基于改进三维块匹配滤波的红外全息降噪算法
2023-11-17李亚轩张永安王俊迪郗加民张云浩杨永浩
李亚轩,叶 飞,张永安,王俊迪,郗加民,张云浩,杨永浩
(1.昆明理工大学理学院,云南 昆明 650500;2.云南省现代信息光学重点实验室,云南 昆明 650500;3.昆明荣者光电科技发展有限公司,云南 昆明 650500)
1 引 言
数字全息技术是一种将传统光学全息技术与数字图像技术相结合的技术,因其可以记录和显示物体的三维信息并且易于使用,在众多领域中得到了广泛的应用[1]。随着数字全息技术在更加广泛领域的应用[2],红外全息检测技术也发展起来。红外全息技术对比可见光全息技术有着光源能量高[3]、光源波长对抗复杂环境能力强、相干距离长、干涉能力稳定的优点[4];使得红外全息有不易受可见光干扰[5]、穿透烟雾火焰能力强[6]、对实验稳定性要求低[7]、长距离大目标成像能力强[8]的优点。使其成为解决无损检测[9]与火场救援[10]等现有难以解决领域的最优方法。
红外全息技术作为全息技术与红外技术[11]的分支,在长距离传播时会使光线能量衰减严重,到达物光系统中的焦平面能量低,导致图像质量较差,图像噪声复杂,影响后续处理[12]。针对红外全息图进行图像处理的需求也在逐步增长,而对于红外全息图的传统图像处理方法主要集中于对噪声的抑制;如在2016年王洋等人通过在整幅图像中寻找与噪声点具有结构相似的像素区域作为滤波区域,将图像中噪声点进行滤波放到整幅图像中进行考虑,这种非局部均值滤波方法能够对红外图像的高斯噪声进行降噪,同时使得滤波后图像信息失真程度低,该算法能够在对噪声进行良好抑制的同时具有较好保持边缘信息的性能[13]。2017年,张勇提出了一种基于动静态检测算法的红外图像降噪算法。通过一种动静态检测算法将图像分成动态图像和静态图像,用改进的自适应维纳滤波算法处理动态图像,用改进的非局部均值(NL-means)降噪算法处理静态图像,并用现场可编程门阵列实现红外图像降噪系统设计。其峰值信噪比(Peak Signal-to-Noise Ratio,PSNR)和细节方差-背景方差比(Detail Variance -Background Variance,DV/BV)均高于经典降噪算法,该算法能有效减少图像中的高斯白噪声,并能很好地保持图像的边界细节信息[14]。2017年,为了消除红外全息中显著的散斑噪声,刘宁提出了一种基于使用拉普拉斯金字塔技术,并在每层上进行双边滤波器以区分噪声和细节信息。从而对红外数字全息图散斑噪声进行抑制的新技术;由于双边滤波器无法区分所有噪声,因此设计了一个改进的中值滤波器来过滤剩余噪声。该技术在噪声抑制中的红外数字全息图上有效工作,从而去除了红外全息图像中大多数的散斑噪声[15]。2018年,国外Bianco,V.使用多种联合三维块匹配滤波(MLDH-BM3D),这是一种特别适合过滤数字全息(Digital Holography,DH)图像的方法;它将多个DH捕获与三维块匹配滤波算法(Block-Matching and 3D Filtering,BM3D)相结合,利用对象特征的非常稀疏表示而设计的一种数字滤波器;这种方法对全息图像中的散斑噪声与高斯白噪声有很好的抑制效果,能够使红外全息图像实现了无噪声数字全息重建[16]。而这些对于红外图像的降噪方法对红外全息图像降噪得到结果的信噪比较低并且细节缺失严重[17],并且其运算效率与图像质量也存在不足。而BM3D作为较为优秀的降噪方法[18],在红外全息图像处理中,利用BM3D算法的特点对图像中的高斯噪声与散斑噪声同时处理能够得到对图像进行更好的降噪处理[19],但是其对细节的保留与对红外图像的适应性较差,需要对BM3D算法的各个部分进行改进使其适用于红外全息图像的降噪处理。
本文基于三维块匹配滤波算法对红外全息图像的降噪原理,提出了一种对高斯噪声尤其是加性高斯白噪声与红外全息图散斑噪声同时进行处理,提升滤波算法的对细节的保留与对红外全息图像的适应性,得到针对红外全息图像得到更好降噪效果的改进三维块匹配滤波算法,通过与现有传统方法进行对比来验证算法的性能。
2 基本原理
2.1 红外全息图记录与噪声分布
红外全息技术是基于数字全息技术与红外技术结合的全息技术。红外全息技术的基本原理与可见光波段的激光为光源的全息技术基本原理相同,都是对全息基本原理的运用,即对波前信息的采集记录与重构再现。
红外激光由于波长在760 nm以上,不能被肉眼观察到;为了收集红外全息图,基于马赫-曾德尔(Mach-Zender)干涉光路对红外全息光学装置进行改造,使用绿光作为引导与红外光进行拟合,使红外光与绿光通过分束镜所分束的两束光的光路相同,通过绿光的可见的干涉条纹来判断红外条纹的清晰程度,红外全息光学装置如图1所示。

图1 红外全息光学装置
其中,红外全息实验所使用的激光器是中心波长为1064 nm的在连续模式下工作的半导体红外激光器及波长为632.8 nm的He-Ne激光器,其中He-Ne激光器用于与红外光拟合后引导光路搭建;红外激光最大功率为115.3 mW,横模模式为TEM00,发出光束发散角为1.5 mrad,光束直径为1.329 mm,相干长度为20 cm。使用的光学镜片均为普通透红外透镜,分束镜Ⅰ分光比为1∶2,分束镜Ⅱ分光比为1∶1,扩束镜放大倍率为25倍,针孔尺寸为10 μm。本文选用CCD分辨率为1920×1080,像素尺寸为2.9 μm,曝光时间设置为0.2 ms,再现距离为104.5 mm。样品为投射式样品“光”字,材质为黑色不透光的亚克力板(如图2),规格为50 mm×50 mm,厚度为3 mm,字大小20 mm×15 mm,字笔画宽度为2.5 mm。
图2 透射式样品“光”图像
在数字全息测量系统记录过程中,当激光照射到物体表面时,由于激光的高相干性,任意物点的散射光与其他物点产生的散射光发生干涉,从而形成了无规则分布的散斑图样,这种噪声被称为散斑噪声[20]。
在数字全息系统中,散斑噪声往往被看作是降低全息再现像质量的一种乘性光学噪声。[21]数字全息记录过程中,设散射面上有N个独立散射点源,散射表面上随机散射点q(x,y),此时接收面P上基元光波的复振幅为:
E(P)=α(x,y)exp[jφR(x,y)]exp[jφ(r)]
(1)
式中,α(x,y)为散射表面反射光的振幅;φR(x,y)表示散射表面不平整所引入的随机相位;φ(r)表示光传播相位因子。
接收面P的复振幅由N个独立散射点源光波传播到该点的叠加。此时P点散斑噪声引起的光强变化表示为:
I(P)=|E(P)|2=
(2)
全息图上记录面上光强分布为:
I(x,y)=U(x,y)U*(x,y)=|O|2+|R|2+O·R*+R·O*+IR(P)
(3)
式中,O与R分别代表物光与参考光;IR(P)代表噪声引起的光强变化。按下式计算:
IR(P)=I(P)+IGauss(P)
(4)
式中,I(P)为散斑噪声所引起的光强变化;IGauss(P)为高斯噪声等其他环境因素所引起的光强变化。
2.2 三维块匹配滤波算法
三维块匹配滤波算法(BM3D)借鉴了非局部均值方法的非局部块匹配思想[22],通过将相似判定的二维图像块找出作为参考块,再将其通过三维变换组合成三维群组并对群组进行协同滤波处理,最后将处理后的块聚合到原图像块位置得到更好滤波结果的传统降噪算法[23]。BM3D滤波算法的过程由两个阶段所构成,即初步估计阶段与最终估计阶段,每一阶段由块匹配、协同滤波与聚合三部分构成,如图3所示。
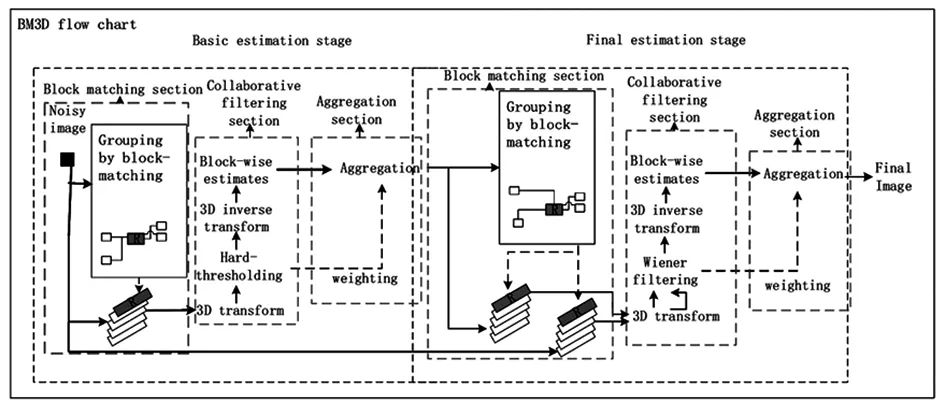
图3 BM3D流程图
如图3中初步估计阶段为基础估计。首先是进行按块估计,对于噪声图像中的每一个块,首先利用块匹配参数找到所有与图像相似的相似块,块与块之间的匹配度可以表示为这些系数的均分误差,即:
(5)
(6)

(7)
然后通过相似判定将相似的二维图像块三维变换组成三维群组作为块匹配(Block-matching)。随后进行协同硬阈值滤波处理,对三维群组通过硬阈值滤波进行降噪,再进行三维反变换得到所有分组的块估计,并将其返回初始位置。BM3D算法中使用的为硬阈值处理,利用硬阈值滤波来对图像进行初步估计,估计可用式(8)计算得到:
(8)
(9)

(10)
最终估计阶段为使用基础估计后进行改进的分组操作与协同维纳滤波。通过按块估计,对于每一个块的分组上,使用基础估计中得到的块进行块匹配(BM)找到与当前处理块近似的所有块的位置,使用这些位置形成源于噪声图像与基础估计的两个数组,对上述两个数组进行三维变换。随后利用协同维纳滤波处理,使用基础估计的能量谱对原始噪声图像进行维纳滤波,对滤波后的三维系数进行三维逆变换来生成所有分组块的估计,并将其返回初始位置。最后将加权平均对所有局部估计进行聚合,计算出真实图像的最终估计。即为:
(11)

(12)
2.3 改进BM3D算法
为了使BM3D算法更好应用于红外全息图像的降噪,采用对硬阈值滤波和维纳滤波同时改进的方式来改进BM3D算法。
由于硬阈值滤波需要对每一个块进行计算,而图像噪声和细节拥有一定的相似度,会导致降噪的同时出现细节的丢失。在硬阈值滤波前可先利用傅立叶阈值和再滤波对图像中的细节信息进行增强,从而将细节信息与噪声区分开来。然后再滤波,在实现去噪的同时对细节信息的有效保留。

(13)
(14)
其中,aΔ为3σ检验,F表示傅里叶变换:
(15)

z1=g(xi,yi)*z
(16)

(17)
(18)
(19)

(20)
(21)
(22)
通过改进BM3D中硬阈值部分与维纳滤波部分,使得BM3D算法对红外全息图像的适应性与滤波效果提升,并且其保留较多的细节,能够更好的对红外全息图像中的噪声进行降噪处理。
3 实验验证
为验证本文提出方法的有效性,选用传统BM3D滤波、非局部均值滤波、自适应维纳滤波和传统BM3D滤波作为对照组,与本文的改进BM3D对比。实验中使用实拍红外全息图像(图4)的滤波结果与模拟的洁净环境下红外全息图像(图5)进行了对比,使用峰值信噪比(PSNR)与结构相似性指标(Structural Similarity Index Measure,SSIM)作为滤波效果优劣的评判标准。
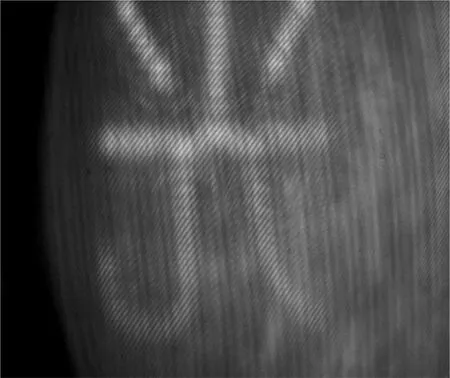
图4 实拍红外全息图像
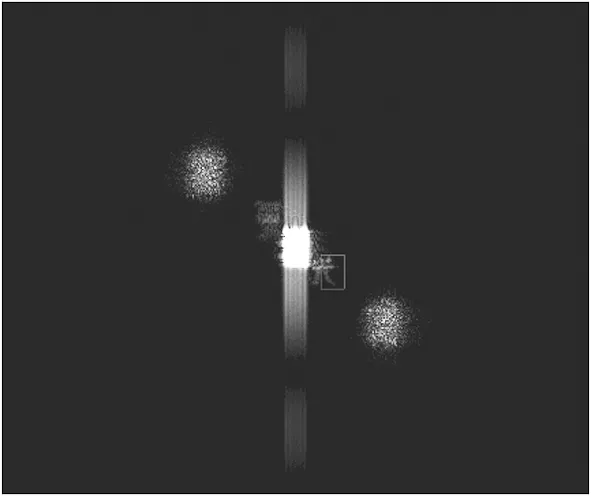
图5 实拍图像再现像
图4为图1所示的红外光学装置对透射式样品在大场景下的红外全息图像,模拟了在大场景下所呈现的具体图像,与可见光全息对比,红外技术对于大视场全息效果更好。图5为实拍图像的再现像,可以看出除了理想环境下的正负一级与零级像外,还存在其他部分的图案,这些图案就是全息成像时存在的环境噪声与乘性散斑噪声。图6为添加噪声方差0.02的乘性噪声后的红外全息图像,模拟了复杂环境下噪声对红外全息图像的影响。图7为图6图像的红外全息图像再现像,可以看出噪声部分明显变亮并影响了图中再现像“光”的分辨率,其证明噪声对红外全息图像无论是原始图像还是再现像都有所影响。
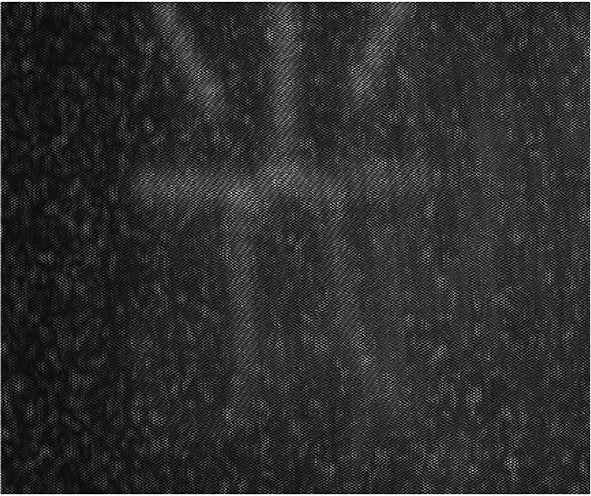
图6 添加噪声方差0.02的乘性噪声红外全息图像
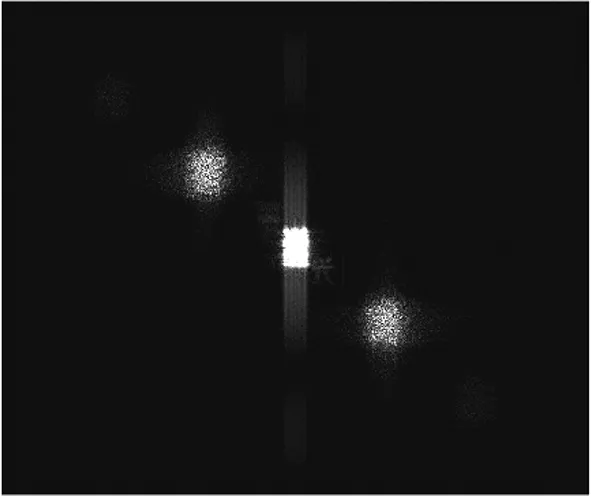
图7 添加噪声后红外全息图像再现像
为了检验改进算法针对不同类型噪声的降噪效果与算法性能,本文在采集的全息图中人工添加了不同强度的乘性噪声(包括高斯白噪声与乘性散斑噪声),并对其进行了降噪处理。图8中,由上至下,各行图像添加了噪声方差为0,0.02,0.05,0.2,1的乘性噪声;自左向右,各列图像所采用的降噪方法分别为3×3邻域滤波、自适应维纳滤波、BM3D滤波和改进BM3D滤波。从图8中可以看出,随着噪声方差的增大四种方法的降噪效果均有所下降。其中,3×3邻域滤波与BM3D滤波的降噪效果在噪声方差等于0.05时明显下降。自适应维纳滤波与改进BM3D滤波降噪效果则变化较小。当噪声方差达到0.2时,由于3×3邻域滤波与BM3D滤波的降噪性能不足以去除大多数的噪声,对于BM3D滤波方法当增加性能则时也会导致块匹配部分过度整合的问题;上述问题使得3×3邻域滤波与BM3D滤波降噪后的图像完全看不到图中的“光”,表明此时这两种滤波已无法实现有效降噪。自适应维纳滤波降噪后的图像,在方差为0.8时,虽能看清“光”字,但图像清晰度已有明显下降;在方差为1时,自适应维纳滤波会同时对图像与噪声产生过度抑制,使得图像清晰度大幅下降,仅部分“光”可隐约看到。表明该方法降噪效果优于前两种方法。改进BM3D滤波的降噪图像随着噪声方差的增大,图像对比度及“光”字清晰度均有所降低,但图像质量下降小,即使噪声方差达到1仍然可以清晰看到图像中的“光”。表明改进BM3D滤波算法可以在降噪的同时有效保留原图像中细节信息,降噪效果明显优于其它三种降噪算法。
图9为采不同滤波方法的PSNR值数据图。自适应维纳滤波与改进BM3D滤波在噪声方差0.05时其PSNR值变化较小;而在噪声方差为0.2时,自适应维纳滤波的PSNR出现了明显下降,当噪声方差达到1时,其PSNR值已经下降至25以下,表示此时图像质量已经出现明显的下降,不能很好的分辨图中的细节,但依然优于前两种方法。改进BM3D滤波的PSNR值随着噪声方差的变大逐渐减小,表示其图像的分辨率也有所降低,但是其下降的幅度较小并且下降曲线较为平稳;在0.02噪声方差之后其PSNR值没有出现大幅度变化,即使在噪声方差为1时PSNR仍然保持在40左右;通过PSNR值得变化,证明改进BM3D滤波可以在降噪的同时能够有效的保留图像的细节信息,降噪效果明显优于其他三种降噪方法。
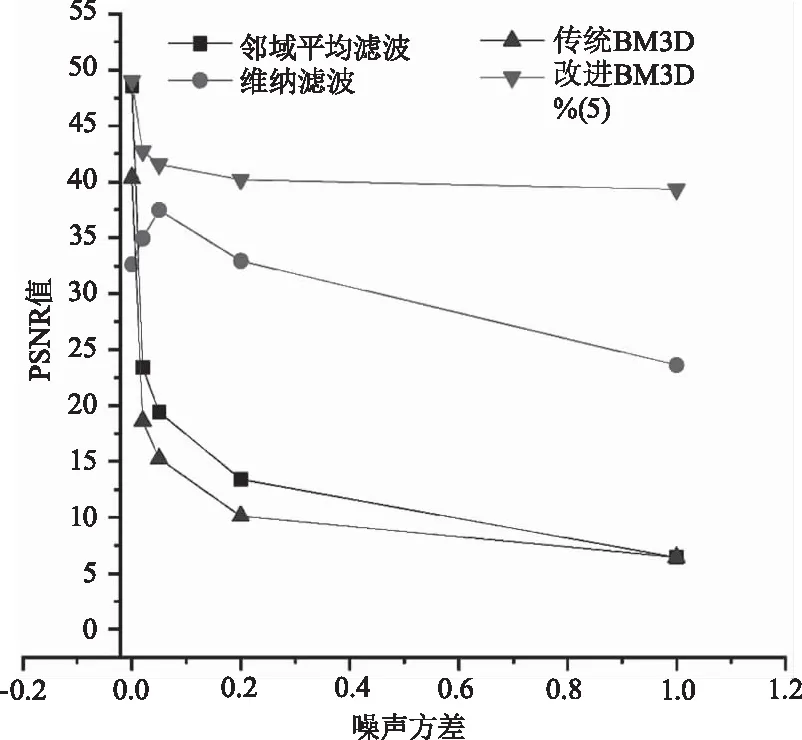
图9 不同滤波方法的PSNR值数据图
图10中(a)为非局部均值滤波对红外全息实拍图的滤波后的再现像图像,通过再现像可以观察到非局部均值滤波算法对再现像中的噪声没有很好的去除效果,其对红外全息中的乘性噪声与环境噪声降噪效果不是很理想。(b)为自适应维纳滤波对红外全息实拍图的滤波图像后的再现像图像,图像噪声有部分除去但依然有噪声的残留,字体较为清晰可见。(c)与(d)分别为传统BM3D滤波与改进BM3D滤波对对红外全息实拍图的滤波后的再现像图像,图像中噪声降噪效果较好,可以表明这两种滤波已可以对绝大多数环境噪声与散斑噪声进行有效的降噪。而对于“光”字体,传统BM3D滤波的成像效果明出现有部分模糊,其对再现像的细节的保留不够;而改进性BM3D滤波的再现像可以清晰可见的看到图像中的“光”且噪声去除程度较大。表明改进BM3D滤波算法可以在降噪的同时有效保留原图像中细节信息,降噪效果明显优于其它三种降噪算法。

图10 不同滤波方法对原始图像的降噪后的再现像
4 结 论
红外全息图像由于红外全息技术图像的环境噪声和散斑噪声较大的缺点,而目前的降噪方法无法满足降噪需求,所以本文提出通过引入全局傅立叶阈值和再滤波技术与自适应维纳滤波对BM3D降噪方法改进,使其能够对红外全息图像进行降噪。通过对比现有方法降噪效果利用PSNR与SSIM进行质量评估来验证,并通过全息再现像图像中噪声区域与物体区域的比对,证明改进三维块匹配技术能够对红外全息图像降噪得到更好的图像与再现像并且保留更多图像细节。
