无人机进行连线,通过形成的夹角进行相对的位置调整。以假设无人机FY00 与FY01、FY02 为发射信号机为基础对FY0K(3 如图2 所示被动接收信号的无人机都会接收到发射信号的无人机发来的方向信息,并形成相应的角度,通过连线所形成的三角形都为等腰三角形,可以利用等腰三角形的特点通过简单的计算求出每个夹角的大小。数据表1 中△012(以无人机编号的最后一位进行简化△FY00 FY01 FY02 简化为△012,此规则对下文依然适用)中,∠β1=∠α3,∠α1=∠0 13(∠013 为无人机FY00 与FY01、FY03 连接所形成角的简称,此规则对下文依然适用) ∠α1=∠α2=∠α3因为飞机是均匀的分布在圆周上所以∠103=80°∠203=40°,整理可得 ∠α1=(180°-∠1 03)/2=50°,∠α3=∠β1=(180°-∠β1)/2=70°,∠ α2=∠α3-∠α1=20°。依此类推获得多组数据。 表1 模型和角度对应表 基于012-3 模型对所得数据进行分析,发现所形成的夹角有一定规律可循。即模型012-3 与012-9、012-4 与012-8、012-5 与012-7 数据相似只是数据进行了对调,因此在本模型中只需检验012-3、012-4、012-5、012-6 四种模型即可。其余模型013-K、014-K、015-K 验证方法与012-3相同,且部分数据相同或数据位置交换,在此不进行赘述。a 可以通过发射机本身所形成的角β 来使用正弦函数sin 来确定接收机与发射机形成的角度与表1 进行对比检验即可。 定义发射机FY02 与接收机之间的连线为Y,发射机FY01 与FY02 之间的连线为L,如图3(a)所示。 图3 角度图 由图3 角度图中可得分析并通过正弦定理[3]的公式(2)的特性推出公式(3)和公式(4): 注:Y:矫正无人机与其一(中间)已知无人机的距离;L:两已知无人机的距离。 公式(3)与公式(4)整合为: 其中: 对公式(5)进行优化后得: 通过无人机编号FY0K 可以确定∠10K 的角度为40K(0 以模型012-3 为例带入 β1=70、β2=70 时进行模型的验证得:α1=50 °、α2=20 °。 以模型012-5 为例带入 β1=30、β2=70 时进行模型的验证得:α1=10°、α2=20°。 在已知初始位置和推算出标准位置条件下通过计算与比较得出优化过程,使初始位置无限接近标准位置。使用Matlab 软件基于遗传算法进行求解得到无人机初始位置误差值的变化,并对无人机位置优化调整。 根据已有数据可知编号为0 的无人机位于圆心,且位置准确为题目中无人机FY00、编号为1 的无人机位于无人机FY01 的位置且位置准确,9 架飞机应均匀分布在半径为100 米的圆周上可推出无人机的理想化位置。其余无人机均有一定误差,针对这些误差进行比较与分析,确定误差大小,并进行初次排序,利用问题二所得出的结论,选取误差最小的几架无人机,再通过问题一所得结论确定剩余无人机位置信息,一定程度上减小误差,与理想化位置进行比较,确定误差大小进行二次排序。以此类推可以使用优化遗传算法[4]进行多次迭代,使误差逐渐减小,让无人机无限接近理想位置点。 以现有数据为例,将数据进行统一标准整理得出无人机编号和坐标对应表,如表2 所示。 表2 无人机编号和坐标对应表 通过多次迭代,每次使无人机进行一定程度的位置调整,通过位置调整后进行再比较,再调整,在每次调整后进行数据输出、整理,并计算出实际无人机位置与标准无人机位置的误差值,整理结果如图4 所示。 图4 分析图 对误差结果进行分析发现,通过多次调整,使得无人机实际位置与无人机标准位置之间的误差实现了逐渐减小的趋势,并无限接近与标准位置。由此推出,该方法对于无人机初始位置有误差时可以进行有效调整,最大程度的接近标准位置。 在无人机进行锥形编队飞行时,相邻无人机间距应保持相等,在确定发射信号的无人机后,可以利用等边三角形的相关特性进行无人机位置的判定,将信号发送给接收信息位置的无人机后进行位置调整,通过多次递归与调整,使无人机进行有效的位置调整。 当无人机编队进行锥形编队飞行时,应保持相邻两架无人机的间距相等,大的锥形编队应由无数个小的等边三角形构成的小型锥形编队组成。可以确认一个位于角上的无人机为长机剩余无人机为僚机[5],以长机为基准寻找距离为50米的僚机,在两架无人机确认的基础上通过等边三角形原理确定另一架无人机的位置,依此类推便可以将所有无人机进行有效定位。 具体实现步骤如下所示: (1)确定无人机FY01 为长机,以此为基准寻找距离50 米的僚机FY02、FY03 如图5(a)所示。 图5 调整图 (2)通过FY01 与FY02、FY03 利用等边三角形的基本原理等边且角度相等,在规定的锥形编队内可以确定一个或多个点,如图5(b)所示。 (3)依次类推,得到图5(c),后进行多次迭代,可以使剩余的僚机实现有效定位。 本文以无人机在进行编队飞行时如何使用纯方位无源定位方法为研究对象,在对无人机均保持一定高度且均匀分布在圆周上为基础,找到了一种基于正弦函数的计算方法,并建立与求解了相关的模型。 模型的优点: (1)建立的模型和算法与实际紧密联系,结合实际情况可以对问题进行求解,更加接近实际应用场景,具有较高的通用性。 (2)本文建立的模型具有很强的创新性,使用基于正弦函数的算法新颖,简化计算流程。 改进之处: (1)文中所建立的模型仅仅适用于二维情景中,在实际的使用中应加入空间变化所产生的相关变量。 (2)模型的使用情景过于理想化,忽视了环境带来的影响,在实际应用中需要加入类似于风速变化、电磁干扰等变化因数对飞行编队产生的影响。 模型推广: (1)抗电子干扰能力强。无人机可以携带纯方位无源定位设备进入高空,可以极大程度地减少地面其他杂波产生的信号干扰。 (2)作用距离更高更远。可以使无人机在高远距离进行飞行作业时接收到比地面更强的信号,实现高难度精准作业。 (3)在民用领域,模型通过改进后可以实现三维有效定位,在日常使用中实用性更强,例如利用无人机在空中进行三维动作展示,进行相关的无人机飞行表演。 (4)在军事领域,纯方位无源定位无人机,在执行秘密任务时可以极大增强生存能力,降低了被发现的概率。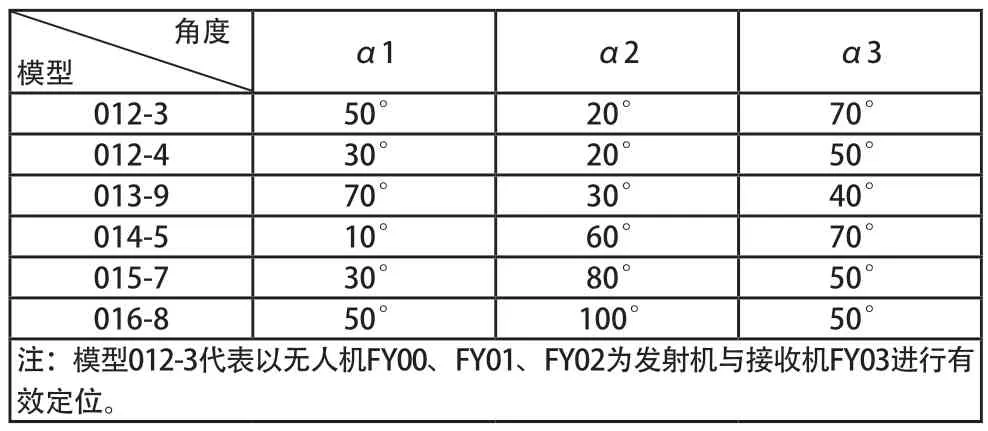
3 九架无人机均匀分布问题
4 无源定位调整方案
5 模型评价、改进与推广
