移动凸轮变阻尼隔振装置动态性能研究
2023-10-18邢海军吕书锋
王 兰, 邢海军, 吕书锋
(1. 石家庄铁道大学 机械工程学院, 石家庄 050043; 2. 内蒙古工业大学 理学院, 呼和浩特 010051)

近年来,非线性阻尼隔振器由于其具有随频率比变化而改变阻尼比的优点,而得到众多学者的关注。Ravindra等[4-5]对同时具有刚度和阻尼非线性的隔
振器动力学响应和性能进行了理论研究,给出了平方、立方阻尼对系统动力学特性的影响规律。贺辉等[6]使用两级变阻尼TMD来控制圆形高耸结构的风致振动,并取得了较好的效果。Gong等[7]对某三层带黏弹性阻尼器的钢框架结构进行了试验研究,并进行非线性动力时程模拟分析。黄宙等[8-10]提出了一种新型自复位放大位移型SMA阻尼器,该阻尼器可将位移变形根据实际工程需要进行放大,充分发挥SMA材料的耗能能力。20世纪40年代Rabinow[11]首次发现磁流变现象。磁流变液被用于阻尼器中,磁流变阻尼器具有阻尼可调、阻尼力调节范围宽、易于实现实时控制等优点,被快速用于阻尼控制技术中[12-14]。Mousavi-Bideleh 等[15]选取磁流变半主动抗蛇行减振器阻尼特性参数为研究对象,通过数值仿真进行了车辆动力学性能优化。Wang等[16]对低频振动下的铁磁液体阻尼器性能进行了研究。Jiao等[17]研究了考虑阻尼孔的入孔效应时,微振动流体黏滞阻尼器的非线性动力学特性。金天贺等[18]对不同轮轨接触状态的高速列车在采用可变刚度和阻尼半主动悬挂抗蛇行减振器时的车辆动力学性能进行研究分析。Yu等[19]设计了一种可变阻尼和刚度的磁流变隔振器并进行了实验,结果表明该隔振器在低频和高频条件下均能提供更大的可控阻尼力和更好的能量耗散能力。Peng等[20-21]分别使用谐波平衡法和平均法对立方阻尼隔振器进行了研究。刘兴天等[22]提出了一种几何非线性摩擦阻尼隔振系统,该系统可以在保持高频振动衰减效果的前提下,显著降低系统共振峰。Vu等l[23]建立了某重型车辆的电子伺服阀液压阻尼器模型,并由试验数据验证了模型的准确性。Domenico 等[24]等进行了非线性流体黏滞阻尼器耗能结构的抗震性能研究。王琳等[25]对液压阻尼器的控制阀结构进行优化设计,提高了阻尼器控制阀的闭锁响应效果。余慕春等[26]研究了具有变阻尼特性的剪切增稠液体(shear thickening fluid, STF)隔振器,当远离共振频率时,隔振器具有小阻尼特性,在共振区附近,阻尼骤然增加,实现对共振峰的有效抑制。闫明等[27]提出了阻尼力流动指数,用于确定舰载设备隔振系统中双出杆液压孔隙式黏滞阻尼器非线性阻尼力的计算。赵祥等[28]研发了一种新型变阻尼式调谐质量阻尼器(tuned mass damper, TMD),当该减震装置的刚度、质量和液体黏度增大时,能够很好的控制结构的加速度和位移响应。付伟庆等[29-30]设计了一种新型被动变阻尼耗能装置(passive variable damping device, PVDD),其阻尼系数可随外部激励速度大小连续可变,速度大时阻尼系数也相应变大。蒲华燕等[31]提出一种具有频变阻尼特性的四参数隔振系统并进行了仿真验证,该隔振系统能有效降低共振峰,高频时也表现了良好的隔振性能。
综上所述非线性变阻尼隔振器对共振峰的抑制有一定效果,变阻尼隔振系统的阻尼系数可以随外部激励变化的变化而变化,隔振效果优于线性隔振器,但是它们因为自身的特点都会有一局限性。本文提出一种非线性变阻尼装置,不需要外界输入能量,系统振动时,利用滚子在凸轮导轨中上下移动,实现垂直方向阻尼力的变化,该装置采用合适的设计参数,可以在系统偏离平衡位置的位移大时提供大阻尼力,偏离平衡位置的位移小时提供小阻尼力,对共振峰的抑制效果明显优于线性隔振器,同时在高频区的隔振效果也不逊于线性隔振器。
1 非线性变阻尼隔振装置
1.1 非线性变阻尼隔振系统设计模型
非线性变阻尼装置如图1所示,包括对称水平布置的一对相同的线性阻尼器、移动凸轮、滚子及滑动导轨。线性阻尼器的阻尼缸固定不动,当移动凸轮随系统上下振动时,滚子通过滑动导轨带动阻尼器的活塞杆相对阻尼缸产生水平移动,从而产生阻尼力。由于线性阻尼器及滚子水平对称,阻尼力的水平分力自相平衡,垂向分力合成为垂直变化的阻尼力。

图1 变阻尼装置设计图Fig.1 Design diagram of variable damping vibration isolator
1.2 等效阻尼系数
变阻尼装置中,水平线性阻尼器可以根据使用要求多对对称布置。文中仅就采用一对线性阻尼器对称布置的变阻尼装置进行分析。
为了分析垂直方向的等效阻尼系数,取一侧的线性阻尼器+滚子+移动凸轮作为分析对象,建立如图2坐标系,进行静力平衡分析。凸轮所受外力有:凸轮及系统的重力Fg、弹簧的支撑力Fs、沿x轴方向地面激励F的作用、垂直于滚子和凸轮接触点切线方向的作用力Fn,当滚子的表面足够光滑时,可以忽略滚子与凸轮表面的摩擦力,弹簧的静变形等于凸轮及系统的重量。在静载作用下,系统处于平衡位置,此时凸轮廓线的对称中心和滚子中心在同一水平线上。如图2(a)中根据静力平衡得到

(a) 凸轮静力分析原理图
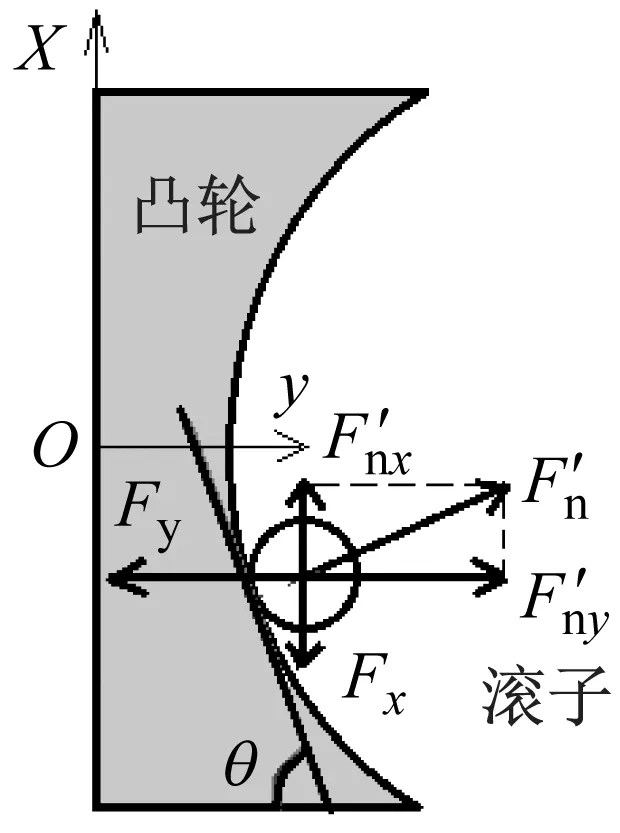
(b) 滚子静力分析图图2 变阻尼装置静力分析原理图Fig.2 Schematic diagram of hydrostatic analysis of the variable damping vibration isolator
(1)
式中:Fs为弹簧力;Fnx为滚子作用在凸轮上的力Fn在x轴方向上的分力;ks为弹簧的刚度;不考虑滚子的变形,认为凸轮滚子在分析平面内为点接触,则θ是凸轮滚子接触点处切线与y轴正向的夹角。
在图2(b)中,当y方向受力平衡时,有:
(2)

由式(1)和(2)得:
(3)
tanθ可以看成凸轮曲线在凸轮与滚子接触点的切线的斜率,则:
(4)
由式(3)和式(4)可得
(5)
水平阻尼器为线性阻尼器,且阻尼系数为c′,则:
(6)
把式(6)代入式(5)得到
(7)
变阻尼装置为一对对称布置移动凸轮+滚子,则垂直方向的当量阻尼力Fdx为水平方向线性阻尼力Fnx的2倍。
(8)
设垂直方向当量阻尼系数为c,则:
(9)
由式(8)和式(9)得到垂向阻尼为
(10)
若凸轮理论廓线采用二次曲线
(11)
式中,a为凸轮二次曲线形状控制系数。将式(11)代入式(10)得到垂向等效阻尼系数为
c=2c′(ax)2
(12)
由式(12)可知垂直方向等效阻尼系数随系统垂直位移的变化而变化。
2 动力学分析
2.1 消极隔振的解析解
变阻尼隔振系统原理如图3所示。当系统受到地面简谐干扰激励时,在平衡位置附近上下振动,系统振动微分方程为

图3 变阻尼隔振系统原理图Fig.3 Schematic diagram of variable damping vibration isolator
(13)


(14)
令y=Asin(ωt+θ),ω为地基干扰运动频率。采用谐波平衡法求解[32-33],得到结果见式(15)。
-Aω2(sinωtcosθ+cosωtsinθ)+

cos 3ωtcos 3θ+sin 3ωtsin 3θ)+

Bω2cosωt
(15)
令式(15)中两侧对应项系数相等,并略去高阶项得:

(16)
式(16)消去三角函数项得
(17)
(18)

(19)
(20)
式(19)为式(14)的幅频方程。采用盛金求解系统的振幅A。
设z=A2,则:
(21)


(22)
所以相对位移的振幅
(23)
2.2 位移传递率
2.2.1 位移传递率求解
位移传递率是评估被动隔振器的重要指标。位移传递率为系统振动的位移幅值与地基干扰运动位移幅值的比值。线性系统的位移传递率为
(24)
式中,Td为线性系统的位移传递率。
变阻尼隔振系统的主振幅求解如下。
由式(20)可得:
(25)
由y=x-x0,x0=Bcosωt可得:
x=y+Bcosωt=Asin(ωt+θ)+Bcosωt=
(26)
(27)
所以变阻尼隔振系统的振幅为
(28)
根据位移传递率的定义,由式(28)可得变阻尼隔振系统的位移传递率
(29)
将采用盛金法求解得到的位移传递率与采用4阶荣格-库塔法得到的数值解对比,检验解析解的准确性。对比结果如图4所示。由图4可以看出,数值解和解析解结果在多数区域一致,在共振区两种算法偏差略大,这是因为在解析算法中略去了3阶项,所以在共振区附近位移传递率偏差略大。

图4 位移传递率的数值法与解析法结果对比(ζ=0.03,B=0.2, a=5)Fig.4 The transmissibility curves using Harmonic balance method and numerical method (ζ=0.03,B=0.2,a=5)
2.2.2 位移传递率分析
由式(29)针对影响变阻尼隔振系统的位移传递率的3个主要因素—凸轮曲线形状控制系数a、相对阻尼系数ζ、地基干扰运动位移幅值B进行分析。
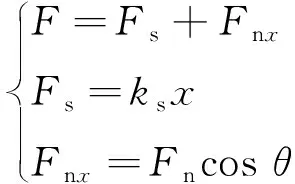
当地基干扰运动位移幅值B=0.2,相对阻尼系数ζ=0.05时,在不同凸轮曲线形状控制系数a值下的变阻尼隔振系统与线性隔振系统的位移传递率如图5所示。由图5可知:当采用相同的线性阻尼器时,在频率比Ω=1附近,位移传递率曲线有明显的峰值,对于变阻尼隔振系统a越大位移传递率越小,当a≥3时,变阻尼隔振系统对共振振幅的抑制作用明显优于线性隔振系统,但是a值过大,意味着变阻尼隔振装置中的水平阻尼器的行程过大,当使用空间受限时,这是不利的,所以在设计变阻尼隔振系统时,要选择合适的凸轮曲线形状控制系数a。由表1可知:在高频区变阻尼隔振系统的位移传递率同线性隔振系统一样,也是随着频率比Ω的增大逐渐减小,且隔振效果不逊于线性隔振系统。

图5 不同a值下变阻尼隔振系统与线性隔振系统的位移传递率对比(在ζ=0.05,B=0.2时)Fig.5 The transmissibility curves of variable damping vibration isolation system and linear damping vibration isolation system in different a (ζ=0.05,B=0.2)
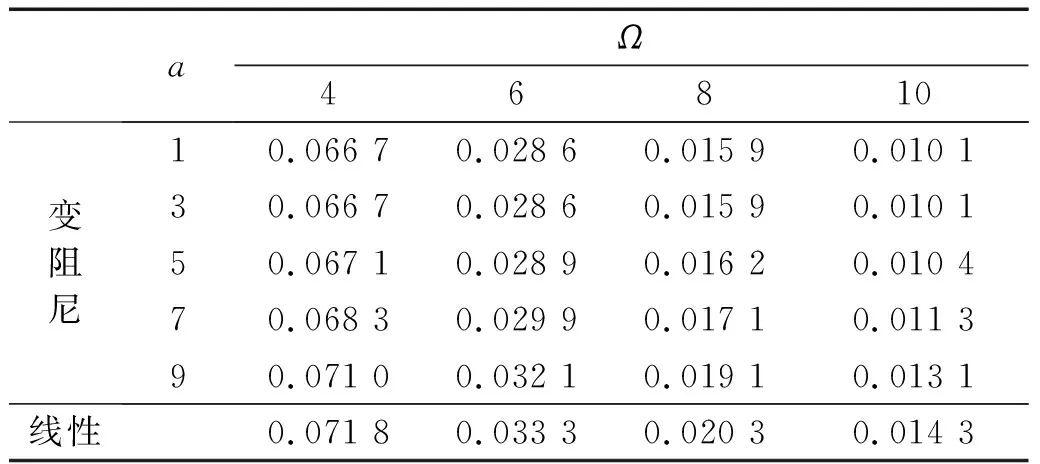
表1 不同a值下变阻尼隔振系统与线性隔振系统的在高频区位移传递率对比(在ζ=0.05,B=0.2时)Tab.1 The transmissibility curves of variable damping vibration isolation system and linear damping vibration isolation system in different a in the high frequency region (ζ=0.05,B=0.2)
当地基干扰运动位移幅值B=0.2,凸轮曲线形状控制系数a=5时,对于变阻尼隔振系统与线性隔振系统,在所采用的线性阻尼器相同时的位移传递率如图6所示。由图6可知:在频率比Ω=1附近,当相对阻尼系数ζ=0.03、0.05、0.10时,变阻尼隔振系统对位移传递率峰值的抑制作用明显优于线性隔振系统,且ζ越小,变阻尼隔振系统对共振峰的抑制作用优势越明显。由表2可知:在高频区变阻尼隔振系统的隔振效果也略优于线性隔振系统。

图6 不同ζ值下变阻尼隔振系统与线性隔振系统的位移传递率对比(在相同B=0.2,a=5)Fig.6 The transmissibility curves of variable damping vibration isolation system and linear damping vibration isolation system in different ζ (B=0.2,a=5)

表2 不同ζ值下变阻尼隔振系统与线性隔振系统在高频区的位移传递率对比(在相同B=0.2,a=5)Tab.2 The transmissibility curves of variable damping vibration isolation system and linear damping vibration isolation system in different ζ in the high frequency region (B=0.2,a=5)
当相对阻尼系数ζ=0.05,凸轮曲线形状控制系数a=5时,不同地基干扰运动位移幅值B值下变阻尼隔振系统的位移传递率及线性系统的位移传递率如图7所示。由图7可知:当采用相同的线性阻尼器时,在频率比Ω=1附近,变阻尼隔振系统的位移传递率明显小于线性隔振系统,且随着地基干扰运动位移幅值的增大,变阻尼隔振系统对位移传递率峰值的抑制效果越佳。由表3可知:在高频区,在不同地基干扰运动位移幅值下变阻尼隔振系统的位移传递率相差很小,且与线性隔振系统相比略有优势。

图7 不同B值下的变阻尼隔振系统与线性隔振系统的位移传递率对比(ζ=0.05,a=5)Fig.7 The transmissibility curves of variable damping vibration isolation system and linear damping vibration isolation system in different B (ζ=0.05,a=5)

表3 不同B值下的变阻尼系统与线性系统在高频区的位移传递率对比(ζ=0.05,a=5)Tab.3 The transmissibility curves of variable damping vibration isolation system and linear damping vibration isolation system in different B in the high frequency region(ζ=0.05,a=5)
3 实例验证
某中型载重车车厢空载质量为1 200 kg,满载时12 000 kg,等效刚度k=2×105N/m,阻尼c=500 N·s/m,车速为60 km/h,路面波幅分别为0.05,0.10和0.20 m,在采用相同的线性阻尼器时,对分别加装变阻尼隔振系统和线性隔振系统的车厢,进行数值仿真计算,得到车厢在路面行驶时的幅频响应见图8。由图8可以看出:在共振区(Ω=1附近),采用变阻尼隔振系统时,振幅明显小于线性系统,且路面波幅越大,变阻尼隔振系统抑制共振的效果越好;在高频区,变阻尼隔振系统与线性隔振系统的振幅基本相同。由位移传递率图9可知:在不同路面波幅下,在共振区(Ω=1附近),采用变阻尼隔振系统时,位移传递率明显小于线性系统,且路面波幅越大,变阻尼隔振系统位移传递率越小;在高频区,变阻尼隔振系统与线性隔振系统的位移传递率基本相同。由此可见,路面越是崎岖不平,采用变阻尼隔振系统在低频区抑制共振的效果越好。

图8 车厢在不同路面输入激励幅值B下的变阻尼隔振系统与线性隔振系统的幅频响应Fig.8 The amplitude-frequency response curves of the medium truck carriage with variable damping vibration isolation system and linear damping vibration isolation system in different B

图9 车厢在不同路面输入激励幅值B下的变阻尼隔振系统与线性隔振系统的位移传递率Fig.9 The transmissibility curves of the medium truck carriage with variable damping vibration isolation system and linear damping vibration isolation system in different B
以车厢质量8 000 kg,车速60 km/h为例,在随机输入激励(图10)下,且采用相同的线性阻尼器,对分别加装变阻尼隔振系统和线性隔振系统的车厢,进行数值仿真计算,得到车厢在路面行驶时的响应如图11、12所示。由图11、12可以看出:采用变阻尼隔振系统时,振幅远小于线性隔振系统,且振幅在可控范围内;而采用线性隔振系统时,振幅大且不可控,振幅随时间增大很快,这表明变阻尼隔振装置在随机输入激励下,抑制振幅的性能也显著优于线性隔振装置,具有一定的实际应用性。
图10 随机路面不平度Fig.10 The roughness of random road
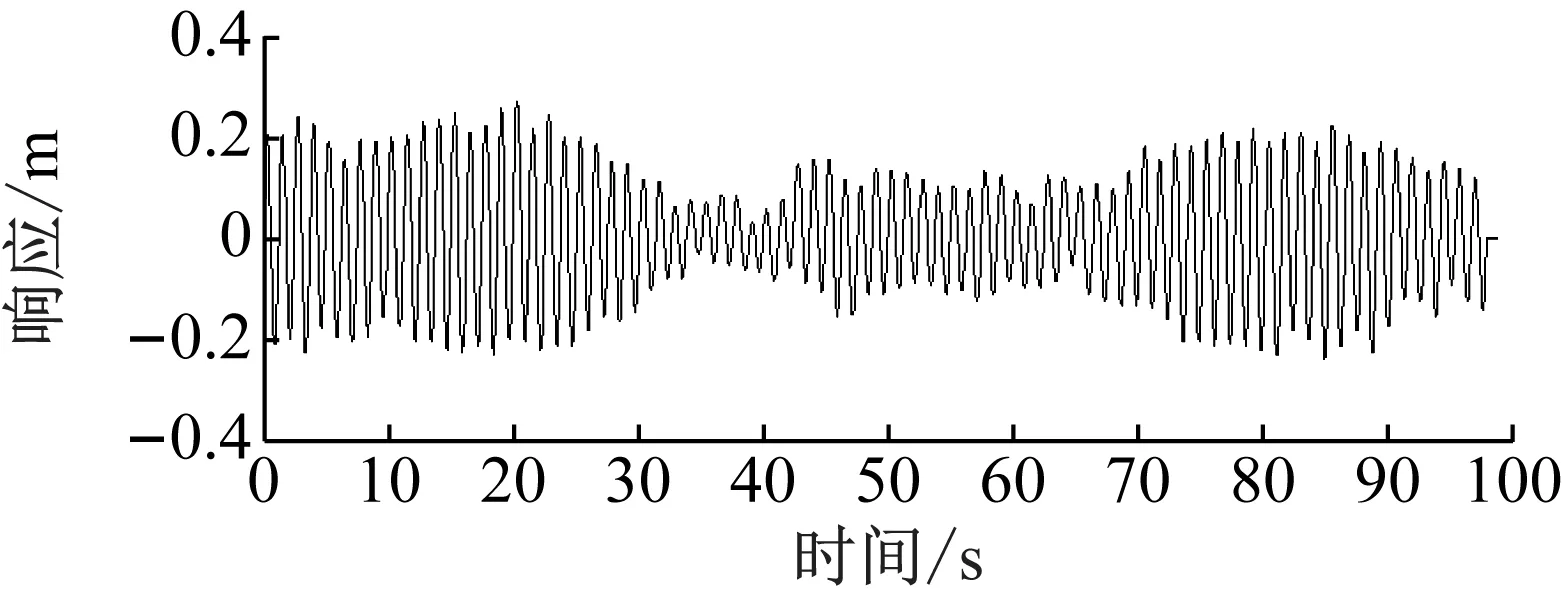
图11 随机路面输入激励下车厢在采用变阻尼隔振系统时的响应Fig.11 The response curve of the medium truck carriage with variable damping vibration isolation system on randomroad

图12 随机路面输入激励下的车厢在采用变阻尼隔振系统或线性隔振系统的响应对比Fig.12 The response curves of the medium truck carriage with variable damping vibration isolation system and linear damping vibration isolation system on random road
4 结 论
提出了移动凸轮变阻尼隔振系统,并对其进行了动力学分析,得到幅频方程。并通过数值仿真求解幅频方程,得到了位移传递率曲线,并进行了分析,得到以下结论:
(1) 在低频区,凸轮曲线形状控制系数a越大,变阻尼隔振系统对共振的抑制效果越好。在高频区,对于不同凸轮曲线控制系数a,隔振效果差别不大,且与线性隔振系统相比略有优势。
(2) 在低频区,相对阻尼系数ζ越小,变阻尼隔振系统对共振的抑制效果与线性隔振系统相比优势越大。在高频区,不同相对阻尼系数ζ下,变阻尼隔振系统的隔振效果基本相同,且与线性隔振系统相比略有优势。
(3) 在低频区,路面激励幅值B越大,变阻尼隔振系统对共振的抑制效果优势越明显。在高频区,变阻尼隔振系统的隔振效果与线性隔振系统基本相同。且在路面随机输入激励下,变阻尼隔振系统相比于线性隔振系统对响应的抑制同样具有明显的优势。
总之,该变阻尼隔振系统通过设置合适的凸轮曲线、水平方向阻尼器的阻尼系数,在低频区抑制共振的效果,明显优于线性隔振系统,且在高频区减振效果也不逊于线性隔振系统。
