基于深度学习的FDA-MIMO雷达协方差矩阵缺失数据恢复方法
2023-11-06丁梓航谢军伟
丁梓航 谢军伟 王 博
①(空军工程大学防空反导学院 西安 710051)
②(空军工程大学空管领航学院 西安 710051)
1 引言
频控阵(Frequency-Diverse Array,FDA)雷达因其在发射阵列中的各个阵元间增加了一个微小的频偏而产生了距离-角度-时间三维相关的波束[1],相较于常规的相控阵雷达,频控阵雷达具有更加灵活的波束调控方式。因此,频控阵雷达这一概念自2006年被提出后[2],便受到了广泛的关注和研究[3–6]。但频控阵雷达的发射能量在空间中的分布随时间变化,这一特性导致其发射波束能量无法长时间聚焦于某个空域位置。
为了解决频控阵雷达波束的时变性问题,一种频控阵与多输入多输出(Multi-Input and Multi-Output,MIMO)技术相结合的雷达体制被提出[7],该体制不仅会消除波束的时间相关性还能够实现波束在角度和距离维度上的解耦合。因此,FDA-MIMO雷达具有角度-距离相关的波束性能,且通过MIMO技术扩展了该雷达系统的自由度,使其能够在多个雷达应用领域发挥一定的优势,如包络距离-角度联合估计[8,9]、有源干扰压制[10–13]、目标检测与跟踪[14–16]、空时自适应处理[17–20]等。
面对日益复杂的电磁环境,有源干扰信号给雷达系统带来了巨大的挑战。基于FDA-MIMO雷达的自适应波束形成算法能够有效地压制空域内的有源干扰信号[10–12,21,22]。这些波束形成算法的实现都依赖于采集到的干扰信号协方差矩阵,因此协方差矩阵数据不完整或者缺失时,会严重削弱雷达系统的波束形成效果和抗有源干扰能力。而协方差矩阵数据缺失现象主要原因来自以下两个方面:
(1) 当雷达接收系统对回波信息进行采样时,内部的存储设备容易受到工作条件、电磁干扰和内部器件老化的影响,从而使得采集得到协方差矩阵内的数据与真实数据存在偏差甚至造成数据的缺失;
(2) 接收阵元通道中的器件产生的噪声信号,以及模数转换器等发生故障,导致部分通道无法正常工作,从而造成采集协方差矩阵数据的缺失。
针对矩阵数据缺失的补全问题,很多文献采取添加合理性判断条件的方式以保证数据恢复的可信性。一种基于最大期望(Expectation-Maximization,EM)算法的求解技术被广泛应用于矩阵缺失数据恢复中[23,24]。文献[25]提出了一种利用杂波协方差矩阵的结构特点,通过改进的EM算法实现对协方差矩阵数据的恢复,并将这一技术应用于波束形成和目标信号检测。文献[26]提出了针对不同缺失条件矩阵的无偏协方差估计器,并推导了对应的误差界限。一种基于不完整数据条件下稳健的低秩协方差矩阵估计方法被提出[27],该方法主要利用EM算法和矩阵特征值分解来实现低秩协方差矩阵数据的恢复。Xu等人[28]利用迁移学习网络实现了步进频雷达缺失信号数据的恢复。以上研究主要集中在利用合理性判断条件和协方差矩阵结构特点来实现对缺失数据的补全。文献[29]利用先验数据及经验结合深度神经网络以实现数据的恢复。但利用深度学习来实现协方差矩阵缺失条件下的自适应波束形成的研究仍比较匮乏。
近年来,深度学习被应用于雷达的多个领域,与传统算法相比,一定程度上提升了雷达的工作性能。文献[30–32]提出了基于全连接网络的波束形成算法,将协方差矩阵作为网络的输入,波束形成矢量作为网络的输出。此外,文献[33]提出了一种基于卷积神经网络的波束形成算法,实验表明该网络形成波束的性能优于常规的全连接网络。但以上研究内容均是在已知完整的协方差矩阵基础上实现波束形成,并没有考虑协方差矩阵数据缺失的情形。
基于以上分析,本文主要研究了基于随机缺失的FDA-MIMO雷达干扰加噪声协方差矩阵的数据恢复问题,并在此基础上构建了协方差矩阵恢复-自适应波束形成的抗有源干扰框架。首先建立双通道生成对抗网络(Generative Adversarial Network,GAN),利用先验协方差数据对该网络进行训练,以实现缺失协方差矩阵数据实部和虚部的同时恢复。在完成协方差矩阵数据恢复后,利用自适应波束形成算法对FDA-MIMO雷达波束进行优化,以实现对有源干扰信号的压制,提升雷达系统的抗干扰能力。本文的主要工作和创新点体现在以下3个方面:
(1) 提出了一种基于深度学习的FDA-MIMO雷达干扰加噪声协方差矩阵数据恢复算法;
(2) 建立了双通道GAN网络,通过构建两个相互独立且结构相同的网络,分别对协方差矩阵数据的实部和虚部进行恢复,从而实现了干扰加噪声协方差矩阵缺失数据的恢复;
(3) 本文所提方法在不同的数据损失率条件下均能够实现矩阵数据的高精度恢复。
2 数据模型
2.1 FDA-MIMO雷达信号模型
考虑一个发射和接收阵列均为均匀线性阵列的收发共置FDA-MIMO雷达。其中,该雷达发射阵列含有M个发射阵元,接收阵列包含N个接收阵元,相邻阵元间距为d=λ/2(λ为波长)。
在FDA-MIMO雷达的发射阵列中,设置相邻发射阵元之间的频率增量为∆f,则第m个发射阵元的总频率可以表示为
其中,f0表示发射阵元的载波频率。若第m个发射阵元的基带信号为φm(t),则第m个阵元的发射信号表达式为
Et为阵列信号发射总能量,T表示雷达脉冲持续时间。基带信号φm(t)满足正交条件:
其中,(·)∗表示共轭操作。
假设空间中的远场目标位于(θ,r),经过目标反射,第n个接收阵元接收到来自第m个发射阵元发射的信号表达式为
其中,α表示目标复反射系数(由信号发射幅度、相位、目标反射系数、传播路径衰减等组成),τm,n表示从第m个发射阵元到第n个接收阵元之间往返信号的时延,其表达式为
其中,c 表示电磁波传播速度,τ0=2r/c。
在窄带信号假设下,存在近似关系φm(tτm,n)≈φm(t-τ0)。基于以上分析,第n个接收阵元接收到目标回波信号的表达式为
当发射频偏大小满足M∆f ≪f0时,式(6)中的近似关系成立。
信号被雷达接收系统接收后,会经过一系列的信号处理过程。本文采用文献[34]提出的一种基于多匹配滤波器的FDA-MIMO雷达的接收处理系统。当接收阵元接收到目标反射信号后,首先需要经过混频处理,即将接收信号与e-j2πf0t混频,得到:
其中,α0=αej2πf0τ0。接下来,将每一个接收通道的信号分别输入M组匹配滤波器通道中进行处理。在第l个匹配滤波通道,接收信号首先在数字端与ej2π(l-1)∆ft(l=1,2,...,M)进行混频,然后将混频后的信号与(t)进行匹配滤波,获得第l个匹配滤波通道的输出结果
将式(7)代入式(8),得到:
将N个接收通道分别经过M组匹配滤波器处理后得到的输出信号排列成一个MN ×1维的列向量
其中,a(θ,r)=ar(θ)⊗a1(θ,r)
2.2 干扰加噪声协方差矩阵构造及波束形成算法
本节主要介绍FDA-MIMO雷达接收干扰加噪声信号协方差矩阵的构造方法以及基于最小均方无畸变响应(Minimum Variance Distortionless Response,MVDR)的最优接收滤波器的设计方法。最优滤波器设计方法用来评估协方差矩阵的恢复。
假设空间中存在多个有源干扰信号,且分别位于空间位置(θp,rp) (p=1,2,...,P),则FDA-MIMO雷达接收到的干扰加噪声信号可以表示为
其中,αp表示第p个干扰信号的幅度,P为干扰信号总数。接收信号协方差矩阵可以表示为
其中,E{·}表示求取期望操作,(·)H表示共轭转置操作。定义第p个干扰信号的干噪比(Interferenceto-Noise Ratio,INR)为/。
设置波束指向的期望方向和距离分别为(θ0,r0),接收滤波器矢量为w ∈CMN,自适应波束优化问题可以描述为
采用经典的MVDR算法[35],得到最优接收滤波器矢量
其中,(·)-1表示矩阵求逆操作。
在式(19)的基础上,雷达系统接收信干噪比(Signal-to-Interference-plus-Noise Ratio,SINR)可以表示为
从式(20)可以看出,雷达接收SINR性能与干扰加噪声协方差矩阵相关,若干扰加噪声协方差矩阵出现数据缺失的情况,将极大程度影响接收SINR性能,引起雷达系统的抗干扰能力下降等诸多问题。因此,如何有效地对信号协方差矩阵缺失数据进行精准的恢复对于雷达系统稳定工作是至关重要的。
3 数据缺失机制及网络框架构建原理
本节主要介绍了数据随机缺失机制下基于双通道GAN网络的矩阵数据恢复方法。在网络中引入生成器(G)和鉴别器(D)两种网络,通过两个网络之间的相互对抗来实现对矩阵缺失数据的恢复。特别地,在网络构建中,考虑到协方差矩阵为复数矩阵,本文构造了两个具有相同结构的网络,分别实现矩阵缺失数据实部和虚部的有效恢复。
3.1 数据随机缺失机制
考虑到雷达协方差矩阵数据丢失的随机性,本文假设协方差矩阵满足随机缺失规则,即矩阵中的所有位置的元素都拥有同样的缺失概率,该缺失机制的数学描述如下:
根据第2节对FDA-MIMO接收干扰信号协方差矩阵的建模,该协方差矩阵的维度为MN ×MN,并将协方差矩阵Rin拉伸排列成一个(MN)2维的向量,该向量表示为x=[x1,x2,...,。设置一个维度同为(MN)2的掩码向量m=[m1,m2,...,,其中mk ∈{0,1},k=1,2,...,(MN)2服从0-1分布,且mk=0的概率为ε(ε即为数据损失概率)。若mk=0,表示xd处的数据出现缺失,反之则表示该处数据被完整保留。定义一个新的向量˜x来表示x出现数据缺失后的数据向量,该向量中的元素可以被描述为
数据恢复的目的是找到数据缺失的位置并将该位置的数据恢复到和原始矩阵相一致,即将完全恢复成x。为了实现该目标,受到基于深度学习的图像恢复方法的启发,本文提出了一种双通道GAN网络来实现对协方差矩阵缺失复数数据的恢复。
3.2 双通道GAN网络框架与原理
本节描述了双通道GAN网络框架的组成部分,并对网络中的各个组成部分的作用及原理进行了解释和分析。FDA-MIMO雷达信号协方差矩阵中的数据均为复数类型,因此本文在GAN网络的基础上增加了一个通道以实现对数据实部和虚部共同处理,整体网络框架如图1所示。
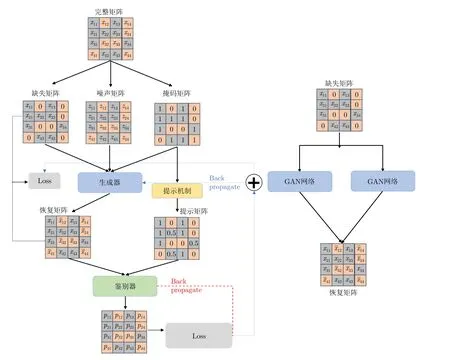
图1 双通道GAN网络的框架Fig.1 The framework of dual channel GAN network
通过网络的整体框架可以观察到,双通道网络结构建立在常规GAN网络的基础上,分别引入了两个相同的生成器G和鉴别器D,其分别用于数据实部和虚部的产生。下面对网络框架中的各个组成部分的功能和原理进行详细的分析。
A.生成器(Generator)
生成器网络的输入由矩阵缺失后的数据,掩码向量m,以及设置的扰动向量z∈C(MN)2这几部分组成,输出为一个(MN)2维的向量。令生成器网络函数为G,则生成器网络的输出x¯可以表示为
在网络完成训练后,通过式(23)实现对缺失数据矩阵的恢复。
B.鉴别器(Discriminator)
在GAN网络中,鉴别器是通过作为生成器的对手来实现对生成器网络的训练。而在所提网络的框架中,D网络并不是像常规的GAN网络只需要判断生成器的输出结果是完全正确的或者是完全错误的,而是需要鉴别在输出向量每个位置的真假,即输出预测的掩码向量。
设置鉴别器网络函数为D,整个网络可以表示为如下形式
其中,h为一种提示机制(Hint)生成的向量,下一部分将对网络中的提示机制进行介绍。
C.提示机制(Hint)
引入提示机制的目的是强化生成器和鉴别器的对抗过程。向量h是由m经过人为设置的变换策略所得到的,将其作为鉴别器的一项扩展输入,以实现对鉴别器的训练。
h的选择需要遵守一定的法则,文献[36]提出了一种关于h的有效设计方法,该方法的数学描述为
D.网络训练目标
整个网络框架中,通过最大化和最小化预测掩码向量的正确率分别实现D网络和G网络的训练。定义函数V(D,G)
其中,log(·)表示取以2为底的对数操作,是由G网络输出得到的。
GAN网络的训练目标可以被描述成一个minmax优化问题
定义损失函数
ai,bi分别表示a和b中的第i个元素。式(27)可以重新表示为
4 矩阵数据恢复算法
对式(29)中描述的min-max优化问题通过迭代的方法进行求解[36]。需要强调的是,生成器G和鉴别器D网络的结构均为全连接神经网络。两个网络的迭代训练过程如下:
首先固定生成器G,对鉴别器D采用小批量数据(一个批次的样本数量为JD)进行训练,定义损失函数
在一个训练批量中,D网络参数训练过程可以被描述为求解以下优化问题
m(j),(j),b(j)表示在一个批次中的第j个样本,且(j)=D((j),h(j))。
当D完成一个批次的训练时,固定D网络的参数,随机抽取样本数量为JG的小批量数据对G网络进行训练。为了提高G网络的训练效率,定义两种不同的损失函数,其中第1种的表达式为
第2种损失函数的表达式为
从两种损失函数的定义表达式可以看出,LG是用来表征数据缺失部分,在mi=0的条件下,i的取值越接近于1,则LG的值越小。LM则是用于表征可观测数据部分,G网络的输出越接近于矩阵观测值,LM的值越小。因此,通过最小化两种损失函数的线性组合以实现对G网络的训练,该优化问题可以表示为
其中,β为一个取值大于0的系数。
双通道GAN网络中的两组鉴别器和生成器均采用以上步骤来完成网络的训练,且二者的训练过程是相互独立的,整个算法的伪代码如算法1所示。
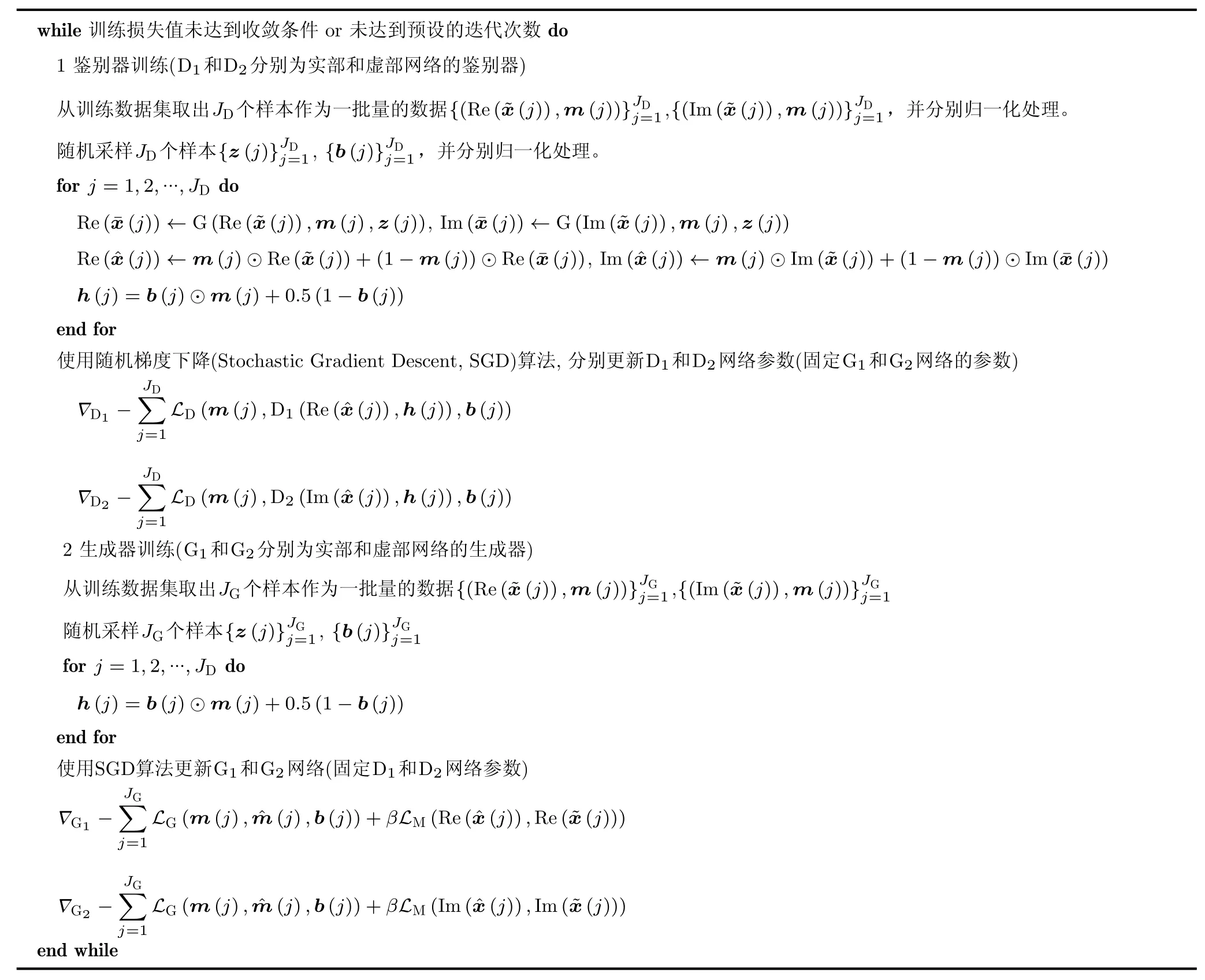
算法1 双通道GAN伪代码Alg.1 Pseudocode of dual channels GAN network
其中,Re(·),Im(·)分别表示取数据实部和虚部操作。
5 仿真分析
本节利用数值仿真验证了所提FDA-MIMO雷达干扰加噪声协方差矩阵缺失数据恢复方法的有效性。主要内容包括数据集(训练集和测试集)的构建,双通道GAN网络对信号协方差矩阵的恢复效果分析,不同数据损失率及网络层数对所提算法性能的影响,以及协方差矩阵恢复前后的波束形成性能比较,不同缺失数据恢复方法性能比较等方面进行仿真实验。在双通道GAN中,两个独立通道的网络结构始终保持一致。其中,鉴别器和生成器网络均为全连接神经网络,上述两种网络的具体结构如图2所示,均为6层全连接网络。本文使用深度学习环境Pytorch1.9对双通道GAN网络进行搭建和训练。
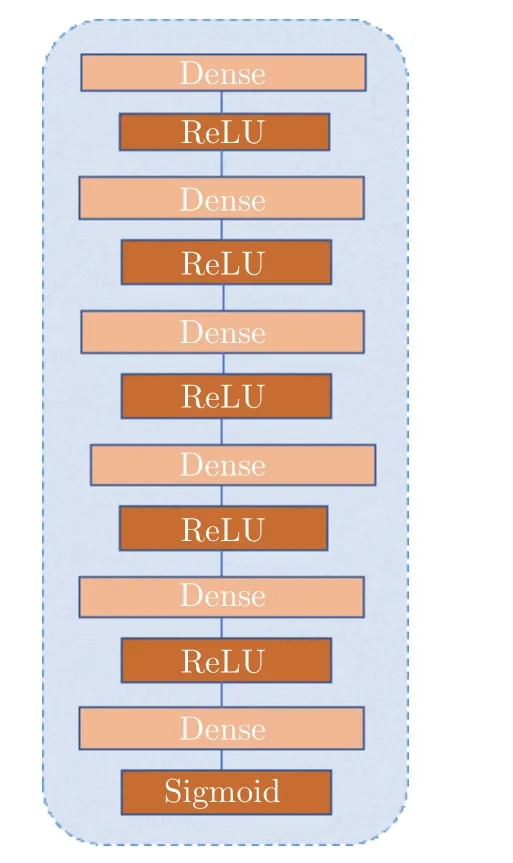
图2 鉴别器和生成器网络结构Fig.2 The structure of D and G network
5.1 数据集(训练集和测试集)构建方法
本节介绍了网络训练所需数据集的构建方法。在数值仿真中,FDA-MIMO雷达的参数设置情况如下:发射阵元和接收阵元数量分别为M=8和N=6,发射频偏采用线性频偏样式,且相邻阵元间频偏为∆f=6 kHz,发射和接收阵列中的阵元间距均等于半波长宽度。
设置干扰信号源个数1,干噪比(INR)为5 dB。干扰信号源在空间中的角度变化范围为[20◦,50◦],角度间隔为 5◦。干扰信号距离变化范围是[20 km,50 km],间隔为5 km。利用2.2节提出的干扰加噪声协方差矩阵的构造方法,获得来自不同角度和距离的干扰加噪声信号的协方差矩阵数据(总计49个维度为MN ×MN的协方差矩阵),并将每一个空间位置对应的协方差矩阵复制300份,得到由(49×300)个协方差矩阵构成的数据集。为了适应网络输入,每一个协方差矩阵都将转化为1×M2N2的向量。因此,整个数据集的维度变为(49×300)×M2N2。接下来按照训练集:测试集等于4:1的配比,分别对训练集和测试集进行划分,完成数据集的构建。需要说明的是,当该数据集用于网络训练时,需要对数据进行规范化处理,即将数据均映射到[0,1]取值区间内。由于G网络和D网络均为全连接神经网络,因此其网络的计算复杂度可以分别表示为BG=O(NInputGN1+N1N2+N2N3+N3N4+N4NOutputG),BD=O(NInputDN1+N1N2+N2N3+N3N4+N4NOutputD),则所提双通道GAN网络总的计算复杂度为O(2BG+2BD),其中NInputG,NOutputG表示G网络的输入和输出数据维度,NInputD,NOutputD表示D网络的输入和输出数据维度。Ni(i=1,2,3,4)表示第i层的神经元个数。
5.2 协方差矩阵恢复效果分析
双通道网络训练参数设置情况如下:矩阵数据丢失率ε=0.3,一个批次中的样本数为JD=JG=128,训练过程中的迭代次数为10000,两个网络的学习率均设置为0.001。
当双通道GAN网络完成训练后,为了验证所提矩阵缺失数据恢复方法的有效性,随机选择测试集中的一组协方差矩阵数据(该样本对应干扰信号的距离和角度分别为35 km,45◦),利用经过训练的双通道GAN网络对该协方差矩阵的缺失数据进行恢复。完整的协方差矩阵,缺失后的协方差矩阵,未经过训练网络输出的恢复矩阵,完成训练后网络输出的恢复矩阵等4种矩阵的实部和虚部对应的灰度图如图3和图4所示。
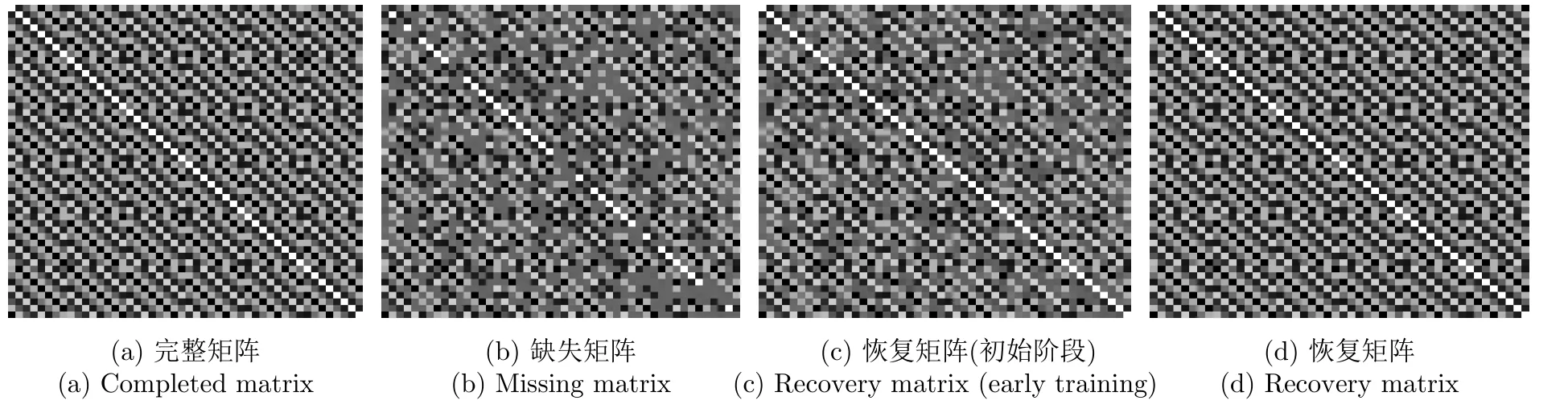
图3 协方差矩阵实部灰度图(单干扰源)Fig.3 The grayscale image of the real part of covariance matrix (single interference)
从图3和图4矩阵实部和虚部的灰度图可以看出,矩阵数据的缺失破坏了干扰加噪声协方差矩阵数据的结构,对雷达系统后续的处理造成很大的麻烦,影响雷达系统的工作性能。经过训练后的双通道GAN网络能够有效地对FDA-MIMO雷达干扰加噪声协方差矩阵数据进行恢复,且恢复程度较高,而未经过训练的网络的恢复效果较差,仍包含较多缺失数据。
5.3 不同数据损失率及网络层数对所提算法性能的影响
在所提矩阵数据恢复方法有效性被验证的基础上中,本节主要分析了不同数据损失率ε以及网络层数k的变化对矩阵缺失数据恢复性能的影响。仿真参数与5.2节一致。为了定量地评估矩阵数据恢复性能,引入均方根误差(Root Mean Squared Error,RMSE),其表达式为
设置网络层数为6,图5表示数据损失率分别在ε=0.2,0.3,0.4,0.5的4种情况下,网络训练过程中矩阵数据恢复的RMSE变化情况。从图5可以看出,对于4种不同的损失率,所提算法均能够有效地实现网络训练的收敛,且具有几乎相同的收敛速度,当网络训练达到收敛时,ε=0.5对应的矩阵数据恢复的RMSE最大。
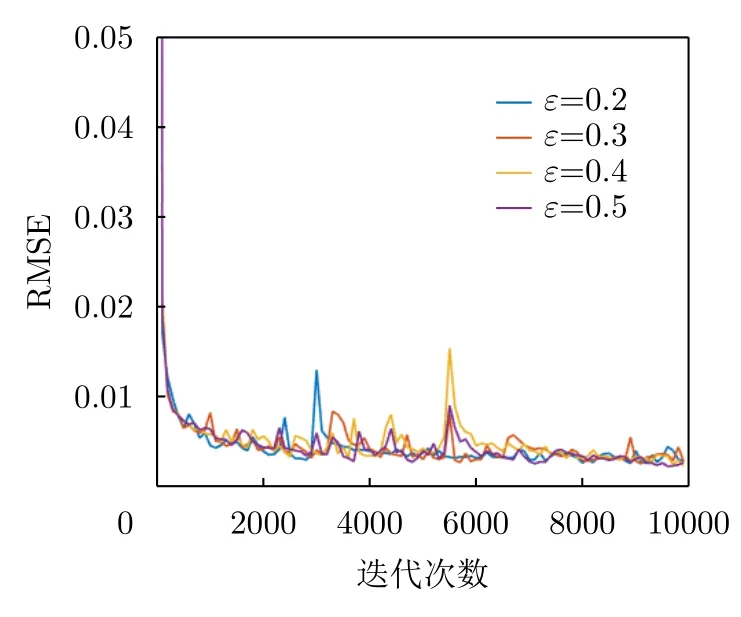
图5 矩阵恢复数据的RMSE在训练过程中的变化情况(不同损失率 ε)Fig.5 RMSE performance versus training process (different ε)
此外,为了定量地描述不同损失率对矩阵数据恢复算法性能的影响,将测试集中的所有样本输入到训练完成后的双通道GAN网络中,计算整个测试集对应矩阵恢复数据的平均RMSE。不同数据损失率对应的RMSE结果如表1所示。随着数据损失率的提高,所提矩阵数据恢复算法的性能将会出现一定程度的下降。尽管如此,所提方法仍能够将协方差矩阵恢复数据的误差控制在精度为1E–02的范围内,该结果同时也验证了所提算法的鲁棒性。

表1 测试集矩阵恢复数据的平均RMSE(不同损失率 ε)Tab.1 Average RMSE of the missing data recovery (different ε)
G和D网络结构在一定程度上将对矩阵数据恢复性能产生影响,因此考虑不同的网络层数(k=3,6,9)对网络训练过程和矩阵恢复表现的影响。矩阵恢复数据的RMSE在训练过程中的变化情况如图6所示。在训练开始阶段,相较于3层神经网络结构,6层和9层网络可以在一定程度上提高训练的收敛速度。
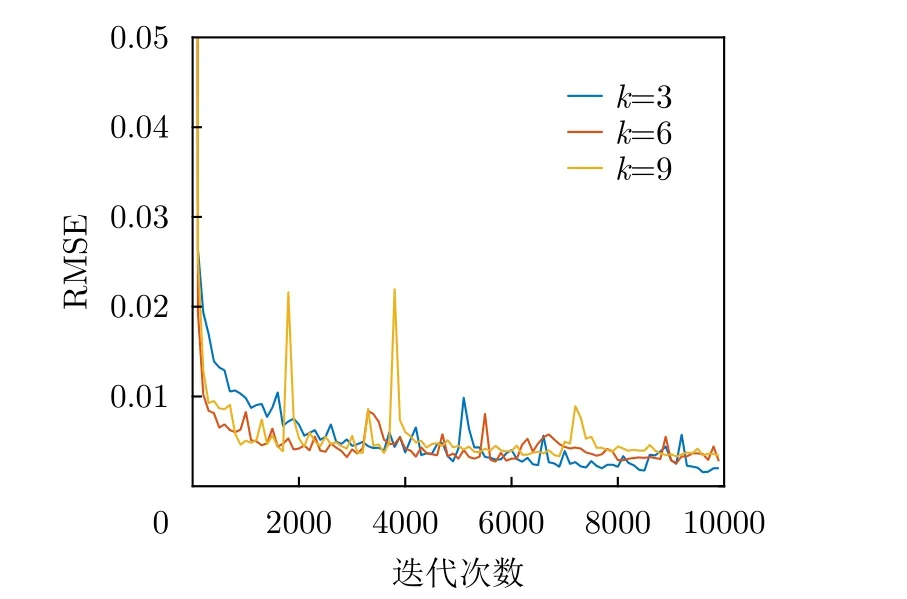
图6 矩阵恢复数据的RMSE在训练过程中的变化情况(不同网络层数k)Fig.6 RMSE performance versus training process (different k)
3种结构的网络完成训练后,通过测试集对网络的数据恢复性能进行评估,评估结果如表2所示。从3种网络对应的测试集平均RMSE表现可以看出,相较于k=3,9,当k=6时,整个网络能够获得最优的恢复性能,而k=3对应网络的数据恢复性能最差。因此,需合理选取全连接网络的层数,以获得较好的训练性能。
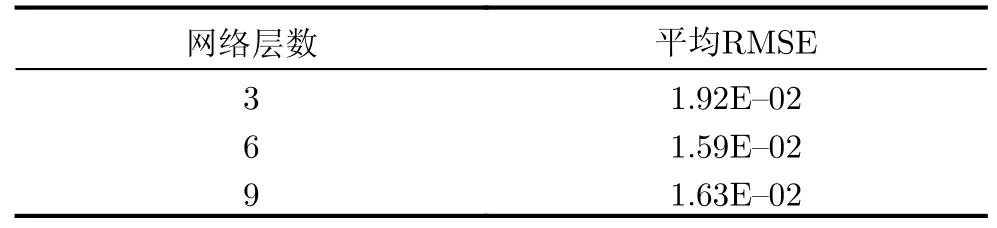
表2 测试集矩阵恢复数据的平均RMSE(不同网络层数k)Tab.2 Average RMSE of the missing data recovery (different k)
以上仿真结果表明,所提算法通过合理设置网络参数和结构能够高精度地完成协方差矩阵缺失数据的恢复和补全。为了进一步阐明所提算法的优势,分别引入EM算法[25]、随机森林[37]、降噪自编码器[29]等3种已被提出的缺失数据恢复方法,比较4种不同方法对缺失数据的恢复精度。利用不同方法对测试集数据进行恢复得到的平均RMSE结果如表3所示。
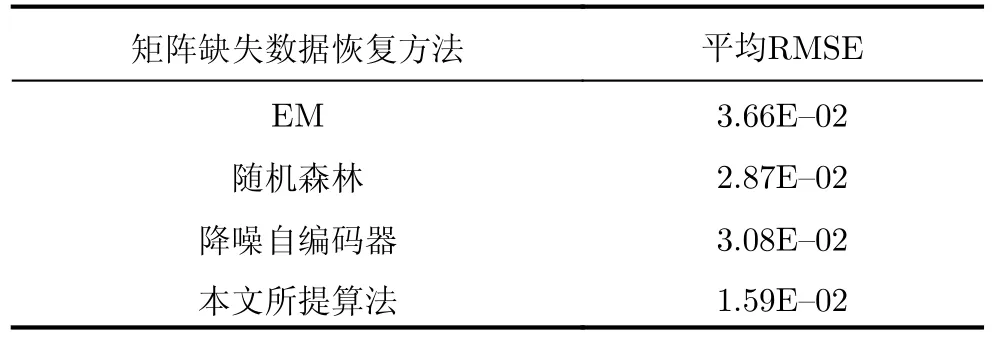
表3 测试集矩阵恢复数据的平均RMSE(不同方法)Tab.3 Average RMSE of the missing data recovery(different methods)
从表3结果可以看出,本文所提算法相较于其他3种方法具有明显的缺失数据补全精度优势,验证了双通道GAN网络对缺失数据恢复的有效性。
5.4 协方差矩阵恢复前后的波束形成性能比较
协方差矩阵数据的缺失会对整个协方差的结构造成很大程度的影响,直接导致自适应波束形成算法无法准确地形成期望的波束。为了验证所提方法对协方差矩阵的恢复效果以及FDA-MIMO雷达波束形成的性能的影响,本节重点对利用恢复后的干扰加噪声协方差矩阵形成的波束性能进行仿真分析。仿真参数的设置与5.2节相同,设置目标信号在空间中的位置为(20◦,30 km),选取测试集中的一个样本,该样本对应干扰信号的空间位置为(45◦,35 km)。利用2.2节所述的自适应波束形成算法,分别得到完整协方差矩阵、缺失协方差矩阵和恢复后协方差矩阵对应的FDA-MIMO雷达波束方向图,上述3种波束方向图如图7所示。从仿真结果可以看出,完整协方差矩阵和恢复协方差矩阵对应形成的波束方向图十分接近,且均能够在干扰信号位置形成稳定的零陷,而缺失协方差矩阵对应的波束方向图相较于其他两种协方差矩阵产生了巨大的畸变,且无法在干扰信号位置形成有效的零陷。此外,利用完整协方差矩阵和恢复协方差矩阵得到的SINR值分别为–39.67 dB,–39.06 dB,这一结果表明本文所提算法能够对FDA-MIMO雷达缺失信号协方差矩阵进行高精度的恢复,且极大程度保留了FDAMIMO雷达的抗干扰性能。
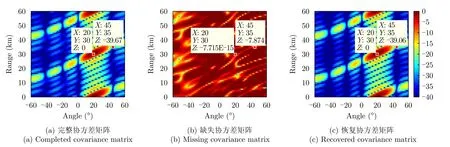
图7 基于不同协方差矩阵的FDA-MIMO雷达波束方向图(多干扰源)Fig.7 FDA-MIMO radar beampattern based on different covariance matrices (single interference)
5.5 多干扰源信号协方差矩阵恢复性能分析
为了验证所提双通道GAN网络对多干扰信号协方差矩阵缺失数据的恢复效果,本节引入两个位于不同空域位置的干扰信号,利用所提网络实现对两干扰信号的协方差矩阵进行缺失数据恢复。
首先对数据集进行构建,构建方法与5.1节类似,设置两个干扰源信号,干扰信号1在空间中的角度变化范围为[20◦,50◦],间隔为5°,距离变化范围是[10 km,50 km],间隔为5 km,干噪比变化范围为[0 dB,10 dB],间隔为2 dB。干扰信号2在空间中的角度变化范围为[0◦,15◦],间隔为5°,距离变化范围是[60 km,80 km],间隔为5 km,干噪比变化范围为[0 dB,10 dB],间隔为2 dB。
网络完成训练后,随机选择测试集中的一组协方差矩阵数据,其中干扰信号1在空间中的位置为(20◦,10 km),干扰信号2在空间中的位置为(10◦,60 km)。完整的协方差矩阵,缺失后的协方差矩阵,未经过训练网络输出的恢复矩阵以及完成训练后网络输出的恢复矩阵等4种矩阵的实部和虚部对应的灰度图如图8和图9所示。
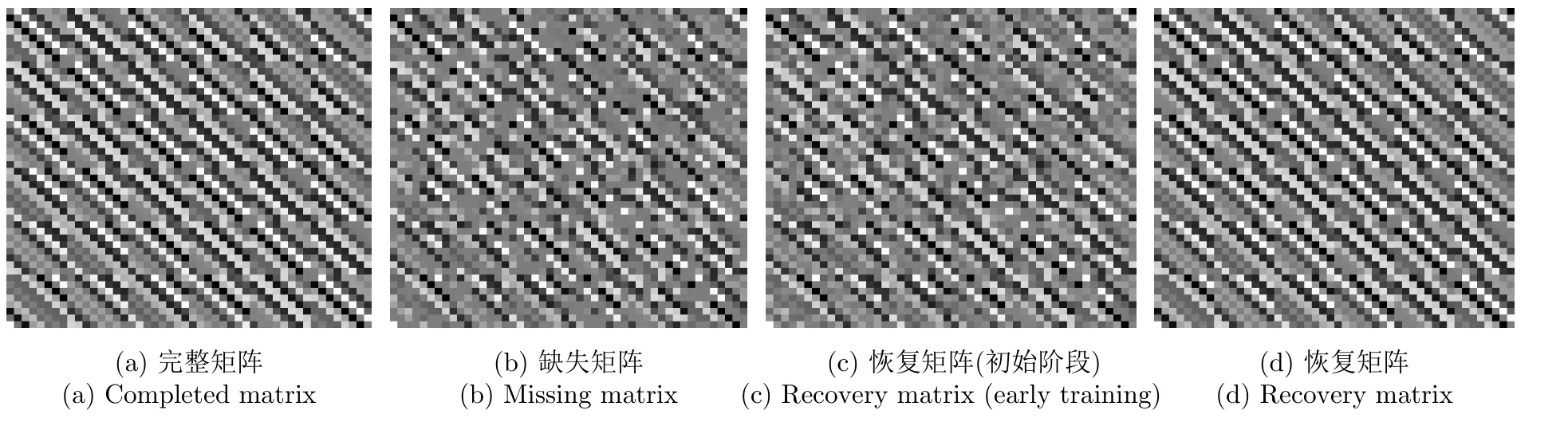
图9 协方差矩阵虚部灰度图(多干扰源)Fig.9 The grayscale image of the imaginary part of covariance matrix (multiple interferences)
以上仿真结果验证了所提网络能够对多干扰信号形成的协方差矩阵缺失数据进行有效的恢复。接下来,为了进一步评估所提方法对干扰加噪声协方差矩阵的恢复效果,设置目标信号的空间位置为(20◦,30 km)。利用2.2节所述的自适应波束形成算法,分别得到完整协方差矩阵、缺失协方差矩阵和恢复后协方差矩阵对应的FDA-MIMO雷达波束方向图,上述3种波束方向图如图10所示。从3个不同的波束方向图可以看出,经过所提方法对协方差矩阵补全后的波束性能与完整协方差矩阵基本一致,且对两个干扰位置的幅度波动均在1 dB以内,验证了所提方法能够有效保持在协方差矩阵出现数据缺失情况下的波束形成性能。
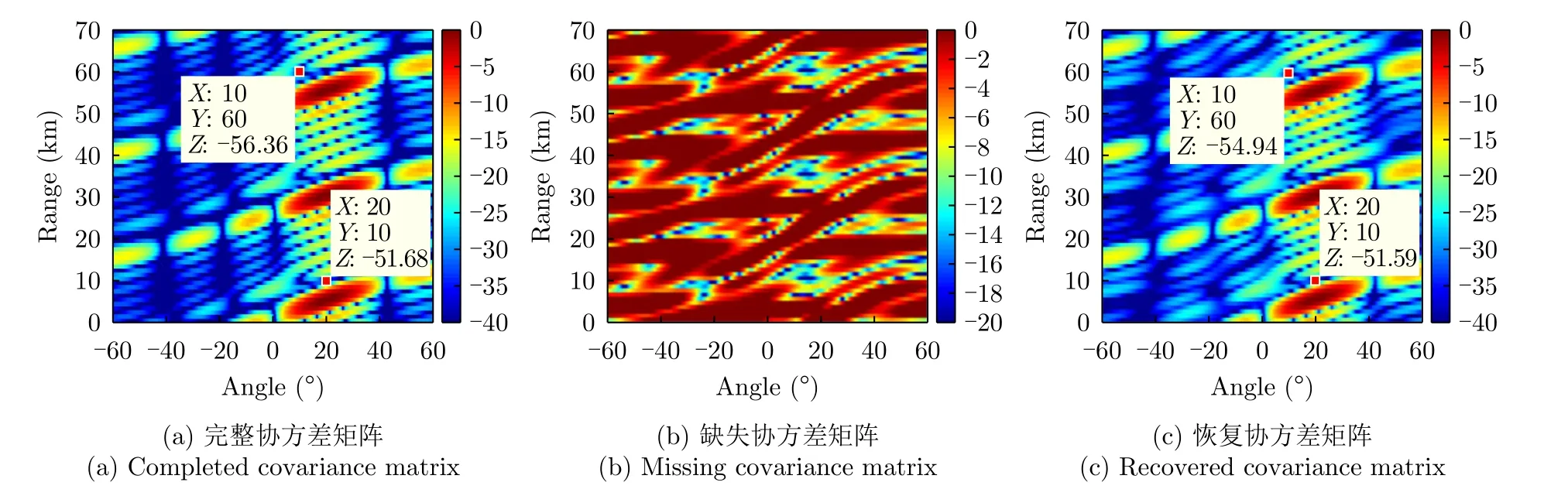
图10 基于不同协方差矩阵的FDA-MIMO雷达波束方向图(多干扰源)Fig.10 FDA-MIMO radar beampattern based on different covariance matrices (multiple interferences)
6 结语
本文提出了一种基于双通道GAN网络的FDAMIMO干扰加噪声协方差矩阵数据恢复方法。双通道GAN网络能够同时实现矩阵缺失数据实部和虚部的恢复。通过合理设计鉴别器和生成器网络的损失函数,实现两个网络之间在训练过程中的相互对抗,从而完成整个网络的训练。在此基础上,引入一种提示机制,用于提高鉴别器网络的训练效果。在数值仿真中,经过训练后的双通道GAN网络能够有效地对缺失协方差矩阵数据的实部和虚部进行恢复。此外,该算法也适用于对不同数据损失率,且能够将矩阵数据恢复精度控制在1E–02的量级内。本文还研究了鉴别器和生成器网络的层数对网络训练结果的影响,通过比较网络层数为3层、6层和9层3种结构,发现选择6层的网络结构获得的训练效果和矩阵数据恢复效果最优。在此基础上还将已有缺失数据恢复方法与所提方法性能进行了比较。最后,利用自适应波束形成算法分别生成完整的协方差矩阵、缺失的协方差矩阵和恢复的协方差矩阵对应的二维波束图,其中完整的协方差矩阵和恢复的协方差矩阵生成的波束方向图几乎相同,且SINR表现相差在1 dB的范围内,验证了本文所提矩阵数据恢复算法的有效性。
