内置式永磁同步电机恒流频比控制改进策略
2023-10-25张文远韩福强杨冬鹏张本轩
张文远, 韩福强, 苗 强, 杨冬鹏, 张本轩
(潍柴动力股份有限公司, 山东 潍坊 261061)
电机运行在中高速时,传统滑模观测法对转子位置的估测比较准确[1],观测器是基于三相永磁同步电机(PMSM)基波模型进行测算的,因此当电机在中低速时难以对转子位置进行精确地检测[2]。为克服滑模观测器在零低速不能有效估计转子位置的缺点,使PMSM能正常启动,需要使用其他的控制策略来启动电机[3]。现有PMSM启动方法有恒压频比(V/f) 控制、恒流频比(I/f) 控制等。与V/f控制相比,I/f控制通过转矩和功率角之间的自稳定来实现PMSM的稳定启动,通过调节电流可以有效防止电流过流,具有一定的抗干扰能力[4]。
1 传统I/f控制策略
I/f控制是一种根据转矩-转速特性,设置适当的电流-频率比以追求高运行效率的控制策略[5]。相比于V/f控制的全开环控制结构,I/f控制的电流闭环、速度开环结构,可以有效防止过流现象的发生[6]。
永磁同步电机的电磁转矩公式可写为
式中:Te——电磁转矩;Pn——磁极对数;iq、id——电机q轴电流、d轴电流;Ld、Lq——d轴电感、q轴电感;Ψf——永磁体磁链。
如图1所示,d、q轴为真实转子位置构建的两相旋转坐标系,d*、q*轴为由给定需求角速度积分得到的转子位置构建的两相旋转虚拟坐标系。在传统I/f控制过程中,给定q*轴参考电流iq*,d*轴参考电流id*=0,q*轴与q轴之间存在一个θL的夹角,当q*轴与q轴重合时θL=0°,当q*轴与d轴重合时θL=90°,实际电流id、iq是iq*在d、q轴上的投影[7]。
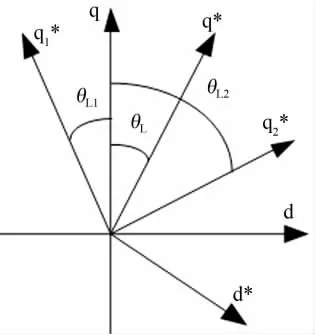
图1 I/f运行向量图
当Ld=Lq时,电磁转矩方程公式可以简化为:
通过预定位,使电机启动时d轴与虚拟q*轴重合,此时θL=90°。当θL在[0,90°]区间内变化,给定的需求转速大于实际转速时,由于负载的存在,实际转速不足以跟随需求转速,导致θL减小、Te增大,迫使转子加速运转;相反,当给定的需求转速小于实际转速时,θL增大、Te减小,当转矩小于负载后,转子转速下降。这个过程就是“转矩-功角自平衡”原理,通过这种动态调节能力,I/f控制可以实现动态转速控制。I/f运行向量如图1所示。
2 内置式永磁同步电机I/f控制策略
2.1 转矩-功角自平衡稳定区间
当Ld≠Lq时,电磁转矩方程公式为:
此时给定的iq*在d、q坐标系分配的电流id、iq对电磁转矩均存在作用,无法忽略简化。
对公式(3)两边θL求导可得:
令Te'=0可得:
对公式(5)进一步简化可求得:
式中:θL1——第一象限区域输出最大负转矩对应的角度极值点;θL2——第二象限区域最大转矩电流比(MTPA) 对应的角度极值点。
[θL2θL1]为转矩-功角自平衡稳定区间,分别将其代入电磁转矩公式(3)求得Temax、Temin,在iq*=35A、iq*=50A时按照公式(6)和公式(7)求出的θL1、θL2(图2),给定iq*大小不同,转矩-功角自平衡稳定区间不同,稳定时能够承载的负载范围也不同。
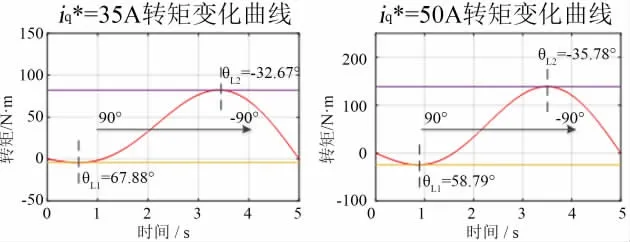
图2 电磁转矩随θL变化曲线
传统I/f控制策略在电机启动时使d轴与虚拟q*轴重合,即θL=90°,为防止电机在负转矩区域反向转动,负载不能低于|Temin|;转矩-功角自平衡为一个动态过程,当θL=θL2时,动态变化过程中容易出现θL<θL2造成失衡,需要预留一段空间,给定iq*能够承载的负载转矩范围为:
式中:TL——机械负载转矩;Temin、Temax——转矩-功角自平衡稳定区间内最大输出负转矩、最大输出正转矩。
2.2 I/f启动ωref界限分析
稳态工况下,PMSM的定子电压um为:
式中:um——定子电压;R——定子电阻;ωe——转子电角速度。
忽略定子电阻R上的压降,近似可以得到:
式中:ulim——定子电压极限值ulim。
当给定iq*,在转矩-功角自平衡稳定区间[θL2θL1]内,稳定时的转子电角速度ωe为:
根据定子电压极限值ulim,可得到在[θL2θL1]区间内存在的最大电角速度为ωemax,可以维持稳定状态的给定需求角速度ωref范围为:
2.3 转速斜率梯度
由于启动时转子实际转速是逐渐上升的,直接给定需求电角速度ωref,实际转速过低,容易导致θL减小、输出扭矩快速变大,迫使实际转速迅速增加,直至超过需求转速,使θL增大,在这个过程中转速会产生严重振荡,经历多次振荡以后逐渐达到平衡。严重时,当θL变化跨过平衡区域,则会导致失步运行。可以使ωref按照斜率梯度kω上升来避免需求电角速度过大造成的振荡,ωref与斜率梯度kω、时间t之间的关系式为:
根据机械运动方程可以得到斜率梯度kω为:
式中:J——转动惯量;α——加速度;ωm——转子机械角速度;ωe——转子电角速度;ωref——给定需求电角速度。
2.4 角度补偿法
传统I/f控制策略在θL=90°时启动,经过负转矩区后开始进入自平衡稳定区间;当负载过低时,容易产生较长时间的转速振荡,严重时甚至会造成反转失步。通过在I/f积分角度θIF基础上进行角度补偿,如图3所示,使q*轴与d轴夹角为θb进行启动,避免负转矩区间的影响,补偿后的I/f角度θIFB为:

图3 角度补偿法运行向量图
如2.3小节分析,负载过大时,在启动开始的一段时间内,需求转速不断按照梯度增加,而实际转速过低,容易造成转速振荡或失步,可以对I/f积分的角度θIF进一步补偿,使其在平衡角度附近10°范围内开始启动,补偿角度θb范围为:
式中:θTL——达到稳定时的平衡角度。
通过给定is*与给定角度φ启动可以实现等效角度补偿,如图3所示,实际电流id、iq是is*在d、q轴上的投影,通过设定夹角φ来实现快速稳定启动,当φ=0°时,等效于给定iq*不补偿角度,设定夹角φ的范围与补偿角度θb范围一致。
3 I/f启动控制策略仿真分析
本文基于Matlab/Simulink 仿真平台对改进的I/f启动进行仿真验证,电机仿真参数如表1所示。

表1 电机仿真参数
给定q*轴电流iq*=300A、负载TL=50N·m、斜率梯度kω=1×104,通过角度补偿法使启动时θL=56°,即θb=34°,如图4所示,在达到转速平衡的过程中产生了振荡,平衡时θL=18.7°,θTL=71.3°。

图4 θL=56°启动时转速和θL变化波形
对I/f积分角度进一步补偿,使启动时θL=10°,即θb=80°,启动时接近负载50N·m对应的“转矩-功角自平衡”点,如图5所示,转速变化更加平缓,最终平衡时角度相同,θL=18.7°。
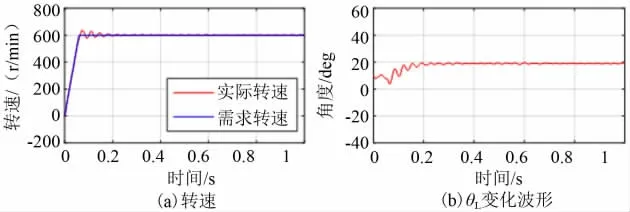
图5 θL=10°启动时转速和θL变化波形
4 结论
通过对内置式永磁同步电机I/f启动控制策略的分析,说明角度补偿法可以避免启动时产生负转矩,降低反转、失步风险,使需求电角速度与实际电角速度同步变化,转速过渡过程更加平滑。改进的I/f启动控制策略具有良好的性能和可靠性。