基于改进时域高通滤波红外图像的海上风机塔架腐蚀速率预测
2023-11-17黄祥声乐治济吴敏辉倪秀楠钟茗秋
黄祥声,乐治济,吴敏辉,倪秀楠,钟茗秋,陈 川
(1.上海勘测设计研究院有限公司,上海 200000;2.三峡新能源海上风电运维江苏有限公司,江苏 盐城 224000;3.福建省新能海上风电研发中心有限公司,福建 福州 350000;4.中国电器科学研究院股份有限公司,广东 广州 510663)
1 引 言
和陆地风电场对比可知,海上风电场的风能资源储量较多,开发效率也较为显著,且对环境的污染不多。全球第一座海上风电场是构建于丹麦,自那以后,海上风力发电变成全球可再生能源发展的核心技术。但是海上风电场的运行环境较为复杂,温度、湿度、盐雾程度、日照时间都和陆地环境存在明显不同,导致海上风电设备会出现腐蚀问题[1]。
塔架就是塔筒,长期暴露在海洋大气环境里,海洋湿度相对陆地而言较高,塔架在此环境下便会出现铁锈[2]。海洋大气中的铜离子具备穿透能力,在湿度较高的环境会导致塔架腐蚀速度加快。在此研究背景下,塔架腐蚀速率预测便十分重要,有效预测海上风机塔架腐蚀速率,可提前掌握海上风机塔架腐蚀程度,以便进行检修或更换。目前结合已有文献可知,针对海上风机塔架腐蚀速率预测方面研究不多,但针对各种材料结构腐蚀速率的预测方法不少,如文献[3]曲志豪等人使用优化随机森林方法,可有效预测H2S 环境下油气田管道腐蚀产物种类和腐蚀速率。文献[4]靳文博等人使用极限学习机预测海洋环境中3C钢腐蚀速度,预测结果有效。结合前人研究结果可知,目前关于材料腐蚀速率预测问题,可引入智能化算法,无需人工检查,且海上风机塔架所处环境恶劣,人工检查难度极大[5],为此,本文提出了基于改进时域高通滤波红外图像的海上风机塔架腐蚀速率预测方法,该方法不仅引入智能化算法预测腐蚀速率,且在预测之前,对海上风机塔架红外图像使用改进时域高通滤波算法,有效去除海上风机塔架红外图像的噪声信息,优化图像整体质量,这对海上风机塔架腐蚀速率的准确预测存在较大帮助。
2 海上风机塔架腐蚀速率预测方法
2.1 基于改进时域高通滤波算法的塔架红外图像质量优化方法
时域高通滤波属于不均匀性矫正算法,塔架红外图像的时域频率属性显示,图像中塔架目标信息具有高频特征,背景杂波、噪声信息具有低频特征,所以可使用时域高通滤波算法实现图像高频、低频特征矫正,以此去除塔架红外图像不同频度信息的不均匀矫正。
针对第m帧塔架红外图像X(m)而言,不均匀校正方法是:
(1)
(2)
式中,F、g(m)依次是偏移系数、低通滤波器输出;N是提前设置的时间常数。
考虑到式(1)仅对偏移系数执行矫正处理,导致滤波后红外图像细节较为模糊,为此,本文使用对该算法进行改进,改进后的算法示意图如图1所示。

图1 改进时域高通滤波算法
改进的时域高通滤波算法的核心是结合图像中塔架信息自适应设置时间常数,如果塔架较大,时间常数便较小,反之塔架较小,时间常数便较大。
时域高通滤波算法仅对偏移系数执行矫正处理[6-7],以优化矫正效果为前提,本文使用减底图方法将X(m)执行预处理,底图代表探测器在均匀辐射源的条件中探测塔架时噪声图像。一般情况下X(m)中噪声存在缓慢起伏的变化特征,噪声空间频率大部分都聚集在低频区域。使用难度较小的减法计算便可删除固定模式的噪声信息,此操作下,增益并不会出现不均匀变化。减底图方法能够降低算法运算难度,提高运算效率。则减底图后的塔架红外图像是:
(3)
式中,Xback(m)是常温状态中塔架红外图像的噪声底图。

(4)
2.2 基于改进Niblack算法与最大熵算法的塔架红外图像分割方法
将2.1小节处理后的Yhb(i,j)执行分割处理,以此提取塔架目标图像。Niblack算法为常用的图像局部阈值分割算法,根据相关资料记载,此算法对图像的分割效果受限于修正系数与邻域窗口。修正系数与邻域窗口数值设置的合理性直接影响分割效果,为此,文章对此算法进行改进,结合图像自身像素矩阵设置邻域窗口数值,改进后邻域窗口v是:
(5)
(6)
式中,v1、v2是改进后邻域窗口的行数与列数;L、C依次是图像Yhb(i,j)像素的行数与列数;round表示取整函数。此时塔架红外图像Yhb(i,j)局部灰度均值n(i,j)与标准差r(i,j)是:
(7)
(8)
式中,i、j是Yhb(i,j)的像素点;g(i,j)是Yhb(a,b)的灰度值。
修正系数h是:
(9)
式中,gmax、gmin是邻域窗口中像素最大灰度值与最小灰度值。
改进后邻域窗口与修正系数会结合Yhb(i,j)的像素矩阵与灰度值信息执行自适应调节。
若以像素点(i,j)为中心的局部邻域熵是Kij:
(10)
式中,qij是像素点(i,j)的灰度分布概率。
(11)
使用隶属度函数把Kij变成0~1之间背景因子,将Yhb(i,j)背景执行分类处理,背景因子较大,代表Yhb(i,j)背景简单性越显著,背景因子较小,Yhb(i,j)背景复杂性越显著[8]。
(12)
式中,Kmax、Kmin依次是邻域中最大熵与最小熵的数值。
则文章使用背景因子分割图像,如果G大于背景因子,那么图像背景不复杂[9-11],通过最大熵法便可分割Yhb(i,j),若G小于或者等于背景因子,便需要使用改进Niblack算法分割Yhb(i,j)。
最大熵法属于常用全局阈值分割方法,可通过图像背景与目标最大熵的和值,运算图像分割阈值[12]。设置Yhb(i,j)的尺寸是N×M,灰度区间是o,灰度级o出现的概率是q(o)。使用阈值把Yhb(i,j)分成背景φ、目标φ两部分,Yhb(i,j)的分割结果是:
(13)
式中,KG(K)是背景φ、目标φ两部分的熵和值;K、Z依次是阈值、灰度级最大值。
2.3 基于天牛须搜索算法的极限学习机腐蚀速率预测方法
将2.2小节获取的海上风机塔架目标φ图像作为基于天牛须搜索算法的极限学习机腐蚀速率预测方法的预测样本,预测腐蚀速率的等级信息,实现腐蚀速率预测。
基于天牛须搜索算法的极限学习机腐蚀速率预测方法中,因为极限学习机输入节点的数目对其结构的简易程度存在直接影响,输入权重与隐含层阈值的设计具有随机性,将导致此结构性能稳定性较差,对塔架腐蚀速率预测准确率不能保证,所以,文章将天牛须搜索算法和极限学习相融,主要通过天牛须搜索算法优化极限学习机的输入权重与隐层阈值,以此设置最优网络结构,在保证网络结构最优的前提下,准确预测塔架腐蚀速率。
天牛须搜索算法是模拟天牛捕食行为而设计的智能化算法,天牛通过2个触角感知气味浓度,从而决定自己需要前进的方向,以循环“气味感知-前进-停留”这一过程,便能实现食物定位。此算法无需掌握函数的详细模式和梯度数据,便能够自主完成寻优,且个体数量是1,计算量较少,寻优速度较快。将天牛个体设成极限学习机输入权重与隐层阈值的可行解,此算法的操作流程是:
(1)参数初始化,设置用于预测塔架腐蚀速率的极限学习机参数寻优的空间维数与迭代次数最大值依次是V、H,塔架腐蚀速率预测过程中,天牛寻优极限学习机参数的步长因子依次和天牛初始质心位置依次是β0、y0;触角的间距是e,β0与e之比是d;

(3)设定天牛须方向的随机变量是b,将其执行归一化操作[13]:
(14)
(4)确定天牛须的空间位置信息:
(15)
其中,y1h、ysh依次是第h次迭代过程中两侧触角的位置;yh是第h次迭代过程中天牛的质心位置;
(5)更新用于预测塔架腐蚀速率的极限学习输入权重与隐层阈值可行解的天牛坐标:
yh+1=yh-βhsign(f(ysh)-f(y1h))b
(16)
其中,第h次迭代的步长因子是βh;f(ysh)、f(y1h)依次是两侧触角感知的气味浓度;sign( )是符号函数;
(7)如果迭代次数为最大值,结束用于预测塔架腐蚀速率的极限学习输入权重与隐层阈值寻优,输出寻优结果,反之跳转第(3)步骤。
极限学习机是神经网络算法的其中一种,此算法需要调整的参数不多,仅仅需要合理设定隐含层神经元数目,所以此算法的学习效率高,泛化能力显著[14]。
把2.2小节分割后的海上风机塔架目标红外图像中的目标图像输入极限学习机,输入层代表塔架特征的神经元数目设成n,隐含层如果存在Q个神经元,那么输出层便会输出P个代表腐蚀速率预测结果的神经元。第h个海上风机塔架目标红外图像训练样本输入极限学习机后,输出结果是:
(17)

将式(16)转换矩阵模式:
(18)

综上所述,基于天牛须搜索算法的极限学习机腐蚀速率预测方法的操作步骤是:
(1)设置天牛须搜索算法的初始参数,把海上风机塔架腐蚀速率预测结果和实际值的误差设成适应度函数;
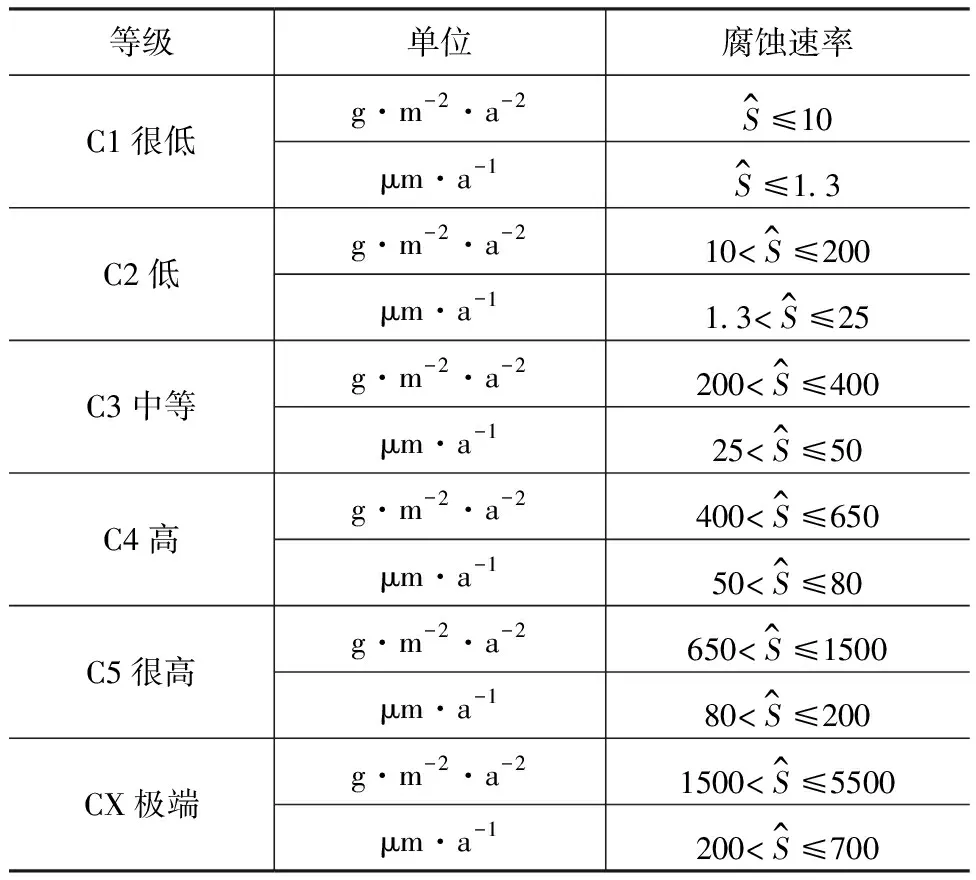
表1 海上风机塔架腐蚀速率级别信息
3 实验分析
为测试本文方法的应用效果,在MATLAB软件中对本文方法的应用性能进行针对性测试。首先使用本文方法对海上风机塔架红外图像进行滤波,滤波前后海上风机塔架红外图像的视觉效果图如图2所示。
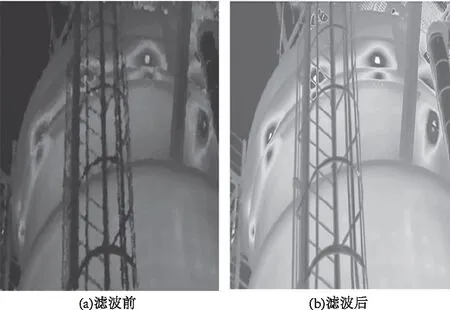
图2 滤波前后海上风机塔架红外图像的视觉效果
如图2所示,本文方法对海上风机塔架红外图像滤波前,海上风机塔架红外图像细节模糊,图像质量较差,本文方法对海上风机塔架红外图像滤波后,图像质量明显优化,图像中目标信息特征更为清晰,由此证明本文方法使用改进时域高通滤波算法对海上风机塔架红外图像进行滤波处理后,可有效提升图像质量。
图3是本文方法对海上风机塔架红外图像滤波后的分割效果图。
分析图3可知,本文方法对海上风机塔架红外图像滤波后的分割效果较好,图像背景和目标均被有效分离,以此在预测海上风机塔架腐蚀速率时,可提高预测效率。
本文方法对滤波后海上风机塔架红外图像进行分割完毕,对其腐蚀速率进行预测,预测结果直接显示在图像腐蚀部位,结果如图4所示。

图4 海上风机塔架腐蚀速率预测
由图4可知,本文方法对该海上风机塔架腐蚀速率预测后,认为此塔架的腐蚀速率等级主要是C1与C3,腐蚀速率等级不高。
为进一步测试本文方法的预测精度,测试本文方法对海上风机塔架腐蚀速率预测结果和实际结果的吻合度,如图5所示。
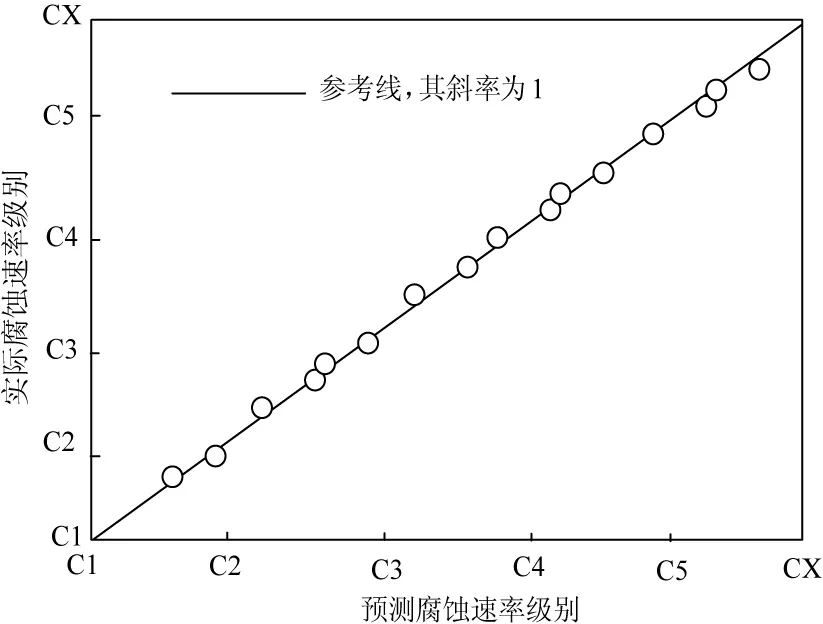
图5 腐蚀速率预测精度
图5中,本文方法预测的腐蚀速率级别每点都处于斜率为1的参考线周围,表示预测结果和实际结果存在高度吻合性。
测试本文方法的预测效率,预测效率主要体现于本文方法在预测海上风机塔架腐蚀速率时的收敛次数,如图6所示。
由图6可知,本文方法迭代次数是10次时,对海上风机塔架腐蚀速率的预测结果均方误差为最小值0.01,此时便可高精度预测海上风机塔架腐蚀速率,说明本文方法仅在10次迭代时便具备较高的海上风机塔架腐蚀速率预测精度,预测速度较快,应用效率显著。
4 结 论
海上风机塔架腐蚀速率预测对海上风机塔架安全保护工作而言存在研究价值,准确快速预测海上风机塔架腐蚀速率,是目前海上风机塔架腐蚀速率预测工作的发展目标,为此,文章提出了基于改进时域高通滤波红外图像的海上风机塔架腐蚀速率预测方法,此方法能够利用海上风机塔架红外图像完成海上风机塔架腐蚀速率预测,实验中,该方法得出以下几点结论:
(1)本文方法对海上风机塔架红外图像滤波后,图像质量明显优化,图像中目标信息特征更为清晰;
(2)本文方法对海上风机塔架红外图像滤波后的分割效果较好,图像背景和目标均被有效分离;
(3)本文方法表示对海上风机塔架腐蚀速率预测结果和实际结果存在高度吻合性;
(4)本文方法迭代次数是10次时,对海上风机塔架腐蚀速率的预测结果均方误差为最小值0.01,此时便可高精度预测海上风机塔架腐蚀速率,说明本文方法能够快速收敛,实现海上风机塔架腐蚀速率高精度预测。
