基于自适应高程约束的TomoSAR三维成像
2023-11-06任子帅高雨欣
任子帅 张 照 高雨欣 郭 睿*
①(西北工业大学自动化学院 西安 710129)
②(西北工业大学电子信息学院 西安 710129)
1 引言
层析合成孔径雷达成像(Synthetic Aperture Radar Tomography,TomoSAR)技术是干涉SAR技术的延伸,通过对同一目标的多角度观测,可以反演其在高程向(垂直于方位向和斜距向平面)上不同高度的散射值,从而还原真实的SAR成像三维场景[1–5]。近年来,随着机载、星载SAR系统的不断成熟,高质量多基线SAR影像被成功获取,使得TomoSAR技术对地物高度向结构的重建成为可能。TomoSAR成像可解决由叠掩效应引起的SAR图像解译模糊问题[6,7],并在许多方面都有成功应用,例如城市监测、生物量估计、目标检测、冰川变化等[8,9]。TomoSAR成像技术因其独特的高程向成像能力,在还原建筑三维结构方面具有显著优势。TomoSAR能够沿高程向重建单个像元内的散射剖面,并提取各个散射体的高程位置和强度信息,进而还原建筑整体的三维结构并获得场景范围内的高精度建筑三维模型[10]。2010年以来,国内外学者对TomoSAR技术在还原建筑三维结构方面的应用进行了广泛的研究并取得了进展[11–13]。
TomoSAR高程反演的传统谱估计算法包括自适应波束形成算法(Capon)[14]、多重信号分类算法(Multiple Signal Classification,MUSIC)[15]等。由于受到了高程瑞利分辨率的限制,传统谱估计算法的改进空间有限。随着稀疏重构技术与算法概念的提出和发展,压缩感知(Compressed Sensing,CS)[16]已经成为TomoSAR高程反演的主流算法。压缩感知能突破奈奎斯特采样定理的限制,使用较少的非均匀观测样本恢复出原始稀疏信号。在数据集的获取方面,主要包括阵列SAR和多航过SAR。中国科学院空天信息创新研究院发布了机载阵列干涉SAR系统在山西运城市和四川峨眉山市飞行试验获取的部分数据,两个数据中都包含叠掩和阴影现象较严重的建筑区域[17]。德国宇航中心则利用TerraSAR-X多航过数据开展了大量的关于三维建筑重构的研究[18,19]。
然而TomoSAR往往存在严重的因相位缠绕导致的高程模糊问题。在高程反演过程中,若高程搜索范围超过最大不模糊高程,高程反演会出现周期性的峰值,产生伪影,影响成像结果。机载Tomo-SAR成像最大不模糊高程较小,高程模糊明显[20];多航过星载TomoSAR成像最大不模糊高程较大,但噪声水平更高,会存在其他伪影。目前专门针对TomoSAR高程解模糊的相关研究较少,但高程模糊是TomoSAR处理中不可忽略的问题之一。文献[21]利用圆迹SAR的全方位观测、解叠掩和解高程模糊优势,进行无先验模型的SAR三维成像;文献[22]采用互质采样子阵列提高TomoSAR处理中的观测并增大基线孔径解决采样不足引起的模糊问题,提高TomoSAR三维成像信噪比;文献[23]针对山地区域的TomoSAR成像,利用三维点云分割重组的方法进行高程解模糊;文献[24]中提到建筑高度超过最大不模糊高度时,传统TomoSAR三维点云会存在严重模糊,通过对三维重建的解空间进行约束提高三维重建效果,同时结合图像语义信息进行三维点云聚类,实现解模糊。
针对TomoSAR中的高程模糊本文提出一种自适应调整高程搜索范围的方法,该方法通过自适应的高程采样中心和搜索半径设置,使得高程向的模糊峰值被隔离,从而改善高程模糊和伪影问题。在实验中,针对机载阵列SAR数据和星载TerraSAR-X多航过数据,该方法能改善TomoSAR三维点云重建结果,并提出平均邻域高度差和散射体完整度评价指标验证该方法的有效性和广泛适用性。
2 TomoSAR成像原理
SAR影像每个像元的复数值是同一距离的各个高度目标后向散射信号在距离-方位成像平面的投影,换句话说,散射信号沿高程向的积分组成了像元值[25]。TomoSAR成像几何原理如图1,不同航过或阵列天线在垂直于距离向的方向上的距离称为基线,选取一个基线作为参考基线,第n景SAR影像对应的基线记为bn,∆b为基线跨度。目标在距离向与雷达天线的距离为斜距,记为r。雷达天线运动方向为方位向,记为x。与距离向和方位向正交的方向为高程向,高程向距离记为s。设参考基线对应的SAR天线S1获取的影像为主影像,天线Sn对应SAR影像的任一像素gn为[26]
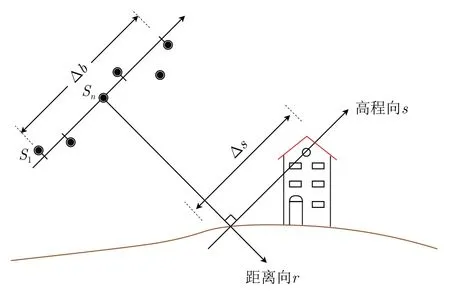
图1 TomoSAR三维成像几何模型Fig.1 TomoSAR 3D geometric model
其中,ξn=2bn/(λr)为高程向频率,λ代表波长。γ(s)为沿着高程向分布的后向散射强度分量,也是需要计算恢复的目标变量。从不同航过获取的N景SAR影像中,可以构造一个高程向的合成孔径。沿高程向的采样范围 ∆s进行L次均匀离散采样,则式(1)可以转化为
考虑N景SAR影像,将每幅SAR影像上同名像素点的复数值作为向量,可以得到:
其中,ε为噪声分量,Gnl代表观测矩阵元素:
此时,式(3)可简写为[6,27]
TomoSAR处理是根据预处理后的N景SAR影像中复数值向量g和构造的测量矩阵G,逆向求出沿高程向分布的目标散射强度γ,进而可以根据散射强度峰值、峰值个数和峰值位置计算散射体的强度、数目和高程向位置。
完成图像配准、通道误差补偿、大气相位误差补偿等的SAR数据预处理后,可以依据成像模型(5)通过Capon算法[14,15]、MUSIC算法[16]等谱估计算法或CS算法解算出高程向分布的散射体,实现Tomo-SAR三维成像。CS算法由Zhu和Bamler[11]首次引入TomoSAR,并利用TerraSAR-X聚束模式下的高分辨率数据验证该方法在欠采样下的超分辨率成像能力,CS算法得到的稀疏层析谱中可以分离高度相近的叠掩散射体。在实际应用过程中普遍使用L1范数的凸优化模型[28,29]:
其中,λk为岭估计参数,与噪声等级有关。相比于传统谱估计算法,CS算法重建的后向散射剖面不是连续的而是稀疏的,而且无需进行多视处理即可实现超分辨率成像。
3 高程模糊
3.1 高程模糊分析
由式(2)可知,SAR影像任一像素的相位部分包含散射剖面的高程信息:
式(7)相位项被缠绕在2π里并以2kπ为周期(k ∈Z),导致在利用相位解算高程散射剖面时出现伪影现象之一的高程模糊。且以下特点:高程向散射强度呈现周期性重复谱峰,其中一个谱峰为真实谱峰,其余为模糊谱峰;单个像素存在多个散射体的情况下(即叠掩散射体),不同散射体的真实谱峰和模糊谱峰会相互影响;三维点云成像结果中出现分层的伪目标,如图2。
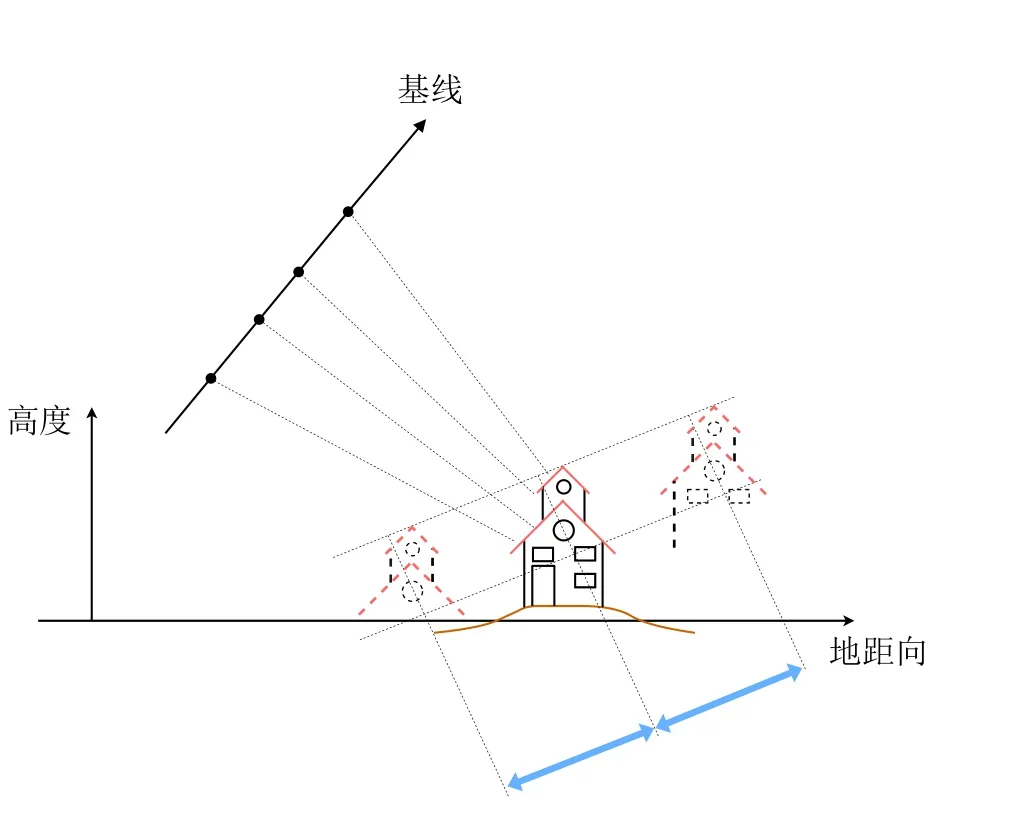
图2 高程向的伪目标示意图Fig.2 Pseudo target in the elevation
图2中伪目标与实像之间的高程距离在本文中作为高程模糊间隔或者最大不模糊高程。根据式(7),可以得到高程向模糊的间隔周期[30]:
其中,samb与载波波长λ、斜距r以及垂直基线bn有关。并且式(7)的相位项存在以下关系:
根据式(9),由于高程模糊间隔和谱峰周期性的存在,在TomoSAR提取散射体高程信息时会遇到3种问题:
(1) 多散射体高程距离差∆s′小于高程模糊间隔,并且小于瑞利分辨率ρs的情况下(即∆s′<ρs),一般的谱估计方法难以分离叠掩散射体。对于该问题可以利用CS算法来突破瑞利分辨率的限制。
(2) 多散射体高程距离差∆s′小于高程模糊间隔而且大于等于瑞利分辨率的情况下,但高程采样的搜索范围大于高程模糊间隔时(即ρs≤∆s′
其中,∆bmin为最小基线间隔。但这是一种浮动的约束,只提供了采样范围的最大跨度,没有提供一个采样中心。在面对实际数据时,特别是SAR天线相位中心高度较低的情况(如机载数据),建筑高度非常接近最大不模糊高度,该约束条件并不能完全满足一个准确的高程采样范围。本文基于实际应用过程中获得的经验,提出一种自适应高程采样范围定义来改善层析三维点云中的高程模糊现象。
(3) 当多散射体的高程距离差大于等于一个高程模糊间隔时(即∆s′ ≥samb),不同散射体的高程散射峰值会相互影响,给估计散射体正确的高程位置带来困难。针对该问题,一般的解决方式是优化基线分布,使得高程模糊间隔远大于目标场景的建筑高度;或者采用互质基线设计,在不影响瑞利分辨率和基线数量的情况下改善高程模糊。从式(10)中可以发现高程模糊间隔可以直接通过调整垂直基线而发生改变。优化基线分布同时对于SAR传感器的控制和分布有一定的要求,而且对于机载和星载等常用的SAR成像平台,散射体高程差不小于高程模糊间隔的问题一般不会存在,在本文不考虑。
3.2 高程模糊及其他伪影仿真
本节对TomoSAR单个像素的层析结果进行仿真分析,表1为仿真参数,针对基线短、基线均匀、斜距小的情况。根据表1中的仿真参数和均匀等距的基线分布进行TomoSAR仿真实验。实验假设高程向有两个散射体,散射体的归一化散射强度为1.0和0.6,分别设置5 m,60 m和120m的散射体间距,并加入了信噪比(Signal to Noise Ratio,SNR)为15 dB的高斯噪声。采用CS算法对单个像素的高程向散射剖面进行比较和分析。根据表1中的参数和式(8)进行计算,可以得到仿真数据的高程模糊间隔为100 m;根据瑞利分辨率的计算公式ρs=λr/(2∆bmax),可得仿真数据的瑞利分辨率为10 m。3种散射体间距的高程反演仿真结果如图3所示。
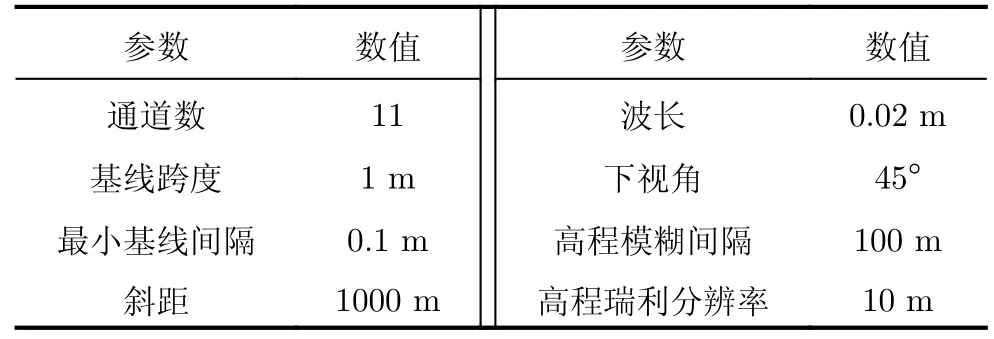
表1 仿真实验1参数Tab.1 Experimental parameters for the first simulation data

图3 仿真数据1的高程散射剖面反演结果Fig.3 Reconstruction results of elevation reflectivity profile of the first simulation data
在图3(a)中,散射体5 m的间隔已经小于仿真数据的瑞利分辨率,两个散射体得到了识别,模糊位置和真实散射体位置相距较大,分离比较方便。在图3(b)中,在散射体间隔60 m的情况下,两个散射体位置处均出现了峰值。但是在高程向采样搜索范围大于高程模糊间隔的情况下,会产生严重的高程模糊现象,每一个散射体都在间隔100 m的高程位置产生模糊峰值,模糊峰值与真实峰值的高度相当,而且两者的高程距离较近。在图3(c)中,散射体间隔120 m的情况下,散射体间距大于高程模糊间隔,真实散射体峰值和模糊峰值相互缠绕在一起,难以分辨。因此,如果高程采样的搜索范围设置不合适,会导致反演的高程散射剖面出现多余的峰值,导致错误地将局部模糊峰值当作目标散射体峰值,从而造成散射体高程位置估计错误。
此外,本文也对基线长、基线不均匀、斜距大的TomoSAR单像素层析进行仿真,表2为其仿真实验参数。该仿真实验假设中假设高程间距为120 m的两个散射体,归一化散射强度分别为1.0和0.6。该仿真数据的理论最大不模糊高程为428.6 m,高程瑞利分辨率为20 m。星载多航过SAR仿真数据的基线采用不均匀排列方式,最小基线间隔为21 m,最大基线跨度为450 m。由于最大不模糊高程较大,不易产生非常明显的高程模糊。但是由于不均匀的基线分布和因长距离探测导致的较低SNR,TomoSAR处理可能也会产生一些不规则的伪影。在仿真信号中加入了SNR为15 dB,10 dB和5 dB的高斯噪声,以模拟噪声影响。不同SNR下高程散射剖面重构结果如图4所示。
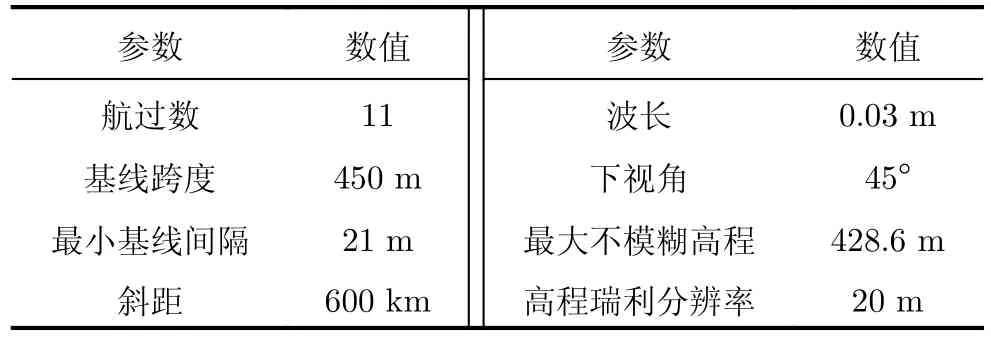
表2 仿真实验2参数Tab.2 Experimental parameters for the second simulation data
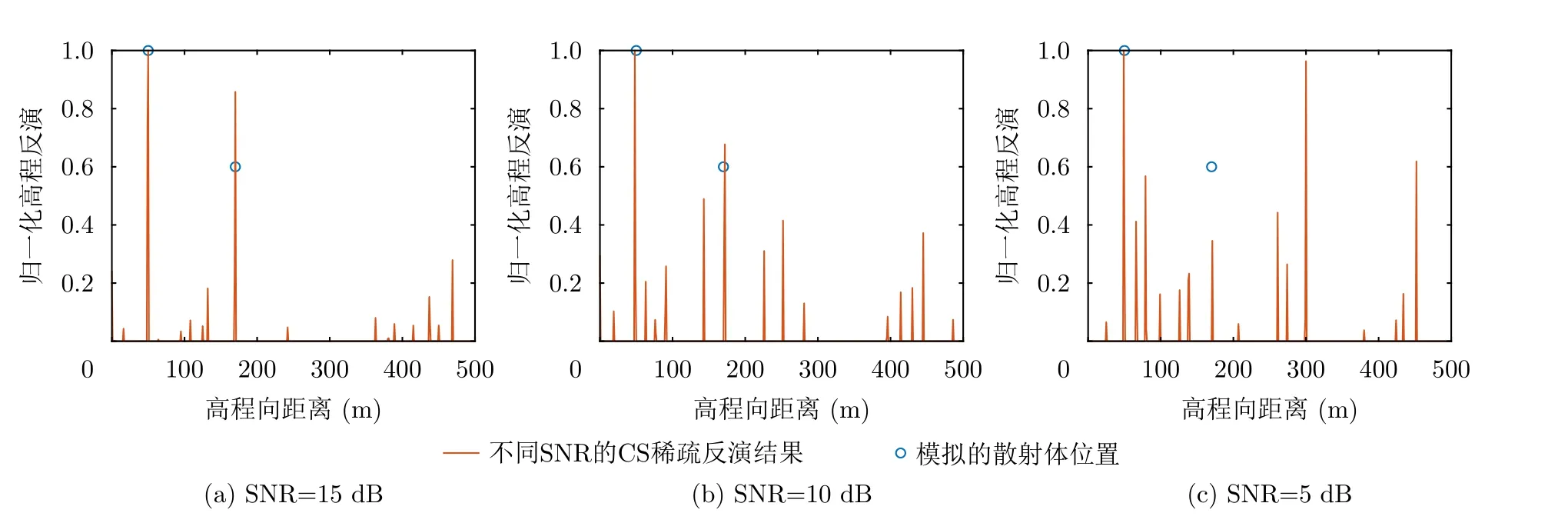
图4 仿真数据2的高程散射剖面反演结果Fig.4 Reconstruction results of elevation reflectivity profile of the second simulation data
在图4(a)中,SNR=15 dB时可以明显看出高程向有两个明显峰值,与真实散射体位置几乎重合。在图4(b)中,SNR=10 dB高程散射剖面出现多个较大的峰值,其中最高的两个峰值在真实散射体的位置。因为不模糊高程较大,仿真数据2中的伪影现象有一定程度缓解,在较高信噪比情况下没有出现大于真实散射体峰值的情况。在图4(c),随着信噪比降至SNR=5 dB,伪影现象已经非常明显,最高的两个峰值与真实散射体位置出现了偏差,表示噪声较大会加剧TomoSAR的伪影现象,因此也需要在TomoSAR处理过程中优化高程采样的搜索范围,以减少伪影的影响。
4 自适应高程搜索范围设置方法
根据上文的分析,在TomoSAR三维成像过程中的合适的高程搜索范围约束是有必要的。高程向搜索范围需要满足式(10)才能保证在层析模型的相位项被约束在一个周期内。但是式(10)的约束只提供了一个最宽松的条件,而且没有确定约束在高程向上的绝对位置,在实现中通常根据经验确定,得到的三维成像结果可能会存在高程模糊。因此,本文提出一种自适应高程搜索范围方法,以改善TomoSAR结果中的高程模糊现象。
自适应高程搜索范围方法结合场景高度等信息,确定高程搜索的采样中心和搜索半径,并根据每个像素的斜距方位索引,自适应设置高程搜索范围。方法具体实现如下:
(1) 场景最大高度预估计。一般TomoSAR中依据式(10)设置场景的高程范围,本文结合SAR影像中的叠掩信息[31],获取场景中的最高目标高度估计值,并将此作为场景的最大高度预估计hmax。
(2) 地面最低高度预估计。一般选择SAR影像中的一个地面像素点作为最低高度参考像素,即认为所选像素中散射体高度不高于其他散射体高度。可以在斜距向-高程向的坐标系中过参考点构建一条斜率为cotθ的直线,作为地面最低高度的约束。但是在实际TomoSAR处理过程中,地形地貌起伏等的影响会使得参考像素的高度与场景真实的最低高度不完全一致,导致高程搜索范围的约束下边界并不准确。因此,在实际应用中地面最低高度的估计还可以通过以下方式获得:先利用层析算法估计所有散射体的高度信息,重建未解模糊的三维点云;再将点云投影到斜距向-高程向的坐标系中;计算投影的点云密度,将密度较大的点作为地面点;根据与零高度线的距离确定非模糊地面点;提取地面点的最低点作为地面最低高度的估计hmin。
(3) 构建高程采样中心线性函数。设SAR影像斜距方向的坐标索引为i(i=1,2,...,I),I为斜距向像素数;方位向上的坐标索引为j(j=1,2,...,J),J为方位向像素数;近端斜距为rnear,距离向采样间隔为ρr。选择SAR影像中某一像素点作为零高程参考像素,参考像元的坐标为(iref,jref),参考点的斜距为rref,高程位置s与高度h的对应关系为
场景中最大的建筑的高度值为hmax,再利用式(11)转换成高程值,将其设置为高程向搜索范围上边界。场景中地面最低高度为hmin,也可以转换成高程值并设置为高程向搜索范围下边界。根据高程向搜索范围上下边界构建线性函数,要求与上下边界等间距,斜率为cotθ。将线性函数上的点作为每个像素的高程采样中心,于是每个像素的高程采样中心为
(4) 计算搜索半径并设置各像素的高程搜索范围。高程向搜索范围的搜索半径为
其中,∆h=hmax-hmin为高度差。因此可以根据每个像素的坐标索引自适应地确定高程向搜索范围:
(5) 高程反演。最后,利用CS算法逐像素在高程搜索范围内反演散射剖面,在高程反演结果提取最高的M个峰值(M为像素内叠掩散射体个数)。最后还原散射体的三维信息,得到三维点云。
该方法的流程图如图5所示。
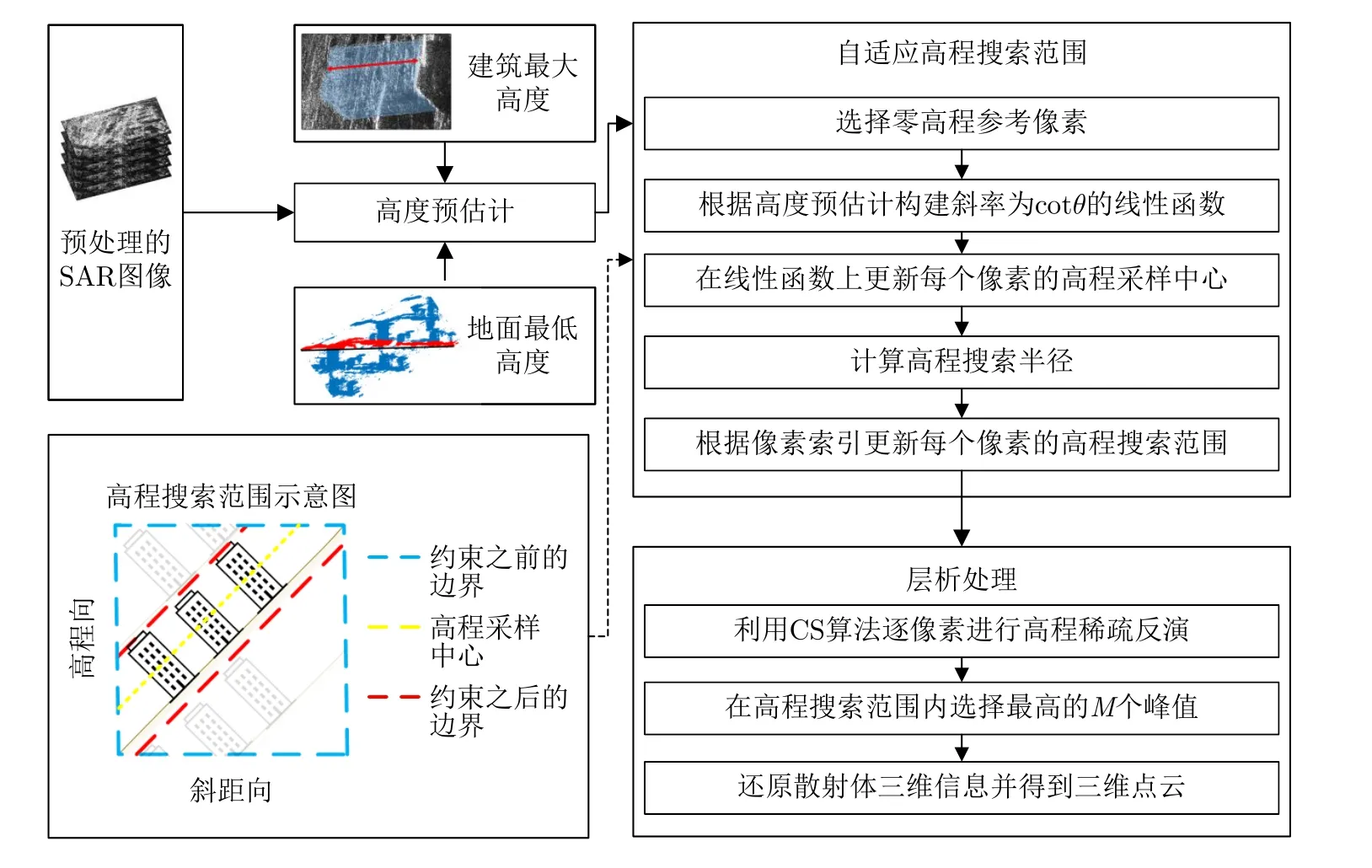
图5 自适应高程搜索范围方法流程图Fig.5 The flowchart of adaptive elevation search range method (blue: The boundary before constraints;red: Boundaries after constraints;yellow: Elevation sampling center)
5 实测数据验证与分析
5.1 机载阵列SAR数据
首先采用中国科学院空天信息创新研究院在《雷达学报》发布的峨眉机载阵列SAR数据集[17]进行验证,该数据集的相关参数如表3所示,Google Earth光学图和SAR幅度图如图6所示。数据集由11景SAR影像组成,空间基线均匀分布。按照参数计算得到理论高程瑞利分辨率为18.7 m,高程模糊间隔为189.4 m,则高度上的模糊间隔为99.2 m。场景高度分布在[–22 m,65 m],场景高度差约为87 m,场景高度差接近高度向上的模糊间隔,由此引起的高程模糊可能会影响三维成像结果。
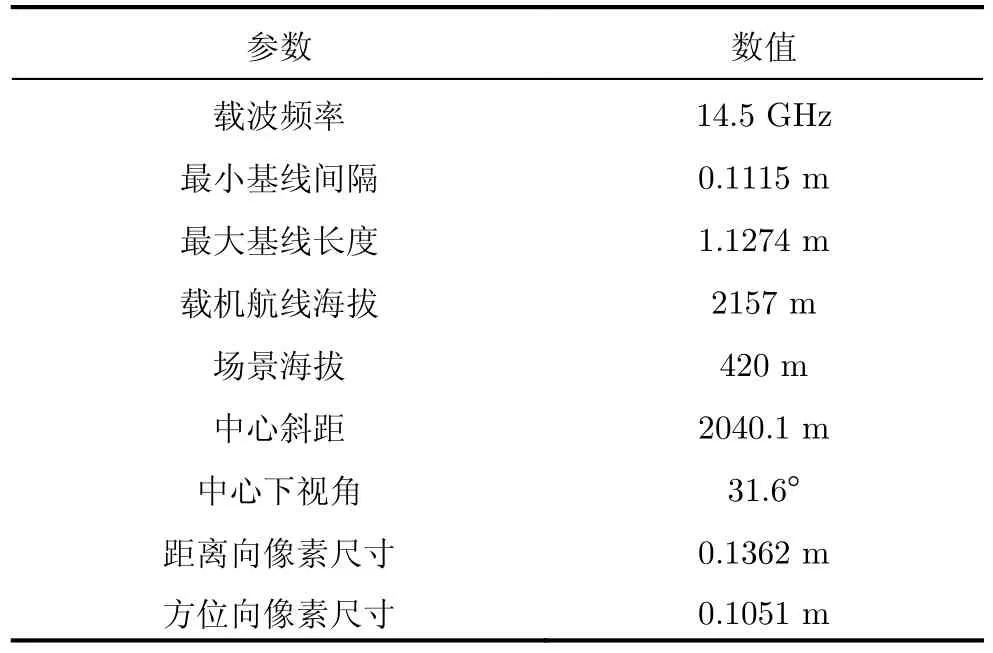
表3 峨眉数据参数Tab.3 Parameters of Emei data
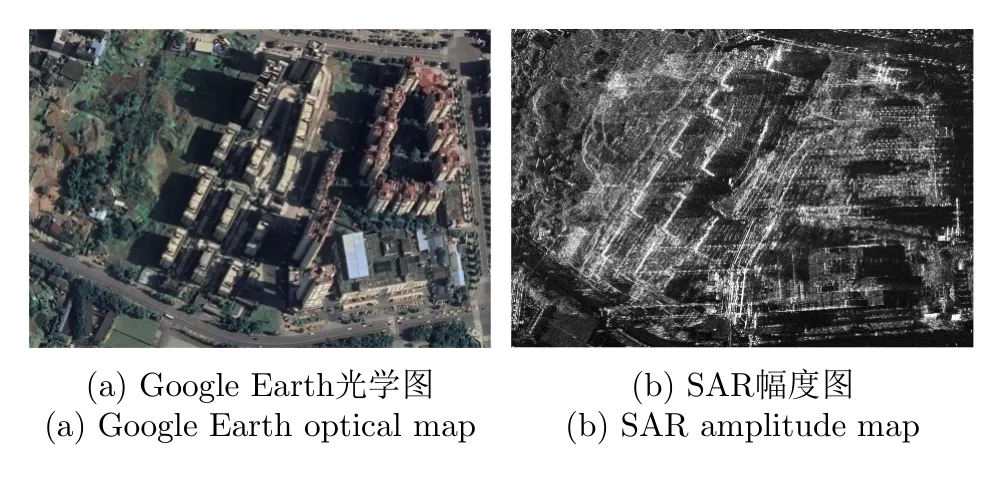
图6 峨眉区域的Google Earth光学图和SAR幅度图Fig.6 Google Earth optical map and SAR amplitude map of Emei area
图7(a)为未进行高程搜索范围自适应约束的三维成像结果。因为高程搜索范围超过了高程模糊间隔,该三维点云存在高程模糊,部分散射体的高程向位置被错误估计,不同高度层出现相似的建筑点云。图7(b)为采用自适应调整高程搜索范围方法的三维成像结果,高程搜索范围的大致边界如图7(a)红色虚线所示。在每个像元的散射体个数M已知的情况下,首先选择高程散射剖面中最高的M个峰值。然后在采样中心与搜索半径的约束下,每个像素的高程搜索范围被约束到一个更合适的区间。最后通过高程反演和三维信息还原得到了解模糊的三维点云。本方法既保证了真实点云的正常显示,也完成了高程模糊的大部分滤除。图7(c)为将斜距-方位-高程坐标系转换为地距-方位-高度坐标系的结果,图7(d)为峨眉数据全部区域的三维点云结果。峨眉数据的三维成像结果显示最高建筑的高度约为65 m,与前期研究[32]和高度预估计相符,建筑结构清晰,高程模糊现象被大幅度改善。
为了进一步分析高程模糊的影响以及本文方法在高程解模糊上的效果,实验中取SAR图像两条沿斜距向的剖线进行分析,并标号为剖线1和剖线2,如图8(a)所示。图8(b)为所选剖线在光学图中的大致位置。剖线1包含有一个建筑物的散射体,而剖线2包含有多个建筑物的散射体。图8(c)和图8(d)分别为所选剖线1和所选剖线2的归一化高程向散射强度谱,可以看到图中存在结构相似的高亮区域分布在不同的分层。其中红色椭圆内的区域是真实散射体的散射强度谱,而其他高亮区域代表高程模糊。在某些斜距向像素中,高程模糊的散射强度甚至高于真实散射体的散射强度,易造成散射体高程向位置的错误估计。例如在图8(d)中,上下两个绿色圆框分别位于模糊散射体位置和真实散射体位置,上方的绿色圆框内的散射强度明显高于下方的绿色圆框内的散射强度。取图8(c)中的红色箭头位置处对应的单个像素,得到该像素处高程剖面图如图8(e)和图8(f)所示。其中蓝色曲线为该像素的高程向散射强度谱,散射强度谱的峰值位置可以大概反映散射体的实际位置和高程模糊的位置。红色曲线是基于CS算法的高程稀疏反演。图8(e)是未采用自适应高程范围约束的高程反演结果,根据图8(c)可以确定该像素的真实散射体的大概位置和高程模糊的位置,并在图8(e)中标注出。图8(e)中左侧高程模糊的散射强度甚至高于真实散射体的散射强度,且该像素的CS高程反演也错误估计了真实散射体位置。图8(f)为采用本文方法进行高程向搜索范围约束后的高程反演结果,其中黑色虚线为该像素的高程向搜索范围的边界。可以看到,CS反演的估计结果正确地反映了真实散射体的位置。

图8 峨眉数据的散射剖面反演结果Fig.8 Inversion results of scattering profile from Emei data
为了评估本文方法对高程模糊的改善,参考邻域均值这一概念,提出“平均邻域高度差”这一定义来衡量三维点云在高度向上的集中度和连续性。平均邻域高度差被定义如下:
其中,MS为估计的散射体总数,h(i,j)为像素(i,j)中所有叠掩散射体的高度之和,h(i,j,m)为对应像素(i,j)中第m个散射体的高度,M(i,j)为对应像素(i,j)中叠掩散射体的数目,MN(i,j)为对应像素(i,j)相邻像素的叠掩散射体数目。平均邻域高度差∆hE可以概括为相邻像素包含的散射体高度差的均值,数值越小表示三维点云在高度向上的集中度和连续性越好。表4列出未采用和采用自适应高程搜索范围的三维点云平均邻域高度差,可以看出本文方法较大地提高点云分布的集中度和连续性。点云在高度向上分布更集中,则高程模糊产生的相邻像素高度突变现象更少。

表4 峨眉数据的平均邻域高度差(m)Tab.4 ∆hE of Emei data (m)
为了进一步分析高度预估计对本文方法和三维点云的影响,本文还定义了“散射体完整度”来反映三维点云的完整性。散射体完整度定义如下:
其中,Mref为参考散射体数目。散射体完整度C为一定条件下得到的三维点云中散射体的数目占参考散射体数目的比值。散射体完整度数值越高表示三维点云的散射体数量越多,建筑结构展现得越完整。以1 m为高度网格,将高度预估计结果hmax和hmin附近的高度值分别作为本文方法中高程采样中心和搜索半径的参数,得到三维点云,并计算平均邻域高度差∆hE和散射体完整度C,结果如图9所示。图9(a)是场景最高建筑高度预估计结果hmax浮动时的变化,将hmax=70 m时的点云散射体数量作为参考散射体数量。当hmax小于65 m时,散射体完整度急剧下降;当hmax大于65 m时,散射体完整度几乎不变,但是平均邻域高度差上升,点云集中度和连续性变差。这表明了最高建筑高度预估计结果hmax=65 m的准确性。图9(b)是场景地面点最低高度预估计结果hmin浮动时的变化,将hmin=-27 m时的点云散射体数量作为参考散射体数量。当hmin大于–22 m时,平均邻域高度差缓慢下降,但是散射体完整度急剧下降;当hmax小于–22 m时,散射体完整度几乎不变,但是平均邻域高度差急剧上升。这表明了场景地面点最低高度预估计结果hmin=-22 m的准确性。
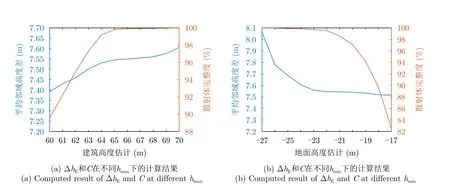
图9 不同高度估计下的平均邻域高度差和散射体完整度Fig.9 ∆hE and C at different height estimation
5.2 TerraSAR-X数据
本文同时采用高分辨率TerraSAR-X数据集进行验证。卫星轨道为升轨模式,工作模式为条带模式,数据以多航过方式获得。此数据集包含巴塞罗那城区23景高分辨率影像数据,该数据集的入射角、基线、斜距等具体参数详见表5,Google Earth光学图和SAR幅度图如图10所示。巴塞罗那数据的理论高程瑞利分辨率为39.1 m,最大不模糊高程为1207.4 m。在第3节中已说明星载多航过SAR虽然具有较大的高程模糊间隔,但高程散射剖面仍有许多旁瓣影响成像效果,低信噪比造成的伪影现象仍然不能忽视,如3.2节中仿真所示,在对巴塞罗那数据进行三维成像时也有必要采用自适应高程搜索范围方法。
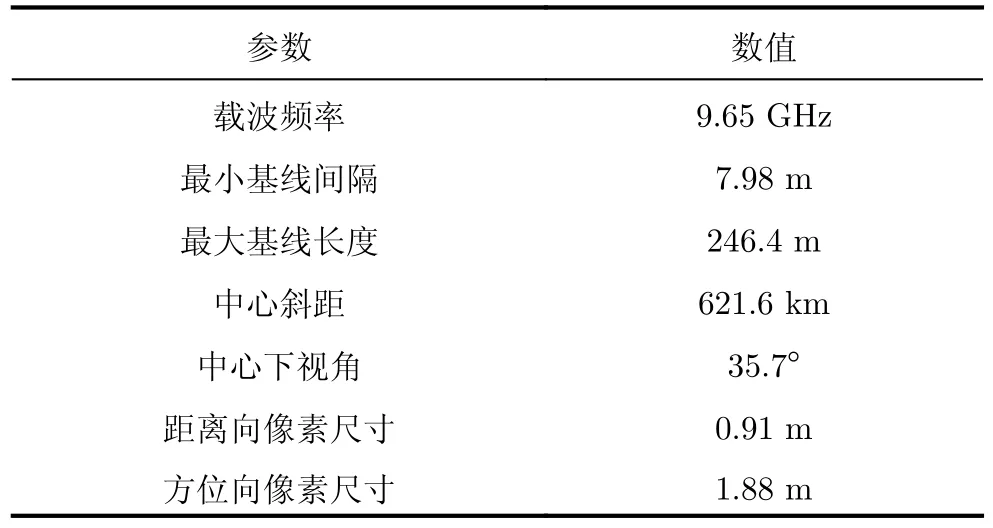
表5 巴塞罗那数据参数Tab.5 Parameters of Barcelona data
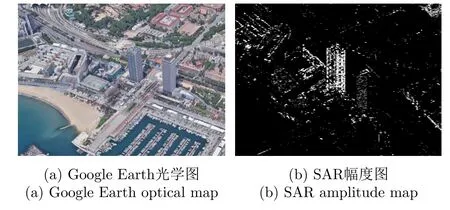
图10 巴塞罗那区域的Google Earth光学图和SAR幅度图Fig.10 Google Earth optical map and SAR amplitude map of Barcelona area
图11(a)为未进行自适应高程搜索范围约束的建筑三维重建结果,图11(b)为采用了自适应调整高程搜索范围方法的建筑三维重建结果。可以看到图11(a)中的较高区域和较低区域存在伪影(红圈内),而图11(b)中伪影点云被重建到了正确位置,验证了本文算法在星载多航过SAR数据层析成像中的适用性。
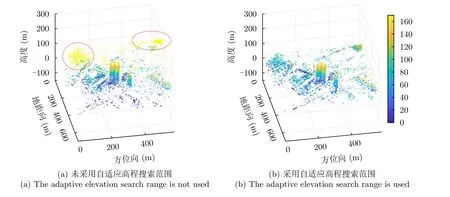
图11 巴塞罗那数据的三维重建结果Fig.11 3D reconstruction results of Barcelona data
选择图11(a)红圈内某一散射体所在的SAR影像像元,得到该像素高程向剖面如图12(a)所示,并将高程映射为高度。在图12(b)中,蓝色曲线为未采用自适应高程搜索范围的高度反演结果,所选像素的散射体位置被估计在高度215 m左右,但根据实际经验和光学图可以判断该高度被错误估计。红色曲线为采用本文自适应高程搜索范围的高度反演结果,黑色虚线为所选像素的高程搜索范围边界。可看到,所选像素的散射体位置被估计在高度50 m附近,Google Earth光学图显示所选像素的所在实际地理位置为中等高度建筑,根据实际经验可以判断该高度估计得到了改进。
进一步采用平均邻域高度差来定量判断本文方法在改善点云伪影方面的性能。表6列出未采用自适应高程搜索范围方法的三维点云结果和采用本文自适应高程搜索范围的三维点云结果的平均邻域高度差∆hE。本文方法得到的三维点云的∆hE更小,表明点云的伪影现象得到了改善。
6 结语
本文研究了TomoSAR中高程模糊现象产生的原因和特性,针对这一问题提出一种自适应调整高程搜索范围的方法。该方法结合场景的高度预估计,构建以零高程像元为参考的高程采样中心线性函数,从而实现每个像素的高程搜索中心自适应变化,并估计高程向搜索半径,以此得到根据每个像素索引自适应变化的高程向搜索范围约束,最后通过高程反演和三维信息还原得到场景三维点云。基于机载及星载实测数据的三维重建实验中,本文所提方法能够对机载平台飞行高度下的高程模糊问题进行改善,除此,该方法能改善星载平台下的伪影现象。通过定义的平均邻域高度差和散射体完整度指标,本文所提方法在TomoSAR三维点云重建中的性能得以验证,但对于更低高度的成像平台,本文方法的性能需进一步的讨论。
致谢感谢中国科学院空天信息创新研究院将机载阵列干涉SAR数据公开于雷达学报,促使了本文的研究。
