适用于野外环境的无线测发控系统设计与实现
2023-10-28王健康朱孟龙张临志尹蔚华
邹 凯,王健康,朱孟龙,李 恺,张临志,梁 君,张 翔,尹蔚华
(1. 中国运载火箭技术研究院,北京 100076;2. 中国航天空气动力技术研究院,北京 100074;3. 重庆航天火箭电子技术有限公司,重庆 400039)
0 引言
目前,目标飞行器的需求量正在逐渐增加[1-4]。根据任务需求,本文中飞行器的发射地点需要选取在戈壁滩或沙漠腹地的公路旁,此类地点缺乏对地面设备和人员的保障设施和防护掩体。在野外完成飞行器的部署后,发射时间需要协调,存在长期等候命令和收到命令后立即发射的情况[5]。此外,在飞行器发射后,需要实时监测其飞行状态,在异常时地面应立刻发送安控指令,实现飞行器的安控自毁[6-8]。因此,对测发控系统提出了设备部署时间短、发控距离远、待命时间长和具备安控指令远距离上行能力的要求。
有线测发控系统包括位于飞行器附近的前端设备和位于防护掩体的后端设备[9-11]。前端设备与飞行器通过数十米长的脐带电缆连接,采用RS-422、CAN[12]、1553B[13-14]或Flexray[15]总线等有线方式通信,前端设备与后端设备之间通过光纤进行远距离有线通信,试验人员操作后端设备实现飞行器的发控。在飞行器发动机点火时,为防止前端设备受到高温尾焰的烧蚀和碎片的冲击而损坏,通常采用钢甲房防护。因此,有线测发控系统设备部署耗时较长,发控距离受光纤长度限制,脐带电缆因发动机火焰烧蚀而损坏,增加发射成本和二次发射的准备时间。此外,在飞行器发射后,有线测发控系统无法发送安控指令,需要配置额外的安控数据链实现安控功能[6]。因此,针对本文中飞行器的需求,有线测发控系统并非最优选择,需要利用无线测发控系统远距离通信的优势以满足任务需求[16]。
1 无线测发控系统设计
1.1 需求分析
野外发射任务对测发控系统提出了如下要求:
1)地面设备便于携带和部署,对野外恶劣环境具备一定程度的防护能力;
2)由于野外无人员防护掩体,为保障人员安全,后端操作人员和设备需要距离飞行器发射点1 km以上;
3)在飞行器上电自检完成后,需要具备8小时以内的无人值守待命能力,收到发射命令后需要在10 min内完成发射;
4)地面能够实时监测飞行器的飞行状态,在发生故障或超出限制区域时立刻发送安控指令,使飞行器安控自毁。
常规有线/无线测发控系统前端设备具备对飞行器地面供电、火工品和发动机点火回路保护/解保/点火控制与器载设备状态测量等功能。前端设备在运输、部署、自检和器地间接口测试过程中会消耗大量的人力和时间。
随着无线通信技术传输速率、稳定性、可靠性、安全性与抗干扰能力的不断提升,已经可以满足作为测发控指令上行通信的要求,如Zigbee[17]、5G[18]、直接序列扩频通信(DSSS)[19-21]等通信体制,使用具有抗干扰与加密功能的无线通信链路替代器地之间的有线测发控通信链路,可以降低地面设备的复杂程度,实现器地无缆化,减少测试项目,提高野外恶劣环境下设备的可靠性。同时,无线通信链路兼具安控指令的上行能力,实现测发控与安控上行无线链路一体化设计,无需单独配置安控数据链路。
在常用的测发控无线通信体制中,Zigbee通信距离较短[17],难以满足远距离测发控和安控指令上行的要求;5G通信通常需要在发射场架设基站[18],在野外环境很难实现;基于直接序列扩频(DSSS)的脉冲编码调制(PCM)通信具有抗干扰能力强、通信距离远、无需依赖基站的优点,适合作为野外无线测发控系统的通信链路。
飞行器常规安控通信链路主要包括传统的脉冲编码直接序列扩频载波相位调制体制(PCM-DSSS-BPSK或PCM-DSSS-DPSK)和较新的多音组合编码调频体制(主字母调频High-Alpha-FM),目前应用较广泛的体制为PCM-DSSS-BPSK。为保证无线测发控系统上行通信链路与现有安控设备兼容,选用L频段PCM-DSSS-BPSK通信体制,频率范围与常规安控通信链路相同,用于传输测发控和安控指令,因此可适配大多数地面安控设备。下行链路沿用火箭遥测常用的S频段PCM-FM通信体制,作为遥测数据下行链路,以减少对器载遥测设备的改动,保证与现有测控站及遥测车的兼容性。
1.2 系统设计
为减少地面设备在野外环境的部署时间和难度,无线测发控系统采用器地一体化设计方式,将前端设备的功能集成于器载设备,取消器地间脐带电缆,后端设备直接通过无线链路实现与飞行器通信以执行测发控任务,从而减少地面设备数量,节省部署和测试时间。因此,测发控系统包括位于后端安全区的地面设备和飞行器器载设备两部分,通过无线链路进行通信。在发射准备阶段与飞行阶段,地面设备通过遥控链路向器载设备分别发送测发控指令与安控指令,器载设备通过遥测链路向地面设备发送指令回令和飞行器遥测数据。
为实现飞行器在发射场的长时间休眠,对器载配电与遥测设备进行改进,加入休眠管制销与火工品管制器,使飞行器具备遥控上电/断电、低功耗休眠、火工品和发动机点火回路保护/解保/点火控制以及器载设备状态测量等功能,实现无线测发控功能闭环。为便于总测和发射场故障排查时使用地面电源为飞行器供电和接收有线遥测数据,飞行器预留地面供电输入及有线遥测输出接口。无线测发控系统组成如图1所示。
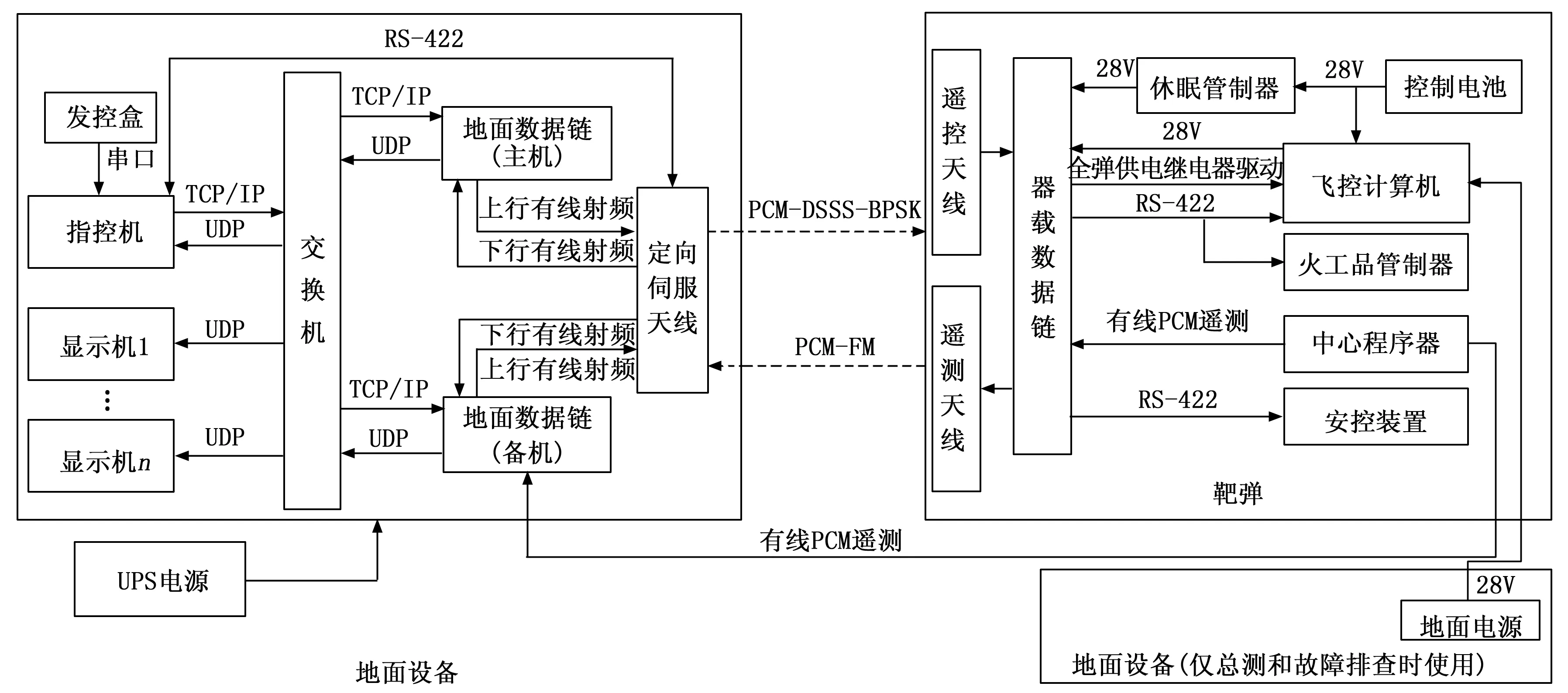
图1 无线测发控系统组成与连接关系
发控盒用于存储危险指令,包括火工品和发动机点火回路保护/解保/控制等指令,通过串口向指控机发送,经指控机二次确认后才可上行转发。指控机存储常规指令,包括诸元数据、惯导对准、存储器擦除与启动记录等。
地面数据链作为地面设备的核心,采用主备机热备份方式。指控机按照IP地址使用TCP/IP网络协议通过交换机将数据和指令发送至地面数据链主机或备机。地面数据链对指令进行编码、扩频、调制与功率放大后,变为PCM-DSSS-BPSK体制射频信号,发送至定向伺服天线。为避免地面数据链主/备机遥控射频信号相互干扰,在不发送遥控指令时,遥控射频链路处于关闭状态。指控机通过IP地址选择一台地面数据链发送遥控指令,收到指令的地面数据链开启遥控射频链路,在与飞行器建立无线链路连接后发送指令,随后将链路关闭。
定向伺服天线接收飞行器的遥测射频信号并进行功率放大后,发送至地面数据链的主机和备机,主机和备机同时对射频信号进行解调与解码后,使用UDP组播网络协议通过不同的组播地址经过交换机向指控机与显示机发送数据原码。指控机与显示机可根据组播地址选择遥测数据源,并在本地实时解析后显示飞行器的各项遥测参数,同时进行本地存储。在飞行器飞行过程中,指控机解析遥测数据获取飞行器的实时位置,经解算得到定向伺服天线的方位角和俯仰角指向,通过RS-422接口将指向数据发送至伺服平台,从而带动天线转动跟随飞行器,以保持最高的收发通信增益。
控制电池采用锂电池,经过休眠管制器为器载数据链提供休眠供电,同时直接为飞控计算机供电,通过插入和拔出休眠管制器的休眠管制销可以控制器载数据链休眠供电的通断状态;器载数据链通过遥控天线接收遥控射频信号,经过功率放大、解调、解扩与解码后,通过RS-422接口发送至安控装置、飞控计算机与火工品管制器,同时根据遥控指令,驱动飞控计算机内部控制电池并网继电器(以下简称“电池并网继电器”)的通断状态,进而由飞控计算机向全器配电。器载数据链接收中心程序器发送的有线PCM遥测数据,经组帧、调制与功率放大后变为遥测射频信号,由遥测天线对外发送。器载数据链具有休眠与唤醒两种状态:在休眠状态下,仅从遥控链路接收指令,不发送遥测数据,运行功耗极低;在唤醒状态下,接收遥控指令,同时通过遥测链路发送数据,全功率运行。
1.3 测发控流程设计
当飞行器通过发射架起竖前处于断电状态,在起竖后,操作人员拔出休眠管制销后,器载数据链的休眠供电支路接通,器载数据链上电并进入低功耗休眠状态,此时操作人员可以撤离。
地面设备部署完成后,开始飞行器上电自检,地面设备发送指令唤醒器载数据链,此时器载数据链开始发送遥测信号,随后发送指令使器载数据链驱动电池并网继电器接通,此时飞控计算机上电并使电池并网继电器自锁,开始向其他器载设备配电,进入飞行器的自检流程。自检完成后,地面设备连续发送指令,由器载数据链转发至飞控计算机,使电池并网继电器的自锁功能失效,随后驱动电池并网继电器断开,此时除器载数据链外其他器载设备断电。接下来地面设备发送指令使器载数据链进入低功耗休眠状态,器载数据链只接收唤醒指令,不发送遥测信号,功耗仅为50 mW,此时飞行器进入休眠状态,可长时间等待发射命令。若控制电池按照电压32 V,容量25 Ah设计,器载数据链在休眠状态下8 h仅耗电0.012 5 Ah,剩余电量仍然可以满足飞行器发射与飞行需求。
在收到发射命令后,飞行器首先按照与自检相同的流程上电,随后地面设备发送指令,由器载数据链转发至火工品管制器,使飞行器火工品与发动机点火回路解保;接下来发送一系列测发控指令,由器载数据链转发至飞控计算机,从而完成飞行器发射流程。
在飞行过程中,若出现异常情况,地面设备发送安控指令,器载数据链收到指令后驱动安控装置执行自毁,同时通过RS-422接口转发至飞控计算机。
在发射阶段,若需要终止发射流程,可先发送指令使飞行器火工品与发动机点火回路进入保护状态,随后按照自检完成后相同的指令发送流程使飞行器进入休眠状态,随后由操作人员插入休眠管制销,使器载数据链断电,实现全器断电。
2 无线通信链路设计
在野外发射场景下,由于没有防护掩体,试验人员与飞行器之间需要更远的安全距离,以保证发射时的人员安全。根据本文中飞行器的设计要求,在无线链路通视无遮挡时,需要保证不低于1 km的测发控通信距离和不低于80 km的安控指令上行距离。针对此需求,分别对遥控链路和遥测链路的性能指标进行设计。
根据无线通信距离计算公式,上行链路通信应满足式(1):
Pr1≤Pt1+Gt1-LFS1+Gr1-R
(1)
根据现有设备的性能,Pr1为器载数据链的接收灵敏度,在码速率20 kbps,误码率低于1×10-6时,优于-117 dBm;Pt1为地面数据链发射功率,本文设计采用2 W功放;Gt1为定向伺服天线增益,波束角15°内不低于14 dB;Gr1为遥控天线增益,波束角170°内不低于-6 dB;R为信道余量,根据经验选取6 dB,LFS为空间自由损耗,计算参照公式(2):
LFS1=32.44+20lgd1+20lgf1
(2)
其中:d1为遥控链路通信距离,单位为km,f1为L频段遥控射频载波频率,对公式(1)与公式(2)进行整理,得到:
20lgd1≤Pt1+Gt1-32.44-20lgf1+Gr1-Pr1-R
(3)
经过计算得到,上行遥控链路通信距离最长为100 km,满足测发控通信距离不短于1 km和安控指令上行距离不短于80 km的要求。在飞行器飞行过程中,通过多站接力可实现飞行全程安控指令的上行发送。
参照式(3),下行遥测链路的通信距离d2可通过式(4)计算:
20lgd2≤Pt2+Gt2-32.44-20lgf2+Gr2-Pr2-R
(4)
根据现有设备的性能,Pr2为地面数据链的接收灵敏度,在码速率5 Mbps,误码率低于1×10-4时,优于-124 dBm;Pt2为器载数据链发射功率,本文设计采用5 W功放;Gt2为遥测天线增益,波束角130°内不低于14 dB;Gr2为定向伺服天线增益,波束角15°内不低于15 dB;f2为S频段通用遥测射频载波频率。
经过计算得到,下行链路通信距离最长为200 km,满足测发控通信距离不短于1 km的要求。
最后,通过拉距试验,验证了计算的通信距离与实际通信距离一致,满足设计要求。试验场景如图2所示。

图2 拉距试验场景
3 器载数据链设计
器载数据链作为飞行器与地面设备上行遥控指令和下行遥测数据通信处理的重要载体,是无线测发控系统的核心设备。为实现飞行器上电自检后的长时间休眠,器载数据链需要具备低功耗休眠功能,并在唤醒后能够控制全器设备上电。由于现有器载遥测设备不具备此功能,需要针对需求进行设计。本文设计的器载数据链的内部组成与连接关系如图3所示。
当控制电池通过休眠供电支路为器载数据链提供休眠供电时,休眠/唤醒模块中的低功率二次电源向带通滤波器、载波检测芯片与控制芯片供电,高功率二次电源模块不对外供电。因此,除休眠/唤醒模块外,其他模块断电,器载数据链的处于“休眠”状态。由于低功率二次电源、载波检测芯片与控制芯片均选用低功耗元器件,休眠/唤醒模块的休眠功耗维持在50 mW以内。此时,器载数据链通过遥控天线接收射频信号,经过带通滤波器滤波后选择遥控射频信号频带内的信号发送至载波检测芯片,进而将信号强度转换为电压模拟量,发送至控制芯片,由控制芯片采集并判断信号强:
1)当信号强度超过设定的阈值时,控制芯片向高功率二次电源模块发送的供电控制指令变为“有效”状态,高功率二次电源模块开始向功放滤波模块、上下变频模块、基带模块、处理器模块、继电器驱动模块和安控指令模块供电,器载数据链被唤醒,处理器模块将器载数据链自身的遥测数据,经过基带模块、上下变频模块和功放滤波模块的编码、调制和功率放大后,转换为射频信号,通过遥测天线发送;对遥控天线接收的射频信号,经过功放滤波模块、上下变频模块和基带模块的功率放大、解调、解扩和解码后,发送至处理器模块进行指令识别,当识别到“唤醒”指令时,处理器模块向高功率二次电源模块发送的供电保持指令变为“有效”状态并维持,使高功率二次电源模块保持供电输出状态,器载数据链将保持“唤醒”状态;
2)若接收到的射频信号是与遥控射频信号频带内的干扰信号或是其他的遥控指令,则供电保持指令保持“无效”状态,控制芯片设定在收到遥控射频信号频带内信号的强度低于阈值10 s后,供电控制指令变为“无效”状态,此时高功率二次电源模块停止供电输出,器载数据链恢复“休眠”状态。
器载数据链唤醒后,当收到飞行器上电指令时,处理器模块通过继电器驱动模块驱动电池并网继电器闭合,实现全器上电,此时飞控计算机向器载数据链供电。中心程序器上电后开始向器载数据链发送有线PCM数据,经过接口模块的电平转换后由处理器模块接收,并将有线PCM数据与自身遥测数据进行组帧,经过处理后,通过遥测天线发送。处理器模块将收到的测发控指令通过接口模块由RS-422接口转发至飞控计算机和火工品管制器,当收到安控指令时,对指令内容进行校验后,安控指令模块使用RS-422接口向安控装置发送安控指令,实现飞行器自毁,同时还会将安控指令转发至飞控计算机。
在器载数据链收到飞行器断电指令后,处理器模块通过继电器驱动模块驱动电池并网继电器断开,此时飞控计算机不再向器载数据链供电。收到“休眠”指令时,处理器模块将供电保持指令变为“无效”状态,待休眠/唤醒模块中控制芯片收到遥控频带内射频信号的强度低于阈值10 s后,供电控制指令变为“无效”状态,此时高功率二次电源模块停止供电输出,器载数据链进入“休眠”状态,直至休眠供电支路不再供电时,器载数据链断电。
4 地面数据链设计
4.1 防护结构设计
为适应野外的恶劣环境,地面数据链在工作过程中需要具备防风、沙、微量降雨和耐高温防等环境防护能力,同时兼具部署迅速的特点。根据使用的环境条件,地面数据链采用设备与包装箱一体化设计方式,具备部署迅速的优点,如图4所示。

图4 地面数据链实物
针对防护需求,包装箱采用抗老化的改性PP材料通过注塑工艺成型,在顶盖闭合状态下具备抗重压、防水与防撞击等特性,达到IP67防护等级。上位机选用加固计算机,具备IP53防护等级,通过卡扣固定在接口面板上,方便快速拆卸和安装。电源转换模块、蓄电池、数据链模块与功放模块经过三防加固后,通过减振支架固定在包装箱内。电源开关、加解密接口、有线遥测接口和射频接口的电连接器布置在接口面板上,均选用具有三防特性的加固产品。接口面板与包装箱之间的缝隙通过密封条密封,防止沙尘或雨水在顶盖开启的状态下进入包装箱内。散热风扇和充电模块安装于接口面板背部,接口面板预留通风口,可通过风扇主动散热,以便在野外的高温环境中使用。
在沙尘或小雨环境中使用时,可断开外部电源,使用地面数据链自带的蓄电池供电,并将包装箱的顶盖打开约20°,防止沙尘或雨水通过通风口进入包装箱,如图5所示。
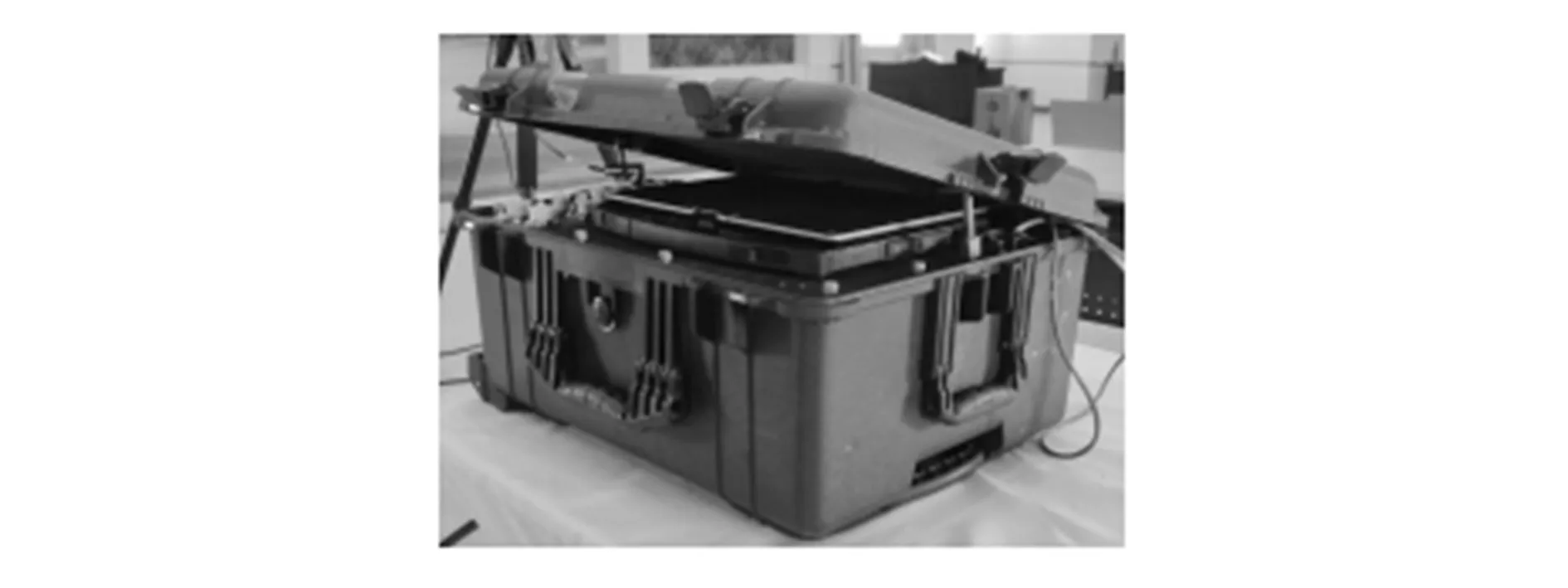
图5 地面数据链防护运行状态
4.2 功能设计
地面数据链组成与连接关系如图6所示。充电模块通过外接220 V交流电源为包装箱内部的蓄电池充电,在充电和使用过程中可显示蓄电池的剩余电量。电源转换模块可分别使用外部220 V交流、直流电源和包装箱内的蓄电池作为供电输入,为数据链模块、功放模块、上位机与风扇供电,供电输入的通断状态通过接口面板的电源开关控制。数据链模块通过网络接口与上位机通信,通过射频接口和控制接口与功放模块连接,并将加解密接口及有线遥测接口通过电缆引出至接口面板的电连接器。上位机向数据链模块发送配置参数,并接收数据链模块的参数反馈。数据链模块通过控制接口控制功放模块的开关状态。
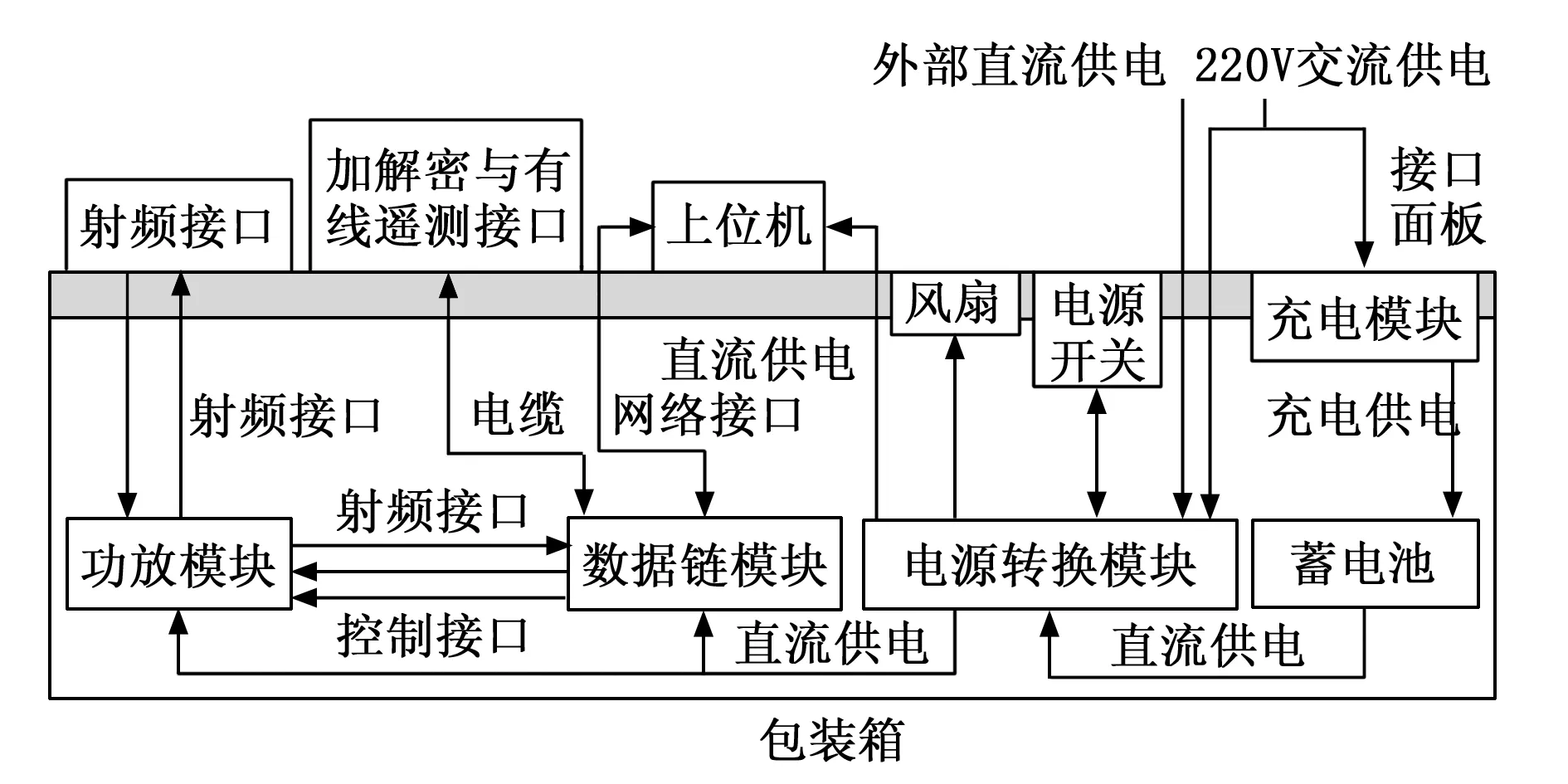
图6 地面数据链组成与连接关系
在发送上行遥控指令时,上位机通过网络接口收到指控机发送的遥控指令后,转发至数据链模块,经过编码、扩频和调制后,发送至功放模块进行功率放大后输出。
在收到遥测信号后,数据链模块进行解调和解码,并将处理后的遥测数据发送至上位机,由上位机通过网络接口实现数据组播发送。数据链模块也可通过有线遥测接口接收有线遥测数据并转发至上位机。若遥测数据被加密,数据链模块可以通过加解密接口与外部的加解密机通信,实现数据解密。
5 火工品管制与测量设计
5.1 火工品管制设计
在本文设计的无线测发控系统中,使用火工品管制器负责器上火工品的短路保护。为增加飞行器在装配、测试与运输过程中火工品保护的可靠性,设置多级火工品管制措施,防止由于单级管制故障或地面误发火工品发火指令,造成火工品误发火。器载火工品管制设备的连接关系如图7所示。

图7 器载火工品管制与发火设备连接关系
火工品电源由器载控制电池供电,从供电至火工品发火支路经过3级管控。由于发动机误点火将引起重大安全事故,发动机点火支路增加1级管控,采用4级管制,管制层级关系如下:
1)控制电池向飞控计算机提供火工品供电,飞控计算机通过RS-422接口接收器载数据链的遥控指令,通过电磁继电器对自身火工品供电正母线和负母线进行通断控制,在飞行器装配、测试与运输过程中,正负母线均断开;在进入火工品测试和发射流程时,正负母线接通;
2)飞控计算机根据接收的遥控指令或飞行控制时序,对各火工品发火支路进行单独控制,以按需实现点火等动作;
3)火工品管制器通过RS-422接口接收器载数据链的指令,实现各火工品支路的短路保护与解除保护状态切换,在短路保护时,将火工品供电输入的正极与负极短接,防止静电或非期望供电造成火工品误发火;在解除保护时,将火工品的正极与火工品发火供电支路的正极接通,可按需进行火工品发火;
4)在火工品管制器的发动机点火支路增加了发动机安全销,对发动机点火头进行短路保护,由火工品管制器控制发动机安全销的保护状态,在短路保护时,发动机安全销将发动机点火头的正极与负极短接,防止发动机误点火;在解除保护时,发动机安全销将发动机点火头的正极与发动机点火支路的正极接通,实现发动机点火。
5.2 测量设计
为实现器载设备状态的实时监测,在飞控计算机中设置测量电路,对控制电池输出电压、火工品母线输出电压以及火工品发火支路的供电状态进行测量。在火工品管制器中设置测量电路,对发动机安全销的短路保护状态进行测量。
中心程序器负责接收测量数据并进行编码,发送至器载数据链,继而通过遥测信号发送至地面设备进行监测。
6 试验结果与分析
通过飞行器的飞行试验,对本文设计的无线测发控系统进行了验证。
6.1 飞行试验测发控流程
飞行试验的测发控流程如下:
1)飞行器在发射阵地通过发射架起竖后,拔下休眠管制销,使飞行器由断电状态进入休眠状态;
2)在距离飞行器1.5 km远的操作场地布置地面设备,并将定向伺服天线对准飞行器;
3)通过地面设备发送指令使飞行器唤醒,开始上电自检流程;
4)在自检完成后,地面设备发送指令使飞行器休眠,随后等待发射命令;
5)在收到发射命令后,地面设备发送指令使飞行器唤醒,随后完成发射流程;
6)在飞行过程中,指控机根据地面数据链接收的遥测数据实时解析出飞行器的位置,并驱动定向伺服天线指向飞行器,若飞行状态出现异常,则立刻发送安控指令。
6.2 飞行试验结果分析
在飞行试验飞行器自检和发射流程中,测发控指令执行全部正常,未出现指令无响应情况;自检和发射流程之间的低功耗休眠时间约35 min。由于飞行器全程飞行正常,因此未验证安控指令上行功能。在飞行器发射后,定向伺服天线持续跟踪飞行器,直至飞行器飞行距离增加导致遥测信号误码率提高,指控计算机无法解析飞行器的实时位置时切换为根据预装飞行轨迹程控跟踪。
通过统计发射前遥测数据误码率,验证遥测数据接收正常。下行遥测数据误码率统计如表1所示。

表1 下行遥测数据误码率统计
通过在下行遥测数据中回传上行遥控指令并加入校验,能够准确获取飞行器接收的上行遥控指令数据,并与地面存储的上行遥控指令数据对比,实现上行通信链路的误码率统计。在发射前,上行遥控指令全部正确传输,结合填充数据进行误码率统计如表2所示。

表2 上行遥控指令误码率统计
7 结束语
本文针对飞行器在野外发射的场景,设计了一种适用于野外部署的无线测发控系统,具有部署时间短、发控距离远、待命时间长和具备安控指令上行功能的特点,并完成了飞行器的飞行试验任务,测发控功能全部正常。但本文设计的无线测发控系统仍存在改进之处,如地面设备集成度较低,后续可将地面数据链与定向伺服天线进行一体化设计;地面设备中交换机通过网线与指控机和多台显示机连接并通信,铺设复杂,后续可替换为无线网络的通信形式。
该方案除应用于飞行器的野外发射场景外,也可应用于小型固体火箭飞行器的飞行试验,能够显著提高对于发射场的环境适应能力。
