袋装材料自动化立体仓储系统的设计与实现
2023-10-20高灼均
高灼均
广州起重机械有限公司 广州 510405
0 引言
随着产能的不断提升,对于如何提高仓库的利用空间,减少货物在存储过程中可能会出现的信息差错,提高货物的转运效率等成为了企业迫切需要解决的问题。仓储的有效管理以及成本控制已经成为影响产品市场竞争力的关键因素。自动化立体仓储系统集成了计算机控制、网络信息、数据通信、物资信息自动识别等先进技术,可实现仓储收发作业机械化、管理数字化、存储单元立体化、信息传输网络化和安全监控可视化。本文以某化工企业自动化立体仓储项目为背景,探索研究自动化立体仓储的系统组成,实现了仓储管理的智能化。
1 系统概况
示例项目存储的物料为袋装原材料,储存所用容器为塑料托盘和木制托盘。货物单元每垛40 包,每包25 kg。立体仓库总高为20.68 m,存储层数为10 层,存储货位数5 736 货位,同时出入库效率为60 托/h,其中入库40 托/h,出库20 托/h。项目由货架系统、电气控制系统(以下简称ECS)、仓库管理系统(以下简称WMS)、设备调度系统(以下简称WCS)组成。设备类型包括堆垛机、穿梭车、输送机等。其中堆垛机数量3 台,穿梭车数量2 台,输送机、拆/码盘机、移栽机等设备数量65 台。按照区域划分为车间托盘货物输送区、立体仓储区、库前输送区和发货盘点区,总体布置如图1 所示。
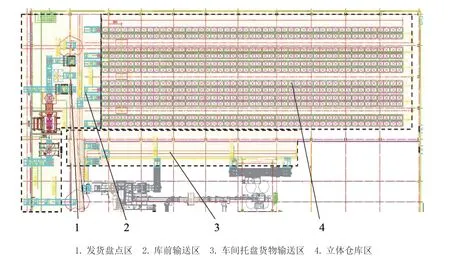
图1 总体布置图
2 系统工艺流程设计
自动化立体仓储系统由计算机系统进行监视和控制,计算机监控中心室设置在中控室。在出入库输送系统中需要确认货物信息的设备上配备固定式条码扫描仪,发货及异常处理工位配置手持式条码扫描仪。通过读取条码信息,自动完成产品信息的录入、入库指令生成等操作。操作人员也可通过手持条码扫描仪完成对货物信息的识别及相关信息录入等操作。
2.1 托盘货物入库流程
如图2 所示,操作人员将码垛完毕的托盘输送至入库输送机上,输送机运行带动托盘前进,安装在入货口的外形检测装置自动对输送机上的托盘货物进行检测。若外形检测不合格,系统发出报警提示信息,提示操作人员重新对托盘进行整理后再入库。外形检测合格的托盘,由系统分配存储库位并调配堆垛机将托盘存放到相应的存储位,完成入库操作。

图2 入库流程图
2.2 托盘货物出库流程
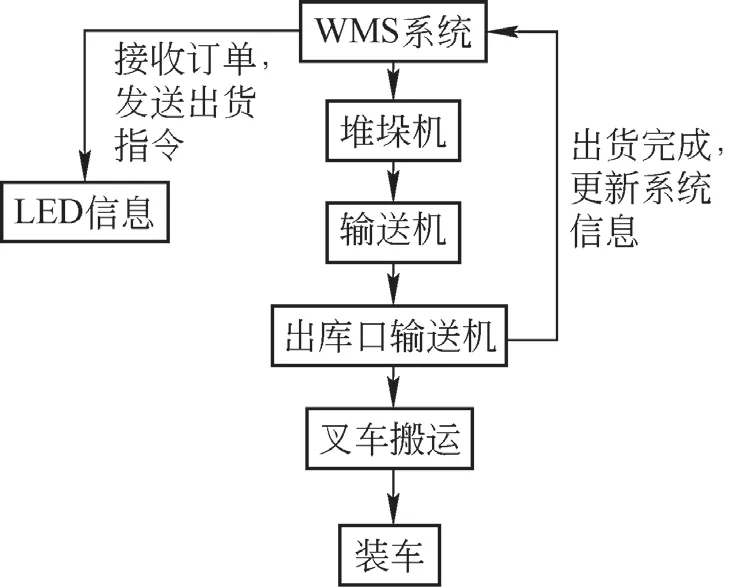
图3 出库流程图
2.3 空托盘回库流程
如图4 所示,实托盘经过托盘转换器,货物与塑料托盘进行分离并转换为使用木托盘进行承托,塑料托盘输送到码盘机进行码盘,码盘至9 层后通过穿梭车摆渡到对应巷道进行入库。

图4 空托盘回库流程图
2.4 空托盘出库流程
如图5 所示,WMS 接收生产线的需求信息,系统生成出库指令并调度堆垛机将货物取出后放到出库输送机上,通过输送线和穿梭车,将空托盘输送至生产线。

图5 空托盘出库流程图
2.5 盘点流程
如图6 所示,操作人员根据盘点需求,在WMS 中生成盘点指令,系统生成盘点指令并调度堆垛机将货物取出后放到交接口输送机上,货物最终被输送至盘点位置。
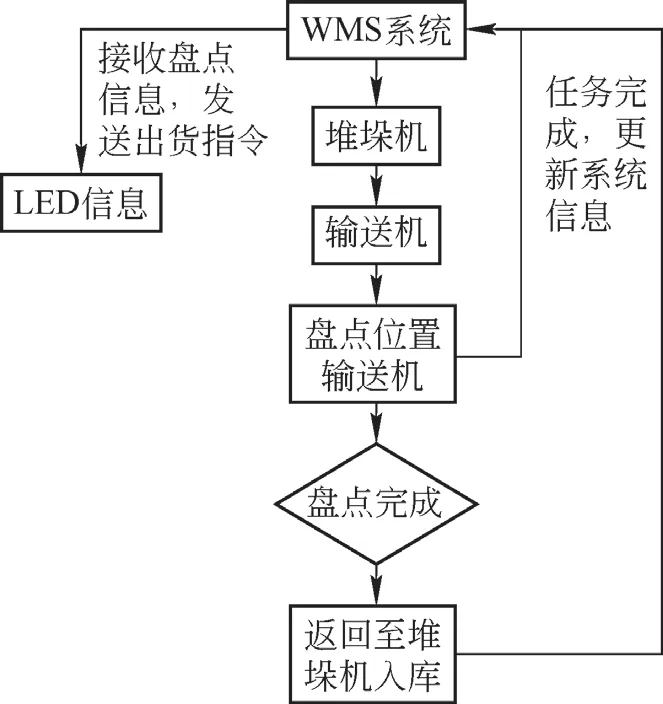
图6 盘点流程图
3 货架系统设计
3.1 货架参数简介
货架系统是自动化立体仓储的重要组成部分之一。自动化立体仓库货架主要有焊接式货架和组合式货架2种基本形式。本项目采用横梁式双货位组合货架,货架主要由货架片、横梁、上/下轨道、水平拉杆、垂直拉杆、吊梁、端部网架等构件组成。货架各构件在工厂制造,在现场组装并用螺栓联结紧固。货架外形尺寸为71.45 m×19.1 m×20.685 m(长×宽×高);货位数为12排×23.5 列×2 货位×10 层+96=5 736 货位;单元载重(含托盘)1 050 kg;抗震烈度为7 度,设计基本地震加速度值为0.10g。
3.2 主要构建
1)柱片 横梁式货架的柱片由立柱、横撑、斜撑用螺栓及防松螺母联结而成。立柱孔距为75 mm,横梁可以在货架全高范围内做间隔为75 mm的调整(见图7)。

图7 柱片示意图
2)横梁 采用双C 形梁嵌合而成,横梁采用挂件与立柱连接,并插入保险销来保证货架的安全性,具有优良的连接精度。
3)上/下轨道 上/下轨道是保证堆垛机运行平稳及可靠的重要保障,其型号主要根据堆垛机的自重、载重、运行速度等参数选定。本项目上轨道采用100 mm×100 mm×5 mm 的方轨,上轨道安装在货架吊梁上,采用螺栓连接。下轨道采用30 kg/m 的轻轨,安装在化学螺栓固定的轨道垫板上,为减少堆垛机运行的振动和噪音,下轨道和垫板之间垫有高强度橡胶。
F2=0.008X1-0.016X2-0.018X3+0.047X4+0.304X5+0.095X6+0.038X7+0.067X8+0.287X9+0.429X10+0.193X11
3.3 安装精度要求
货架安装精度要求立柱直线度≤L/1 000,且≤5 mm;立柱垂直度≤15 mm;同层货位高低差度误差≤±3 mm;上轨道直线度轴距内≤±1.5 mm,全长≤±3 mm,轨道接头处两侧各0.1m 范围内高差≤±0.5 m;下轨道直线度轴距内≤±1.5 mm,全长≤±3 mm;不平度轴距内≤±1.5 mm,全长≤±3 mm;轨道接头处两侧各0.1 m 范围内高差≤±0.5 mm。
4 电气控制系统设计
4.1 总体设计方案
ECS 由逻辑控制器、检测元件和执行元件等组成。ECS 采用分布式控制方式,接收WCS 的调度指令,实现对托盘输送系统、堆垛机、穿梭车等控制;同时ECS将获取到的货物及设备信息上报给WCS,使WCS 实时掌控设备的运行状态及指令的执行状态,以便及时调整调度及控制策略,实现智能化调度及控制。ECS 软件和硬件均采用模块化设计,具有成熟度高,复用性强等特点。ECS 由若干PLC 分区组成,WCS 通过信息系统软件(以下简称OPC)与各个PLC 进行通信,PLC 之间通过以太网总线进行通信。PLC 控制分区内部通过现场总线构建分布式控制系统。控制系统架构如图8 所示。

图8 控制系统架构图
4.2 系统网络
项目系统采用以太网组建管理与调度系统网络,实现WMS/WCS 内部及ECS 与WCS 之间通信,网络介质采用光纤(通讯距离大于100 m)或超6 类屏蔽双绞线(通讯距离小于100 m)通信,通过网络交换机,完成WCS 系统与ECS 系统中各个PLC 主站间高速、可靠和方便的信息交互和调度控制。采用开放式的高速以太网,组建分布式控制系统网络,实现控制系统中各PLC 之间及与现场各个分布式从站之间的通讯。控制系统网络中,主控柜(以下简称MCP)与远程控制柜(以下简称CPL)之间采用工业以太网Profinet 连接,使用超六类屏蔽双绞线完成现场通信线缆的敷设。堆垛机、穿梭车与地面MCP 采用红外光通信。控制系统网络设计的节点数按标准进行预留,以满足系统扩展要求,并使ECS 系统运行得更稳定、可靠、高效。系统网络示意如图9 所示。

图9 系统网络示意图
4.3 系统控制模式
系统整体控制包含联机在线全自动、单机自动、手动和维修4 种控制模式。
1)维修模式 在维修模式下,设备可通过触摸屏或手动按钮点动操作运行,人工对各电动机进行正、反转启动/停止操作。维修模式下,变频驱动的设备均按低速运行,电动机均为点动运行,以免出现故障。维修模式除急停或基本的安全保护回路外,逻辑检测回路均被屏蔽。维修模式用于程序投产前的调试和元器件故障时的检修。
2)手动模式 在手动方式下,设备可通过触摸屏或手动按钮操作设备,人工对各电动机进行正、反转启动/停止操作,并执行完一个完整的运动流程。手动模式下,变频驱动的设备均按正常速度运行,电动机可根据逻辑设定执行运动。手动模式可用于系统动作逻辑和传感器元件的调试、一般的设备故障处理和设备的手动输送操作。
3)单机自动模式 控制系统在单机自动方式下与上位计算机离线,通过人工输入的指令实现对各输送设备的自动控制,实现物流上点对点的操作作业等。单机自动模式下,系统可按单个命令的作业方式,根据系统传感器检测,自动对各输送设备的自动控制、运动的启停和运动中数据的跟踪,实现货物的物流作业。单机自动模式用于在上位计算机离线时的系统调试和货物存取。
4)在线全自动模式 控制系统通过在线全自动控制方式由计算机下达命令,控制系统接收后实现对各设备的自动控制,实现对物流和数据流的自动传输,并在上位计算机系统上实时显示并作日志记录。系统可根据设备的运行状态和指令的优先顺利,实时调整物流线路的规划和货物的运动流程,柔性地实现物流和信息流的高度统一。
4.4 堆垛机
有轨堆垛机是自动化仓储物流系统中的核心设备,用于存储单元出入货架的搬运作业,具有速度快、效率高、安全可靠等优点。堆垛机通过仓库电气控制系统与上位监控管理系统联机组态后,与地面输送系统、高层货架和托盘等一并组成了完整的自动化仓储物流系统,从而实现货物存取、传输和分拣等。堆垛机主要由龙门架、底梁(含行走机构)、载货台、货叉、提升机构、上/下轨道、安全机构、检测机构、控制系统、供电滑触线等组成。本项目堆垛机采用双立柱直行双深位单工位堆垛机,堆垛机额定载荷1 050 kg,载货单元尺寸为1 300 mm×1 100 mm×1 350 mm。堆垛机运动控制系统要同时满足快速、平稳和准确3 个方面的要求,故速度的控制至关重要。本项目堆垛机的水平行走、垂直提升和左右方向的取送货动作均采用变频无级调速。
堆垛机设计的水平行走速度为0 ~120 m/min,水平行走加速度为0.35 m/s2;垂直升降速度为0 ~40 m/min,垂直升降加速度为1 m/s2;货叉伸缩速度为30/60 m/min,货叉伸缩加速度为0.5 m/s2。垂直升降和水平行走采用激光定位,货叉运行采用编码器和接近开关方式进行定位。水平方向定位精度为±5 mm,垂直方向和货叉定位精度±为3 mm;堆垛机与地面控制系统采用大带宽红外光进行通信。堆垛机如图10 所示。

图10 堆垛机示意图
4.5 往复式穿梭车
往复式穿梭车是一种在直线轨道上运行,用于货物水平搬运的设备,具有简单可靠、调度灵活等优点。往复式穿梭车主要由行走机构、输送设备、导轨、检测装置、控制系统等组成。穿梭车在接收到作业指令后,通过精确认址方式定位于指定输入工位,接收物料后进行往复穿梭运行,将货物输送到指定输出工位。本项目穿梭车额定载荷1 050 kg,载货单元尺寸为1 300 mm×1 100 mm×1 350 mm。往复式穿梭车的水平行走、垂直提升和左右方向的输送动作均采用变频无级调速。水平行走采用激光定位,升降和输送采用光电开关方式进行定位。水平运行速度为0 ~120 m/min,加速度为0.6 m/s2,定位精度±3 mm;输送机输送速度0~18 m/min,定位精度±5 mm;升降速度0 ~25 m/min,定位精度±5mm;轨道采用30 kg/m 轻轨;穿梭车与地面控制系统采用大带宽红外光通信方式。穿梭车如图11 所示。

图11 穿梭车示意图
4.6 托盘转换器
托盘转换器是一种实现将负载从原有托盘分离转移到另外一种托盘上的设备,由底座、旋转体、旋转机构、上夹臂、下夹臂、侧臂、辊道、电气控制箱及液压站组成;上下夹臂上带有辊道,与外部(输送单元)连接实现自动传输功能。本项目托盘转换器的主要功能为将负载从塑料托盘转移到木制托盘,以实现塑料托盘的回库。项目采用的托盘转换器总体尺寸为2 560×1 900 mm×3 100 mm;旋转机构、夹臂机构、侧臂机构均采用液压驱动;旋转幅度为180°;旋转速度为2.5 r/min;输送速度为18 m/min;全流程动作时间控制在24 s 内 。托盘转换器如图12 所示。

图12 托盘转换器示意图
4.7 拆/码盘机
托盘拆/码盘机是托盘出入库系统的专用设备,托盘拆盘机可同时用于拆/码托盘。拆盘机用于将已经码好的空托盘垛逐一发放到输送系统中,用于码货。码盘机用于将空托盘逐一进行叠放,用于空托盘的叠放入库。本项目拆/码盘机输送速度18 m/min;效率3 p/min;叠放层数为9 层,叠盘定位精度±10 mm。拆/码盘机如图13 所示。
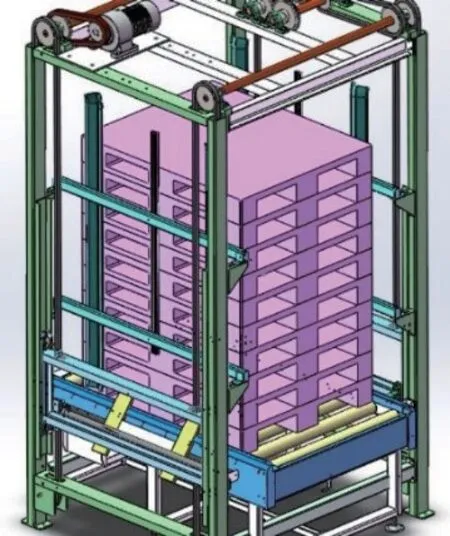
图13 拆/码盘机示意图
5 仓库管理与调度系统的设计
自动化立体仓储自动调度及监控和管理系统负责对立体库的所有工艺设备进行逻辑的控制、监控和管理,使立体库的所有工艺设备按照工艺和作业流程协调运行,实现自动化立体库工艺设备的联机在线全自动控制,实时监控,并对库存货物进行相应管理。
5.1 仓库管理系统
5.1.1 仓库管理系统结构
WMS是对物料进行管理的软件,集成出入库业务、盘点业务、调拨业务、LED信息显示、作业状态仿真监视、报警显示等相关功能。仓库管理系统分为系统设备硬件及仓库管理软件2 部分。系统硬件按工业标准配置,其主要设备包括:数据库服务器、工作站、手持终端、磁盘阵列等。仓库管理系统全部采用图形用户界面,有相应的操作提示和操作指导功能,任务之间切换便捷。数据录入可接受手工键盘输入、条码识别系统输入或其他快速输入方法。软件设计采用模块化和层次化,系统软件层次结构如图14 所示。

图14 系统软件层次结构图
5.1.2 软件功能架构设计
根据项目的需求,本项目系统WMS 功能划分为仓库业务管理、基础数据管理、系统管理、查询统计、设备运行监控、库存预警、报表分析、系统数据备份和信息系统接口等功能模块。
5.2 仓库控制系统
5.2.1 仓库控制系统结构
WCS 位于WMS 和物流设备之间的中间层,实时与WMS 进行信息交互,接受WMS 的任务,并将指令分解下达到底层PLC,从而驱动输送机、堆垛机等自动化设备动作。同时WCS 对物流运行的路径进行规划,传递底层物流设备的工作状态给WMS 管理软件,达到监控物流设备状态的目的。仓库控制系统软件结构如图15 所示。

图15 系统软件层次结构图
5.2.2 软件功能架构设计
根据项目的需求,本系统WCS 功能划分为:指令管理、数据采集、设备管理、设备监控、作业管理、异常处理、故障报警、报文管理、OPC 状态监控、系统日志等功能模块。
5.3 系统配置
仓库管理与调度系统主要配置为DELL R730 服务器3 台;Windows server 2012 操作系统3 套;SQL Server2014 数据库1 套;DELL MD3 磁盘阵列1 台;ROSEHA 双机热备1 套;DELL 工作站2 台;CiperLab 9700 手持终端5 台。
6 结语
自动化立体仓储的设计须充分进行系统调研和需求分析,对基础数据进行充分的掌握,才能对仓库的整体规划、作业方式、出、入库搬运周期及出、入库能力验算、系统功能等相关业务进行针对性有效性地开展工作。本项目通过压力测试以及交付后的长时间运行使用,自动化立体仓储系统运行正常,出入库效率也基本符合当初的规划预期,实现了仓储管理的智能化。
