基于新型全景光电的超近空防护系统设计
2023-11-17李丽亚刘京生管康萍张泽彬
李丽亚,刘京生,管康萍,张泽彬
(1.中国电子科技集团有限公司第十一研究所,北京 100015;2.陆装北京军代局驻北京第二军事代表室,北京100020;3.中国人民解放军93128部队,北京 100036)
1 引 言
“低慢小”目标是低空慢速小目标的简称,是指具有“低空超低空飞行、飞行速度较低、不易被侦察和探测发现”等特征的各种小型航空器和空漂物的统称。通常是指飞行高度在相对高度200m以下,飞行速度(巡航速度)低于55 m/s(200 km/h),较小尺寸或红外特征不明显的各种空中飞行器。随着“低慢小”无人机的技术发展,可通过空中侦察、自杀式袭击、抛撒传单等手段威胁治安区域,对“低慢小”无人机的探测、处置能力已经受到广泛关注[1-6]。
近年来,国内外针对“低慢小”目标的探测和处置展开了深入研究。文献[7]在系统层面上提出新型“低慢小”目标探测处置体系建设方案,针对新型目标和城市场景的特点,构建指挥控制、预警探测、多元化处置的防控体系。文献[8] 对基于雷达、光电、无线电、声波等多元化技术手段针对“低慢小”目标的探测与识别方法进行了分析,讨论了现有的反无人机技术、典型的反无人机系统以及无人机集群对抗系统效能,为解决低空安全问题奠定了基础。文献[9]深入剖析了无人机集群对要地防空的威胁,传统防空系统在近低空能力的有待加强,亟需加强相关反制能力建设等问题,提出了“环形部署,梯次防御,尽远设防,灵活布防”的部署策略。文献[10]综合分析当前“低慢小”目标的主要特点,提出反“低慢小”目标光电技术的发展思路,包括光电探测技术、光电干扰技术、光电硬毁伤(激光毁伤)技术等。文献[11]阐述了“低慢小”目标特性,为提升雷达探测识别能力,提出采用“宽带多普勒处理”方式可有效提升改善因子,而基于窄带时、频域相结合的目标分类识别方法有望解决目标分类识别问题。但迄今为止,对“低慢小”目标在超近空空域仍存在难以探测发现、识别难度大、时效性低等难题。
传统的防护体系已经初步实现了对近空空域的“低慢小”目标的探测处置能力,系统集成了针对“低慢小”目标特性的雷达、光电、无线电和指控设备,通过协同引导和信息融合技术完成对“低慢小”目标的探测、跟踪、识别、决策和处置,保障防护区域的近空安全。然而,防护区域周界外围超近空空域(距离150 m以内、高度50 m以下)环境更为复杂,建筑物、树木遮挡情况严重,电磁环境复杂;而且探测到的“低慢小”目标距离防护区域周界比较近且飞行速度比较快,对防护系统的响应能力提出更高要求。因此,超近空空域是目前传统防护体系的薄弱区域,亟需加强应对“低慢小”目标在超近空突然起降、快速穿越的探测处置能力。
2 传统无人机防护系统
通常,无人机防护系统主要由指挥控制分系统、探测分系统以及干扰处置分系统组成。
指挥控制分系统可以实现探测分系统、干扰处置分系统各型设备的接入,完成各分系统设备数据信息的融合处理,形成综合航迹、完成空情态势三维立体显示、针对目标生成处置方案、完成任务分配、协同联动和效果评估;可实时监视分系统各设备工作状态,对异常情况给予告警。
探测分系统主要包括雷达探测、光电探测和无线电侦测三种技术手段,其在探测“低慢小”目标时各有优势,组合使用时能够扬长避短构建一套完整的侦测体系,但在探测超近空的“低慢小”目标时仍然存在不足,具体技术手段特点如下:
2.1 雷达探测
探测距离远,搜索效率高,测距精度高,受雾、云、风和雨等天气条件影响较小,具有全天候、全天时的特点。但超近低空的“低慢小”目标飞行高度低,背景复杂,目标回波信号容易被强地物杂波和强噪声所淹没,导致目标的信杂比或信噪比低;同时,“低慢小”目标在超近空通常采取低速运动或者悬停的运动方式,导致基于“多普勒效应”的雷达很难探测到目标,影响雷达的探测效果。
2.2 光电探测
一般包括可见光探测和红外探测,通过对目标无人机的图像信息进行检测,直观、易于辨识目标,其为被动探测,具有较好的隐蔽性,同时在强电磁干扰等环境下仍能有效探测。无人机防护设备通常采取制高点架设的部署方式,但受防护区域地形以及设备部署位置的影响,防护区域超近低空一般环境复杂,建筑物林立、树木密集,无法第一时间搜索跟踪到目标,探测目标存在延迟。
2.3 无线电侦测
利用无人机与遥控器之间通信时的无线电信号进行侦测、识别和定位,可识别出一些无人机的型号,其优势在于不受无人机尺寸、材质等限制。但由于是被动接收无人机发射信号,对于自主飞行模式下或处于无线电“静默”状态下的无人机无法探测;此外,防护区域地势起伏,建筑物遮挡多,移动基站密度大,对无线电信号造成严重的衰减和干扰。
干扰处置分系统一般采用无线电干扰技术手段,通过对无人机的遥控信号工作频段上发射大功率的干扰信号,提升无人机上接收设备接收的噪声电平,使遥控器和无人机不能正常通信,迫使入侵无人机迫降或自动返航。
目前,传统的防护系统采用雷达、光电、无线电三者协同探测,将各自探测手段的特点进行互补,但由于传统的探测处置设备架设高度较高,且周围环境复杂,地势起伏,树木、建筑物遮挡严重,因此无法覆盖设备部署下方以及防护区域周界外围的超近低空空域,探测处置区域存在“灯下黑”的盲区,传统手段探测处置盲区示意如图1所示。
本文提出一种基于新型全景光电探测技术的超近空补强设计方案,采用低照度、大视场可见光传感器,利用多传感器拼接技术,实现单节点大空域范围的覆盖与显示,利用类人视觉机制的智能算法,实现复杂场景内目标的快速检测与准确识别。通过多节点分布式组网部署方式,实现对现有防护系统超近空防护能力的补强。
3 新型超近空防护系统设计
3.1 系统总体设计
新型超近空防护系统主要由指挥控制分系统、全景光电探测分系统以及智能无线电干扰分系统组成,如图2所示。指挥控制分系统通过开放架构将分布式系统进行综合集成,完成点位间信息互联、态势融合和协同调度,是分布式系统实现高效工作能力的核心。全景探测分系统采用全景光电探测设备对防护空域进行全天候、全天时探测、预警,当发现可疑目标后,通过小目标检测算法及深度学习算法处理后确认目标信息,上报至指挥控制分系统进行目标评估、显示。智能无线电干扰分系统采用全向干扰设备,对“低慢小”目标进行链路干扰,消除突防威胁。
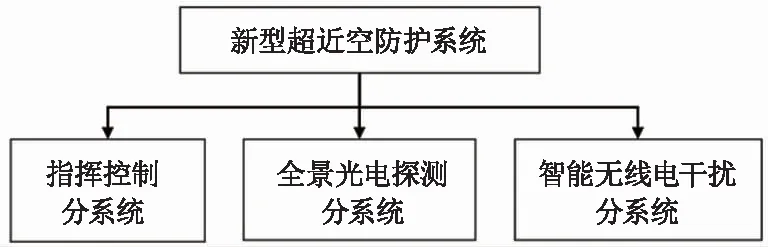
图2 新型超近空防护系统组成图
新型超近空防护系统具备多探测节点协同工作和对超近空、超低空的全天时探测能力,可有效解决防护区域超近空、超低空建筑物密布、树木林立、基站密度高等不利因素导致的遮挡严重、探测盲区过大等问题,有效地弥补现有常规防护系统的探测盲区。
3.2 指挥控制分系统
指挥控制分系统主要对光电、无线电等防控设备进行管理、控制,在侦察探测信息融合、目标识别等基础上,控制无线电干扰分系统处置“低慢小”目标。
指挥控制分系统主要以功能软件为核心,部署和运行于通用计算机平台。指挥控制分系统组成如图3所示,分系统软件包括三维态势显示、数据融合、目标识别、辅助决策、指挥控制、视频服务等模块,用于完成探测识别处置“低慢小”目标所需的各项功能。分系统硬件平台包括通用计算机、服务器、磁盘阵列、交换机等,用于满足计算处理、数据通信等需求。
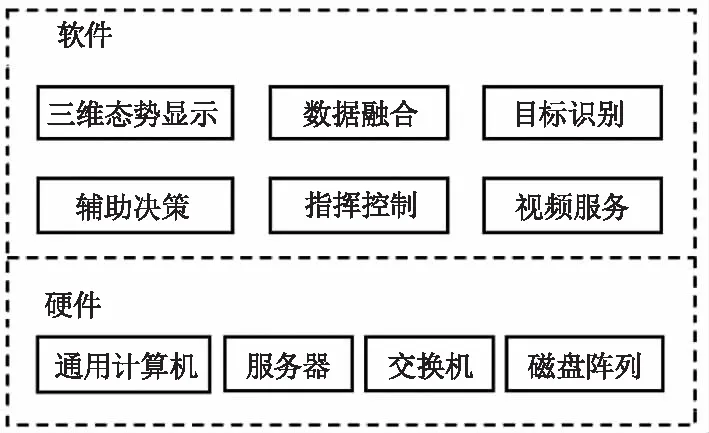
图3 指挥控制分系统组成图
全景光电探测分系统将探测、识别到的“低慢小”目标信息上报到指挥控制分系统,在指挥控制分系统的三维地图上显示告警位置信息、机型信息等,可实时查看告警点位视频图像;通过智能辅助决策算法评估后控制智能无线电干扰分系统,控制开启告警点位附近的无人机干扰设备,完成各系统间信息交互、指挥控制。
3.3 全景光电探测分系统
全景光电探测分系统主要由NVR业务服务器、显控平台和多台全景光电探测设备组成,其组成如图4所示。
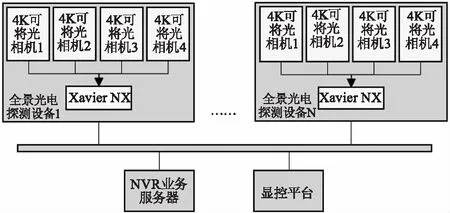
图4 全景光电探测分系统组成图
全景光电探测分系统的技术特点如下:
(1)单节点全景光电探测设备采用单传感器4 K高清、复数组网、凝视型25 Hz高帧频的应用的技术方式。为实现大数据量的同步处理及传输,采用高性能GPU前端预处理和后端分析的信号处理架构,构建前端节点自探测处理,后端中心二次筛选提取的高效系统数据处理层级架构,实现多节点探测信息的批量处理及统一上报;
(2)NVR业务服务器与板卡和显控平台通信,实现信令的转发,报警事件等日志的存储;
(3)NVR业务服务器实现所有实时视频的接入、转发、录像及点播;
(4)显控平台可实时显示各点位光电全景探测设备的图像信息和告警信息,同时具备报警事件的管理和回放功能,以及对各全景光电探测设备的远程管理等功能。
全景光电探测分系统工作流程如图5所示,首先获取前端相机的数据码流,调用板卡底层解码库,实现视频帧的获取,然后对单路视频图像进行去暗角、畸变矫正等图像处理,利用拼接融合算法完成多路图像拼接处理;在拼接后的全景图像上进行小目标检测,然后利用深度学习算法对疑似目标进行虚警二次过滤,当确认为真目标,上传告警信息至NVR业务服务器,完成目标告警相关视频的存储、截图,并将告警信息上报至指挥控制分系统,在显控平台实时显示图像以及告警信息。

图5 全景光电探测分系统工作流程图
全景光电探测设备采用4颗4 K可见光相机组合的方式,高灵敏、低照度可见光凝视探测技术路线,通过大像元、大视场、低照度可见光传感器以及全景图像拼接应用的方案设计,实现水平方向180°大视场监视,对弱小动目标的高帧频探测以及防控区域的大空域覆盖。通过显控平台实时显示全景光电探测设备拼接后的全景图像及目标告警信息,并实现全景设备的状态管理、设备列表管理、报警管理、报警配置、报警快照、报警回放以及部分业务功能等,传统光电搜索跟踪设备与新型全景光电探测设备显控对比如图6所示。在超近低空空域相较于传统的光电搜索跟踪设备,新型全景光电探测设备具有以下优势:(1)大视场监视;(2)不需要机械转动搜索,处理速度快、效率高;(3)成本低廉、体积轻巧,在复杂环境下可通过分布式部署方式解决遮挡问题。

图6 传统光电搜索跟踪设备显控(上)与新型全景光电探测设备显控(下)对比图
针对复杂背景环境下的运动弱小目标的检测,通过基于类人脑视觉机制运动目标检测与智能识别技术,对运动“低慢小”目标以及复杂动态背景环境开展针对性的建模,提高在复杂背景下弱小运动目标的快速检测能力,通过相邻帧之间的运动关联比对,实现虚假运动目标的剔除。采用深度学习算法,实现对空中无人机、鸟、树叶以及其他类似目标的深度分类识别。最终达到了针对“低慢小”目标的快速发现与准确识别的效果,类人脑视觉机制运动目标检测与传统目标检测相比具有以下优势:(1)类人脑视觉机制对运动目标感知能力突出;(2)类人脑视觉机制针可实现弱小目标在动态复杂背景环境下的精准识别。
3.4 智能无线电干扰分系统
智能无线电干扰分系统由多台无人机干扰设备组成,按照防护需求与全景光电探测设备一起分布式部署在防护区域。
无人机干扰设备主要由干扰主机和天线构成,干扰主机内置干扰信号源和射频功率放大器等。通过指挥控制分系统控制设备开启工作,根据预置的信号波形对无人机进行宽频干扰,可实现对900 M、1.5 G、2.4 G、5.8 G频率的覆盖,工作原理如图7所示。在通视环境下,可实现约2 km的干扰距离,防御范围水平为360°,垂直为60°。采用分布式部署方式,在防护区域形成一张无形的无线电防护网,实现对入侵目标的现场干扰处置。

图7 无人机干扰设备工作原理图
4 应用情况
根据某工程项目需求,在某区域复杂环境下(树木、建筑物遮挡、电磁环境复杂等),对某防护区域内现有防护体系进行补强建设,主要解决防护区域周界超近空(距离150 m以内、高度50 m以下)的防护需求,重点解决“低慢小”目标在防护区域周界快速起降与突防的问题。通过对现场实际勘查,防护区域周界存在大量建筑物及树木遮挡,整体环境比较复杂,现有的防护系统超近空防护能力还需要加强。
为解决上述问题,将分布式超近空防护系统部署于该防护区域,其系统构成如图8所示。前端设备(新型全景光电探测设备、无人机干扰设备)通过网线与指挥控制中心的服务器、计算机相连,在后端计算机平台上显控平台实时查看、记录全景光电探测设备图像数据,通过指挥控制系统控制无人机干扰设备工作。

图8 新型超近空防护系统构成示意图
设备沿防护区域东、南、西侧围墙分布式部署,根据现场情况,按需选取180°全景光电探测设备和无人机干扰设备的点位,设备均采用支架式架设在防护区域周界围墙上,点位部署示意如图9所示。

图9 点位部署示意图
目前已完成设备的安装和系统调试,开展了以大疆精灵4、Parrot ANAFI、大疆FPV等无人机为靶机的测试试验,测试采取了超近空突入以及近景起飞突入的飞行模式,系统在150 m处开始告警以及近景进入视场立即告警,并在防护区域周界围墙外对小型人机完成干扰处置,小型无人机受到无线电干扰后迫降或自动返航,通过多节点分布式组网探测、干扰技术的应用,基本实现了该防护区域周围外围的全域覆盖,弥补了建设前针对超近低空复杂背景环境下的探测处置盲区,有效提升了系统在超近空域的探测和处置能力,加强了防护区域的安全。
5 结 论
随着无人机技术的不断发展,在偷拍偷视、情报窃取,实施爆炸、恐怖袭击等方面带来巨大的威胁,给国民安全带来了更严峻的挑战。本文提出一种基于新型全景光电的超近空防护系统设计方案,重点解决传统目标探测手段在超近空、超低空的探测不足,将各自探测手段的优劣势进行互补,为解决超近空下“低慢小”目标的威胁提供了高效、灵活、低成本的解决方案,是对超近空反无人机系统领域的重要探索。填补了无人机探测针对超近低空空域的能力盲区,丰富和完善了无人机探测技术以及产品体系。
