基于无坐力炮复合身管上瞄准镜座的系统可靠性研究
2023-11-13孙向东戴泓源胡永军
孙向东,戴泓源,梁 勇,胡永军,王 佳,赵 强
(河北燕兴机械有限公司, 河北 张家口 075000)
0 引言
无坐力炮配装瞄准镜能够实现瞄准与射击的快速性和准确性,同时提高对恶劣战场环境的适应性,进而发挥武器系统对目标的毁伤能力,而无坐力炮与瞄准镜的连接座是保证系统效能实现的重要保障。传统无坐力炮身管采用钢结构,其与瞄准镜座(以下简称“镜座”)采用机械连接[1-4],而后将瞄准镜固定于镜座上,稳定性好,可靠性高。然而,在金属内衬外缠碳纤维的复合身管上,与瞄准镜连接的镜座是先粘接再通过玻璃纤维缠绕绑缚固定的。在无坐力炮射击时,瞄准镜对镜座产生复杂的作用力,可能导致绑丝松脱、崩丝,镜座出现松动,而重复安装瞄准镜和循环射击会导致镜座与瞄准镜的接触面出现磨损,接触间隙增大,这些原因均会影响瞄准精度;镜座与复合身管连接处在受瞄准镜的拉扯作用下,可能会造成膛线尺寸变化,使得弹丸在膛内的运动形式变化,出现弹丸与内膛某处的摩擦力变化,加速内膛磨损,影响复合身管寿命。因此,需要对采用复合身管的镜座工作可靠性进行试验,以验证其在寿命周期内能否实现复合身管与瞄准镜的可靠连接,以便指导该类型武器的研制和使用。
本文中通过在复合身管镜座处粘贴应变片、在瞄准镜上安装三轴加速度传感器,完成射击试验的数据采集。利用测得的变形率来判别镜座处身管的变形情况和对炮膛尺寸的影响;通过测得的振动加速度,确定复合身管配装瞄准镜的冲击试验参数;以无坐力炮使用寿命作为冲击试验基数进行冲击试验,对镜座的结构、强度、及其与无坐力炮复合身管的绑缚连接、复合身管内膛尺寸以及无坐力炮系统瞄准的可靠性进行评估,为镜座的优化提供数据支撑。相关研究可为其他类似火炮上镜座的可靠性验证提供参考依据。
1 射击试验数据采集与分析
1.1 试验目的
镜座绑缚于复合身管上的局部图如图1所示。无坐力炮射击时,瞄准镜会随身管运动状态的变化对镜座产生反作用力,同时将该作用力传递至镜座绑缚部位,在应力作用下可能造成绑缚镜座的玻璃纤维松脱、崩丝以及身管内膛尺寸超差,绑缚松脱、崩丝造成镜座晃动影响瞄准,内膛尺寸偏差造成弹丸膛内运动姿态变化,影响射击精度与身管寿命。因此,需要对镜座绑缚处进行应变测试,用以分析身管的局部变形;并对瞄准镜的加速度测试,为可靠性试验提供基础数据。
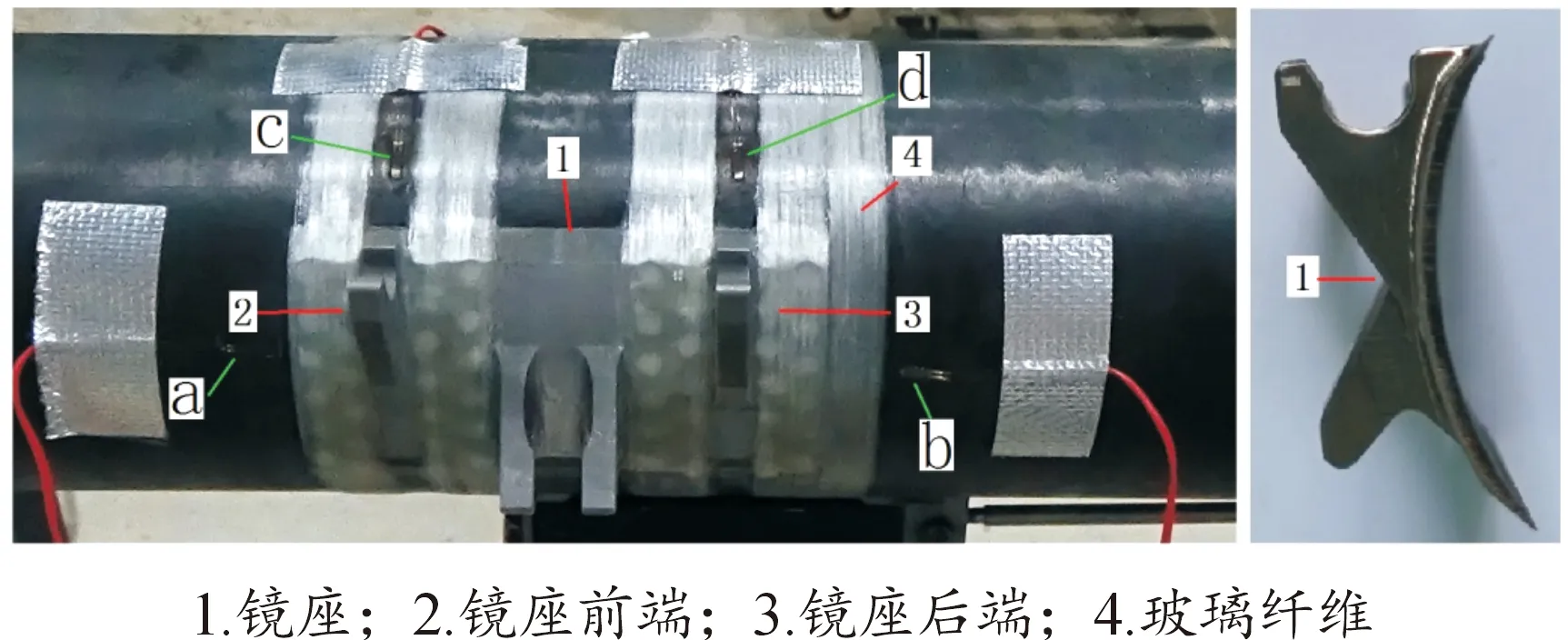
图1 镜座与身管绑缚连接示意图
1.2 试验方案
使用配装瞄准镜的无坐力复合身管炮进行射击试验,实时采集镜座绑缚处的身管应变和瞄准镜的加速度。如图1所示,应变片布置于身管轴线方向镜座的前端测试点a、后端测试点b和身管环向镜座的前端测试点c、后端测试点d;将三轴加速度传感器安装于瞄准镜上,从炮口向炮尾看,传感器的X方向与炮膛轴线平行,Y、Z方向分别与X方向垂直,传感器3个方向的具体指向如图2所示。

图2 传感器布置示意图
本文中选用日本共和KFGS-5-120-C1-11L1M2R系列应变片,灵敏度系数为2.11;选用JF110压电式加速度传感器,其为三方向振动、冲击型传感器,X方向灵敏度为12.8 pC/g,Y方向灵敏度为11.6 pC/g,Z方向灵敏度为12.7 pC/g,频率范围为1~5 000 Hz(±10%),谐振频率为30 kHz,量程2 000g,该传感器具有频率响应范围宽、灵敏度高、动态特性好、横向灵敏度低、抗干扰能力强等特点,在振动、冲击等动态测试场合使用较广。
1.3 测试结果与数据分析
射击过程中,镜座绑缚处身管应变变化曲线见图3。分析表明:在镜座绑缚处的轴向测试点a和b的最大变形率分别为0.082%和0.064%,环向测试点c和d的最大变形率分别为0.061%和0.08%,均处于弹性变形范围内,除受缠绕过程中基体均匀化程度、碳纤维铺层等因素影响导致碳纤维复合材料的线性膨胀不一致外,应变测试结果比较稳定。射击时,瞄准镜对无坐力炮连接机构绑缚处的身管变形影响较小。

图3 镜座绑缚处身管变形结果
射击过程中,瞄准镜运动加速度变化曲线如图4所示。
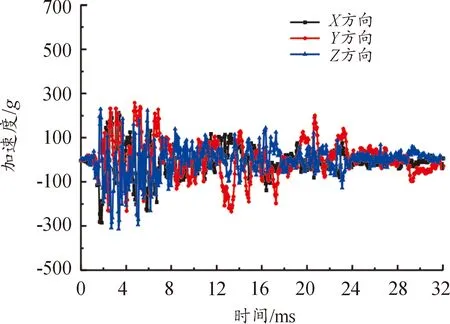
图4 瞄准镜振动加速度试验结果
分析表明:在瞄准镜X方向、Y方向、Z方向的振动加速度峰值分别为213g、258g、230g,相对系统整体而言稳定。Y、Z方向的加速度峰值超过X方向的加速度峰值。造成Y方向加速度偏大的原因有:① 镜座与瞄准镜连接的贴合面在Y方向贴合不紧密,使得射击瞬间瞄准镜沿间隙距离的运动惯性增大;② 使用卡箍将无坐力炮固定于发射架体后,射击瞬间无坐力炮出现旋转,使其在卡箍与无坐力炮的Y方向未贴合间隙处的窜动量加剧。
2 可靠性试验
2.1 试验目的
产品的可靠性是指产品在规定条件下和规定的时间内,完成规定功能的能力[5],而无坐力炮上镜座在寿命期内实现与瞄准镜的正常连接,是完成准确瞄准、射击的重要条件。结合无坐力炮上镜座的使用及环境条件确定试验应力,主要包括振动应力、温度应力和湿度应力[6],在本文中主要考虑射击过程中冲击对无坐力炮上镜座工作可靠性的影响,对无坐力炮上镜座的可靠性、与镜座连接处的身管内膛尺寸稳定性以及系统零位走动量进行验证。
2.2 冲击试验模拟方案和方法
2.2.1冲击试验台
使用全自动液压冲击试验台模拟射击过程中的冲击。全自动液压冲击试验台由冲击试验台台体、液压源和电气测量控制系统组成。试验台体主要包括工作台面、导向柱、底座、波形发生器、提升油缸、行程开关和减震气囊等组成,试验台台体结构如图5所示。本文中选用SY10-25型全自动液压冲击试验台,该试验台不仅可实现台面高度的精准可控、刹闸系统可靠、噪音低、无杂波形成的技术特点,还可根据客户需求选择不同标准下的波形容差带,通过更换波形发生器来实现不同波形的调整,从而满足用户的试验需求。

图5 试验台台体结构图
2.2.2试验原理
试验时,液压系统向提升油缸供油,将台面及被试品提升到所需高度后,制动油路通油,瞬间将台面锁住,然后液压系统换向,提升油缸活塞杆下降,当提升油缸活塞杆下降到最低点时,液压系统停止供油,锁紧油路释放,台面自由跌落,与安装在底座上的波形发生器碰撞,产生一个冲击波形,安装在台面或被测物体上的传感器将冲击产生的波形信号采集并传至分析软件。台面下落与波形发生器接触并反弹,此时,制动装置会瞬间启动将工作台面锁住,避免二次冲击。
冲击试验使用的无坐力炮复合身管长度为380 mm,其膛内结构、镜座安装方式与实炮一致。冲击试验使用与1.2节中相同的压电式加速度传感器,通过螺杆将传感器固定于瞄准镜上。如图6所示,使用工装1将安装瞄准镜与加速度传感器的复合身管固定于冲击试验台的工作台面上。通过调换波形发生器和冲击高度对峰值加速度幅值与波形进行控制,当峰值加速度满足要求后,按该模式进行跌落冲击模拟试验。
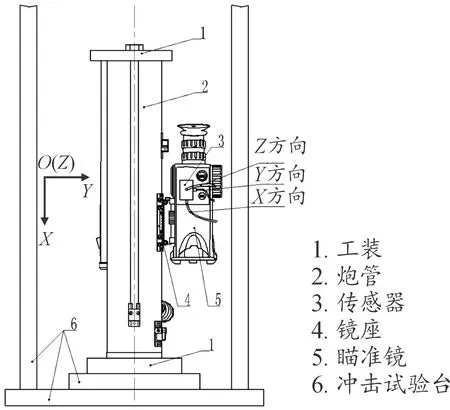
图6 被试品安装结构示意图
2.2.3试验参数
使用无坐力复合身管炮射击过程中,主要承受X向动力载荷,使无坐力炮会沿炮膛轴线方向产生前冲或后坐。因此,本文中将该方向的受力作为主试验力进行冲击试验。
按第1.3节中X方向实测应力的优先原则[6]选取冲击加速度为225g,标准脉冲宽度为2 ms,冲击次数按使用寿命的2~3倍(1 500次)选取,试验参数选取如表1所示。
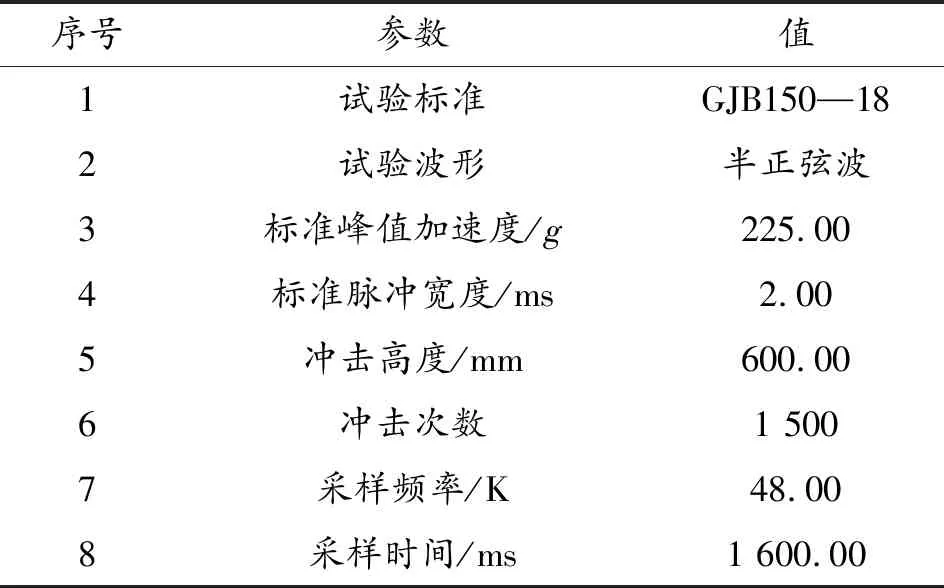
表1 可靠性试验参数
2.2.4试验方法
试验选用A、B两台瞄准镜,其中A瞄准镜主要用于冲击试验,用以对冲击后的系统零位走动量进行评判,B瞄准镜主要用作A瞄准镜的参照标准,用以判别A瞄准镜在冲击后的数据有效性。
使用冲击试验台对配装瞄准镜的无坐力炮复合身管进行冲击试验,试验方法如下:① 冲击试验前,对镜座及其所在位置的内膛尺寸进行测量;② 对A瞄准镜进行电子分划、降级分划零位校正,对B瞄准镜进行电子分划零位校正,记录A、B瞄准镜初始分划的读数,试验中不再进行分划调整;③ 将配装A瞄准镜的复合身管安装至冲击试验台台面,再将加速度传感器安装于A瞄准镜上,进行系统调试,而后对配装A瞄准镜的复合身管进行冲击试验,保存冲击加速度数据,B瞄准镜作为对照标准不参与冲击试验。每天的试验完成后,读取A瞄准镜的电子、降级分划的零位走动量,将A瞄准镜取下,再把B瞄准镜装配至复合身管上,读取电子分划零位走动量;④ 每天试验完成后,对镜座所在位置的膛线进行测量。
2.3 测试结果与数据分析
2.3.1冲击对复合身管镜座的影响
如图7所示的冲击试验数据与实炮射击的振动加速度对比曲线。
图7 冲击试验与实炮射击的加速度曲线
由图7可见,瞄准镜在X方向的加速度峰值为227g,与射击试验由前冲、后坐产生的振动加速度相比,其值偏大14g,与冲击试验方案设定加速度值吻合,满足试验要求;Y和Z方向受力较小,振动峰值分别为99g和114g。Y和Z方向的振动峰值偏低的主要原因是:冲击试验不能实现无坐力炮复合身管在竖直向下运动的同时进行旋转,而无坐力炮是线膛结构,发射瞬间,受火药爆燃的能量作用,弹丸向炮口方向运动,在对弹丸和无坐力炮的综合受力分析后可知,无坐力炮会发生向前或向后运动,同时,弹丸在炮膛内旋转并反作用于无坐力炮,无坐力炮相对弹丸做反向旋转,因此,在射击过程中,瞄准镜会发生与无坐力炮一致的随动,必然导致Y和Z方向的振动峰值增加。
1 500次冲击试验结束后,检查镜座与无坐力炮复合身管的绑缚连接正常,未出现玻璃纤维绑丝松脱、崩丝现象,利用三坐标对镜座前、后端的圆弧尺寸进行测量,并与试验前测量的尺寸进行比较,发现位于镜座前端的圆弧表面出现轻微磨损,尺寸增大约0.004 mm,说明该点是冲击试验的主受力点。镜座的其他外形、尺寸正常,使用功能正常,说明采用该种镜座结构可实现与复合身管的可靠连接。
2.3.2冲击对内膛的变形影响
经过1 500次冲击试验后,使用测量工具对镜座所在位置前端和后端的阳线、阴线进行测量,测量结果表明:试验前、后内膛测量尺寸的偏差值为0.01~0.03 mm,其试验结果如图8所示。通过分析认为,导致该结果的原因有:① 试验前和试验后测试点的位置发生了偏离;② 测量工具的测试误差,如定心误差[7]、活动测头磨损或卡滞[8-9]等;③ 操作误差,如固定测头选用不当、零位调整不准确以及读数误差[10]。而无坐力炮弹丸的弹带过盈量[11-12](不同火炮的弹带过盈量有所不同)约为0.25 mm,冲击试验造成的尺寸偏差会减小弹丸与内膛间的摩擦力,但其不足以影响射击精度。
图8 镜座前端、后端内膛尺寸偏差
基于以上分析认为,瞄准镜作用于身管后对内膛尺寸的影响可忽略不计,镜座与复合身管的绑缚连接,不会因为瞄准镜的拉扯作用而影响膛线尺寸的变化,镜座绑缚连接可靠、稳定。
2.3.3冲击对系统瞄准的影响
镜座作为无坐力炮和瞄准镜的连接机构,在其使用寿命期内能正常、稳定发挥其机构功能的作用,对可靠性来说至关重要,从2.3.1节中可知,镜座能满足对系统的贡献。除了镜座自身可靠性外,它对系统内可靠性的影响主要有:① 承载瞄准镜的镜座受力后对其连接处身管的拉扯作用是否会造成内膛变形失效;② 承载瞄准镜的镜座受力后的自身物理性变化是否影响系统的瞄准。为验证复合身管镜座对系统瞄准的影响,使用A瞄准镜进行冲击试验、B瞄准镜作为对照标准,试验结果如表2所示。
表2 冲击试验前、后的系统零位走动量
通过冲击试验结果可知:A瞄准镜的系统零位走动量在0.2 mil以内,B瞄准镜的系统零位走动量≤0.2 mil。结合400 m立靶密集度试验而言,当系统零位走动量为0.2 mil时,弹丸着靶的距离偏差值约为8 cm,若其他因素恒定时,系统零位走动量在0.2 mil以内时,对立靶密集度的结果影响较小。说明复合身管采用绑缚形式固定镜座后,不会受瞄准镜的拉扯而产生自身物理性变化,对系统的瞄准射击具有较为可靠的贡献值。
3 结论
采用绑缚形式复合身管镜座结构的冲击测试分析表明:
1) 镜座是复合身管和瞄准镜的连接机构,射击过程中,瞄准镜的运动对镜座的拉扯作用不会造成绑丝的松脱、崩丝和镜座的松动,但是镜座前端的圆弧表面有轻微磨损,尺寸增大约0.004 mm,对镜座功能的正常实现无影响,可作为无坐力炮复合身管与瞄准镜的连接机构使用。
2) 复合身管上镜座在受瞄准镜的作用力后,造成镜座处身管膛线尺寸变化值为0.01~0.03 mm,对射击效果的影响在允许范围内。
3) 无坐力武器复合身管配装瞄准镜后的系统零位走动量小于0.2 mil,对于400 m立靶密集度试验而言,弹丸着靶的距离偏差值约为8 cm,满足射击精度要求,基于复合身管的无坐力武器瞄准系统连接方式稳定、可靠,可为同类武器系统瞄准系统的连接方式提供设计参考。
4) 实弹射击过程中,Y、Z方向振动加速度较X方向大,后续需要在实弹射击过程中对这种接触配合造成加速度差异的原因进行分析,确认发生的原因并加以改进。
